
Dieser hier der Roboter gesteuert durch Bluetooth-Smartphone. Der Beschleunigungsmesser des Smartphones misst den Winkel des Telefons nach links / rechts, oben / unten, berechnet anhand dieser Daten die Geschwindigkeit der Richtungsmotoren, die Daten werden über Bluetooth an übertragen Arduino
Was Sie brauchen, um einen Roboter zu bauen.
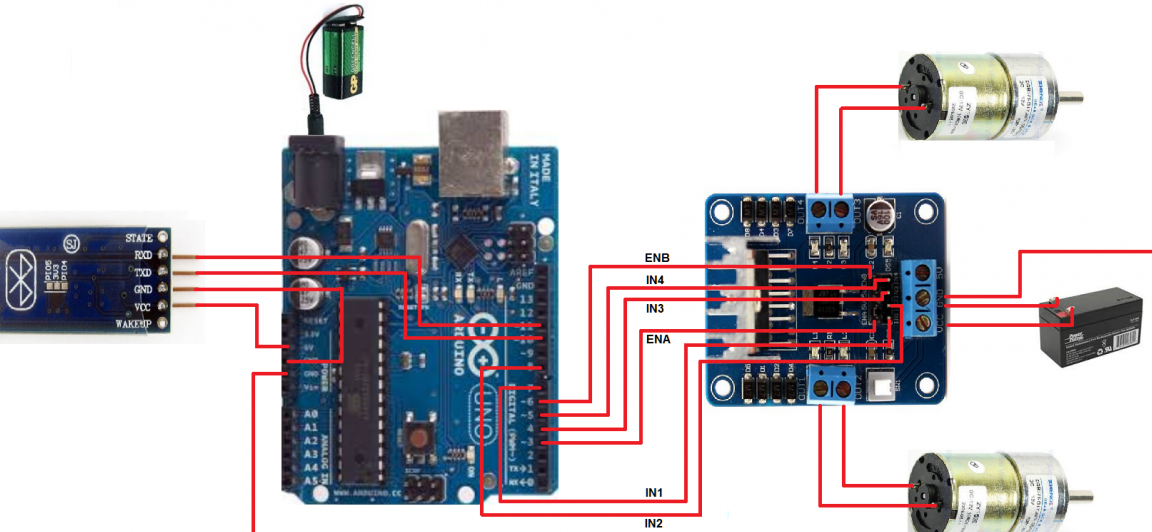
Arduino uno, HC-06 Bluetooth-Modul, zwei 12-V-Getriebemotoren mit 300 U / min, H-Brücke L298N Dual H-Brückenmotorsteuerung
12 bis 1,3 A Blei-Säure-Batterie. Jeder Motor verbraucht 0,4 A plus den Verbrauch an Treiberlogik. Arduino-Kabel, normale 9-V-Batterien und ein Anschluss zum Anschließen der Batterie an das Arduino. Elektrische Kabel zum Anschluss von Elektromotortreibern. USB-Kabel. Telefon mit Android Version 4 und höher. 4 drehbare 50-mm-Gummiräder von Screwfix oder Toolstation, zwei Lynxmotion HUB-02-Universalnaben.










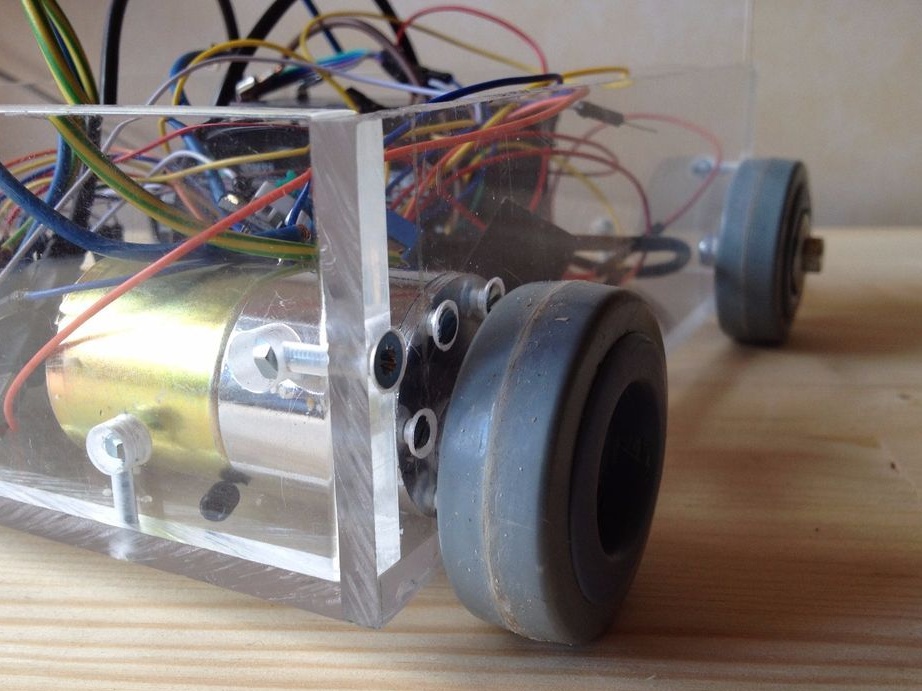
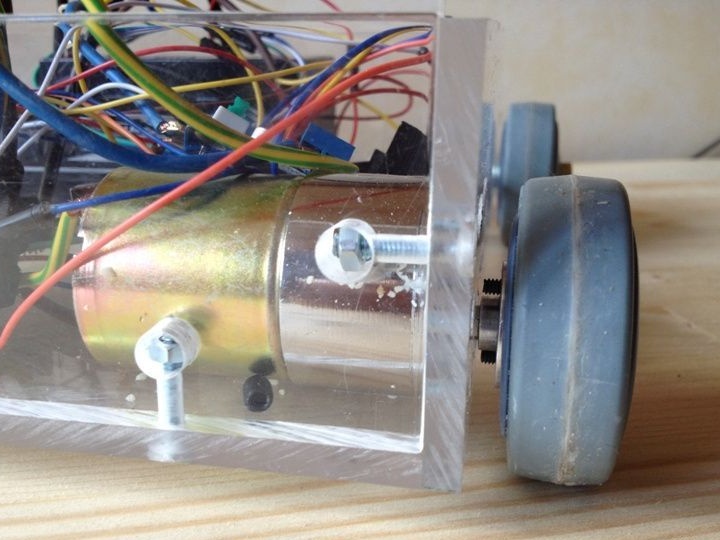
Das Gehäuse besteht aus 22 cm langem und 17 cm breitem Kunststoff. Zwei Motoren müssen mit der Welle verbunden und mit einem Gewindestift gesichert werden.
Vorderräder
Der Gummi wird von den Rollen entfernt und zwei Löcher werden entsprechend den Löchern in den Naben in sie gebohrt. Die Naben sind mit Gewindestiften an den durch das Gehäuse verlaufenden Achsen befestigt. Danach werden die Rollen an den Naben befestigt und mit Gummi versehen.
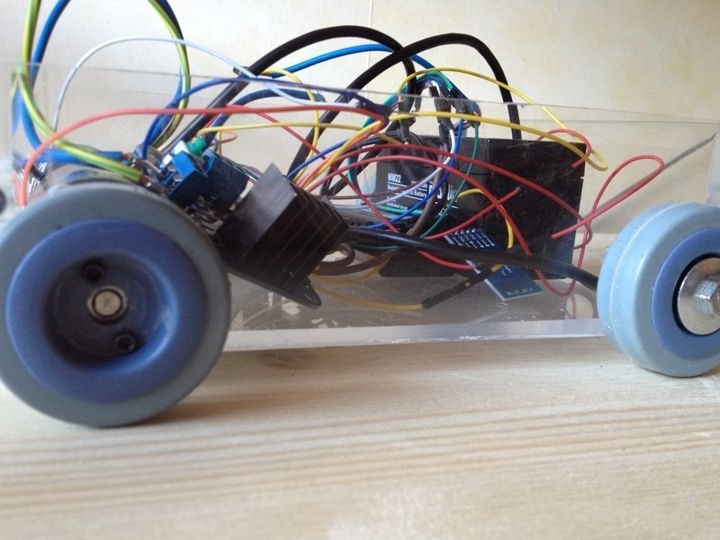
Hinterräder
Die Hinterräder werden einfach vom Scharnier abgeschraubt und durch im Gehäuse gebohrte Löcher gesichert.
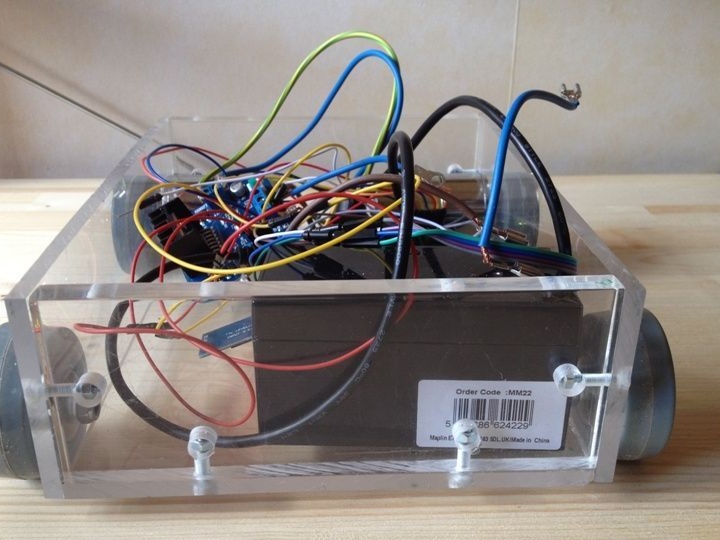
Elektrische Anschlüsse.
Beim Laden des Programmcodes in Arduino treten Probleme auf. Dies liegt daran, dass das Bluetooth-Modul, seine RX \ TX-Kontakte, mit den Arduino-Pins 1 und 2 verbunden sind, die auch zur Datenübertragung über USB verwendet werden. Es ist notwendig, die Kontakte 1 und 2 auf 11 und 12 in der verbundenen Bibliothek zu ändern, die für die Datenübertragung verwendet werden.
Der Motortreiber benötigt keine separate Stromversorgung für die Logik. 12 V reichen aus, um die Treiberlogik und den Motor selbst mit Strom zu versorgen. Das Minus der Batterie sollte sowohl mit dem Arduino als auch mit dem Motortreiber verbunden sein. ECA / 5V- und ENB / 5V-Motortreiberkontakte können überbrückt werden. Es muss entfernt werden, bevor eine Verbindung zum Arduino hergestellt wird. An die beiden 5-V-Pins darf nichts angeschlossen werden.
Android-Code.
Die angehängte Datei muss entpackt und in Android Studio importiert, in apk gepackt und auf dem Telefon installiert werden.
Schlüsseldateien:
Aktivität gekoppelter Geräte:
deviceList.java
activity_device_list.xml
LED- und Bewegungssteuerungsaktivität:
ledControl.java
activity_led_control.xml
Manifest:
AndroidManifest.xml
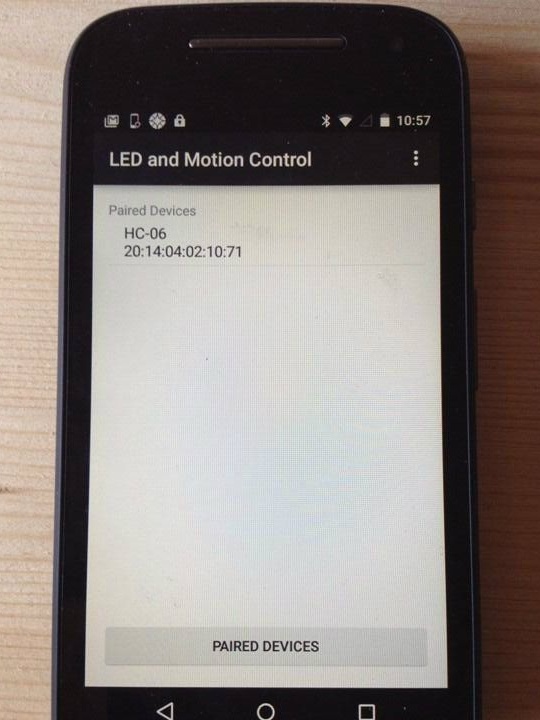
Die Aktivität "Gepaarte Geräte" zeigt die verfügbaren Bluetooth-Geräte an. Sobald die Geräte angeschlossen sind, wird die Steuerung auf die LED- und Bewegungssteuerungsaktivität übertragen.
Die Ein / Aus-Tasten senden eine "Ein" - oder "Aus" -Nachricht an das Arduino und schalten die eingebaute LED ein oder aus. Der Beschleunigungsmesser des Telefons steuert die Bewegung, die bei jeder Änderung dieser Werte x / y-Werte vom Sensor überträgt. Auf dieser Grundlage berechnet Arduino die Drehzahl und Drehrichtung der Motoren im Bereich von 0 bis 255. Diese Arduino-Werte werden in Form von 'L-255:' oder 'R100' usw. übertragen. Auf dieser Grundlage sendet der Arduino die Drehzahlbefehle des linken Motors an ENA, den rechten an ENB und ändert die Drehrichtung durch Ändern der Polarität auf IN1, IN2 für linke, N3 und N4 für rechte Motoren.