


Lassen Sie uns zunächst den Unterschied zwischen dem Oktokopter und dem Quadcopter verstehen. Dies ist neben dem Namen auch die Anzahl der Motoren auf den Schienen. Das heißt, Quadrocopter - vier Motoren, Octocopter - acht. Dies gilt auch für den Hexacopter - sechs, Tricopter - drei usw. Wenn es zum Beispiel vier (X) Führungen und acht Motoren gibt, ist dies immer noch ein Oktokopter, wird aber als X8 bezeichnet. Das heißt, auf vier Schienen acht Motoren.
Grundsätzlich sind Nummern mit einem Präfix für Copter Flugzeuge, die vom Funksignal des Bedieners vom Boden aus gesteuert werden. Ein Student aus Indien beschloss, weiter zu gehen und einen Oktokopter zu bauen, der eine Person in die Luft heben kann. Dies ist kein billiges Projekt. Die Finanzierung wurde von der Bildungseinrichtung übernommen.
Werkzeuge und Materialien:
- Motoren Turnigy CA170 Motoren - 8 Stück;
- Controller Turnigy Fatboy 300A - 4 Stück;
- Turnigy 200A HV-Regler - 4 Stück;
- Sender Hitech XG11 Tx / Rx;
-Flug DJI A3 Pro Controller;
-Flugregler DJI Naza M V2;
- Batterie Zippy 22,2 V 5 Ah 40 C LiPo - 16 Stück;
- Ladegerät 6s LiPo Ladegerät;
-XT150 Anschlüsse - 50 Stück;
-Draht 8AWG Sillicone Wire - 10 Meter;
Servos;
-Ball zum Spielen von Squash (Squash Balls) - 4 Stück;
- MDF-Folie 25 cm x 50 cm x 2 mm;
-Drill;
- Winkelschleifer;
- Schraubendreher;
- Schraubenschlüssel;
- Zangen;
-Laserschneider oder Bandsäge;
-Sortiment von Muttern 4mm, 6mm und 8mm, Schrauben und Unterlegscheiben;
-Brenner;
-LED LED;
-Lötzubehör;
- 2 und 3 mm Stahldraht;
-Telrepschraube 100mm-200mm - 40 Stk;
- 40 Haken und Ringschrauben;
- Drehzahlmesser Drehzahl;
-Power Analyzer (Turnigy Wattmeter / Ampmeter);
-Batterie-Controller;
- Aluminiumprofilrohre;
-Aluminiumplatte;
- Doppelseitiges Klebeband;
-Schweißvorrichtung;
-Roulette;
-Computer mit Fusion 360;
- Batterie 11,1 V 2200 mAh LiPo 30C;
-Dichtes Gewebe 1,2 mx 1,2 m;
- Starker Faden und Nadel;
-Gurtsicherheit;
Erster Schritt: Design
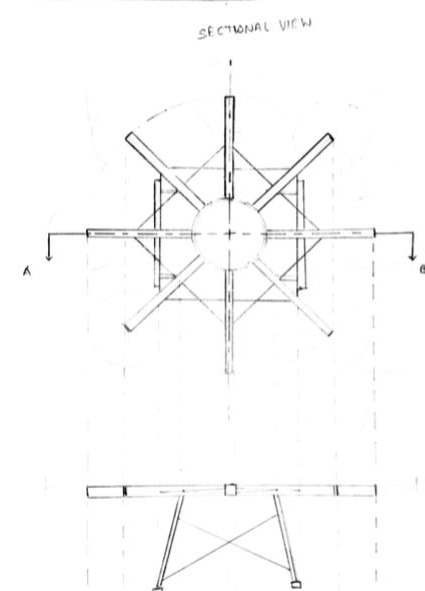
Bei der Entwicklung eines bemannten Oktokopters berücksichtigte der Master verschiedene Konfigurationsoptionen sowie X8 und H und T, kam jedoch zu dem Schluss, dass das Design des Oktokopters nach dem traditionellen Schema aus verschiedenen Gründen am optimalsten wäre.
Dann musste herausgefunden werden, wie groß der Oktokopter sein sollte. Die Berechnungen wurden am Beispiel von CAD-Modellen am Fusion 360 durchgeführt. Die vorhandenen Schrauben wurden bei den Berechnungen berücksichtigt. Das Optimum war ein Durchmesser von drei Metern, eine Höhe von einem Meter. Innenkorb für eine Person 55x55 cm.

Schritt zwei: Einkaufswagen
Der Rahmen wurde aus einem quadratischen Aluminiumprofil mit einem Regal von 50 mm und einer Wandstärke von 2 mm geschweißt.
Das Profil wurde geschnitten und geschweißt. Die Nähte werden gereinigt.



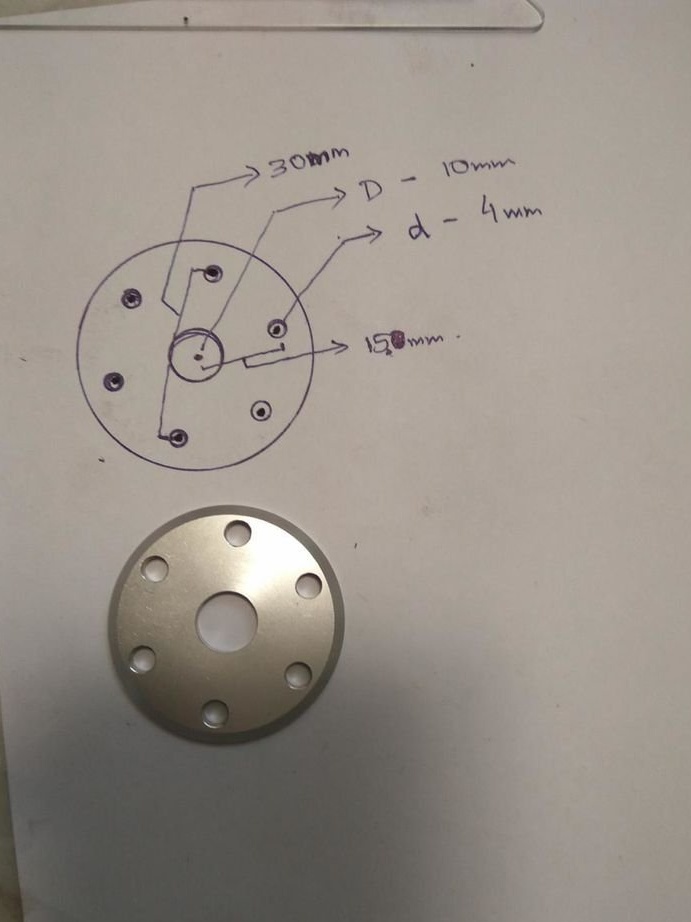
Schritt drei: Montageplatten
Für Halterungen verwendete der Master Aluminiumplatten von 1,5 mm. Insgesamt gibt es acht Klammern, vier in den Ecken und vier in der Mitte des Rahmens. Die Länge der Armschulter und des Stützteils beträgt jeweils 15 cm. Die Halterungen wurden in der Fusion 360 entworfen. Die Platten wurden mit einem Fräser geschnitten. In sie werden Befestigungslöcher gebohrt. Dann wurden die Halterungen an den Rahmen geschweißt.

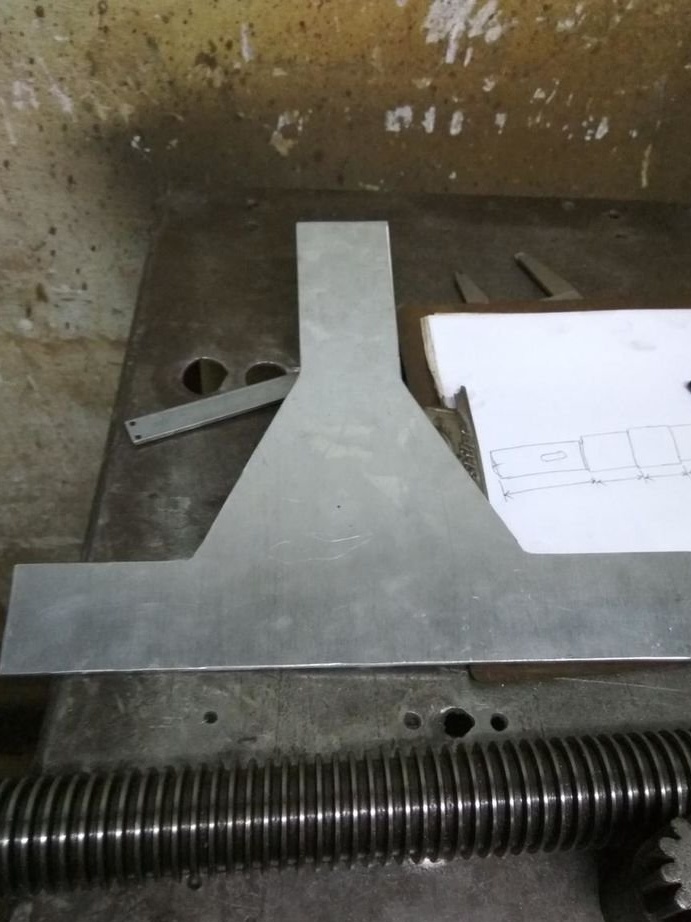





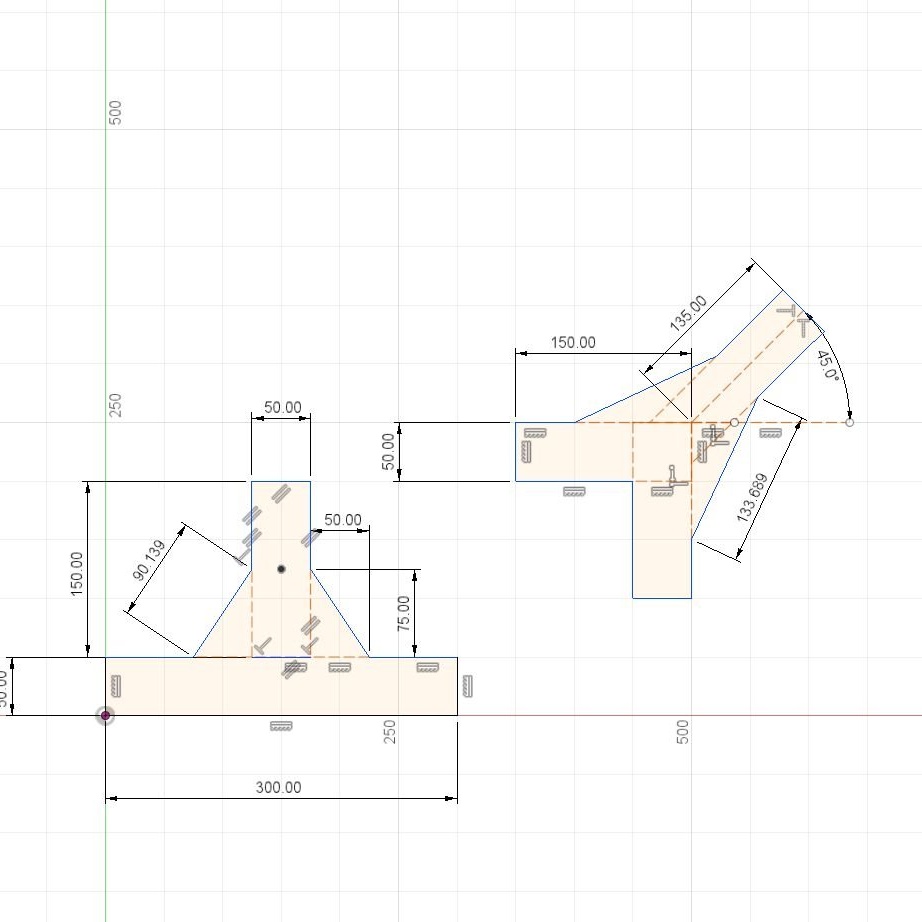
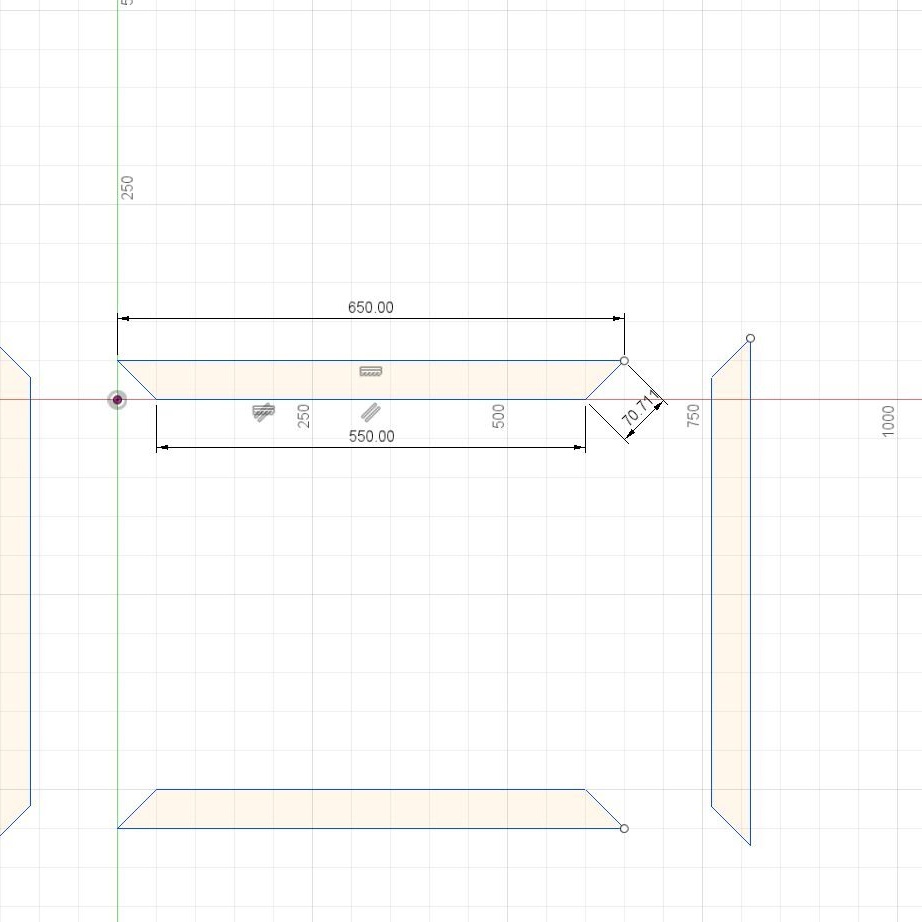
Schritt vier: Trägerprofil
Diese Profile sind an den Halterungen angebracht und Motoren sind an ihren Enden installiert. Die Profile sind quadratisch, 50 x 50 cm und unterschiedlich lang. An den Ecken sind Profile mit einer Länge von 112,5 cm angebracht. An den Seiten ist ein Profil von 125 cm angebracht. Bei Winkelprofilen in einem Winkel von 45 Grad ist ein Ausschnitt angebracht. Es ist notwendig, dass seine Endfläche an die Winkelebene angrenzt.
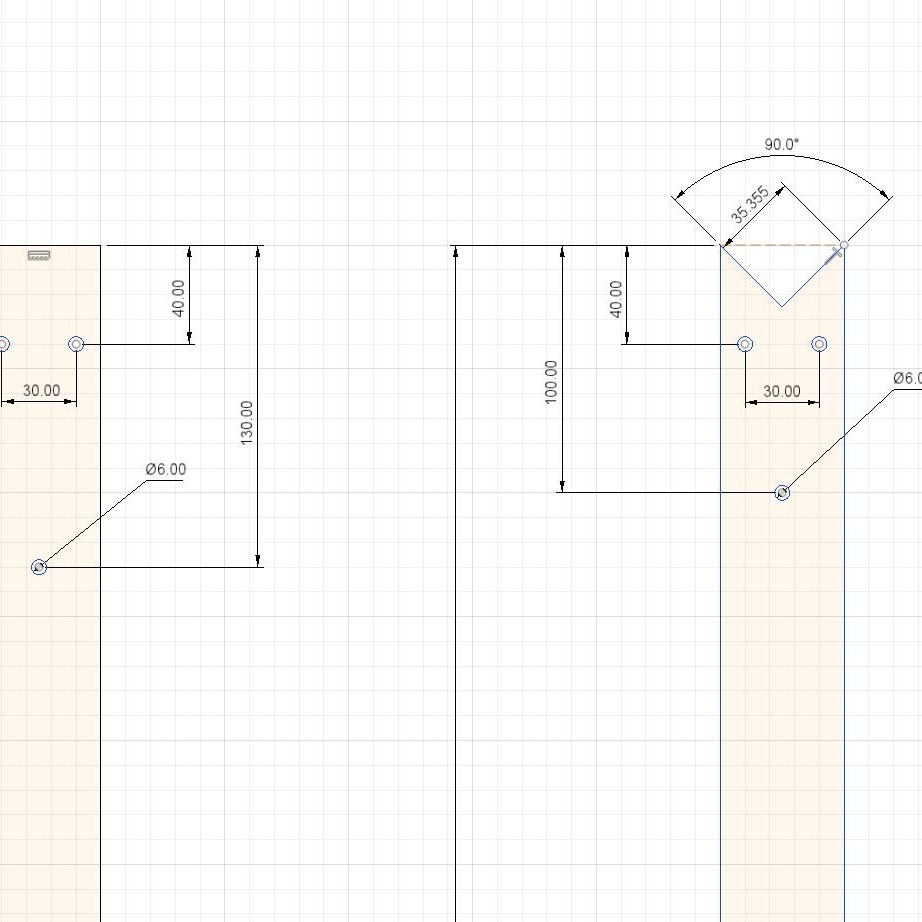
Um die Profile an den Halterungen zu befestigen, bohrt der Master Löcher für die Schrauben.




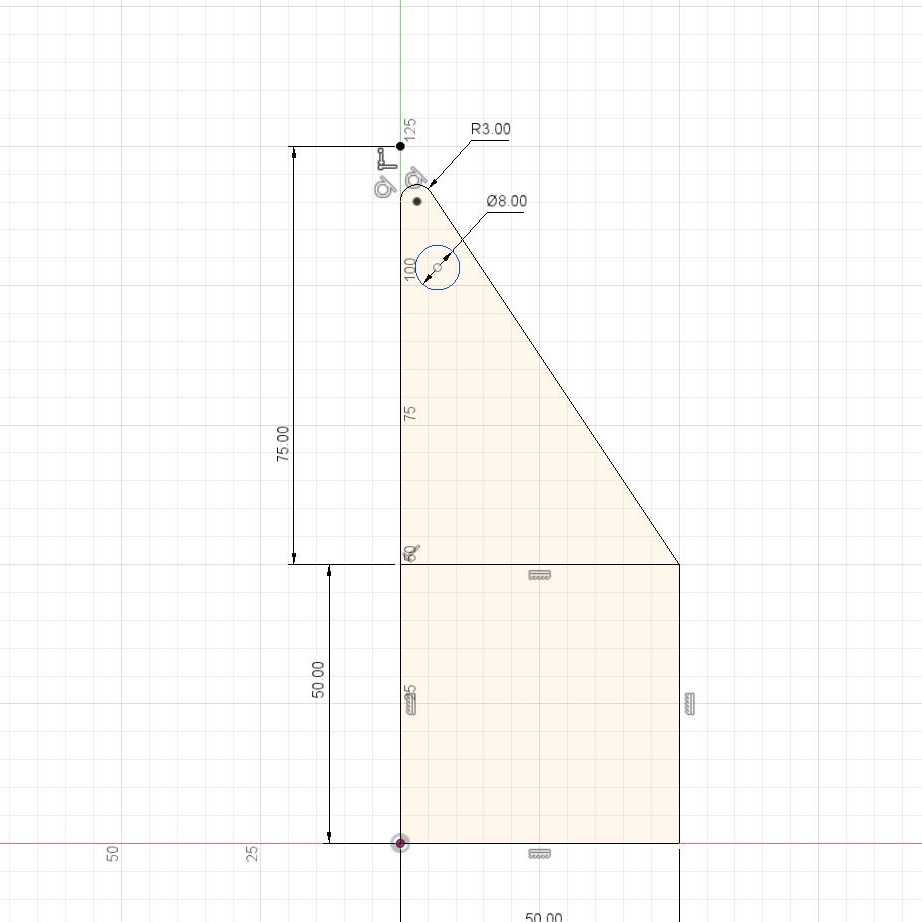
Fünfter Schritt: Motorhalterung
Die Motoren werden auf eine quadratische Aluminiumplatte geschraubt. Von der Unterseite der Platte werden parallel zueinander zwei Ecken verschraubt. Der Abstand zwischen ihnen entspricht der Breite des Profils. Ferner wird die Platte mit dem Motor auf dem Profil montiert, die Befestigungslöcher werden gebohrt und alles wird mit Schrauben gedreht.





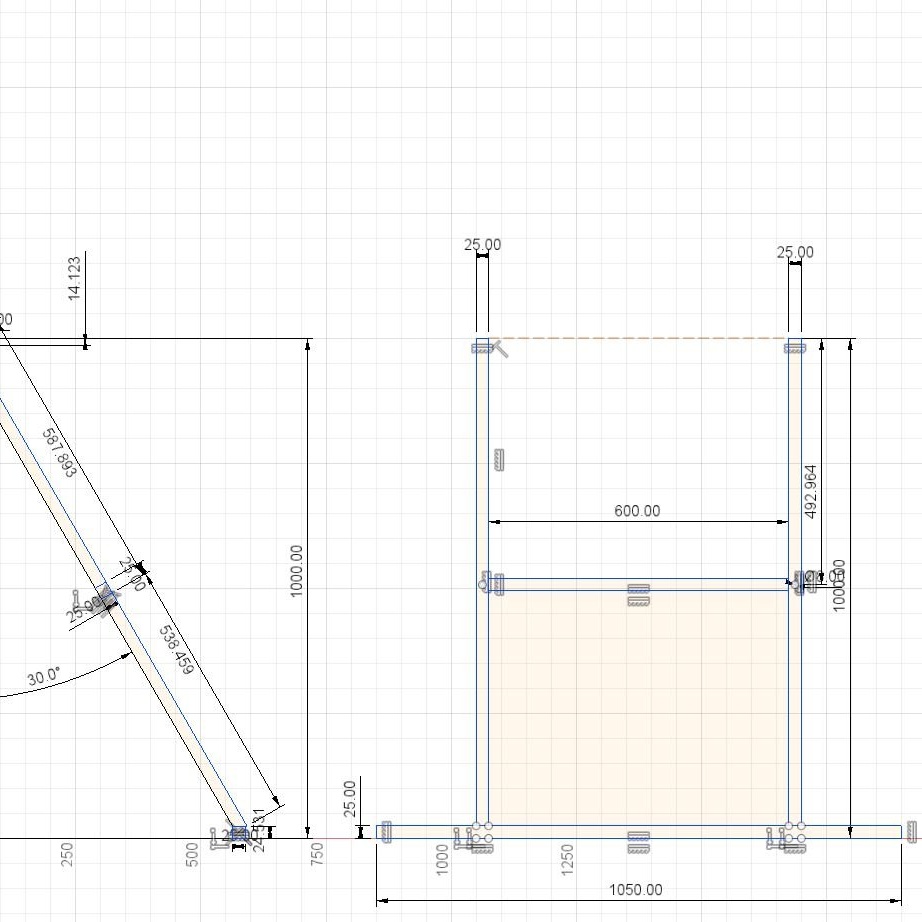
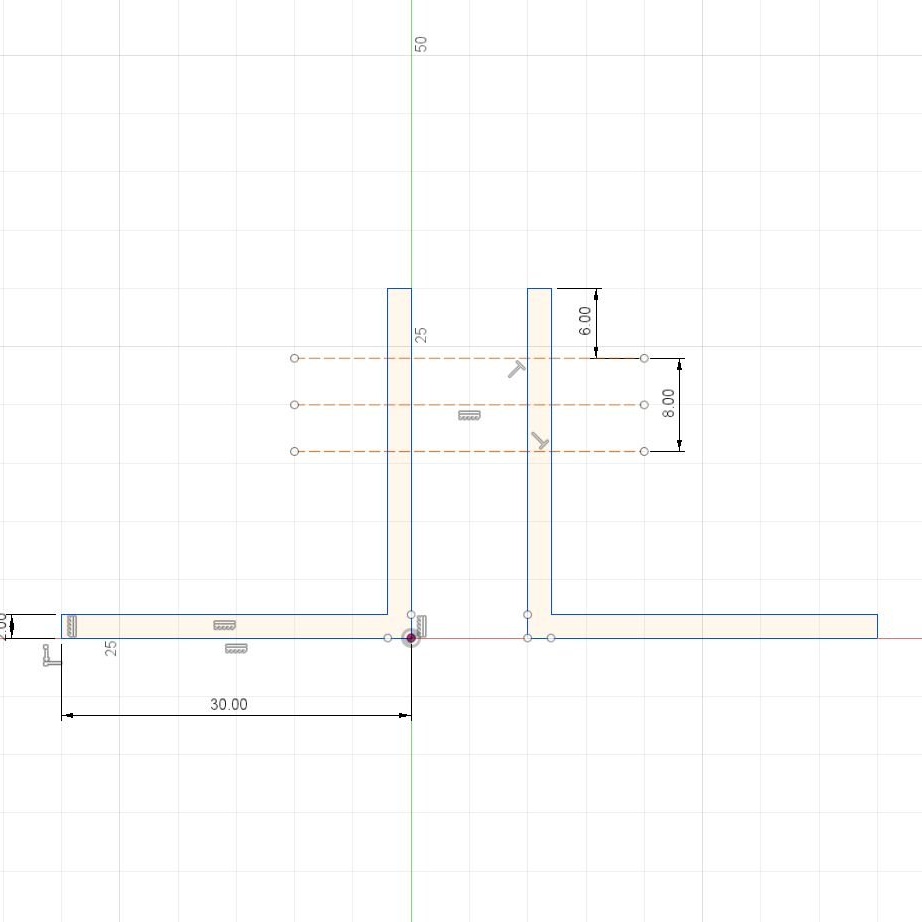
Schritt sechs: Chassis
Das Chassis bestand aus Aluminiumprofilen von 25 x 25 mm und einer Dicke von 3 mm. Alle Teile wurden geschweißt und ihre Größen sind auf dem Foto zu sehen. Die Idee war, das Chassis in einem Winkel von 30 Grad aus dem Korb zu montieren. Um eine Beschädigung des Gehäuses zu vermeiden, werden Stützkabel zwischen ihnen gezogen.


Schritt sieben: Support-Profile unterstützen
Nach dem Einbau der Motoren begannen sich die Stützprofile zu verbiegen. Dann versuchte der Meister den Motor zu starten und stellte fest, dass die Profile "laufen". Es war notwendig, das Design zu stärken.
Das Hinzufügen von Platten würde der Struktur zu viel Gewicht hinzufügen. Dann beschloss der Meister, ein V-förmiges Design aus dem Korb nach unten zu machen. Seile sind an seinem unteren Teil befestigt. Die anderen Enden der Kabel sind an den Halterungen in der Mitte der Stützprofile befestigt. Kabel werden mit einem Hebezeug gezogen. Dadurch wird die Struktur steif.















Schritt acht: Verbinden
Zuerst löt der Master die Steckverbinder an die Enden der Drähte.


Dann beginnt die Installation. Jeder Motor musste auf Drehrichtung überprüft werden. Bei Bedarf ist es einfach, die Drehrichtung des Motors und dementsprechend die Schraube zu ändern, indem zwei der drei vom Regler kommenden Drähte zum Motor ausgetauscht werden. Nachdem alle Motoren korrekt angeschlossen waren, führte der Assistent die Installation gemäß dem Anschlussplan des Herstellers durch.
Die IMU DJI A3-Flugsteuerungen reagieren sehr empfindlich auf Störungen durch Metalle, und der Master konnte das System aufgrund von Störungen nicht konfigurieren. Infolgedessen ersetzte der Master A3 durch den Naza M V2, der ein ähnliches Verbindungsschema hatte. Naza M V2 arbeitete sehr zuverlässig.
Dann verbindet der Assistent die Batterien. Auf jedem Trägerprofil sind zwei 22,2-V-Batterien in Reihe geschaltet.



Schritt neun: Pilotensitz
Der Sitz wurde aus strapazierfähigem Stoff genäht. Außerdem ist am Piloten ein Sicherheitsgurt angebracht, der am Rahmen befestigt ist, und ein Helm.






Schritt zehn: Erster Flug
Vor dem Flug des Piloten mit einem Oktokopter wurden mehrere Tests mit einem Sandsack und anschließend mit einem Modell einer Person durchgeführt. Während des Fluges wurden verschiedene Situationen simuliert, von Kontrollverlust bis zu Windstoß.
Nach allen Tests flog der Pilot schließlich in die Luft.






Vor dem Fliegen müssen Sie die folgenden Aktionen ausführen.
Überprüfen Sie den festen Sitz der Schrauben, Kabel und der Motorhalterung.
Überprüfen Sie die Verkabelung.
Überprüfen Sie, ob sich die Schrauben leicht drehen lassen.
Stellen Sie sicher, dass alle Regler ausgeschaltet sind.
Stellen Sie sicher, dass alle Batterien sicher angeschlossen und aufgeladen sind.
Schließen Sie den Flugregler zur Initialisierung und Kalibrierung an die Stromversorgung an.
Nach dem Herstellen einer Verbindung zum GPS wird in den vollautomatischen Modus gewechselt (Alt. + Att. Halten).
Setzen Sie sich auf den Pilotensitz und schnallen Sie sich an.
Schließen Sie alle Batterien an den Regler an.
Verbinden Sie die beiden Batterien in Reihe (ESC-RB-RB-ESC) mit einem Widerstand, um den Funken zu beseitigen.
Schalten Sie die Motoren ein, indem Sie den Schalter auf Ein stellen.
Verwenden Sie die Steuerung, um den Oktokopter zu steuern.