

Im Video können Sie sehen, wie der Roboter funktioniert. Während des Betriebs ändert sich allmählich die Farbe.

Materialien und Werkzeuge zur Montage des Roboters:
- U-förmige Montagehalterungen;
- jeweils vier 1,5-V-LR44-Batterien;
- mehrfarbige RGB-LED mit Schaltfunktion;
- Isolierrohre;
- Stahlstift;
- Niederspannungsmotortyp RF-300CA;
- Taste zum Einschalten des Roboters (mit zwei Kabeln);
- Kabel zum Anschließen des Motors;
- blinkende Alarm-LED.
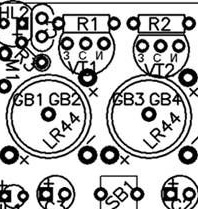

In Bezug auf das Notwendige elektronisch Elemente sind sie in der Abbildung dargestellt. Die Leiterplatte besteht aus einer Folie aus Leiterplatte, ihre Abmessungen betragen nur 30X30 mm. Der Autor empfiehlt auch die Verwendung kleiner Polarkondensatoren für die Montage.
Roboterherstellungsprozess
Erster Schritt. Schematische Darstellung des Roboters
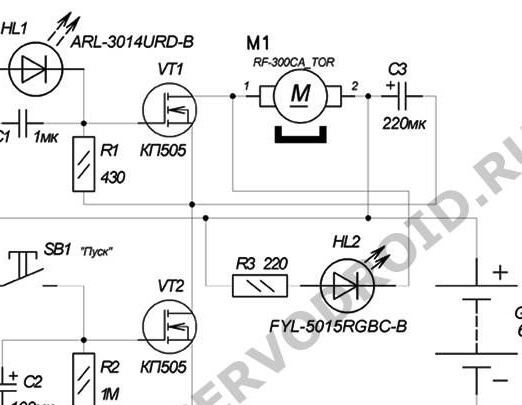
Die Roboterschaltung ist in der Abbildung zu sehen. Nach dem Einlegen der Batterie befindet sich der Roboter im ausgeschalteten Zustand. Um ihn einzuschalten, drücken Sie die Taste SB1. Unmittelbar danach wird der Kondensator C2 sofort aufgeladen. Die positive Platte vom Kondensator ist mit dem Gate des Feldeffekttransistors VT2 verbunden. In dieser Hinsicht nimmt der Widerstand des Drain-Source-Kanals dieses Kanals sofort ab, wenn die Schaltschwelle erreicht ist, und es bildet sich eine negative potentielle Ladung am Drain. Nun, was als nächstes passiert, ist im Diagramm detaillierter zu sehen.
Schritt zwei RGB-LED montieren
Die LED unter der Nummer 1 ist auf der Leiterplatte montiert. In der Zeichnung wird diese Position als HL2 bezeichnet. Nach der Installation der LED müssen die Schlussfolgerungen so gebogen werden, dass die LED zur Seite gerichtet ist. Während des Betriebs leuchtet die LED also nicht nach oben, sondern zur Seite und beleuchtet die Wände. In welche Richtung das Licht scheint, wird durch einen schwarzen Pfeil angezeigt.

Schritt drei Batteriehalterungen montieren
Um den Kontakt zwischen der Batterie und dem Roboter herzustellen, werden Druckstifte verwendet.Eine Schaltfläche ist in der Mitte installiert, im Diagramm ist sie als GB1, GB2 markiert, und die zweite ist auf Position GB3, GB4 eingestellt. Um die Kontakte sicher zu fixieren, sind die Tasten mit viel Lötmittel verlötet.


Batterien sind auf dem Metallknopf unter der Nummer 3 installiert. Die Batterien sind mit einem U-förmigen Verschluss befestigt, an dem Isolatoren aus Rohren getragen werden. Der obere Teil der Halterung muss mit einem Lichtbogen nach unten leicht gebogen werden, damit die Batterien auf den unteren Kontakt gedrückt werden können. Isolierschläuche werden benötigt, damit die vertikalen Flächen der Batterien nicht mit den horizontalen in Kontakt kommen.
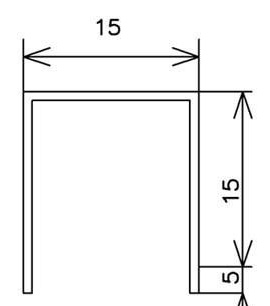
Um einen U-förmigen Verschluss herzustellen, müssen Sie zwei Büroklammern verwenden. Sie müssen in eine U-Form gebogen werden, wie in der Zeichnung angegeben. Es können beliebige Röhrchen verwendet werden, hier wird PVC verwendet. Ihre Höhe sollte der Höhe der Batterien entsprechen.
Installieren Sie die Halterung durch Löten. Dazu müssen Sie die Enden verzinnen. Zum Verzinnen ist ein neutrales, nicht waschbares Flussmittel erforderlich.
Schritt vier Den Motor einbauen
Der Motor ist an der Seite der Platine installiert, an der die Schienen verlaufen. Er befindet sich mit der Welle nach unten. Zum Befestigen des Motors können Sie Heißkleber oder doppelseitiges Klebeband verwenden. Bevor Sie den Motor jedoch fest montieren, müssen Sie ihn anschließen und das gesamte System auf Funktionsfähigkeit überprüfen.

Schritt fünf Einrichtung und Test hausgemacht
Nach dem Zusammenbau des Roboters können Sie testen und konfigurieren. Dazu müssen Sie Batterien in den Roboter einlegen. Sie werden anstelle von GB1, GB2 und GB3, GB4 installiert. In diesem Fall muss die Elektronik ausgeschaltet sein. Nach dem Einlegen der Batterien kann der Roboter eingeschaltet werden. Dies erfolgt über die Taste SB1. Nach dem Drücken sollte der Motor anlaufen, die HL1-LED blinkt und die RGB-LED leuchtet ebenfalls auf.
Nach einiger Zeit schaltet sich der Roboter automatisch aus, stoppt und alle Dioden gehen aus. Es wird dann auf die gleiche Weise wie beim ersten Mal durch Drücken einer Taste eingeschaltet.

Um die Zeit des Roboters anzupassen, müssen Sie mit den Werten des Widerstands R2 und des Kondensators C2 experimentieren. Sie sind für diese Funktion verantwortlich. Wenn Sie den maximalen Betrieb des Roboters einstellen müssen, sollte die Kapazität des Kondensators so groß wie möglich sein. Auf so einfache Weise können Sie einen so interessanten Roboter zusammenbauen.