Ein interessantes Merkmal dieses Roboters ist, dass er aufgrund der gepulsten Bewegung ziemlich sparsam Energie verbraucht.

Materialien und Werkzeuge für die Montage:
- eine Leiterplatte mit einer Dicke von 1-1,5 mm (Folie auf einer Seite);
- Lötkolben mit Lötmittel;
- Drähte;
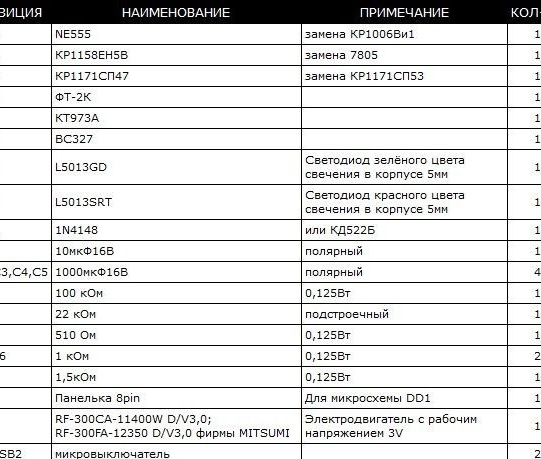
Alle Radioelemente sind in der Tabelle zu sehen.
Wie der Roboter funktioniert und was er kann
Unmittelbar nach dem Einschalten der Stromversorgung beginnt der Roboter zu arbeiten. Außerdem blinkt eine LED, die anzeigt, dass der Impulsgenerator ordnungsgemäß funktioniert. Der Roboter reagiert auf Licht, dies liegt daran, dass eine Fotozelle darauf installiert ist. Wenn Sie eine Taschenlampe auf einen Roboter richten, läuft dieser sehr schnell.
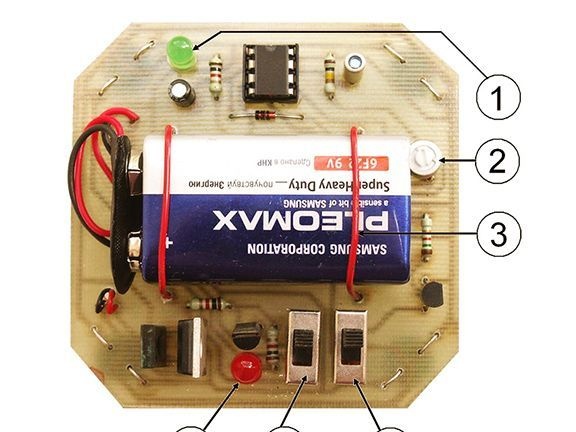
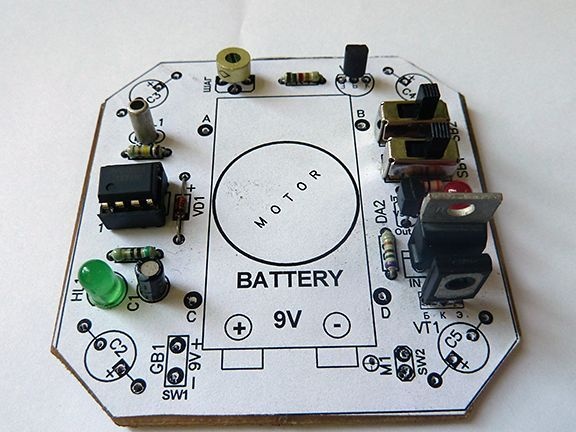
In der Abbildung geben die Zahlen die Elemente des Roboters an und ihre Funktionen werden beschrieben:
1. LED HL1. Es signalisiert den Betrieb des Impulsgebers.
2. Trimmer Widerstand R2, können sie die Impulsbreite einstellen.
3. Batteriehalterungselement.
4. Smart-Sumo-Robotermodusschalter.
5. Schalten Sie den Roboter aus, um ihn auszuschalten.
6. Die HL2-LED leuchtet, wenn die Batterie schwach ist.
Nun ein paar Worte zu den Robotermodi.
Der SMART-Modus aktiviert den Fotowiderstand des Roboters, dh er beginnt auf Licht zu reagieren. Je heller die Beleuchtung, desto aktiver bewegt sich der Roboter. Im Dunkeln fährt der Roboter sehr langsam oder schaltet sich vollständig aus.
Wenn der SUMO-Modus aktiviert ist, beginnt der Roboter, verschiedene kleine Objekte zu erfassen und zu bewegen. Dies können beispielsweise Streichholzschachteln sein. Diese Funktion kann in Wettbewerben zwischen ähnlichen Robotern aktiviert werden. Verwenden Sie zum Aktivieren der Funktion den Schalter SB2.
Der Roboter kann sich in zwei Optionen bewegen, entweder fahren oder gehen. Sie können eine beliebige Kombination von Bewegungen erstellen, die sich abwechseln.Während der Fahrt dreht sich der Motor gleichmäßig und der Roboter fährt sehr ruhig. Beim Gehen werden dem Motor Impulse gegeben, und er bewegt sich ruckartig.
Eine weitere interessante Tatsache ist, dass der Roboter mit einem Notstromversorgungssystem ausgestattet ist. Wenn sich beispielsweise die Batterie zu entladen beginnt, aktiviert der Roboter einen Stromkreis, in dem die Spannung direkt an den Motor anliegt. Auf diese Weise können Sie die Gesamtleistung des Roboters um etwa das Zweifache steigern.
Montageprozess des Roboters:
Erster Schritt. Das Prinzip des Roboters
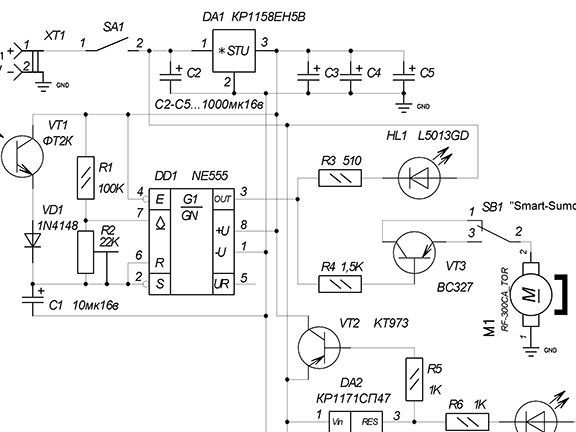
Der Impulsgenerator wird auf einem NE555-Timer-Chip erstellt. Wenn Licht in den Fototransistor VT1 eintritt, nimmt sein Widerstand und seine Frequenz ab, und in diesem Zusammenhang ändert sich auch die Impulsdauer auf dem DD1-Chip. Für das Ausgangssignal DD1 werden Rechteckstromimpulse von diesem abgegeben, sie werden dem M1-Motor und der HL1-LED gegenphasig zugeführt. Somit leuchtet die LED auf, wenn Pausen zwischen den Impulsen gebildet werden, und der Motor M1 wird mit einem negativen Impuls eingeschaltet. Weitere Details zur Funktionsweise des Roboters finden Sie im Diagramm.
Schritt zwei Wir montieren Funkkomponenten
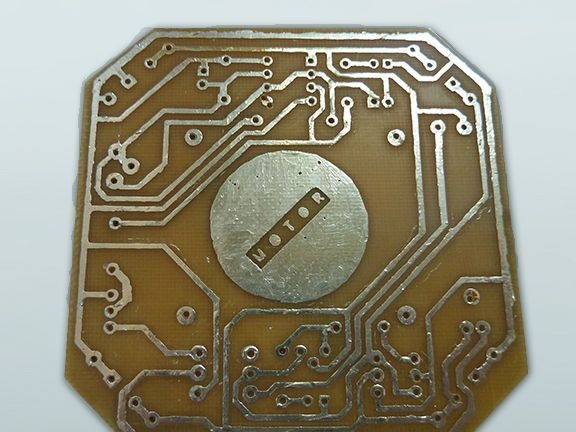
Um eine Tafel zu erstellen, müssen Sie die Zeichnung auf ein A4-Blatt drucken. Für die Beuteübersetzung müssen Sie ein Thermoblatt drucken, dafür wird ein Laserdrucker verwendet. Nach dem Erstellen der Karte müssen Sie die Spuren auf Kurzschluss prüfen. Dann wird eine auf Papier gedruckte Schaltung genommen und auf die Platte geklebt, so dass alle Löcher zusammenfallen. Dann können Sie mit der Installation der Funkelemente fortfahren. Nach der Montage des Sockels können Sie den DD1-Chip darin installieren. Der Fotowiderstand VT1 muss in voller Länge der Beine installiert werden. Nachdem die Fotodiode installiert wurde, muss sie so gebogen werden, dass ihre Vorderseite nach oben zeigt.

Schritt drei Referenzkondensatoren und Motor einbauen
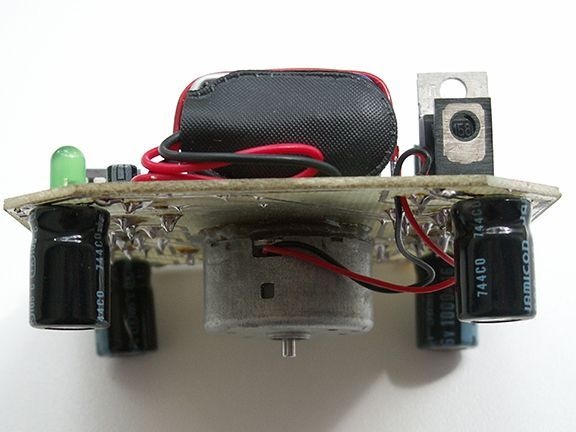
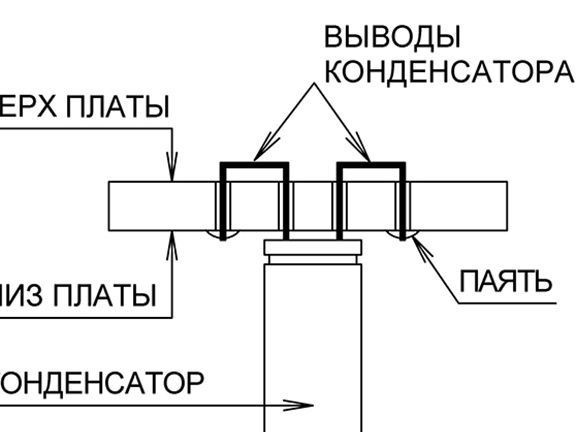
Kondensatoren mit den Bezeichnungen C2, C3, C4, C5 werden an der Seite von Live-Tracks installiert. Die Schenkel der Kondensatoren werden in die Löcher eingeführt und auf der anderen Seite gebogen und verlötet.
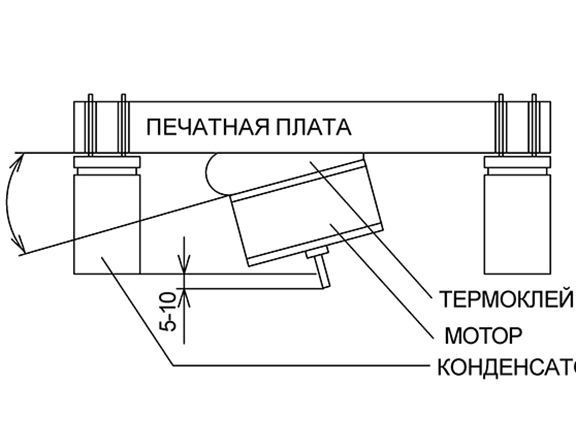

Der Autor installiert den Motor mit Heißkleber. Wird es von der Seite stromführender Gleise aufgebracht, ist der Einbauort des Motors durch einen Kreis gekennzeichnet. Sie können den Kleber mit einem Lötkolben erhitzen. Nun, nachdem der Motor geklebt ist, können Sie seine Ausgänge auf die Platine löten.
Schritt vier Roboterrad
Damit der Roboter beim Bewegen besser mit der Oberfläche interagieren kann, wird empfohlen, ein Stück Kambrium auf den Schaft zu legen. Mit einer solchen Verfeinerung bewegt sich der Roboter viel schneller auf der Oberfläche, wenn sich der Grip verbessert.
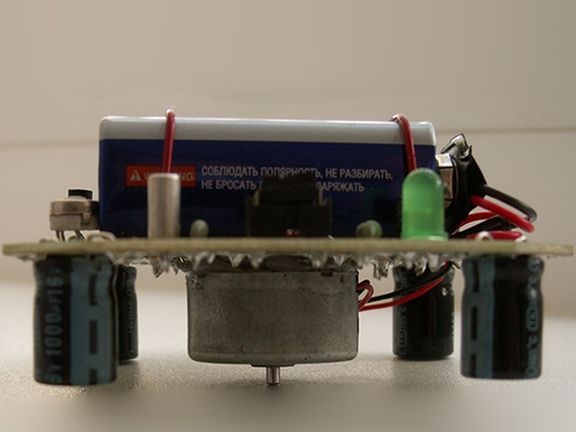
Schritt fünf Batterieeinbau
Damit die Batterie während des Betriebs nicht auf dem Roboter rutscht, muss sie gut fixiert sein. Verwenden Sie für diese Zwecke isoliert lange Büroklammern. U-förmige Klemmen sollten aus den Clips herausgebogen werden, die für die Batterie geeignet sind, und dann auf die Platine gelötet werden.

Schritt sechs Den Roboter einschalten und überprüfen
Der Roboter wird durch den SB1-Schalter eingeschaltet, während er sich in Bewegung setzen sollte, und die HL1-LED blinkt ebenfalls. Anschließend müssen Sie die Robotermodi einschließlich der entsprechenden Schalter überprüfen.
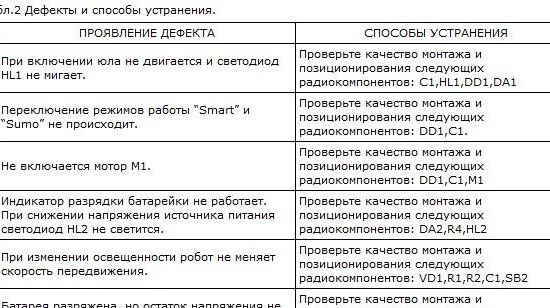
Wenn der Roboter nicht wie gewünscht funktioniert, ist das Problem manchmal sehr einfach zu finden. Speziell für diese Zwecke legt der Autor ein spezielles Schild zur Fehlerbehebung bei.