

Kürzlich habe ich die Herstellung eines universellen Kettenfahrwerks beschrieben. Heute möchte ich mehr über das Anschließen eines Bluetooth-Moduls an unser Gehäuse sprechen. Und hier er selbst:

Um dies umzusetzen hausgemacht müssen ein Chassis machen. Detaillierte Herstellung, die beschrieben wird hier
Darüber hinaus benötigen Sie Folgendes:
- Bluetooth-Modul HC-XX (oder seine Klone)
- Android-Handy
- Verbindungsdrähte "Mutter - Mutter"
Schritt 1 Modulauswahl.
Es gibt viele Bluetooth-Module. Und jeder hat unterschiedliche Eigenschaften. Kurz gesagt, die Liste sieht folgendermaßen aus:
- HC-03, HC-04 (HC-04-M, HC-04-S) auf dem BC417143-Chip - für industrielle Anwendungen;
- HC-05, HC-06 (HC-06-M, HC-06-S) auf dem BC417143-Chip - zur kommerziellen Verwendung;
- HC-05-D, HC-06-D (mit einer Debug-Karte zur Bewertung und zum Testen);
- HC-07 - ein Modul mit einem CSR 41C6-Chip, das den HC-06 ersetzen soll (voll kompatibel damit);
- HC-08 - Modul mit extrem geringem Stromverbrauch und Bluetooth 4.0-Protokoll;
- HC-09 ist das neueste Modul, das HC-06 und HC-07 ersetzt.
Kurze Eigenschaften der Module:
- Bluetooth-Chip - BC417143 hergestellt von
- Kommunikationsprotokoll - Bluetooth-Spezifikation v2.0 + EDR;
- Aktionsradius - bis zu 10 Meter (Leistungsstufe 2);
- Kompatibel mit allen Bluetooth-Adaptern, die SPP unterstützen;
- Die Größe des Flash-Speichers (zum Speichern von Firmware und Einstellungen) - 8 Mbit;
- die Frequenz des Funksignals - 2,40 .. 2,48 GHz;
- Host-Schnittstelle - USB 1.1 / 2.0 oder UART;
- Stromverbrauch - Der Strom während der Kommunikation beträgt 30-40 mA. Der durchschnittliche Stromwert beträgt ca. 25 mA. Nachdem die Verbindung hergestellt wurde, beträgt die Stromaufnahme 8 mA. Es gibt keinen Ruhemodus.
Die derzeit günstigsten Bluetooth-Module sind der HC-05 und der HC-06. Sie sind in chinesischen Online-Shops reichlich vorhanden. Die Unterschiede zwischen ihnen bestehen darin, dass der erste sowohl im Master-Modus (Slave) als auch im Slave-Modus (Master) arbeiten kann. Das zweite ist ein reines Slave-Gerät. Mit anderen Worten, HC-06 kann ein gekoppeltes Gerät nicht erkennen und eine Verbindung damit herstellen, sondern nur dem Master gehorchen.
Normalerweise werden Module als zwei miteinander verlötete Platinen verkauft. Das kleinere ist ein Fabrikmodul, das in verschiedenen Bereichen weit verbreitet ist elektronisch Geräte. Groß - ein spezielles Steckbrett für Heimwerker. Es sieht aus wie ein kleineres Board mit einem BC417-Chip:

Und so die DIY-Module HC-05 und HC-06 selbst:

Grundsätzlich können Sie jedes beliebige Modul verwenden. Ein Modul ohne Steckbrett kostet weniger, aber dann müssen Sie sich um die 3,3-V-Stromversorgung des Moduls kümmern und sich selbst quälen, indem Sie Drähte an das Modul anlöten, da die Klemmen sehr nahe beieinander liegen. Ich habe meiner Meinung nach das Optimum im Preis-Leistungs-Verhältnis HC-06 gewählt.

Schritt 2 Verbindung.
Wir verbinden uns wie folgt:
Arduino Nano Bluetooth
D7 - RX
D8 - TX
5 V - VCC
GND - GND
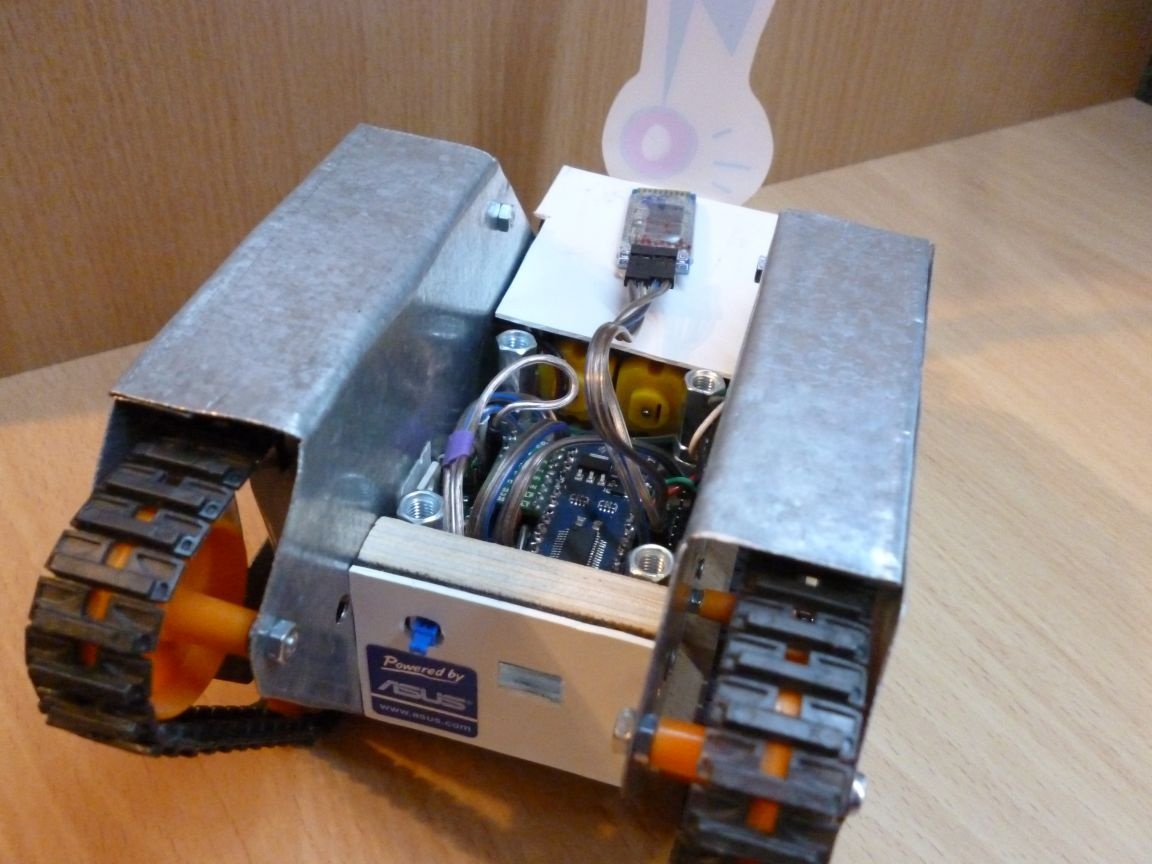
Kleben Sie das Modul zur Vereinfachung auf ein doppelseitiges Klebeband im Gehäuse:
Schritt 3 Moduleinrichtung.
Für einen ordnungsgemäßen Betrieb muss das Modul konfiguriert sein. Wir werden AT-Befehle konfigurieren, die in das Terminalfenster eingegeben werden. Ich gebe ein Beispiel für die Einrichtung des HC-06-Moduls. Wenn Sie eine andere haben, können die Einstellungen abweichen. Damit unser Modul Befehle empfängt, flashen wir zuerst das Arduino mit der folgenden Firmware:
In diesem Fall fungiert Arduino als Brücke zwischen Computern und dem Modul. In der Firmware verwende ich die SoftwareSerial-Bibliothek. Bei hohen Geschwindigkeiten funktioniert es instabil. Wenn Sie eine hohe Geschwindigkeit wünschen, können Sie das Modul direkt an die Arduino RX- und TX-Kontakte anschließen und die Firmware neu schreiben. In meinem Fall werden wir jedoch mit einer Geschwindigkeit von 9600 mit dem Modul arbeiten. Meiner Meinung nach ist dies ausreichend. Öffnen Sie nach der Firmware das Terminal und geben Sie Folgendes ein:
"AT" (ohne Anführungszeichen) sollte die Antwort "OK" kommen (dies bedeutet, dass alles richtig angeschlossen ist und das Modul funktioniert).
"AT + BAUD96000" (ohne Anführungszeichen) sollte die Antwort "OK9600" kommen.
Wenn Sie die richtige Antwort haben, fahren Sie mit dem nächsten Schritt fort.
Schritt 4 Firmware.
Um die Firmware und die Firmware selbst zu schreiben, verwende ich die Arduino IDE. Die aktuelle Version für heute ist 1.8. Ich poste mehrere Firmware-Optionen:
BT_RobotControl - für die Robotersteuerung unter Android
BT_WASD - zur Steuerung von einem Computer aus, Senden von Befehlen über das Terminal.
Schritt 5 Richten Sie Ihr Telefon ein.
Auf einem Android-Telefon müssen Sie ein Programm installieren, um den Roboter über Bluetooth zu steuern. Es gibt viele von ihnen. Sie können "Bluetooth Arduino" in Google Play eingeben und nach Ihrem Geschmack auswählen. Ich mochte den BT Controller. Laden Sie es herunter und installieren Sie es auf Ihrem Android-Telefon oder -Tablet. Als nächstes müssen Sie über die Android-Einstellungen eine Verbindung mit unserem Modul herstellen. Das Passwort für die Verbindung lautet "1234" oder "0000".
Schritt 6 Computer-Setup. (falls erforderlich)
Bei Bedarf oder einfach nur zur Steuerung können Sie einen Computer oder Laptop verwenden. Dazu muss der Computer über Bluetooth verfügen. Wir stellen die Kommunikation mit unserem Modul über die Steuerungen am Computer her. Als nächstes benötigen wir ein Terminal, um Befehle zu senden. Beliebig für Sie. Nach dem Schreiben der BT_WASD-Firmware erfolgt die Steuerung über die folgenden Schaltflächen (Befehle):
w vorwärts
e - links und vorwärts
q - rechts und vorwärts
s - zurück
z - zurück und links
x - zurück und rechts
a - an Ort und Stelle belassen
d - genau richtig
f - hör auf
Die ständige Eingabe von Befehlen ist unpraktisch, daher empfehle ich, das Programm zum Senden von Befehlen zu verwenden. Ich benutze Z-Controller. Wählen Sie im Programm den Port (COM-Port, über den die Verbindung hergestellt wird) und konfigurieren Sie die Schlüssel für die Befehle. Richtig und intuitiv einrichten.
Ich hoffe es war interessant und nützlich.
