

Der Artikel wird ein Beispiel für die Erstellung eines legendären Roboters namens "Canbot" betrachten. Der Großteil der Details für den Roboter wird auf einem 3D-Drucker gedruckt. Der Roboter wird ferngesteuert.
Materialien und Werkzeuge für hausgemacht:
- Ein Atmel Attiny85-Mikrocontroller;
- zwei Microservices HXT900 oder deren Analoga;
- eine 3,7-V-LiPo-Batterie;
- ein Infrarotempfänger bei 38 kHz;
- Ultraschallwandler Typ HC-SR04;
- stattdessen 9x4mm Schalter oder Jumper;
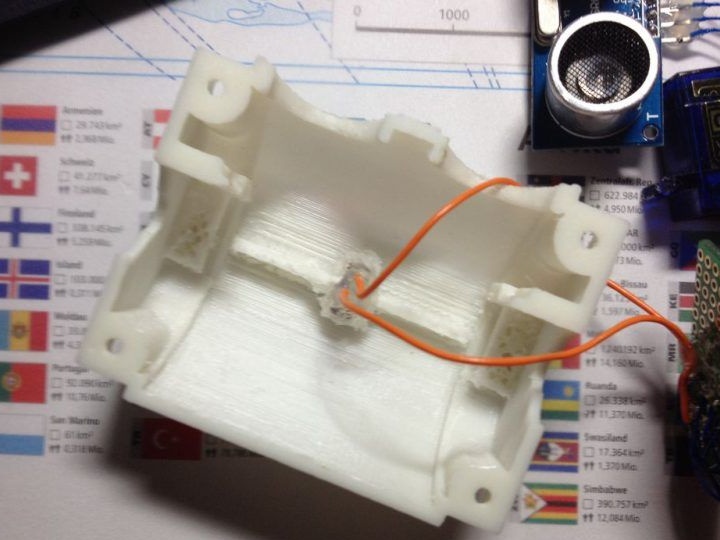
- 3D-Teile (möglich). Es werden ein Top (top.stl), ein Bottom (bottom.stl) und zwei Räder (Wheel.stl) benötigt.
Natürlich werden Lötwerkzeuge, Heißkleber, Schraubendreher, Schrauben, Drähte und andere Kleinigkeiten benötigt.

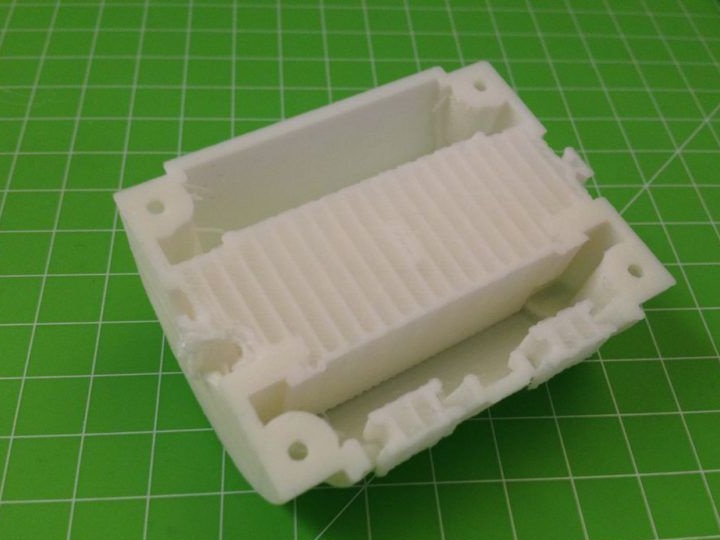
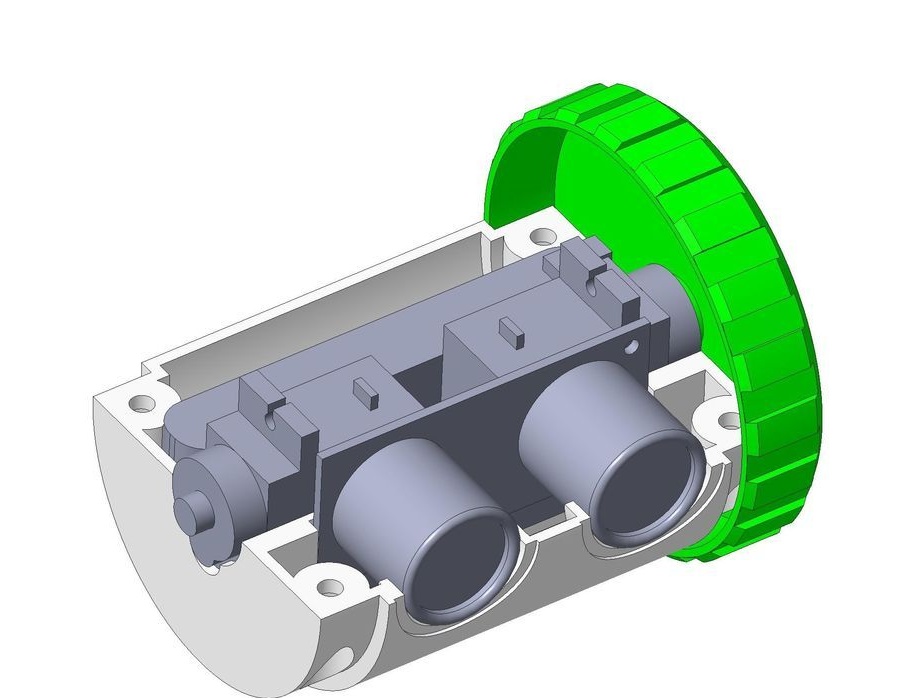
Der obere und untere Teil müssen mit der Option „Stützstrukturen“ flach nach unten gedruckt werden. Je nachdem, welcher Druckertyp verwendet wurde, müssen die fertigen Teile möglicherweise am Ende gereinigt werden.
Der Herstellungsprozess des Roboters:
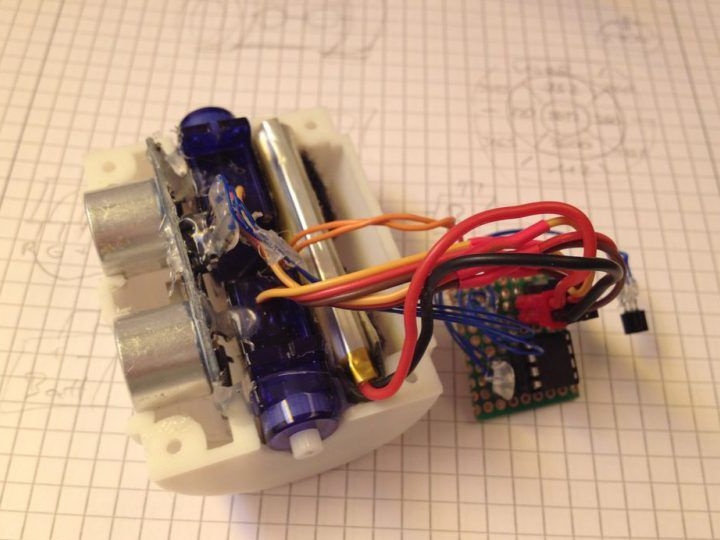
Erster Schritt. Elektronisch Teil des Roboters
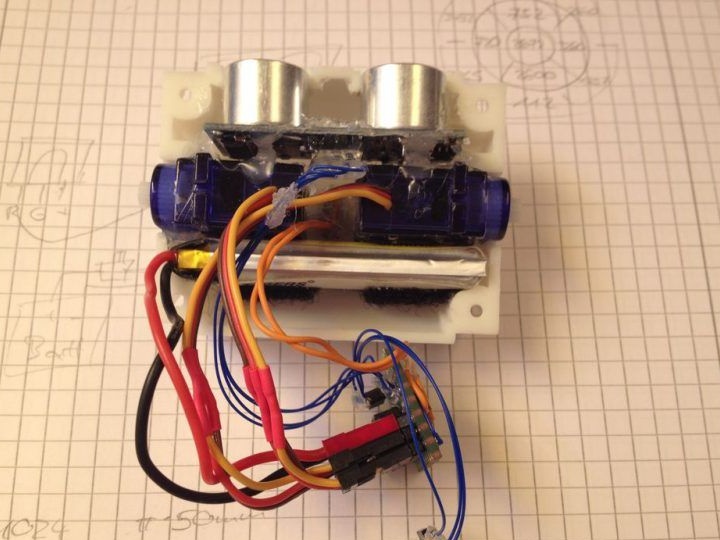
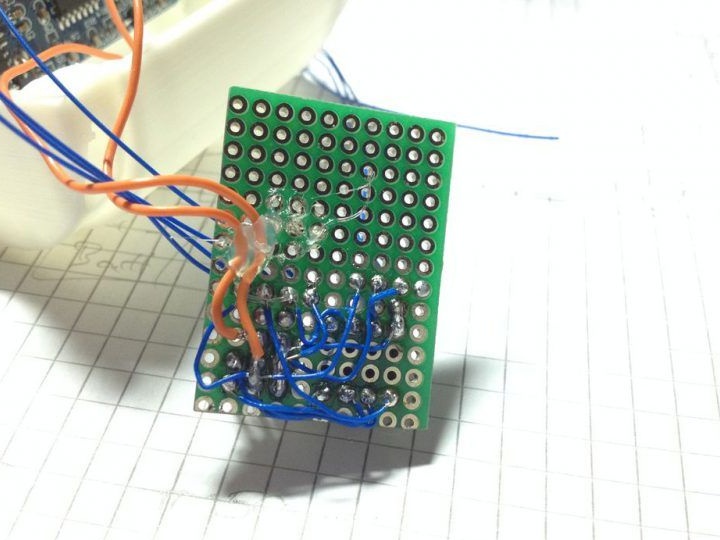
Zuerst müssen Sie die Servos konfigurieren, sie müssen in kontinuierliche Rotation umgewandelt werden. Wie das geht, gibt es im Internet jede Menge Anweisungen. Nun, dann müssen alle elektronischen Elemente wie in der Abbildung gezeigt zusammengebaut werden. Um das elektronische Teil bequem zusammenzubauen, können Sie ein kleines Stück Steckbrett sowie dünne Drähte nehmen.


Schritt zwei Der Software-Teil des Roboters
Wenn Sie sich dem Prozess der Erstellung eines Roboters mit höchster Professionalität nähern, kann der Softwareteil unabhängig geschrieben werden. Dafür müssen Sie jedoch eine Programmiersprache lernen. In einer einfacheren Version können Sie vorgefertigten Code herunterladen und einfach auf den Mikrocontroller hochladen.
Laut dem Autor das Beste der Roboter empfängt Infrarotsignale von Fernbedienungen der Marke Sony. In Zukunft muss der Codeteil erneut "geflasht" werden Arduino und geben Sie die Daten über die Funktion Serial.print () aus. Auf diese Weise können Sie herausfinden, welche Codierung auf jeder Schaltfläche vorhanden ist.
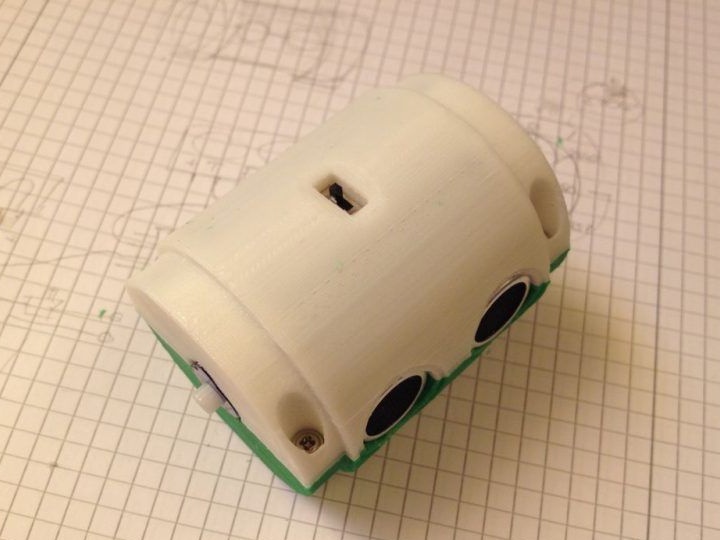
Schritt drei Die letzte Etappe. Montieren Sie den Roboter
Nun, abschließend geht der Roboter. Für diese Zwecke benötigen Sie Heißkleber. Damit müssen Sie die Drähte so befestigen, dass sie sich nicht lösen, wenn sich der Roboter bewegt.Es ist auch notwendig, den Schalter und den Ultraschallsensor gut zu befestigen. Zusammenfassend lässt sich sagen, dass die Abdeckungen des Roboters mit vier Schrauben verbunden sind, sodass sie bei Bedarf leicht zerlegt werden können. Schrauben für Servoantriebe eignen sich übrigens perfekt zur Montage.

Das ist alles, jetzt ist der Roboter fast fertig. Die Räder müssen noch auf den Wellen des Servomotors installiert werden, und Sie können mit dem Testen des Roboters beginnen. Sie können detaillierter sehen, wie hausgemacht das Video funktioniert.