
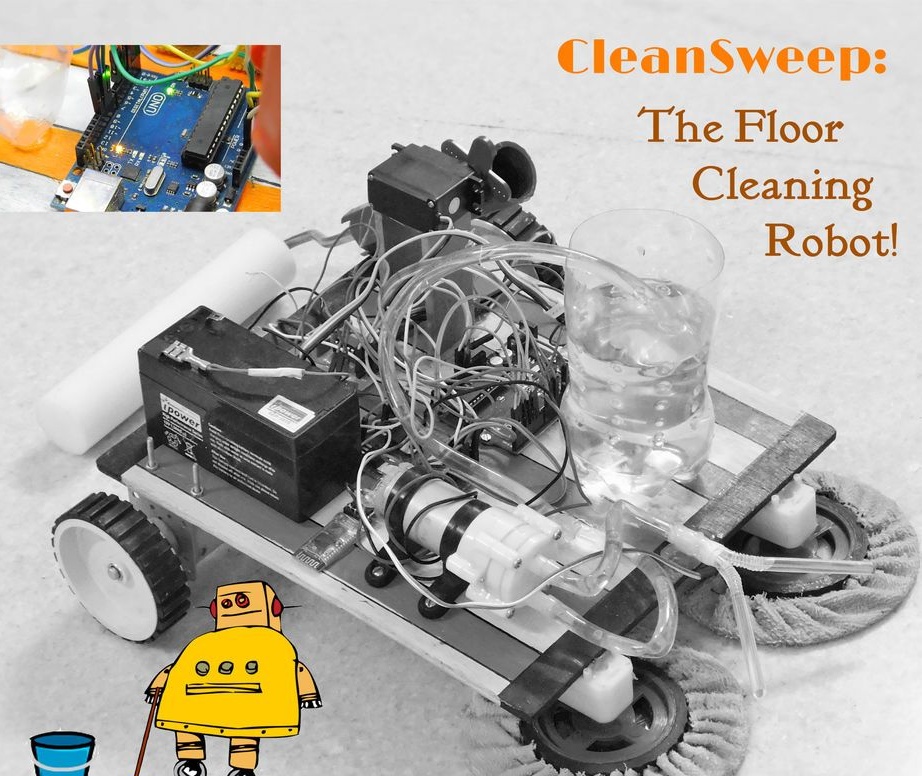


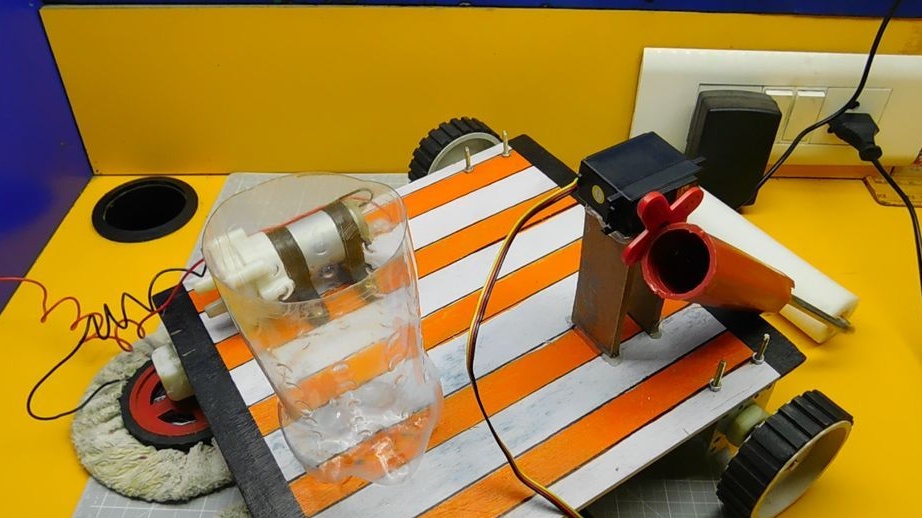
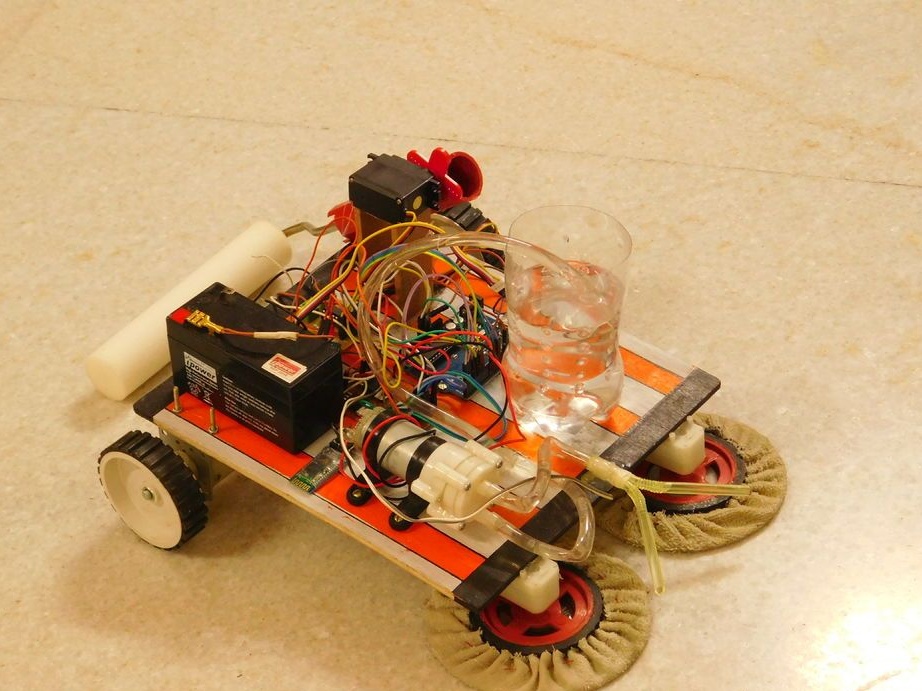
Der RoboterDer Mähdrescher hat in seinem Arsenal zwei rotierende Bürsten, die an der Vorderseite der Getriebemotorwelle angebracht sind. Das Getriebe dreht sich mit einer Drehzahl von 75 U / min. Der Roboter hat einen Wassertank an Bord. Eine Rolle ist an der Rückseite des Roboters befestigt. Der Roboter wird mit Hilfe von Rädern gemischt, die an der Achse des Getriebemotors befestigt sind. Der Reiniger wird per Smartphone über Bluetooth gesteuert. In Zukunft plant der Master, den Roboter vollständig autonom zu machen. Mal sehen, wie dieses Gerät funktioniert.
Werkzeuge und Materialien:
-Motorgetriebe 100 U / min -2 Stk;
-Räder für den Motor -2 Stk;
-Motor-Reduzierstück mit einem Rad von 75 U / min - 2 Stk;
-Arduino UNO;
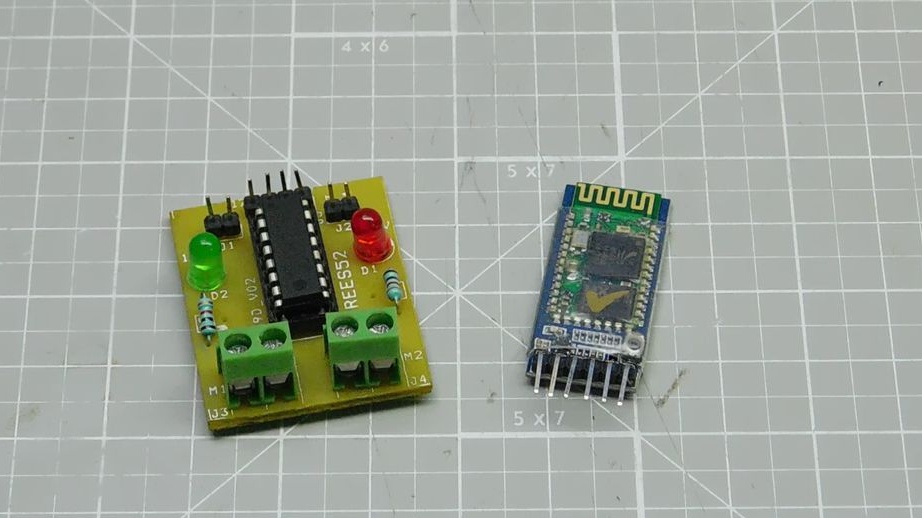
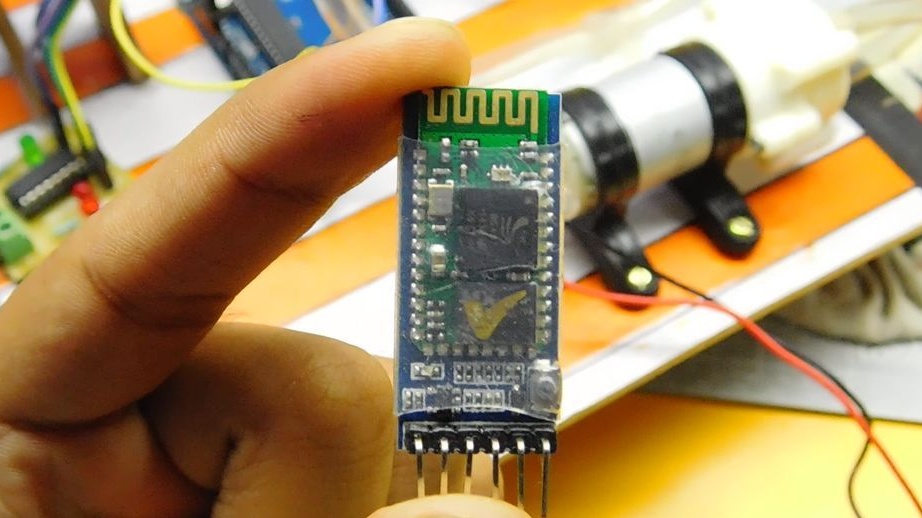
- Bluetooth-Modul HC-05/06;
-Treiber L293D;
- Servomotor (180 Grad Drehung);
-12V Batterie;
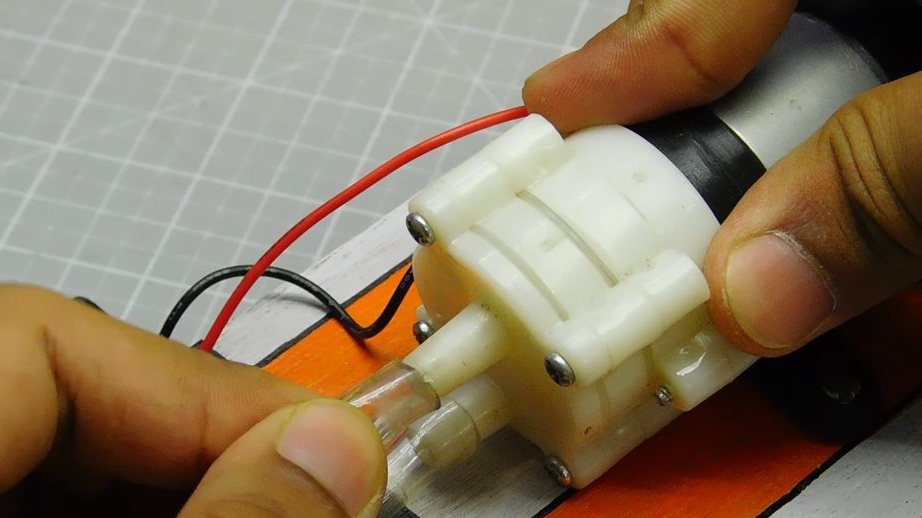
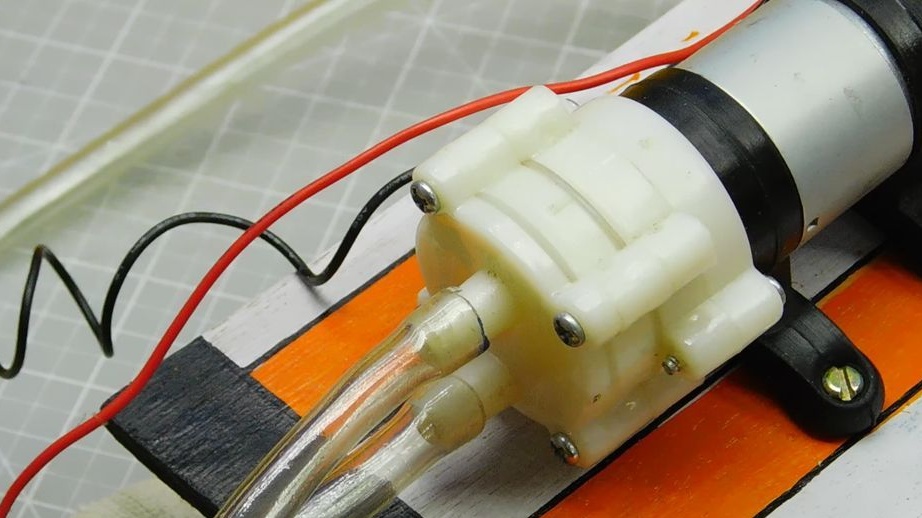
- Pumpe 12 V;
Transistor TIP31C;
Transistor TIP122;
- CD-Laufwerk - 2 Stück;
- Farbrolle;
- Stoffservietten;
- Nadel mit Faden;
-Tube;
-Wire;
- Springer;
-Montagebrett;
-Fasteners;
-Sperrholz;
-Plastikflasche;
-Lötkolben;
-Kleberpistole;
-Drill;
- Zangen;
-Dremel;
- Pinsel;
-Lack;
-Marker;
- Schere;











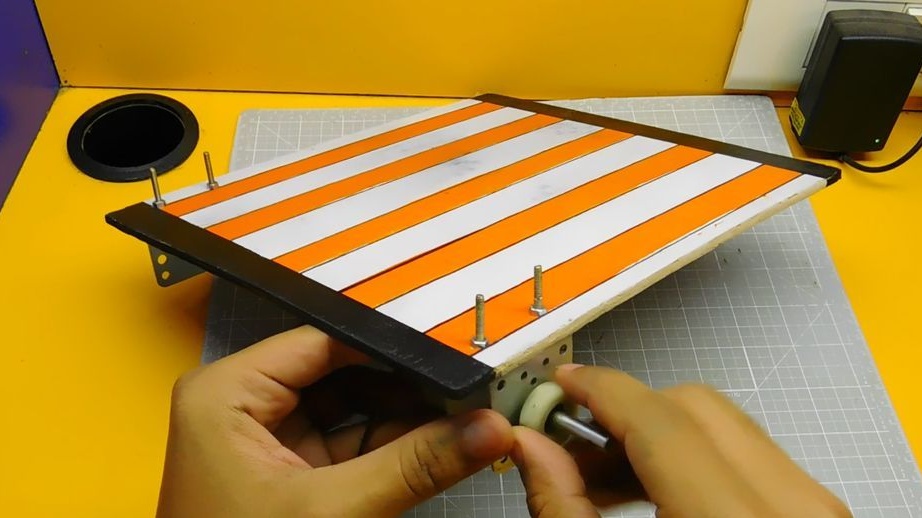
Erster Schritt: Gründung
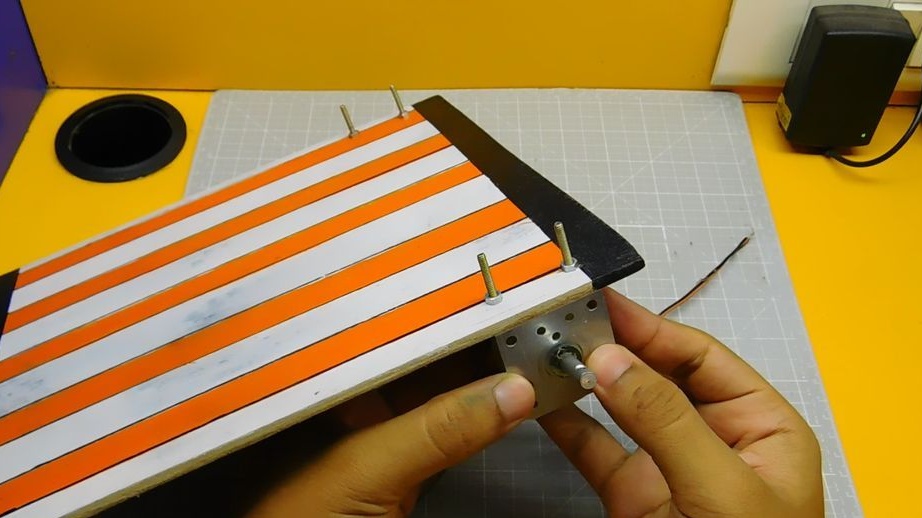
Aus Sperrholz schneidet die Basis. Die Größe der Basis beträgt 30 * 22 cm. Bemalt die Basis. Zum einen fixiert es den Getriebemotor. Befestigt den Getriebemotor koaxial auf der anderen Seite der Basis.



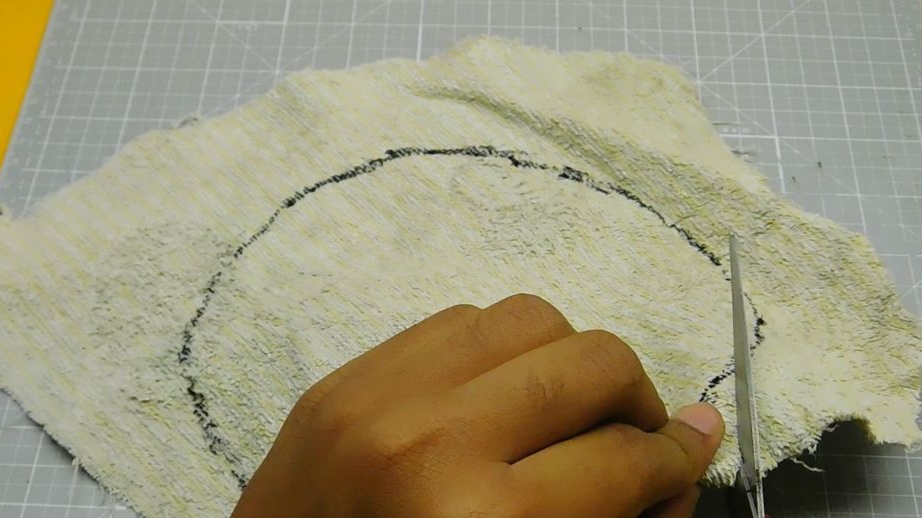
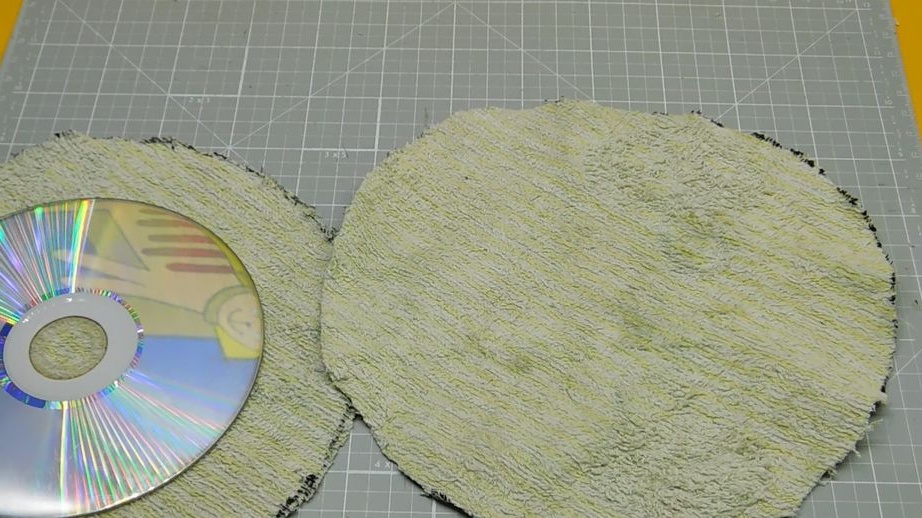
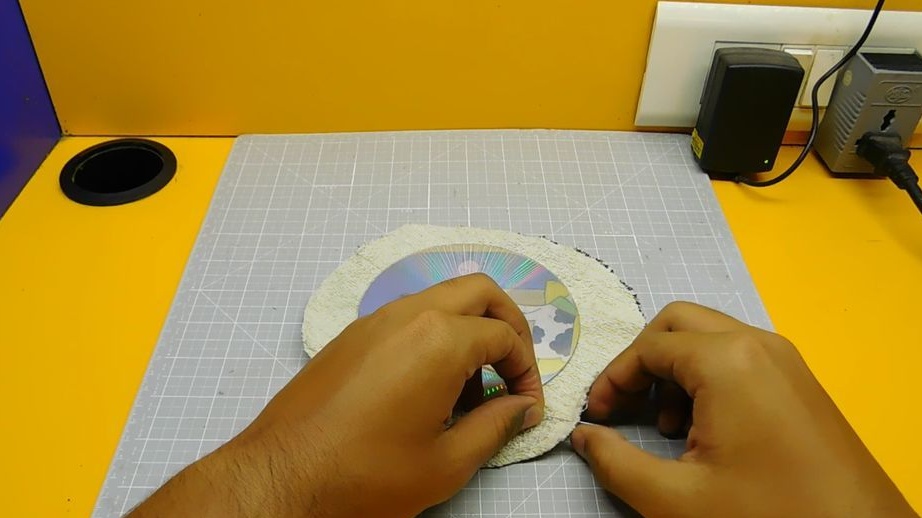
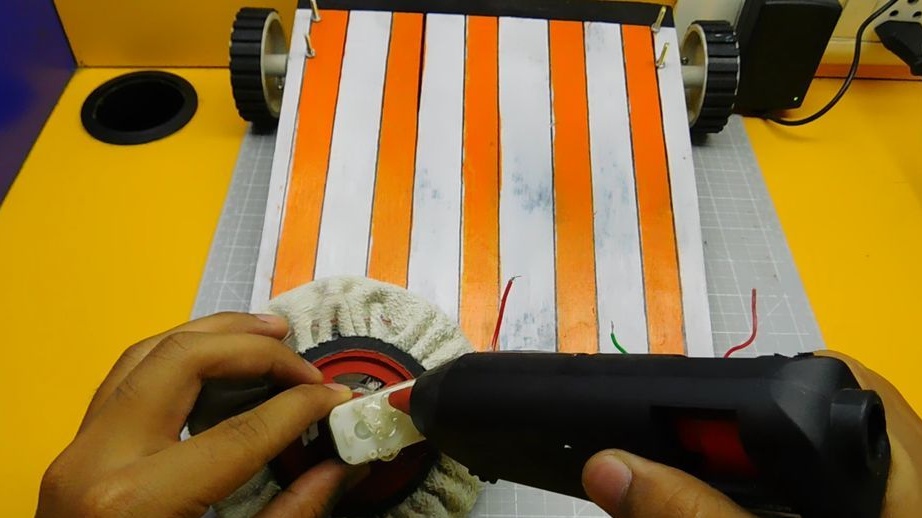
Schritt zwei: Pinsel
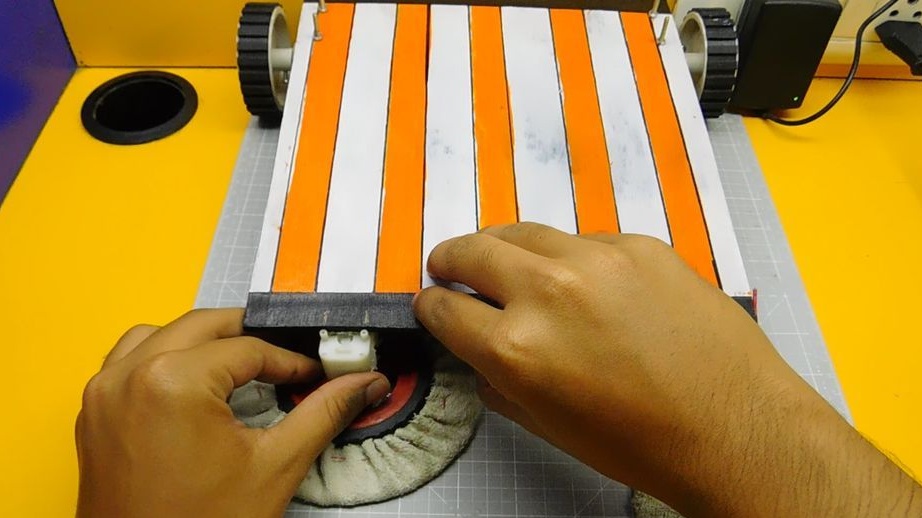
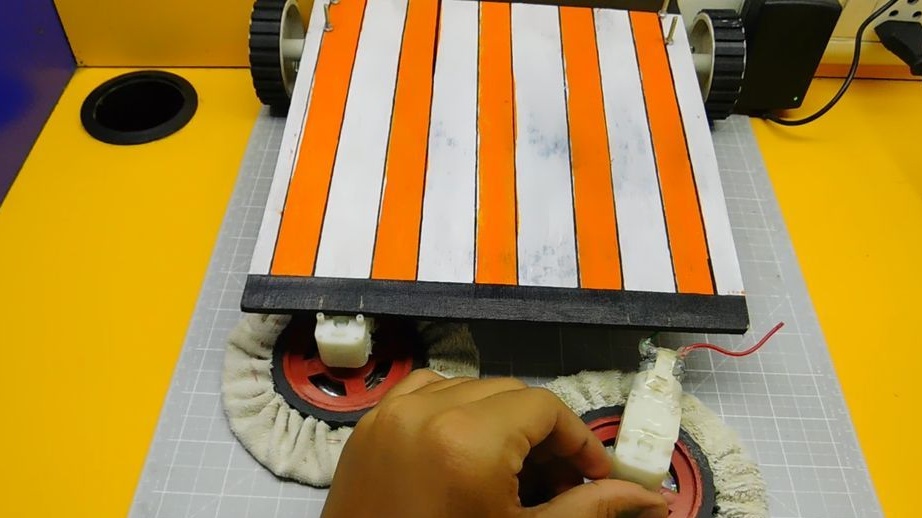
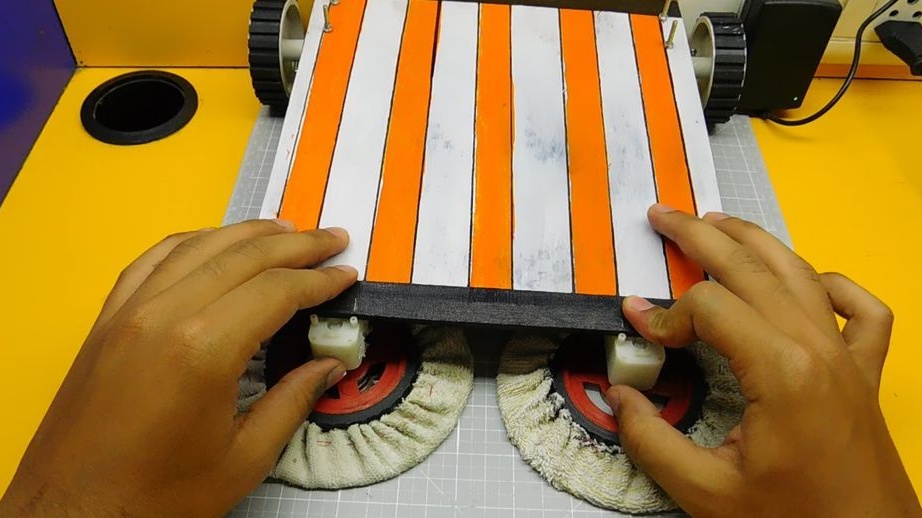
Der Meister machte Pinsel aus alten CDs. Schneiden Sie einen Lappen. Umhüllte ihren Antrieb. Wiederholter Vorgang mit einer anderen Festplatte. Die Scheiben mit Schmelzkleber am Getriebemotorrad befestigen. Beide Getriebemotoren vor der Plattform gesichert.








Schritt zwei: Wasserversorgung
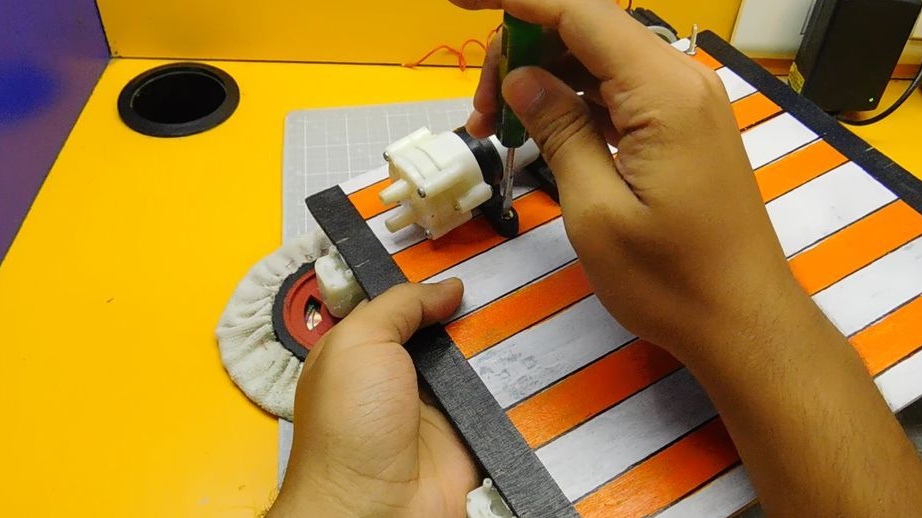
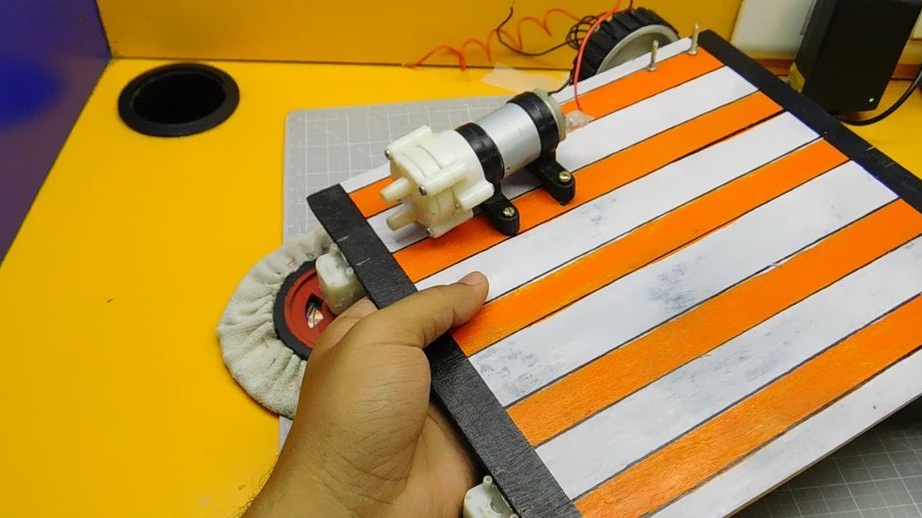
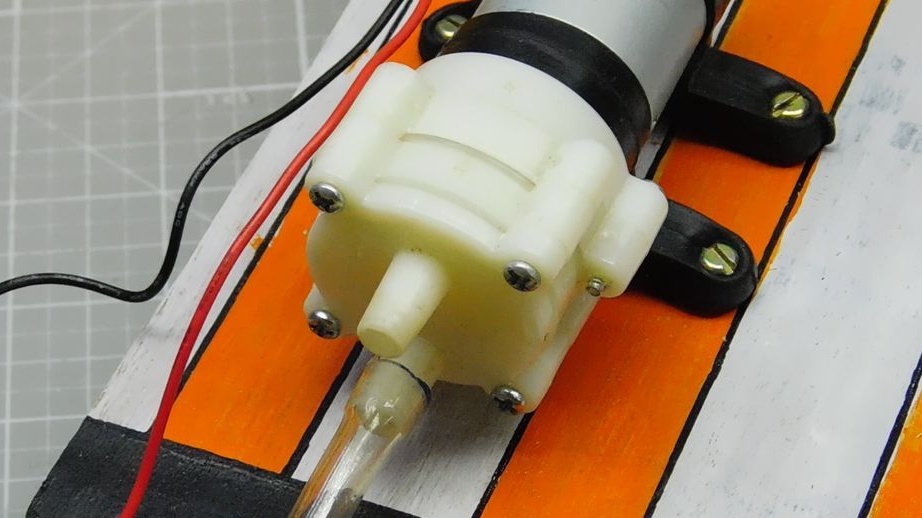
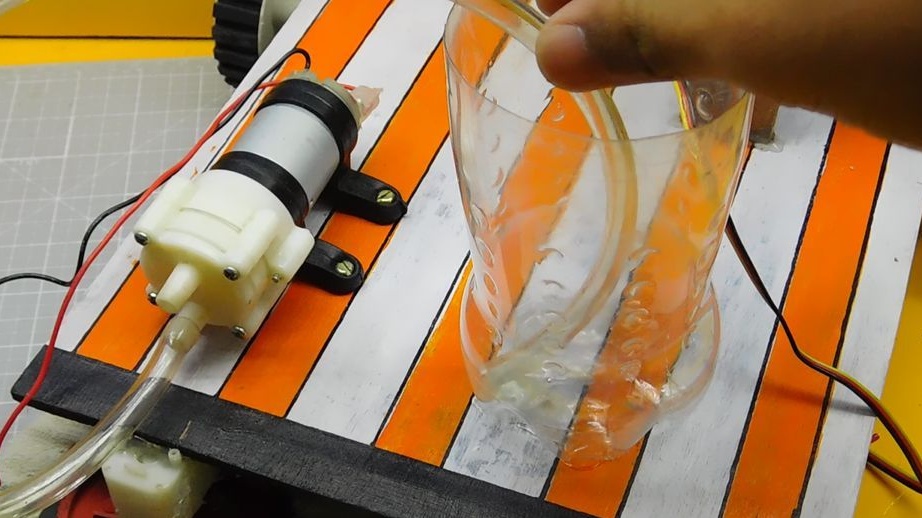
Sichert die Pumpe an der Plattform. Schneidet die Oberseite einer Plastikflasche ab. Befestigt die Flasche an der Plattform. Installiert ein Wasseransaugrohr. Später wird die Wasserzuleitung zu den Bürsten befestigt.








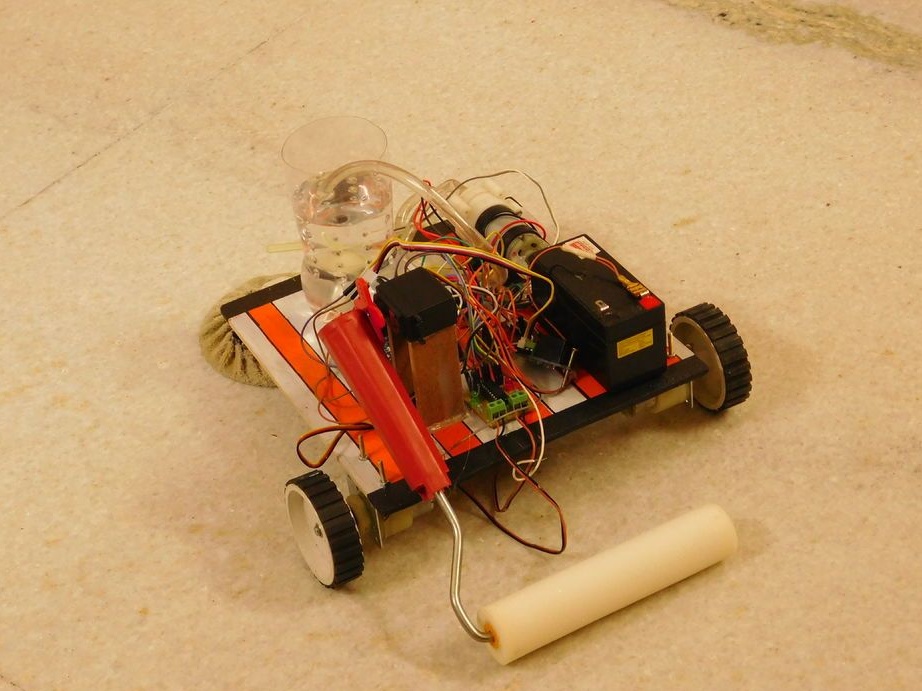
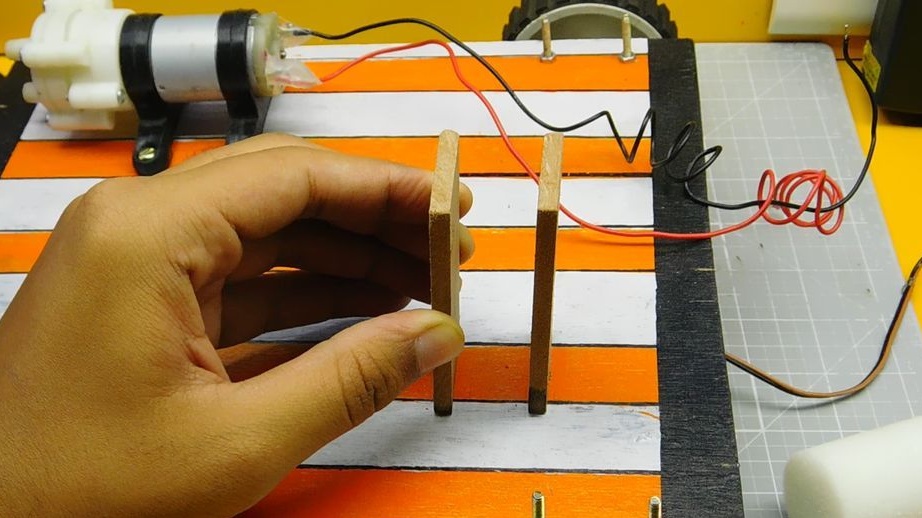
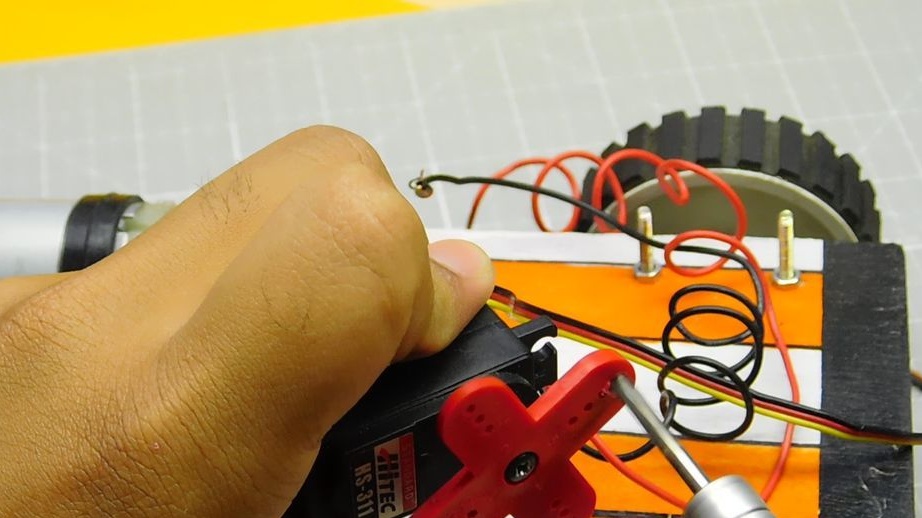
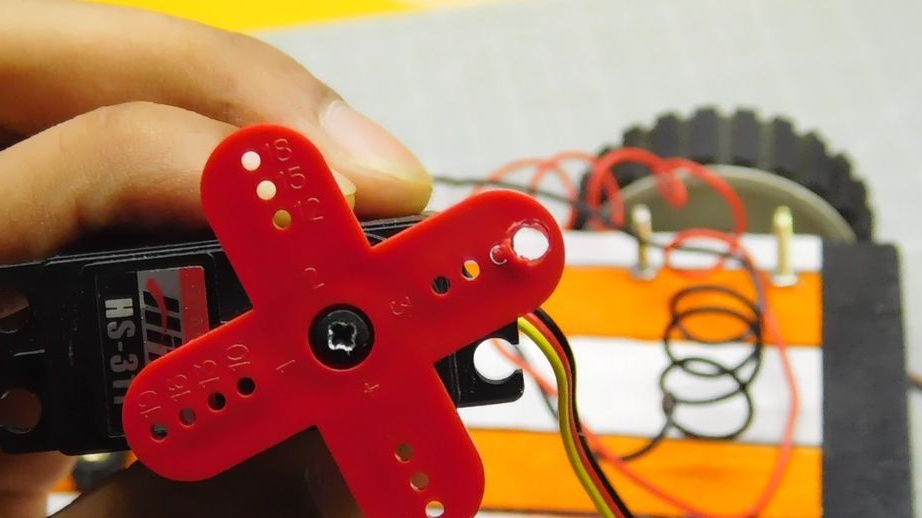
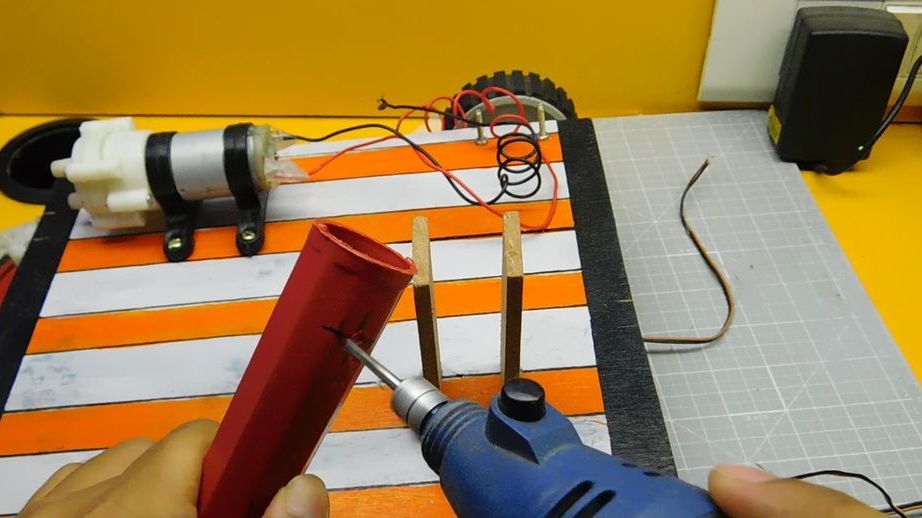
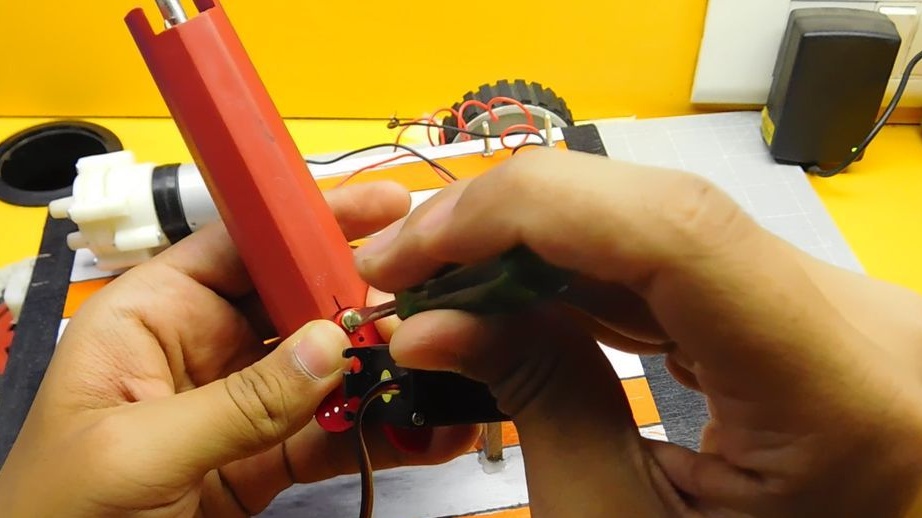
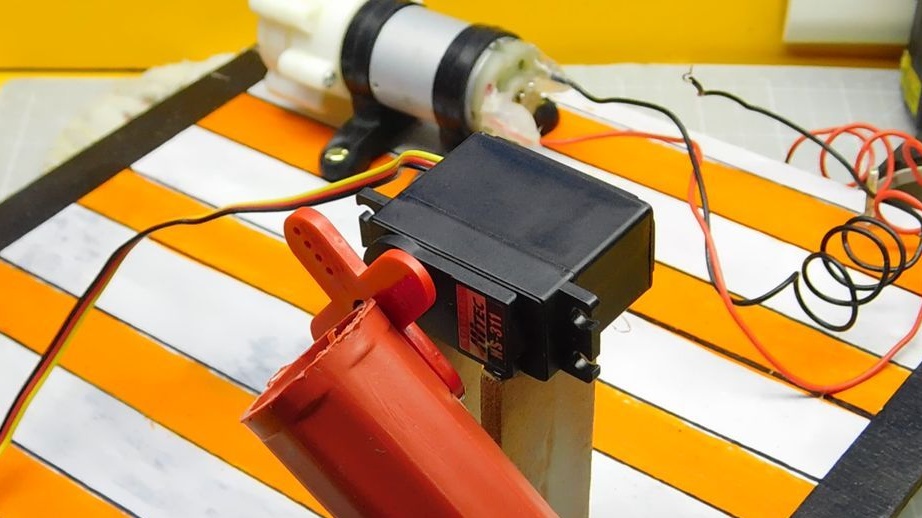
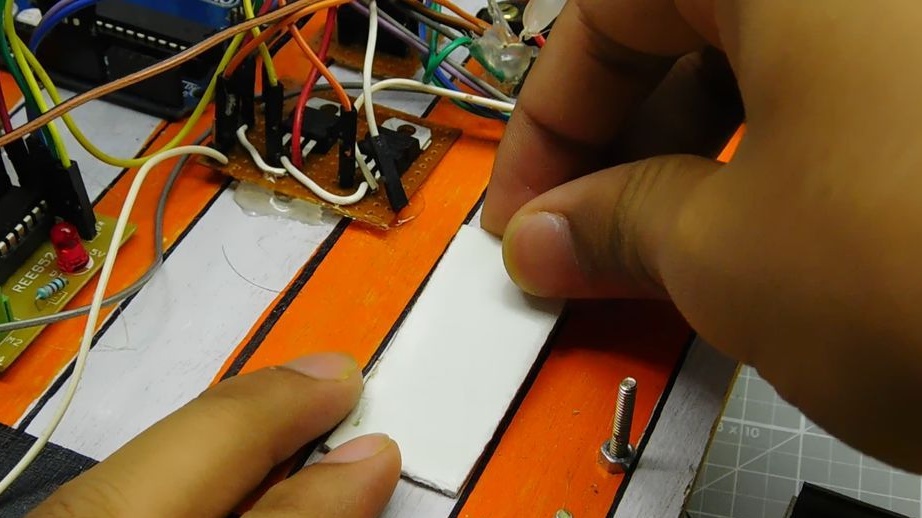
Schritt drei: Rollenliftmechanismus
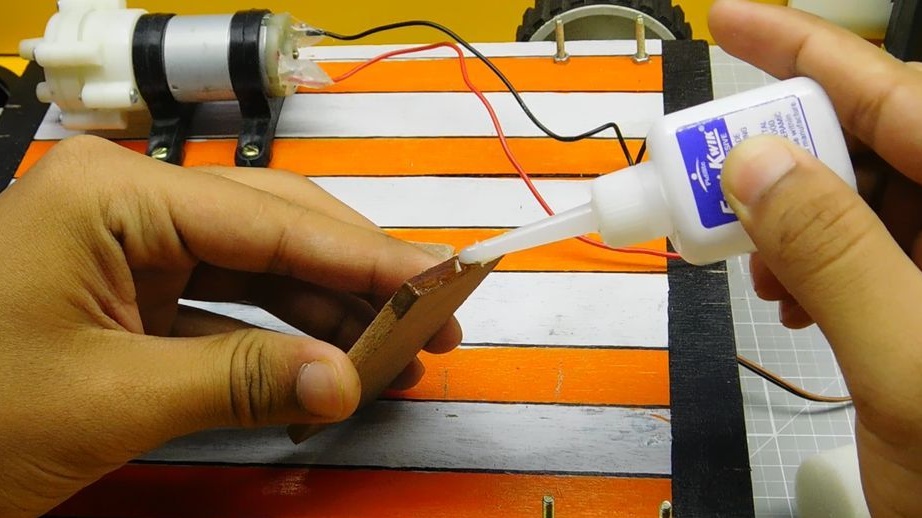
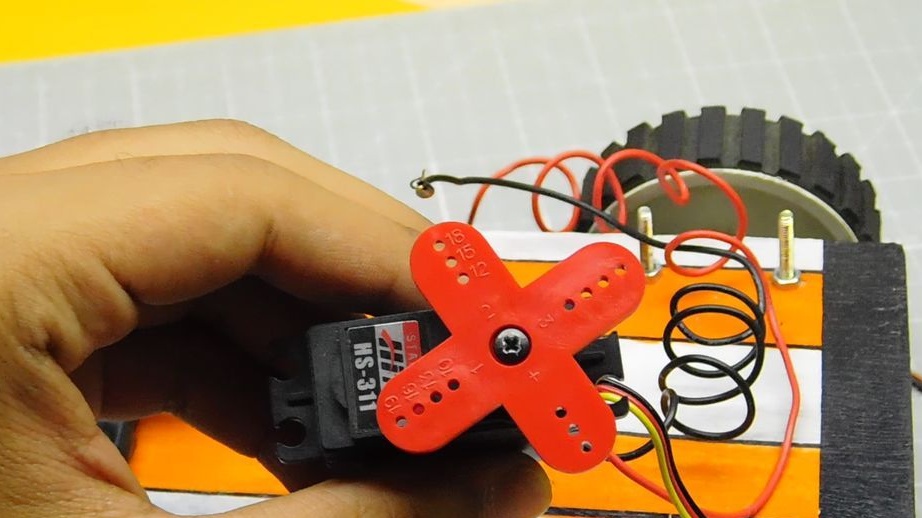
Die Aufgabe der Walze ist es, Feinstaub zu sammeln. Da die Walze gelegentlich benötigt wird, entschied sich der Kapitän für einen Mechanismus zum Anheben und Absenken der Walze. Befestigt zwei Lamellen auf der Plattform parallel zueinander. Macht zwei Löcher, eines im Servohebel, das zweite im Rollengriff. Schrauben Sie den Rollengriff an den Hebel. Sichert das Servo an den Lamellen.


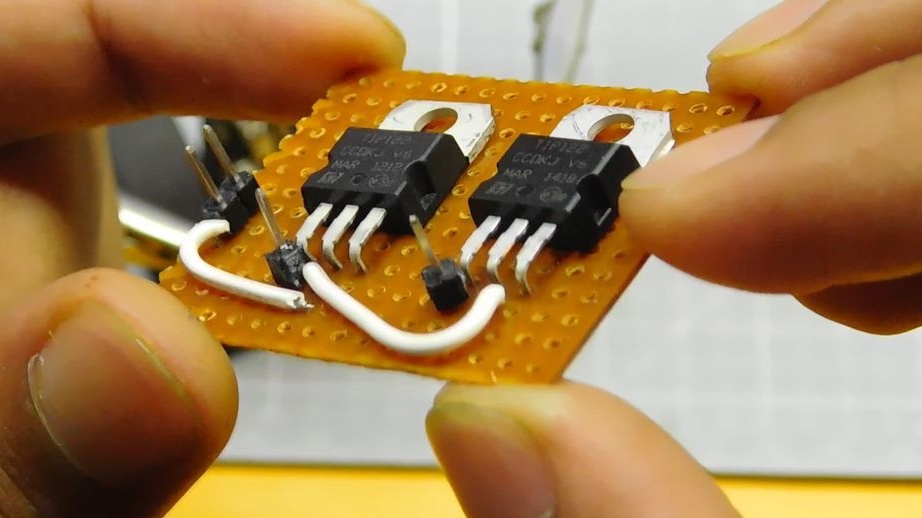
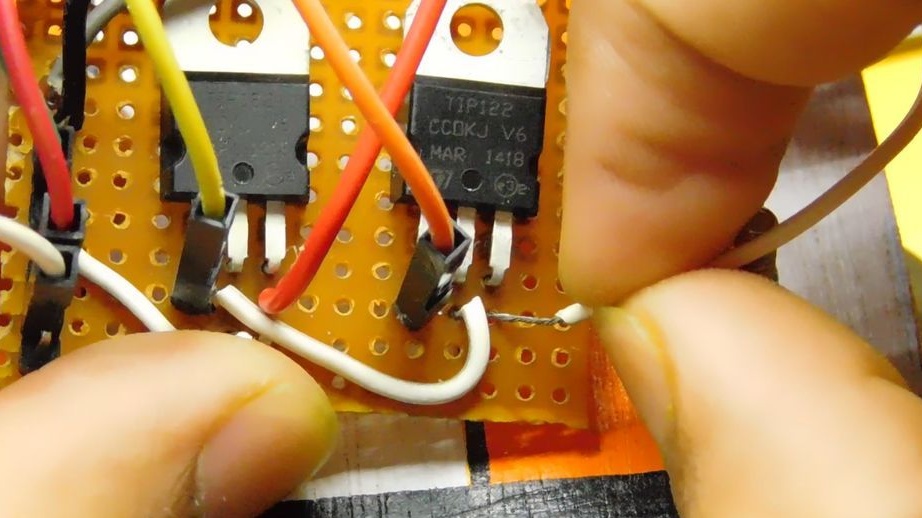
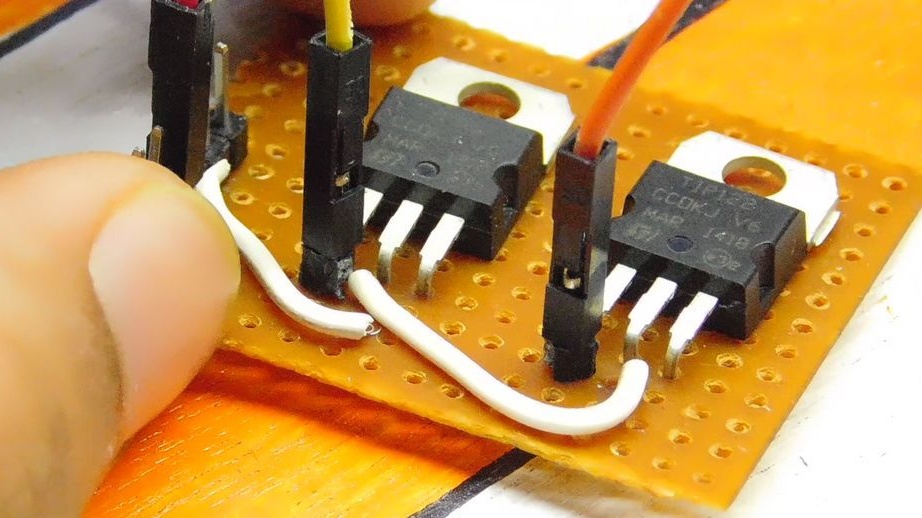
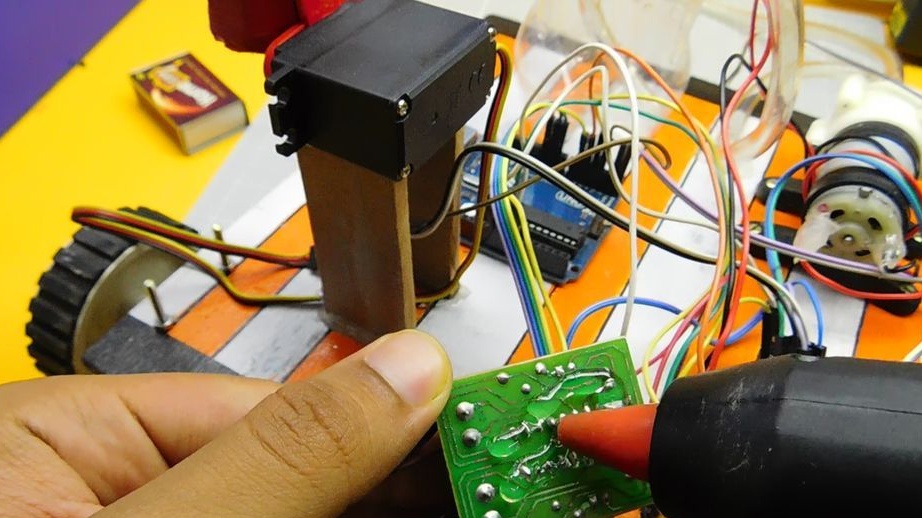
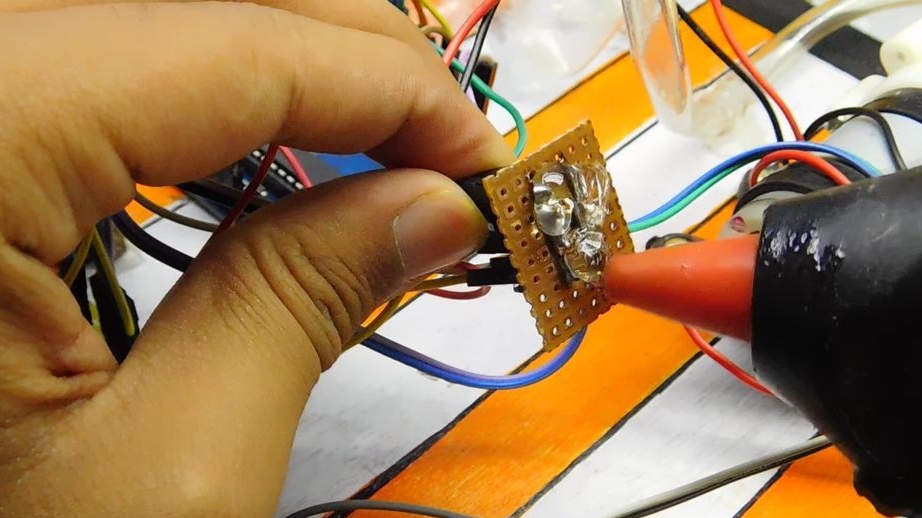
Schritt vier: Transistor
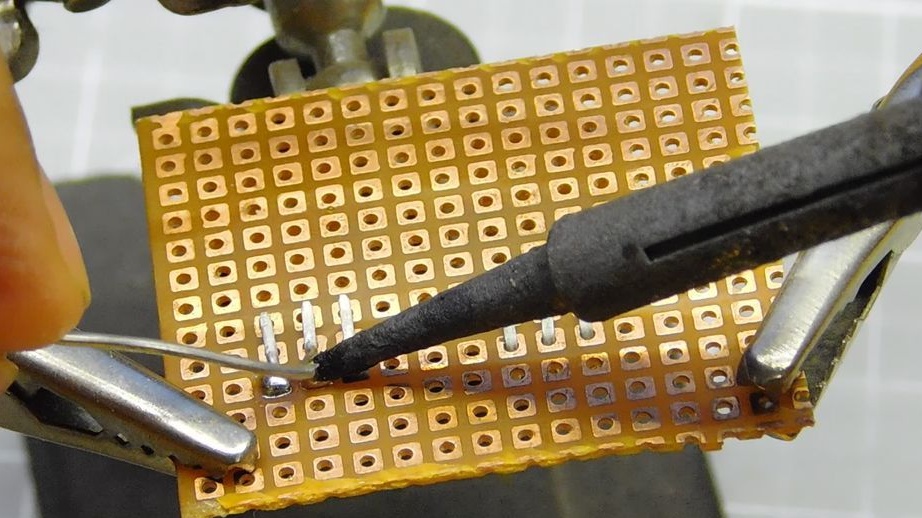
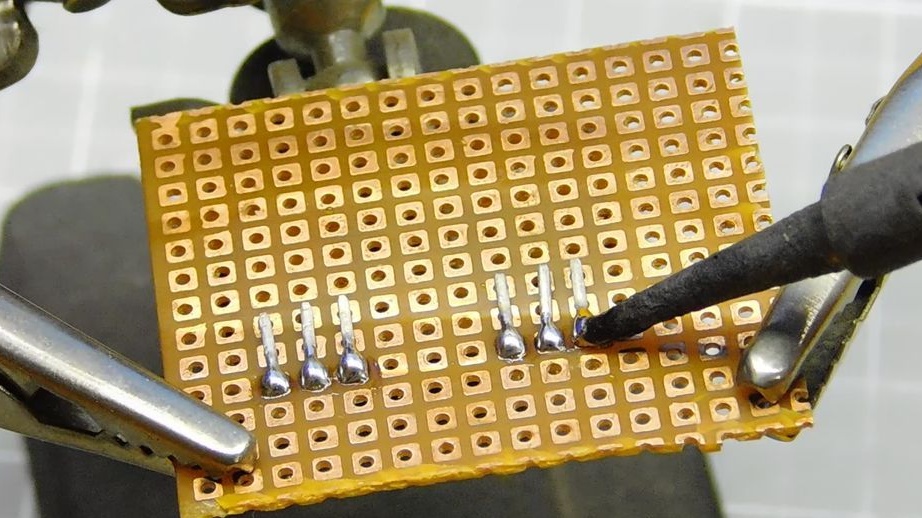
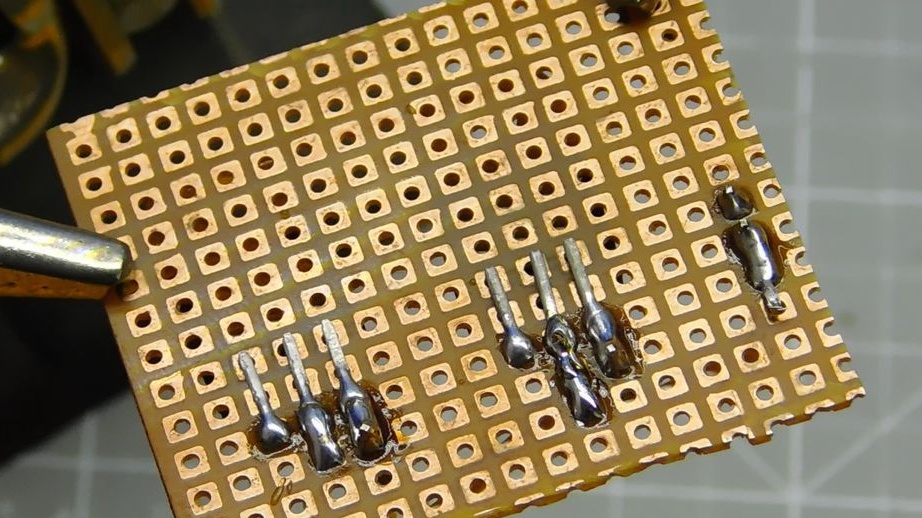
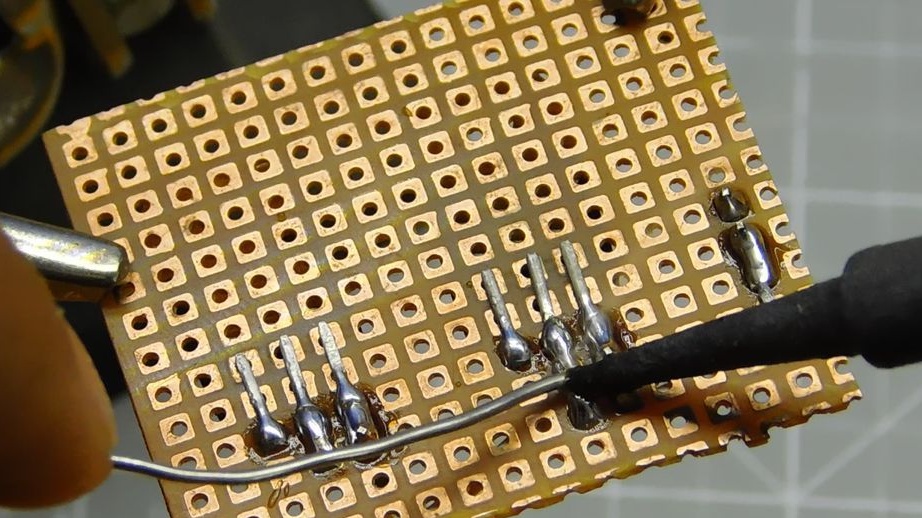
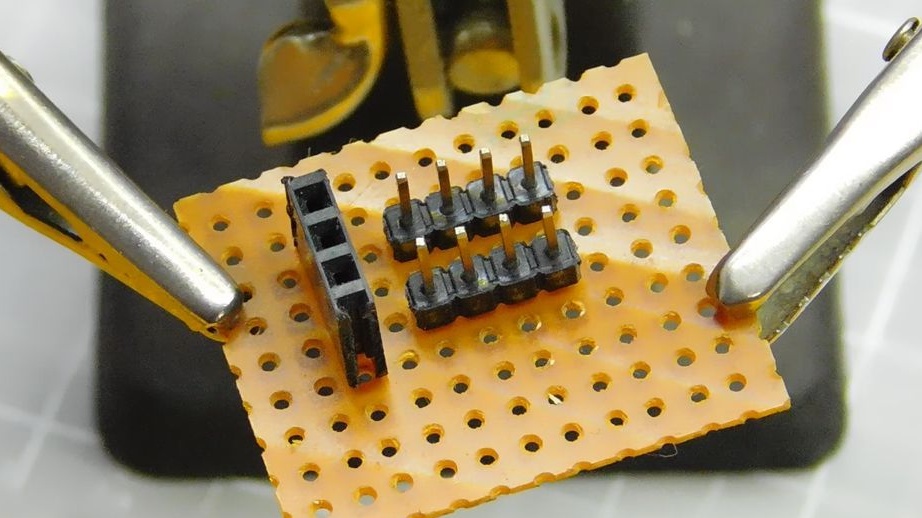
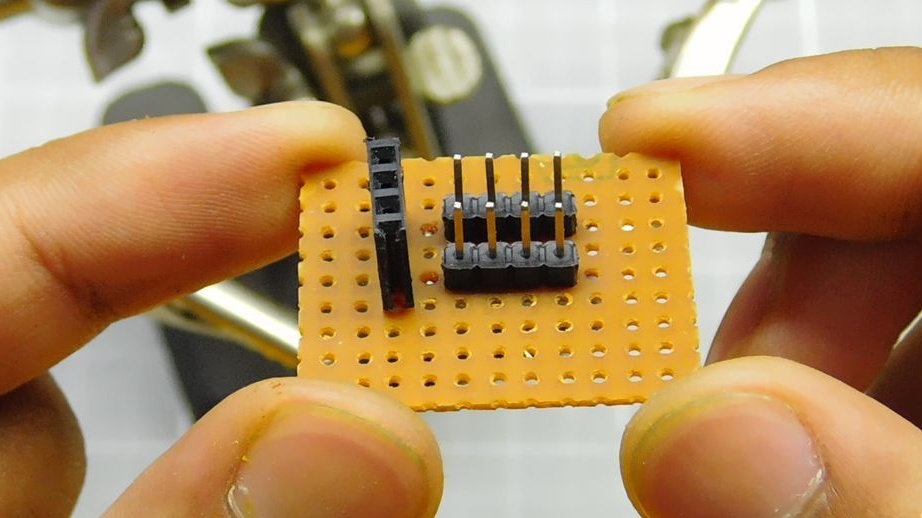
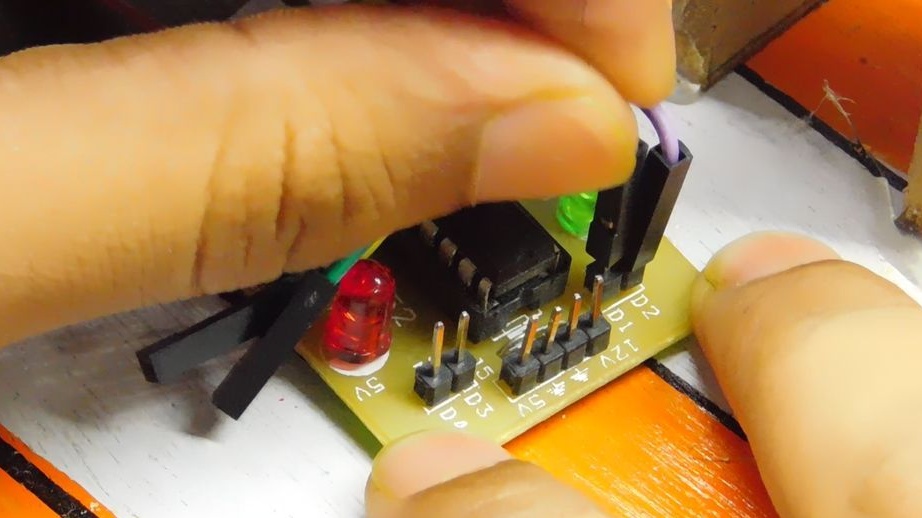
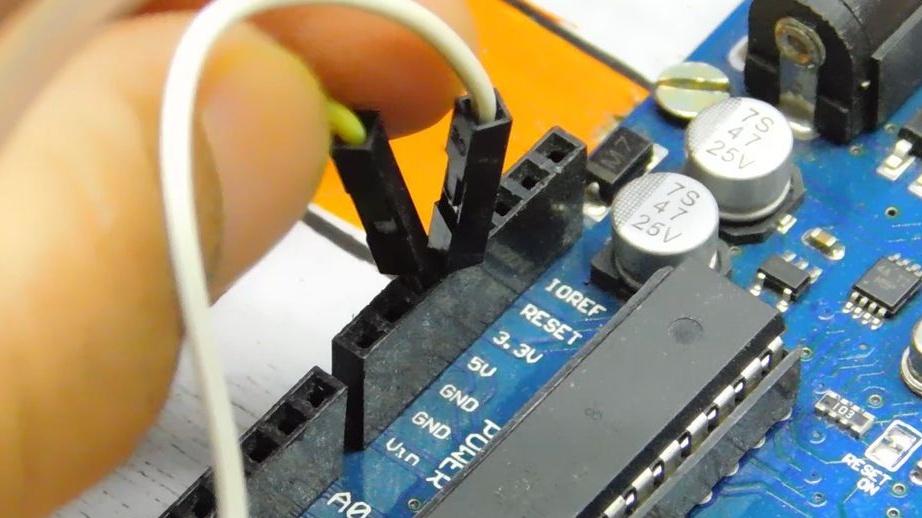
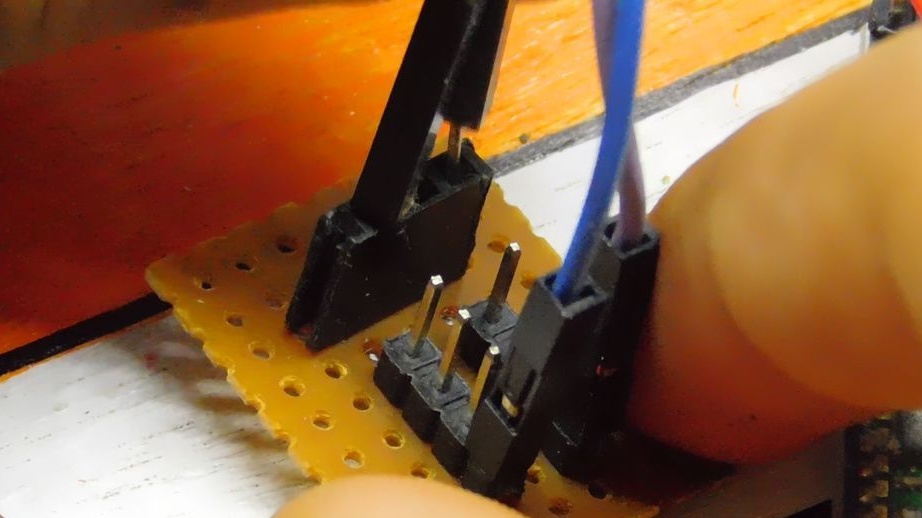
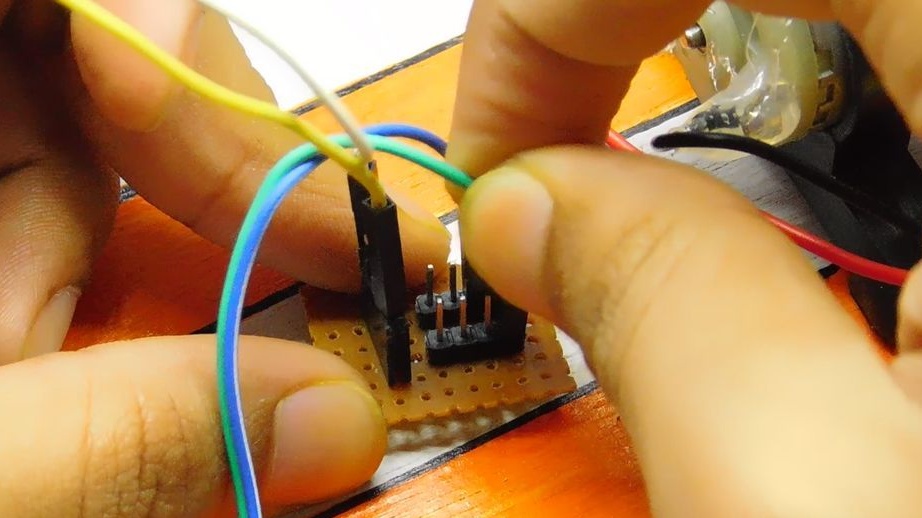
Für eine Wasserpumpe und Motoren werden 12 V benötigt. Da Arduino jedoch nur 5 V abgibt, sammelt der Master die Schaltung am TIP122-Transistor.Außerdem fügt der Assistent der Platine mehrere + 5V- und Gnd-Pins hinzu.
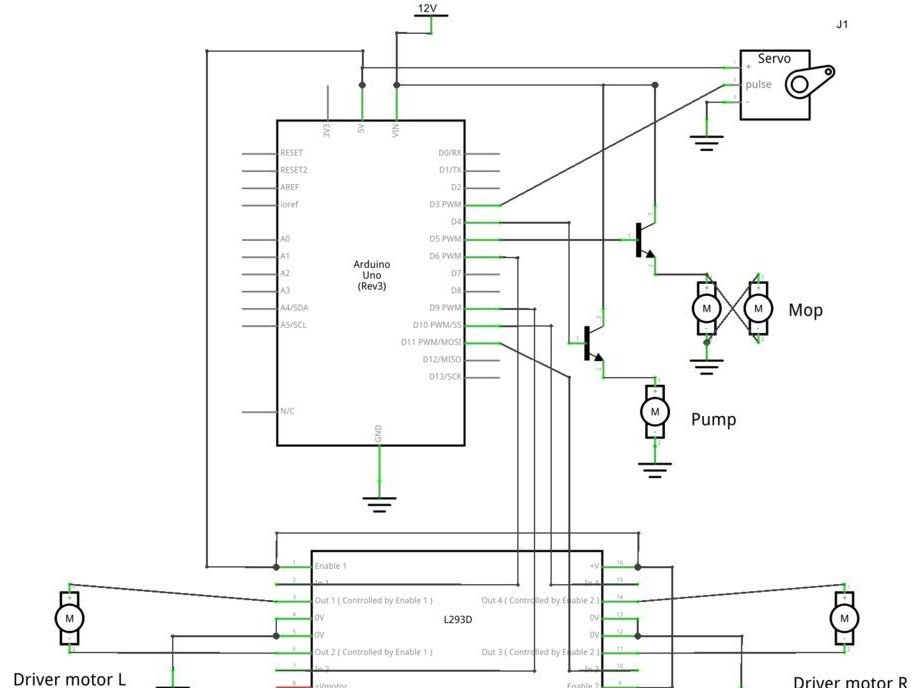
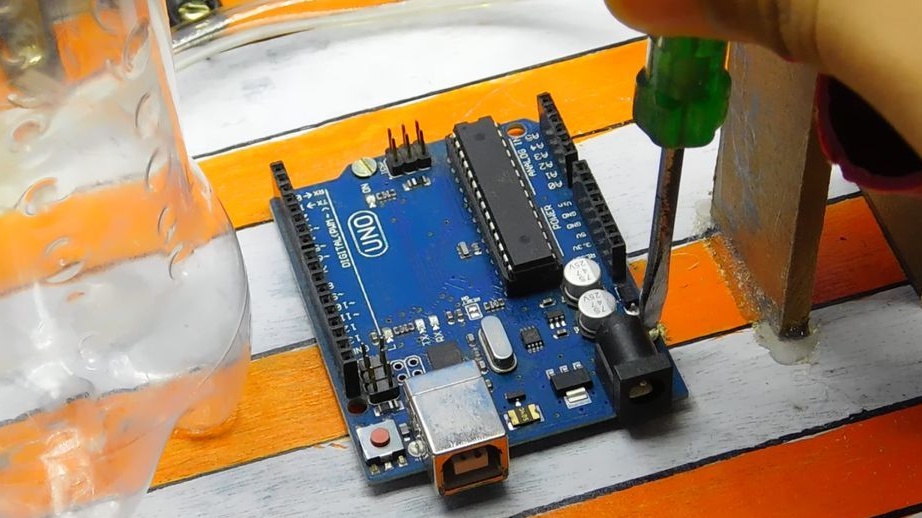
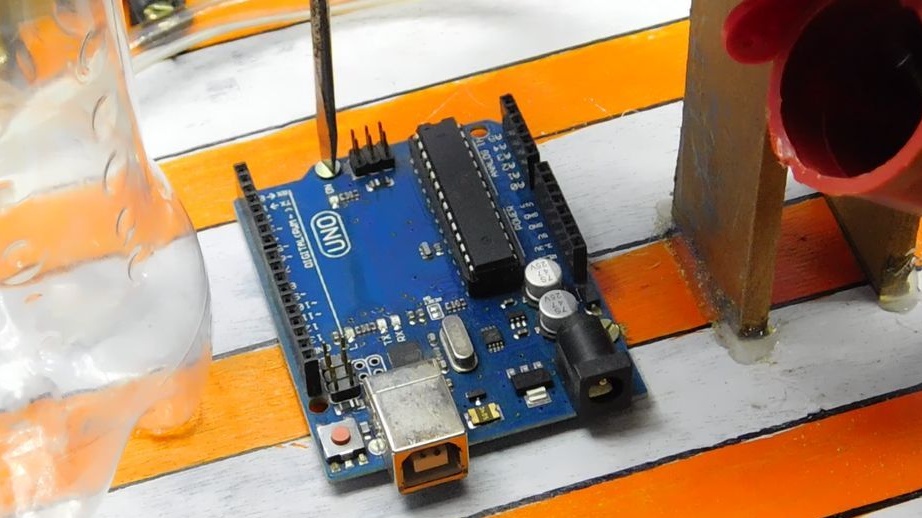
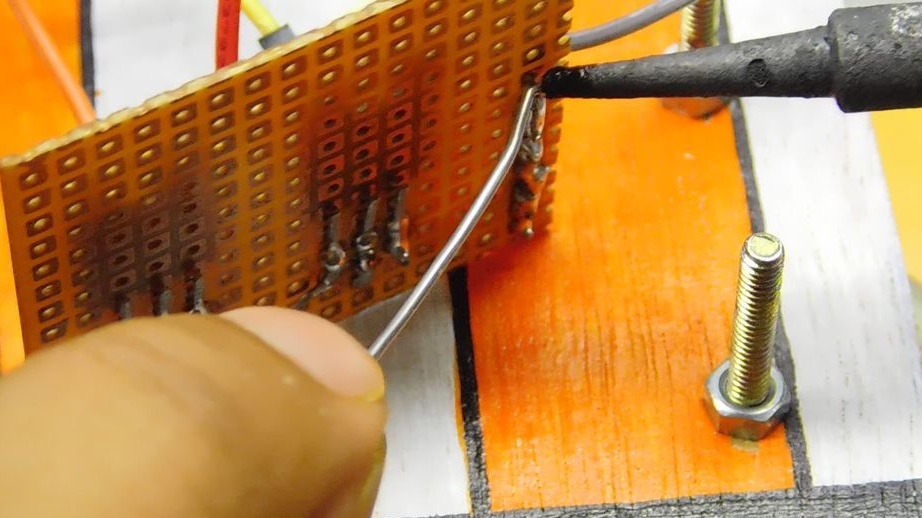
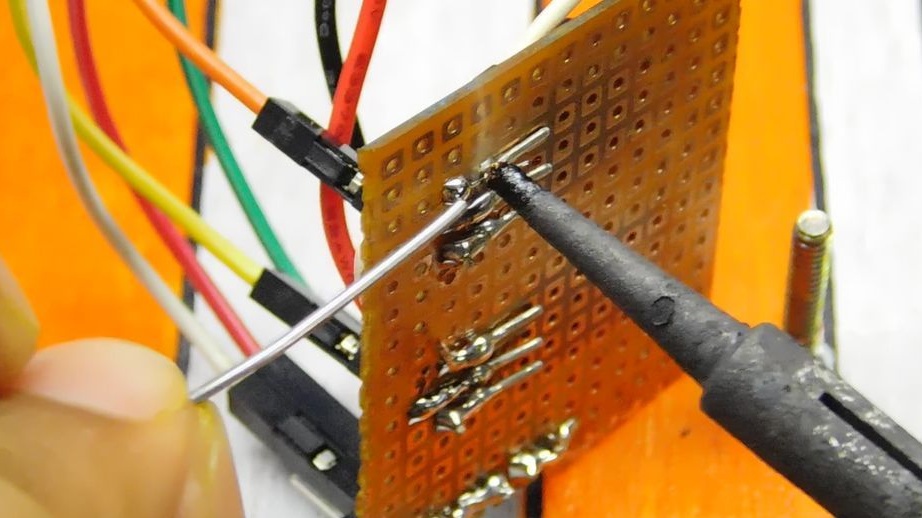
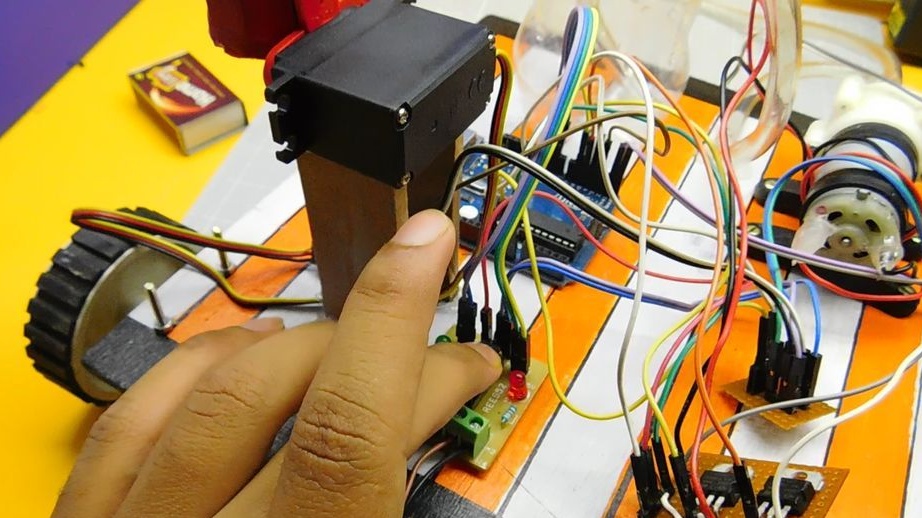
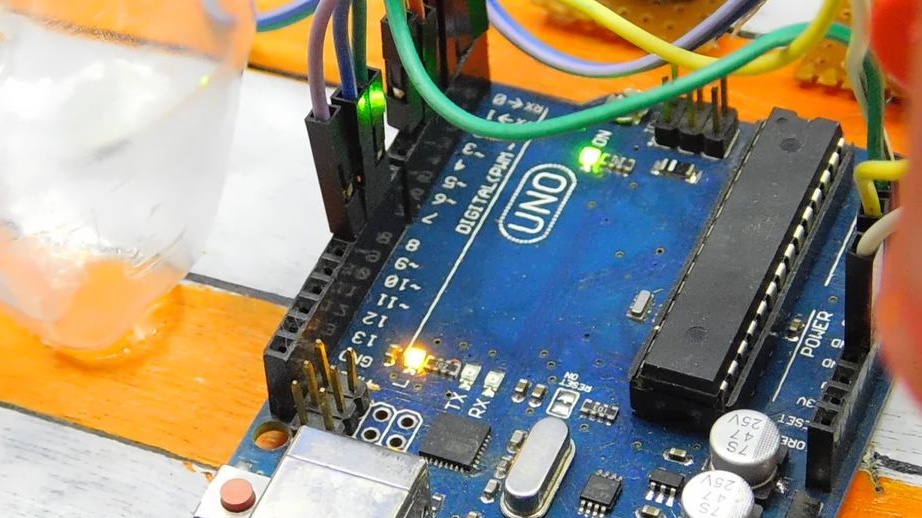
Fünfter Schritt: Installieren der Arduino-Schaltung
Sichert Arduino an der Plattform und verbindet elektrische Geräte mit der Platine.
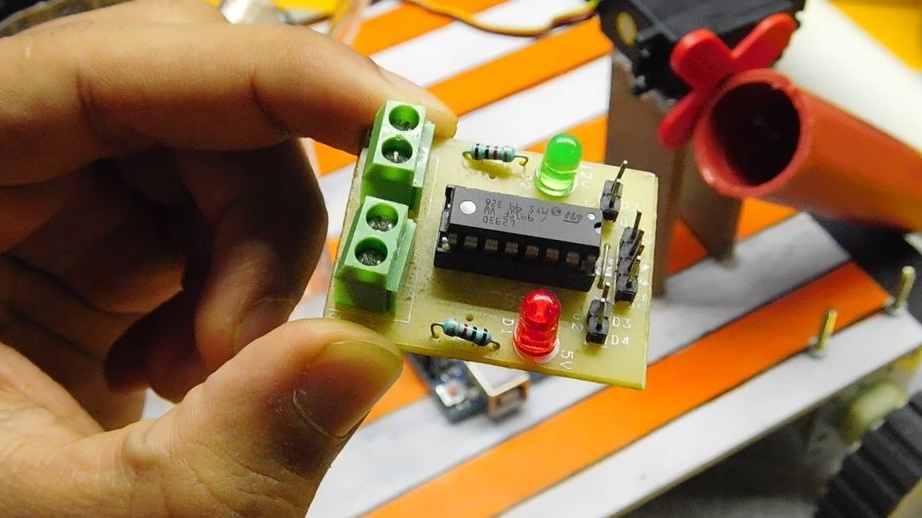
Motorsteuergerät.
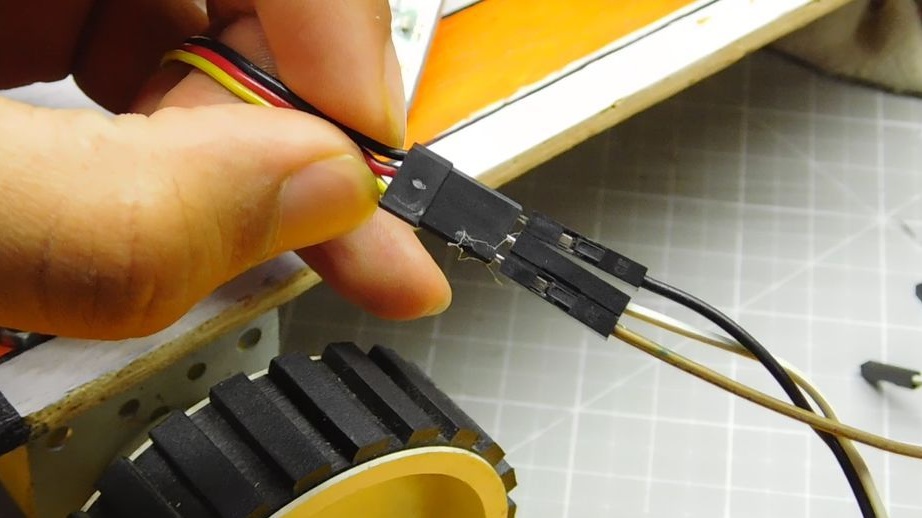
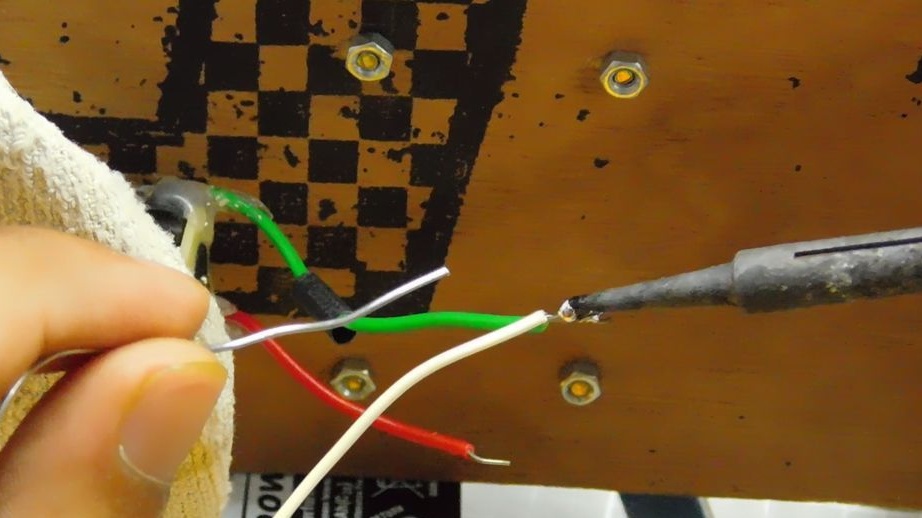
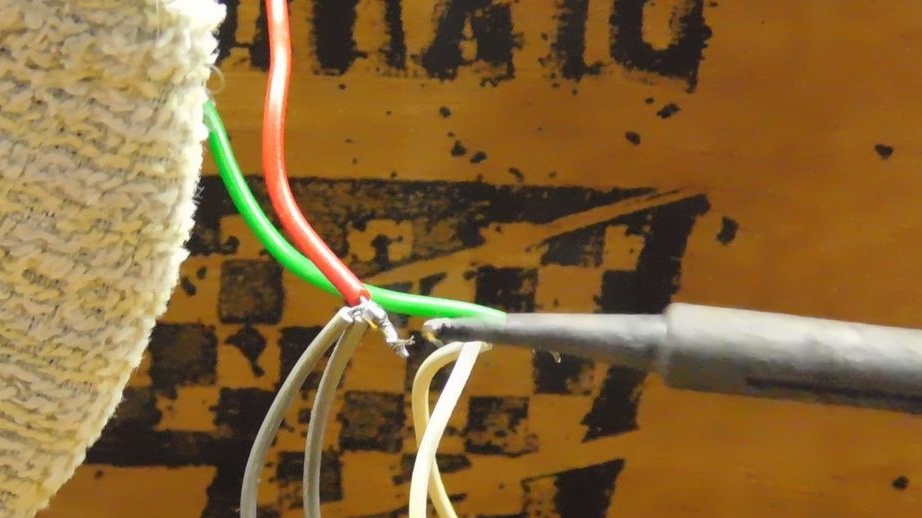
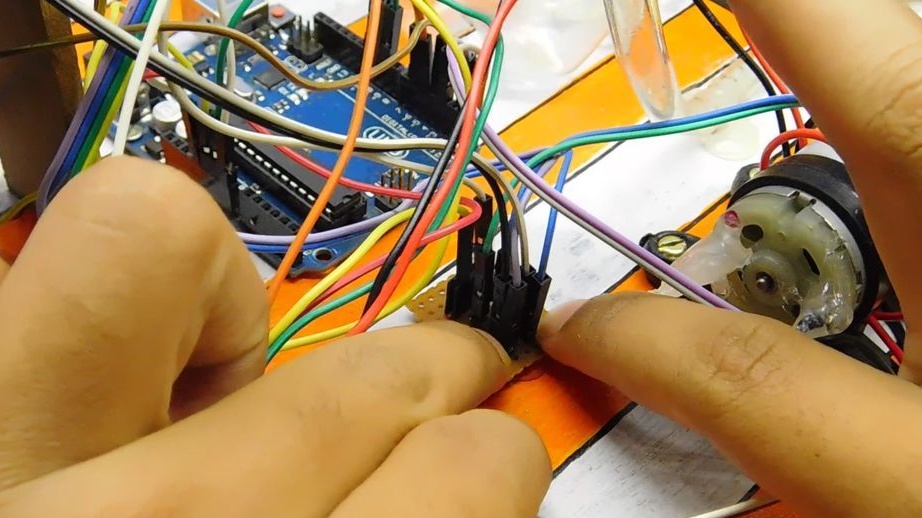
Es verlötet die Drähte der Motoren (an denen die Räder für die Bewegung befestigt sind, nicht die Bürsten). Befestigt die Drähte in den Modulhalterungen. Verbinden Sie das Modul anschließend wie folgt mit Arduino.
Modul ::: Arduino
1 - D6
2 - D9
3 - D10
4 - D11
+ 5V - + 5V
Gnd-gnd
Das + 12V-Modul wird an die Batterie angeschlossen.
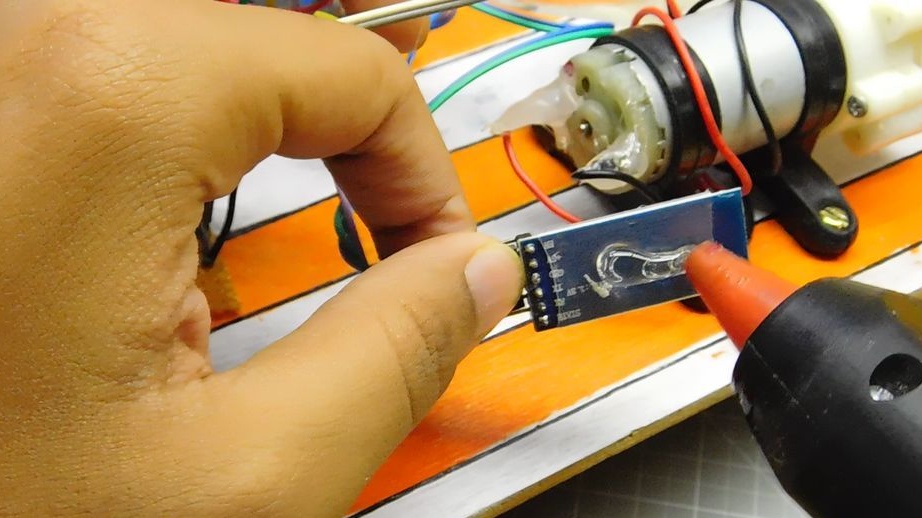
Bluetooth-Verbindung.
Bluetooth ::: Arduino
Vcc - + 5V
Gnd - gnd
Rx - Tx
Tx - Rx
Servomotor ::: Arduino
Vcc - + 5V
Gnd - gnd
Signal - D3
Dann werden die Pumpen- und Bürstenmotoren gemäß dem Schema verbunden. Bürstenmotoren sind parallel geschaltet und drehen sich in verschiedene Richtungen, rechts im Uhrzeigersinn und links gegen den Uhrzeigersinn.

Schritt 6: Befestigungselemente für Roboterteile
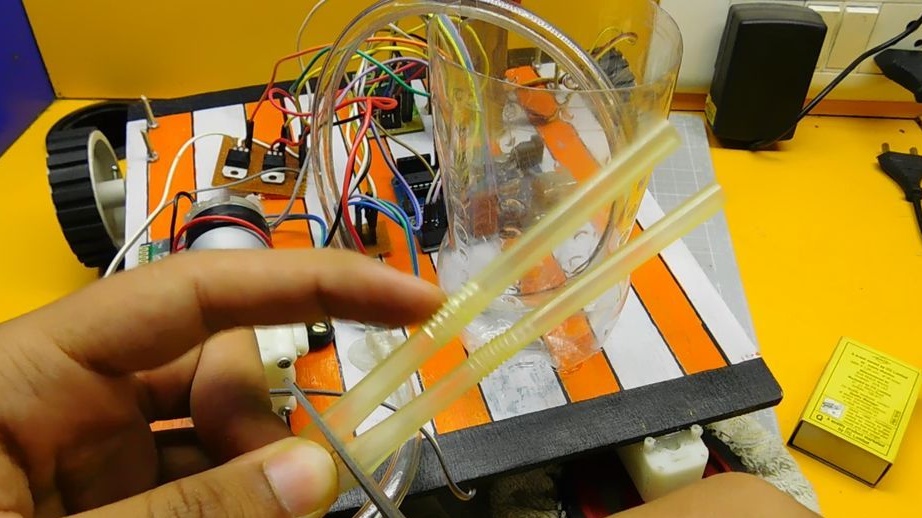
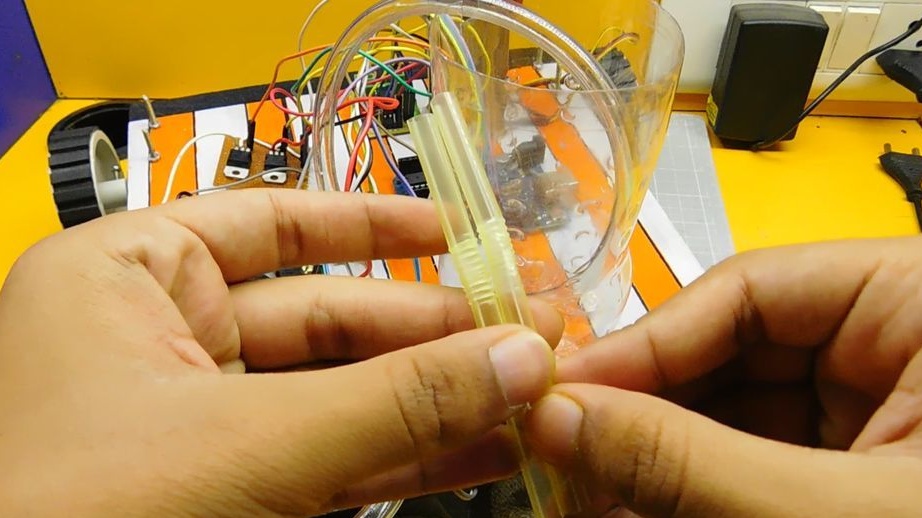
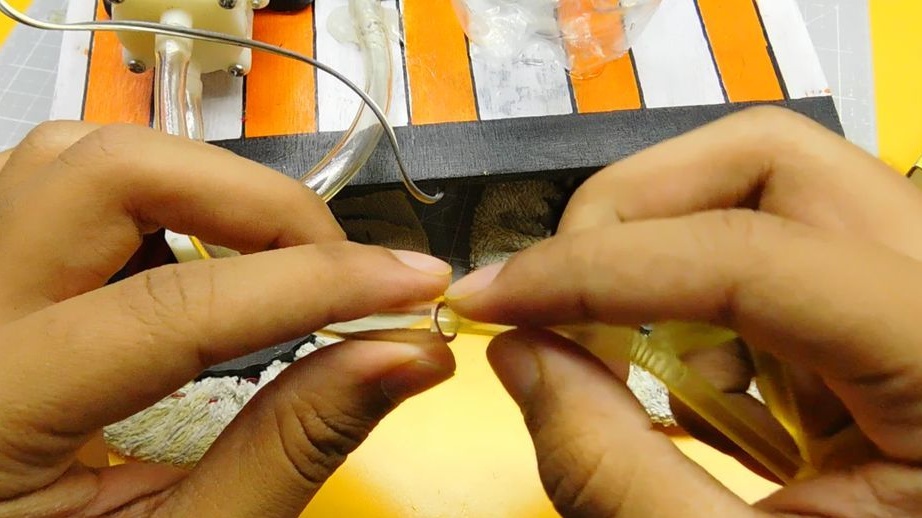
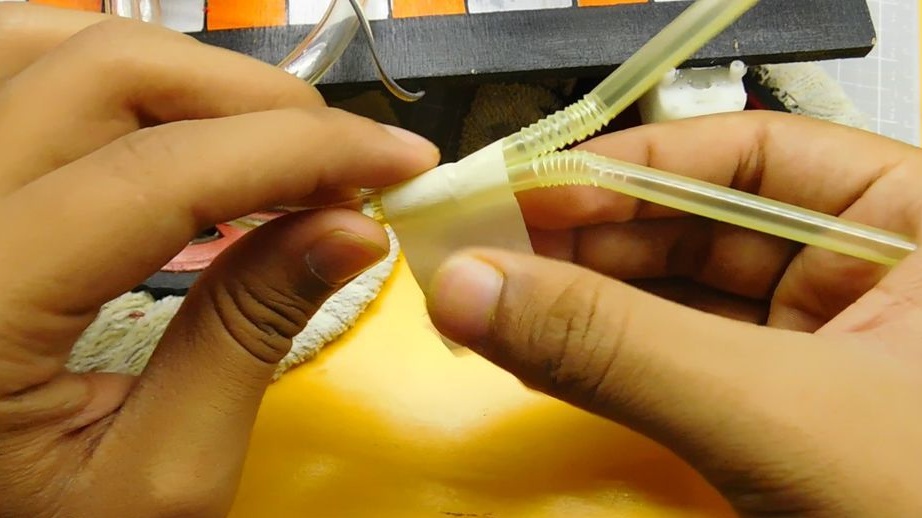
Schneidet zwei Cocktailstrohhalme von jeweils ca. 7 cm in Scheiben. Führt die Strohhalme in die Wasserzuleitung ein. Befestigt Strohhalme vor Bürsten.




Schlösser auf der Plattform elektronisch Komponenten.

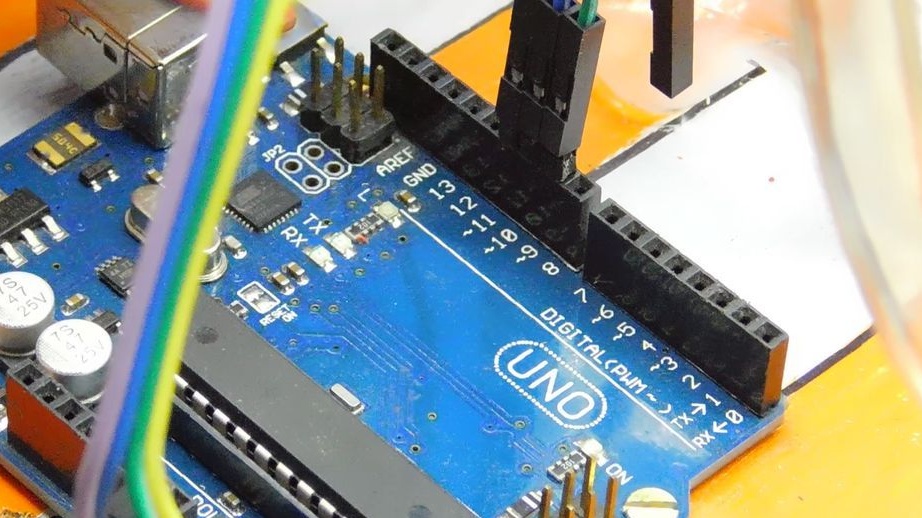
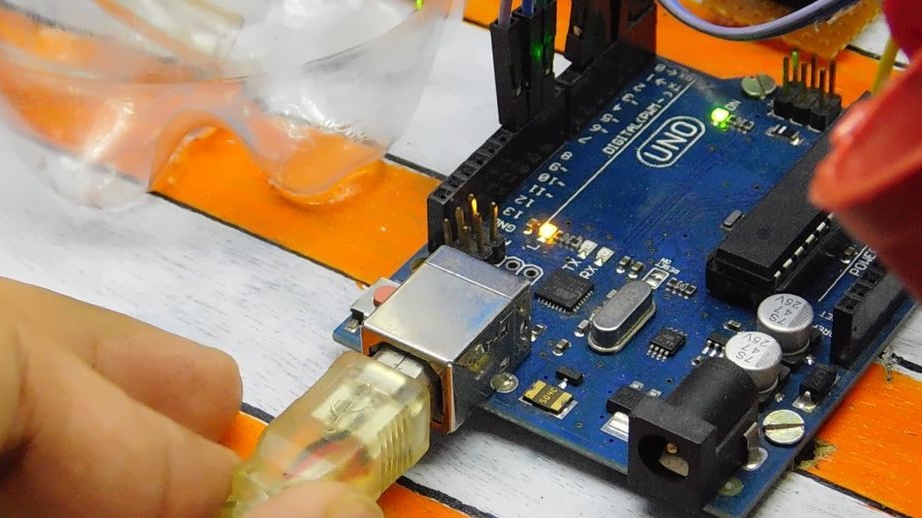
Schritt sieben: Laden Sie den Code herunter
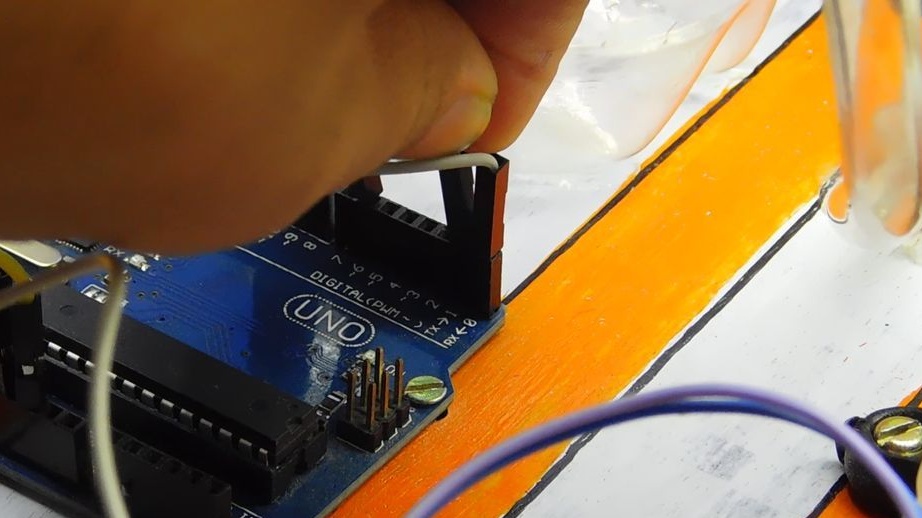
Entfernt die Rx- und Tx-Jumper vom Arduino-Board. Verbindet die Karte mit einem Computer. Lädt den Code. Setzt die Jumper ein. .
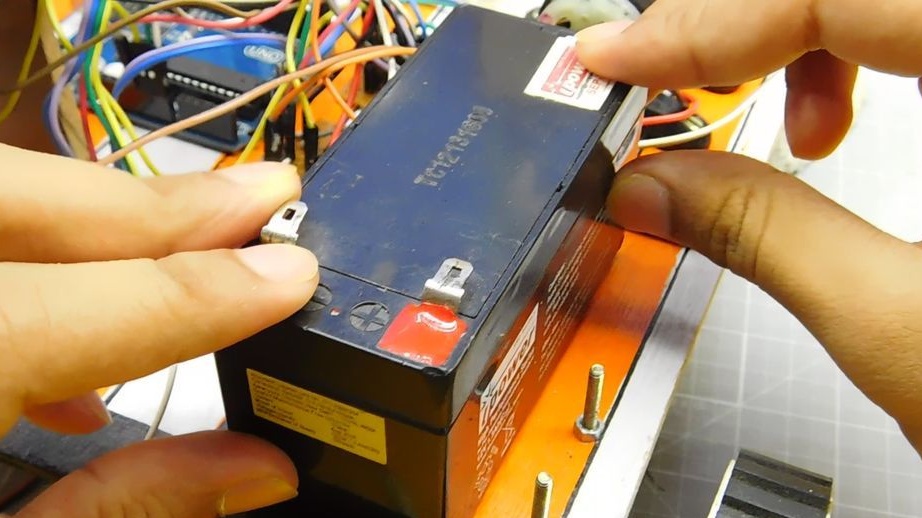
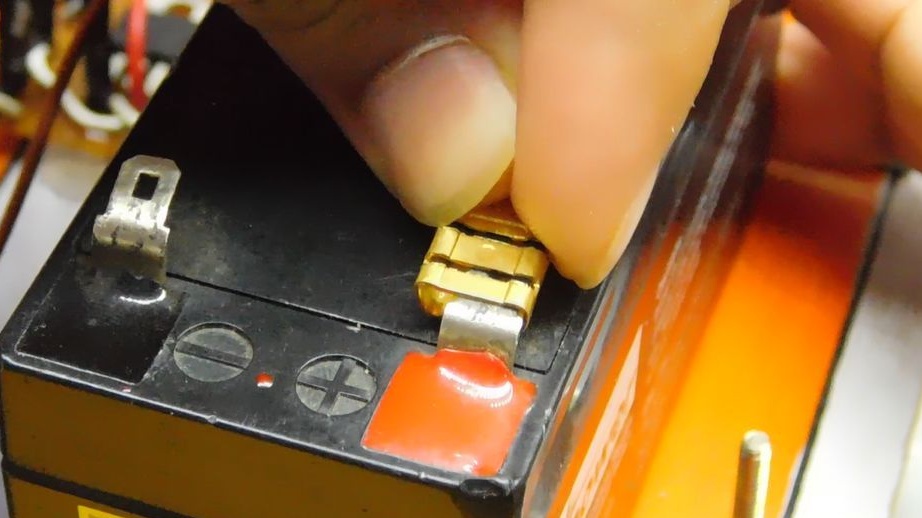
Schritt acht: Batterie
Sichert den Akku auf der Plattform mit doppelseitigem Klebeband. Verbindet elektronische Geräte mit der Batterie. Der Arduino-Master empfiehlt, die Verbindung über einen Spannungsteiler herzustellen. Sie können der Schaltung auch einen Schalter hinzufügen.

Schritt neun: Steuern Sie den Roboter
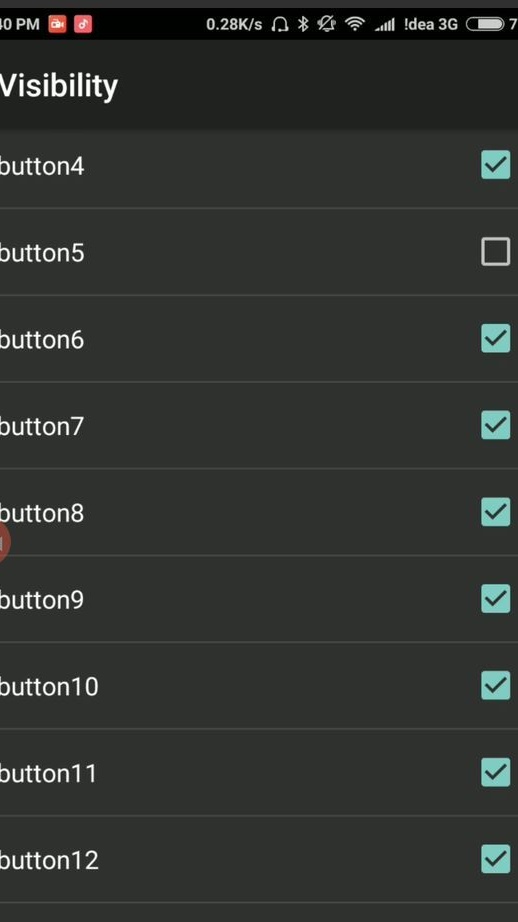
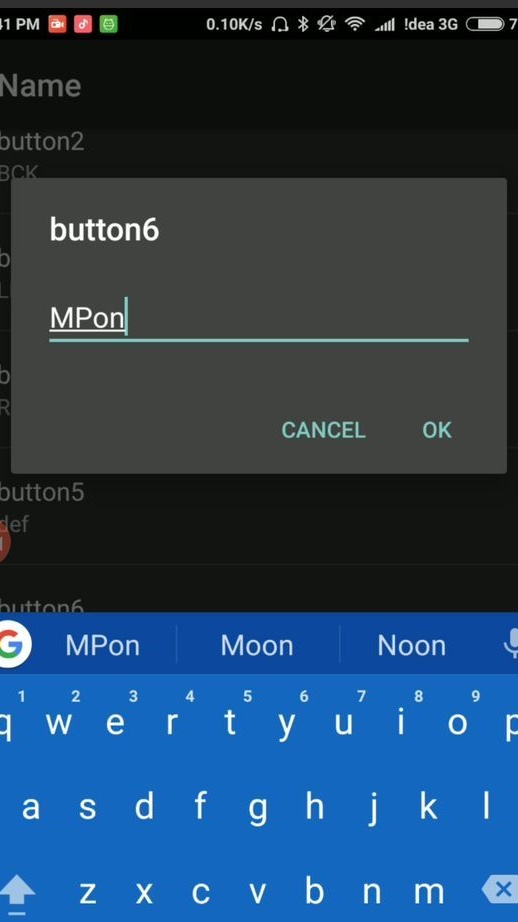
Von Google Play lädt der Assistent die Anwendung "Bluetooth Serial Controller" herunter. Öffnet die Anwendung. Geht zu Einstellungen> Sichtbarkeit. Deaktiviert die Schaltflächen 5, 9, 12. Wechselt zu den Namen. Weist jeder Schaltfläche eine Schaltfläche mit 2-3 Buchstaben zu. Siehe Foto unten.
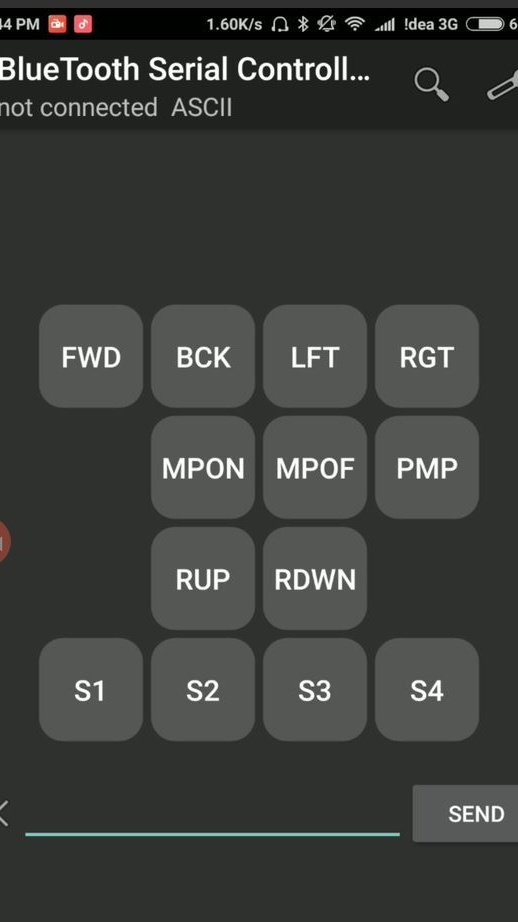
Dann installiert jede Schaltfläche einen Befehl (Anführungszeichen müssen entfernt werden, Groß- und Kleinschreibung nicht ändern):
Taste 1 (FWD): 'F'
Taste 2 (BCK): 'B'
Taste 3 (LFT): 'L'
Taste 4 (RGT): 'R'
Taste 6 (MPON): 'M'
Taste 7 (MPOF): 'm'
Taste 8 (PMP): 'P'
Taste 10 (RUP): 'U'
Taste 11 (RDWN): 'u'
Taste 13 (S1): '1'
Taste 14 (S2): '2'
Taste 15 (S3): '3'
Taste 16 (S4): '4'
Weist unter Stoppbefehle> Befehle Befehle nur diesen Schaltflächen zu:
Taste 1: 'S'
Taste 2: 'S'
Taste 3: 'S'
Taste 4: 'S'
Taste 8: 'p'

Jetzt müssen Sie noch eine Verbindung zum Bluetooth-Modul („HC-05“) herstellen, das Passwort eingeben (1234 oder 0000) und versuchen, den Raum zu reinigen -)))
Vielen Dank an den Master-Master, und wir möchten, dass er den Roboter verbessert und von ihm völlig autonom arbeitet.
Der gesamte Montageprozess des Roboterreinigers ist im Video zu sehen.