

Pultoide werden solche Roboter genannt, die mit der Fernbedienung ferngesteuert werden können. Beispielsweise kann für diese Zwecke eine TV-Fernbedienung verwendet werden. Die Hauptaufgabe, die sich der Autor bei der Herstellung eines solchen Roboters gestellt hat, ist die Einfachheit seiner Montage. Überlegt der Roboter erfordert keine Herstellung einer Leiterplatte, die Installation ist sehr einfach und erfolgt nur auf Karton.

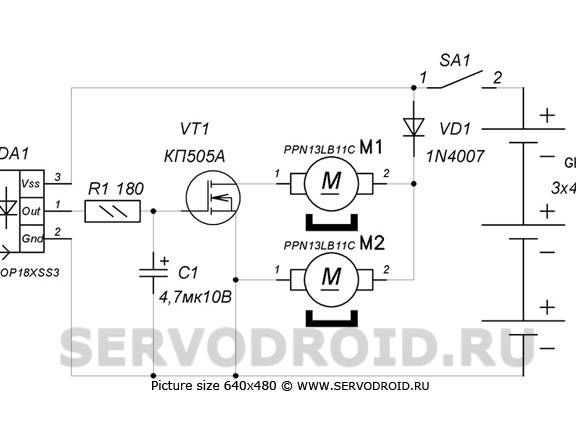
Elektronisch Die Roboterschaltung besteht nur aus vier Komponenten: einer Diode, einem Transistor, einem Fotodetektor und einem Kondensator. Für die Herstellung des mechanischen Teils wird auch ein Minimum an Materialien benötigt, zum Beispiel wird eine CD-ROM verwendet, um das Gehäuse herzustellen.
Ein auf diese Weise hergestellter Roboter versteht nur ein Team. Es lohnt sich, eine beliebige Taste auf dem Bedienfeld zu drücken, und der Roboter beginnt sich zu drehen. Wenn Sie die Taste weiterhin gedrückt halten, wird der Drehwinkel größer, sodass sich der Roboter um 360 Grad drehen kann.
Robotergerät
Eine CD wird als Grundlage für die Herstellung des Roboters verwendet. Die Leistungselemente werden mit M2-Schrauben befestigt. Die Elektronikplatine, auch das Batteriefach, wird mit Klebeband befestigt.
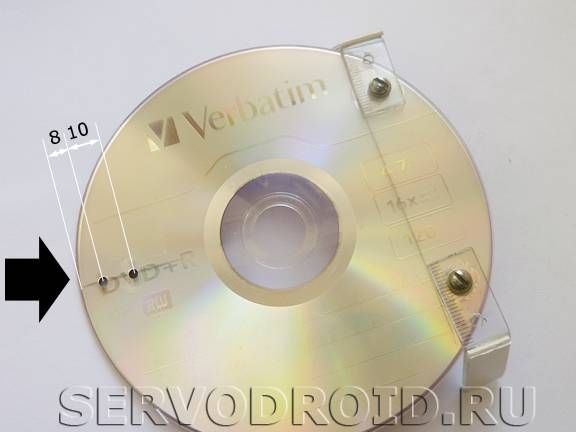
Was nun die Motoren betrifft, sind sie in einem Winkel angeordnet und ihre Wellen liegen an der Straße an. Somit besteht keine Notwendigkeit, die Räder separat herzustellen. Die Schrauben werden mit Rahmen befestigt, die aus einer Schullinie bestehen.
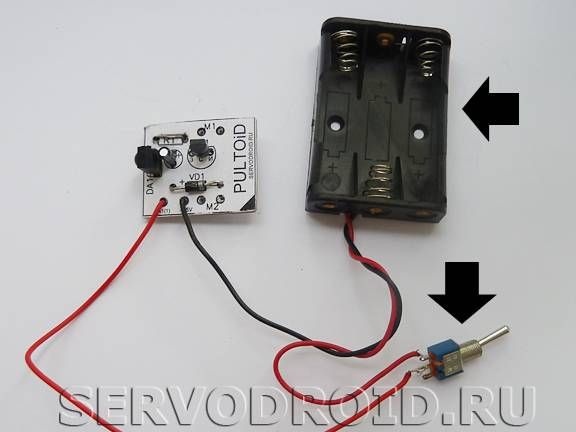
Drei „kleine Finger“ -Batterien versorgen den Roboter, sie sind in einem speziellen Fall installiert. Insgesamt erzeugt das Netzteil 4,5 V.
Und schließlich, der Fotodetektor, es ist nur einer hier, es ist eine Art TSOP. Es empfängt modulierte Signale von jeder Fernbedienung, dank derer der Roboter gesteuert werden kann.
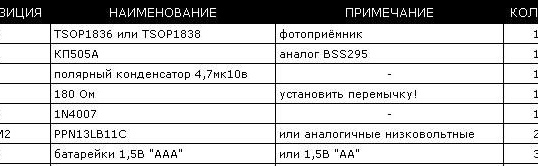
Materialien und Werkzeuge für die Herstellung:
- Nylonbänder;
- Fotodetektor Typ TSOP1836;
- ein Feldeffekttransistor (KP505A);
- eine CD;
- Fular für Batterien in drei Abschnitten;
- drei "kleine" Batterien;
- Plastiklineal;
- Schrauben zur Befestigung des Rahmens;
- Drähte und Schalter (Crossover-Typ).
Herstellungsprozess:
Erster Schritt. PCB-Design
Um eine Leiterplatte herzustellen, müssen Sie zuerst eine Zeichnung auf Papier drucken. Sie sollten zwei Bilder auf einer Installationszeichnung und auf der anderen Seite der Tafel erhalten. Insgesamt wird die Platte aus drei Elementen bestehen, in der Mitte befindet sich eine Wellpappe, die auf beiden Seiten mit Büropapier verklebt ist. Zum Verkleben der Platte wird empfohlen, einen trockenen Klebestift zu verwenden.
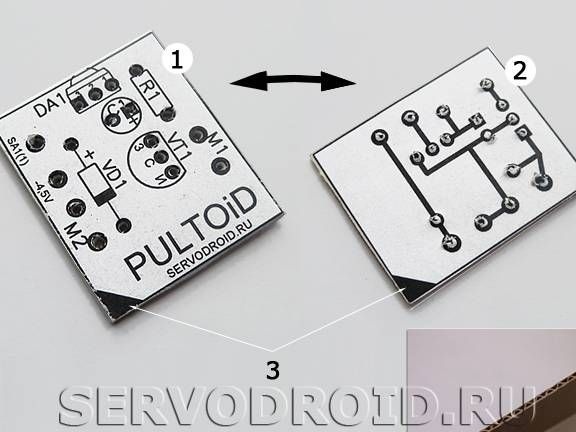
Schritt zwei Installation von Funkkomponenten
Bei der Installation elektronischer Komponenten ist es wichtig, die hervorstehenden Kanten der Kontakte nicht zu vergessen oder abzuschneiden. Anschließend werden sie gebogen und somit ein Stromkreis erzeugt. Alle Elemente werden durch Löten nach dem angegebenen Schema verbunden.
Der Widerstand R1 im Stromkreis muss durch einen Jumper ersetzt werden. Was den Fotodetektor betrifft, so ist auf dem Foto auch die richtige Reihenfolge seiner Verbindung dargestellt.

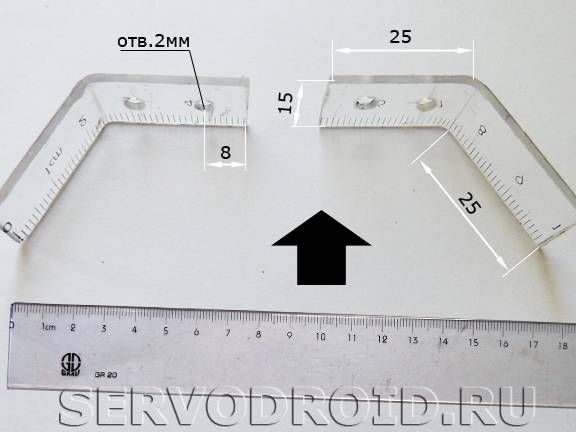
Schritt drei Power Frame Installation
Um die Motoren zu installieren, müssen Sie einen Leistungsrahmen erstellen. Als Material wird hier ein Plastikschullineal verwendet. Es muss in zwei Teile geschnitten und wie auf dem Foto angegeben gebogen werden. Damit sich das Lineal zu biegen beginnt, müssen Sie die heiße Lötkolbenspitze in einem Abstand von ca. 2 mm an eine Durchbiegungsstelle bringen. Auch für diese Zwecke können Sie einen Bau-Haartrockner verwenden. Das Lineal muss sanft in einen Winkel von ca. 30 Grad gebogen werden.

Nachdem der Frame erstellt wurde, können Sie mit der Installation fortfahren. Nehmen Sie dazu die CD und 2 mm Schrauben mit Muttern. Ferner werden an den richtigen Stellen Löcher mit einem Durchmesser von mindestens zwei Millimetern gebohrt und der Rahmen mit Schrauben befestigt. Damit der Rahmen nicht verrutscht, müssen Sie vor der Installation doppelseitiges Klebeband auf die Disc kleben.
Schritt vier Frontstütze einbauen
In die Vorderseite der Scheibe müssen Sie zwei Löcher bohren und einen Nylonestrich vorbereiten. Die Estrichgröße sollte 3x150mm betragen. Es muss wie auf dem Foto angegeben eingefügt werden. Infolgedessen wird die resultierende Unterstützung während des Betriebs des Roboters perfekt abgenommen und gleitet entlang der Straße.


Schritt fünf Motor einbauen
Um zu verhindern, dass Motorwellen entlang der Straße rutschen, müssen Schutzvorrichtungen angebracht werden. Sie bestehen aus Gummi, der sich auf den Pasten von Heliumstiften befindet. Um die Motoren einzubauen, müssen Sie zuerst ein Stück doppelseitiges Klebeband auf die Halterung kleben, um ein Verrutschen zu verhindern. Nun, dann werden die Motoren endlich mit Nylonbindern befestigt.

Schritt sechs Schalter und Netzteilanschluss
Als Stromquelle können Sie jede Batterie verwenden, deren Strom 5 Volt nicht überschreitet. In diesem Fall wird ein Gehäuse für Drei-Finger-Batterien verwendet, die insgesamt 4,5 V betragen.
Der Schalter ist am Spalt des von der Stromquelle kommenden positiven Kontakts montiert. Das rote Kabel ist an der Platine an Pin SA1 (1) und das schwarze Kabel an Pin -4,5 V befestigt.


Auch in diesem Stadium können Sie die Motoren anschließen, deren Drähte mit den Kontakten M1 und M2 verbunden sind.
Siebter Schritt. Endphase
In der letzten Phase müssen alle elektronischen Elemente repariert werden. Sie werden mit doppelseitigem Klebeband an der Festplatte befestigt. Der Schalter muss ebenfalls repariert werden, hierfür können Sie Heißkleber verwenden.

Das ist alles, jetzt ist der Roboter bereit. Sie können versuchen, es einzuschalten und einen Befehl zum Einschalten mit einer beliebigen Fernbedienung zu erteilen.