


Guten Tag, heute möchte ich Anweisungen zur Herstellung eines Panzers teilen. Für den internen Controller gibt es zwei Optionen: ESP -8266 und Arduino Pro Mini. In der ersten Version erfolgt die Steuerung über Wi-Fi-Kommunikation. In der zweiten - IR-Fernbedienung. Es basiert auf dem TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35), wird von einem Tamiya 70097 Doppelmotor-Getriebekit und den mit dem Getriebe gelieferten Motoren angetrieben.
Wir werden brauchen:
- TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35)
- Modellkleber (TAMIYA Cement zum Beispiel)
- Tamiya 70097 Doppelmotor-Getriebesatz
- ESP 8266 -12E oder Arduino Pro Mini 8 MHz 3,3 V.
- Spannungsstabilisator AMS 1117 3,3 V 8000 mA (falls Option mit ESP 8266-12E)
- Qifei L9110 Motortreiber
- Kondensator 10V 1000uF
- zweifarbige (rot, grün) LED
- blaue LED
- 2 rote LEDs
- IR-Empfänger
- Fotowiderstand
- 2 Fächer für 2 AAA-Batterien oder 4 AAA 1,2 V 1000 mA NI-MN-Batterien
- 2 Widerstände 2 Ohm
- 4 Widerstände 75 Ohm
- 6 Widerstände 10 kOhm (falls optional mit ESP 8266-12E)
- Taste
- Fotowiderstand
- USB - TTL
- Lötkolben
- mehrfarbige Drähte
Schritt 1 Gehäuse und Mechanik.
Zuerst müssen Sie sammeln das Modell TAMIYA 35162 Schutzenpanzer Marder 1A2 (1:35). Wir kleben den unteren Teil gemäß den Anweisungen, mit Ausnahme der Teile, die die Auslassöffnungen für die Getriebewellen abdecken. Leitsterne kleben auch nicht. Kleben Sie den oberen Teil gemäß den Anweisungen ohne Änderungen. Nachdem Sie alles geklebt haben, lassen Sie es trocknen und fahren Sie mit dem Sammeln des Getriebes fort. Wie aus der Anleitung hervorgeht, kann Tamiya 70097 in zwei verschiedenen Ausführungen montiert werden.
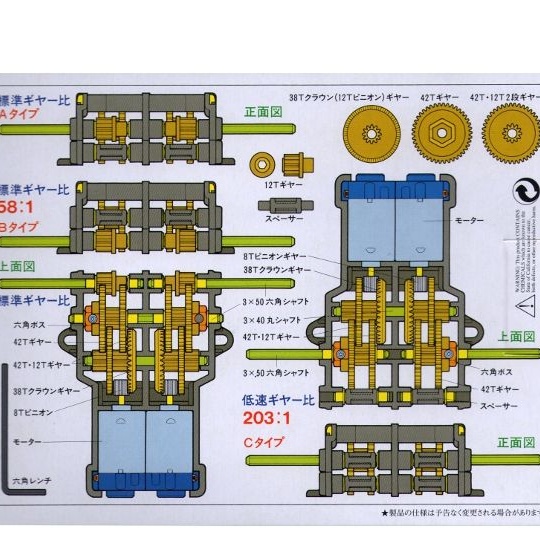
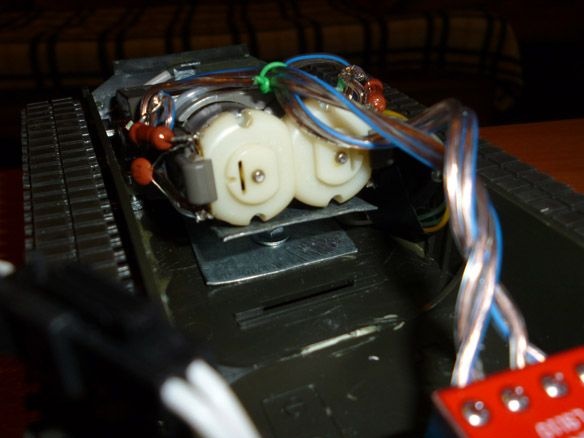
Die erste Option mit einem Übersetzungsverhältnis von 58: 1, die zweite - 203: 1. Wir brauchen die erste Option. Und auch hier ist es nicht so einfach. In diesem Fall kann der Achsausgang näher an der Unterseite des Getriebes oder in der Mitte liegen. Das Ausatmen der Achsen muss im mittleren Loch erfolgen! Nachdem wir das Getriebe zusammengebaut haben, bauen wir es am Modell ein. Theoretisch sollte alles einfach sein, denn sowohl das Modell als auch das Getriebe einer Firma. In der Praxis musste das Getriebe dort geschoben werden. In der horizontalen Position des Getriebes wölbten sich die Wellen der Antriebsräder nach oben, so dass wir eine Metallplatte schneiden mussten, die es ermöglichte, das Getriebe in der gewünschten Position zu fixieren.

Die Getriebeachsen müssen um 3 mm geschnitten werden. Dann kleben Sie die Antriebsräder darauf.

Im oberen Teil näher an der Rückseite bohren wir Löcher für eine zweifarbige LED und einen IR-Empfänger.

Näher an der Vorderseite befindet sich ein Loch für eine blaue LED, die als Taschenlampe dient.

Und in der Luke - für einen Fotowiderstand.

Kleben Sie auf der Rückseite die roten LEDs zur Beleuchtung.

Zu all dem müssen Sie die Drähte löten. Dies ist vor der Installation bequemer.
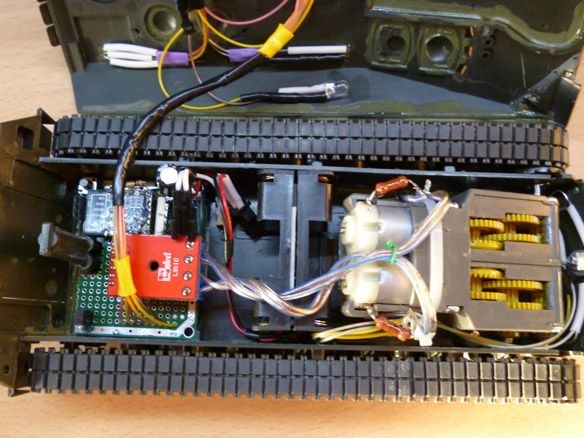
Schritt 2 Elektriker
Hier werde ich eine Auswahl von Optionen für die weitere Montage bereitstellen.
Wenn Sie sich für ESP 8266 entschieden haben. Das integrierte Wi-Fi-Modul erleichtert die Steuerung und Verbindung erheblich.Es kann einfach in der Arduino IDE programmiert werden. Am besten wählen Sie ein Modul mit 4 MB Speicher. In diesem Fall muss der Mindestkabelbaum zum Starten und Flashen des ESP-8266 gesammelt werden. Nur der VCC-Pin ist direkt mit der Stromversorgung verbunden, die restlichen Pins: CH_PD, RESET, GPIO0, GPIO2 müssen über einen Widerstand zur Stromversorgung (VCC) gezogen werden. 10-kOm-Widerstände können durch andere ersetzt werden, von 4,7 kOm bis 50 kOm, mit Ausnahme von GPIO15 - der Wert muss bis zu 10 k betragen. Direkt an das Minus (GND) des Netzteils schließen wir nur GND an und ziehen den GPIOO durch den Widerstand auf 10 kOm, um das Modul in den Firmware-Download-Modus zu versetzen, auf GND. Die Schaltfläche wird zum Neustarten und Flashen des Moduls benötigt. USB-TTL-Anschluss - für Firmware.
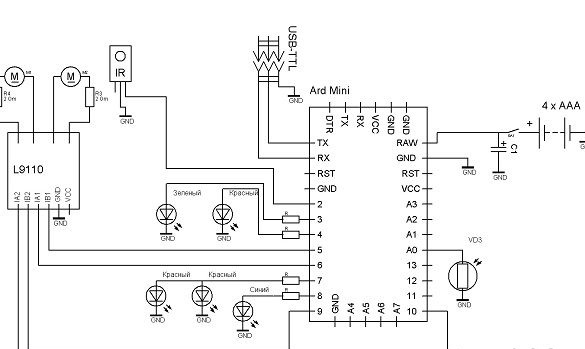
Hier ist ein Diagramm
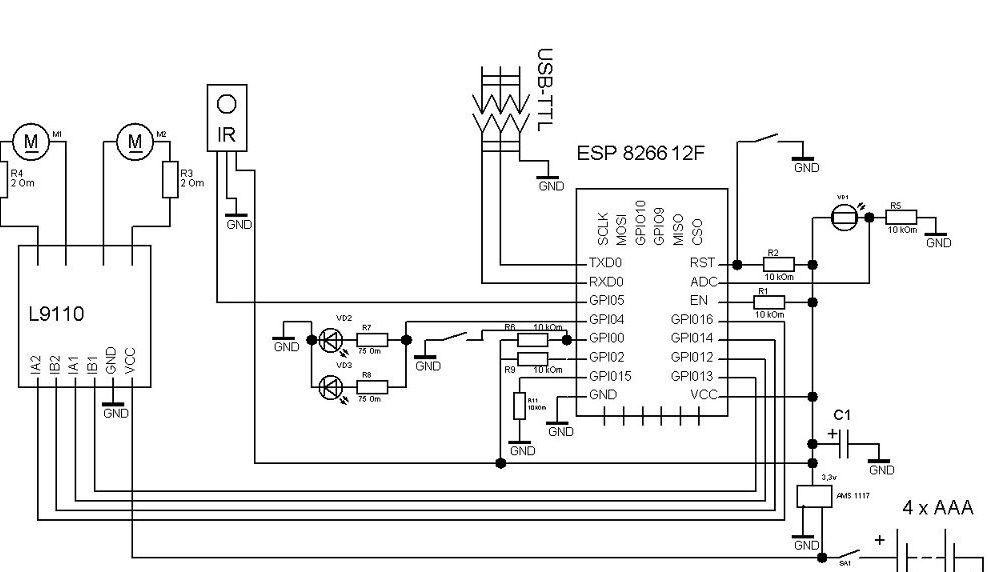
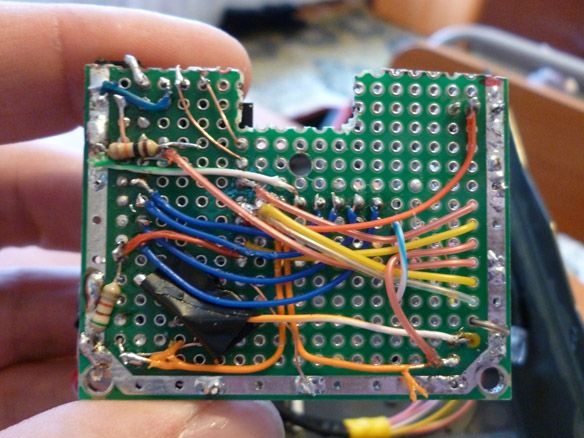
Ich werde ein wenig erklären, dass die blaue und zwei rote LEDs für die Hintergrundbeleuchtung benötigt werden (sie ist im Dunkeln sichtbar und schön), der Fotowiderstand an den ADC des Controllers angeschlossen ist und zur Bestimmung der Beleuchtung benötigt wird (wenn die Hintergrundbeleuchtung dunkel wird). 10 kOhm Pull-up-Widerstände, 75 Ohm für LEDs, 2 Ohm Strombegrenzung für Motoren (ohne diese ist der Controller beim Versuch, sich zu bewegen, überlastet). Wir löten alles entsprechend der Schaltung auf der Leiterplatte. Für die Stromversorgung können Sie 4 "kleine" Batterien oder vier in Reihe gelötete AAA-Batterien verwenden. Wir kleben zwei Fächer mit zwei Batterien mit doppelseitigem Klebeband und verbinden sie in Reihe. Sowohl Batteriefächer als auch Akkus befinden sich zwischen dem Getriebe und der Leiterplatte.

Wenn Ihre Wahl auf den Arduino fiel. Nur Arduino Pro MINI passt hinein. Es lohnt sich, eine 3,3-Volt-Platine zu wählen, da die Motoren für 3 Volt ausgelegt sind und Sie die Motoren und den Arduino nicht separat mit Strom versorgen möchten. Arduino ist einfacher. Der gesamte Steuerungskabelbaum und der Spannungsregler befinden sich bereits auf der Platine. Es bleibt, die Arduino-Buchse und den Motortreiber auf der Leiterplatte zu entlöten.

Schritt 3 Vorbereiten der Programmierumgebung.
Um die Firmware zu bearbeiten und die Skizze in ESP zu füllen, müssen Sie die Arduino IDE von der offiziellen Website von Arduino.cc installieren sowie das Add-On für ESP über Boards Manager installieren. Starten Sie dazu die Arduino IDE und fügen Sie dann im Feld Additional Boards Manager URLs File - Settings - den Link ein
http://arduino.esp8266.com/package_esp8266com_index.jsonKlicken Sie auf OK (in dieses Feld können Sie mehrere durch Komma getrennte Links eingeben). Geben Sie als Nächstes Tools - Board - Boards Manager esp8266 in das Filterfeld ein und klicken Sie auf ESP8266 by ESP8266 Community Forum. Klicken Sie auf Installieren und warten Sie, bis der Download abgeschlossen ist. Jetzt müssen Sie im Menü Extras die Option Board - Generic ESP8266 auswählen, die Frequenz Ihres Moduls auf 80 oder 160 MHz einstellen, die Größe des Flash-Speichers festlegen und die serielle Schnittstelle auswählen, an die der USB-TTL-Adapter angeschlossen ist.
Installieren Sie für Arduino einfach die Arduino IDE von der offiziellen Arduino.cc-Website.
Schritt 4 Firmware
Die Skizze muss noch bearbeitet und mit ESP gefüllt werden.
Im Feld "String _ssid =" ";" Zwischen Anführungszeichen steht, mit welchem Zugriffspunkt Sie eine Verbindung herstellen möchten.
"String _password =" ";" ist das Passwort für dieses Netzwerk.
"String _ssidAP =" Mardella ";" Der Name des Netzwerks, das der ESP auslöst, wenn er keine Verbindung zum vorhandenen herstellt.
"String _passwordAP =" 12345678 ";" - das Kennwort des Netzwerks, das der ESP auslöst, wenn er keine Verbindung zum vorhandenen herstellt.
"String SSDP_Name =" Mardella ";" SSDP-Name
Nach dem Start versucht ESP, eine Verbindung zu dem in der Skizze angegebenen Zugangspunkt herzustellen. Wenn dies erfolgreich ist, müssen Sie die IP-Adresse unseres Roboters ermitteln und über einen Browser eine Verbindung zu dieser Adresse herstellen. Sie können auch über einen Computer zur Netzwerkinfrastruktur gehen, dort unseren Tank finden und doppelklicken, um eine Verbindung herzustellen. Wenn die Verbindung fehlschlägt, wird der ESP zum Zugangspunkt. Der Zugriff kann dann erfolgen, indem Sie eine Verbindung zu einem neuen Zugriffspunkt herstellen und 192.168.1.1 in den Browser eingeben.
Das Webinterface besteht aus zwei Seiten. Der erste, der kontrolliert. Die zweite dient zur Anpassung. Auf der zweiten Seite können Sie den Zugangspunkt angeben, zu dem Sie eine Verbindung herstellen möchten, sowie den Namen des Tanks und den Namen und das Kennwort des Zugangspunkts, den das ESP auslöst. Alle Änderungen werden nach einem Neustart wirksam. Sie können das Modul auch über die Weboberfläche neu starten.
Für Arduino müssen Sie alle Felder "results.value" bearbeiten. Nachdem Sie die IR-Codes der Fernbedienung notiert haben, die Sie dort verwenden werden.

Video tanchika: