
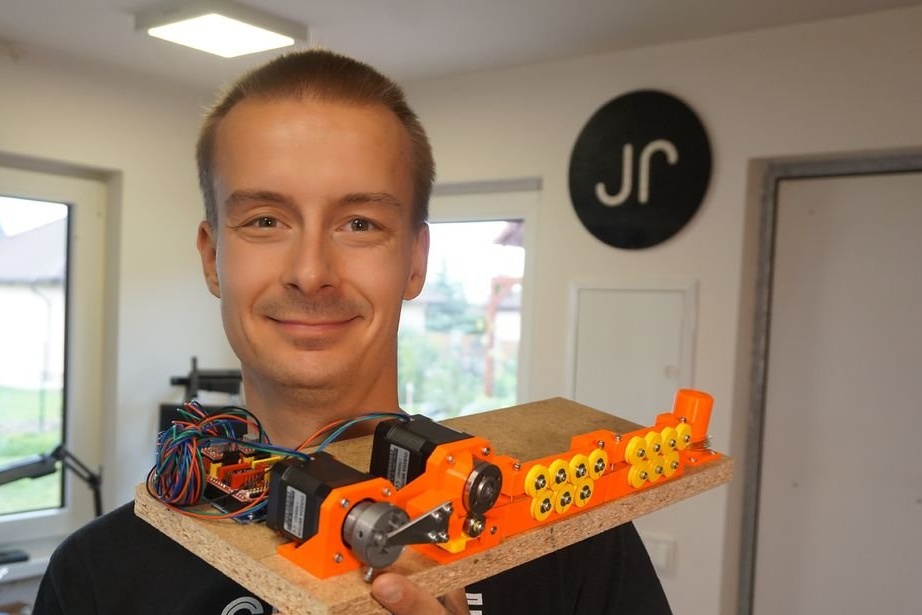
Ein interessantes Gerät wurde vom Meister erfunden und hergestellt. Dies ist eine Vorrichtung zum Biegen von Draht jeder Form. Die Herstellung von Federn ist eines seiner Merkmale. Diese Maschine kann 0,8 / 0,9 / 1 mm Draht in jede 2D-Form biegen.
Das Hauptziel der Herstellung dieser Maschine war die Automatisierung des Biegeprozesses. Andere hausgemachte Maschinen sind nicht sehr genau und ihre Biegungen haben einen ziemlich großen Radius.
Die zweite Aufgabe bestand darin, die Verwendung allgemein verfügbarer Teile und Komponenten so einfach wie möglich zu gestalten. Einige Teile der Maschine werden auf einem 3D-Drucker gedruckt, und Metallteile können im Geschäft gekauft werden.
Wofür ist der Master für eine solche Maschine? Er interessiert sich für LED-Figuren, Schneeflocken, Sterne, Blumen usw. Bei ihrer Herstellung werden identische Teile aus Draht benötigt, und diese Maschine wird ihre Herstellung erleichtern.
Sehen wir uns ein kurzes Video mit einem Beispiel des Geräts an.
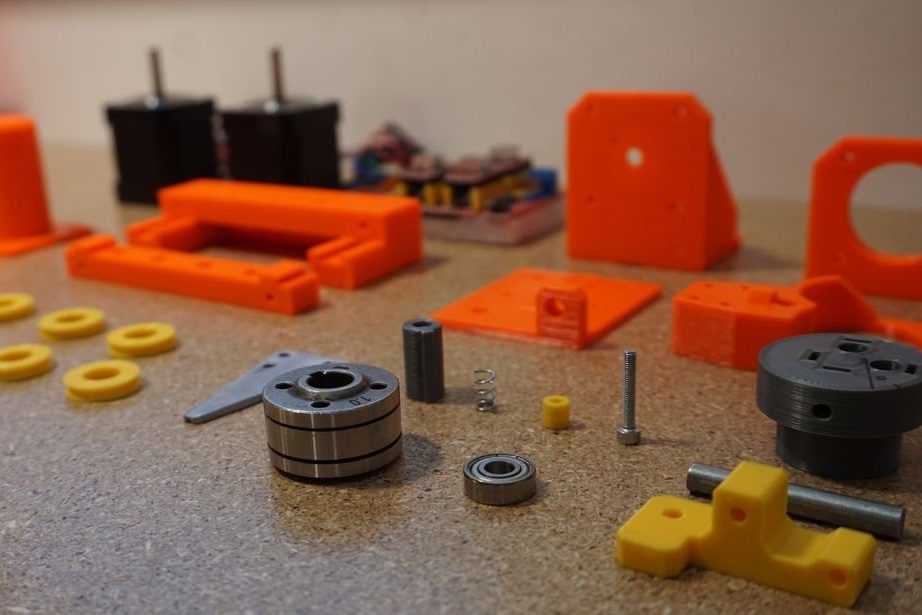
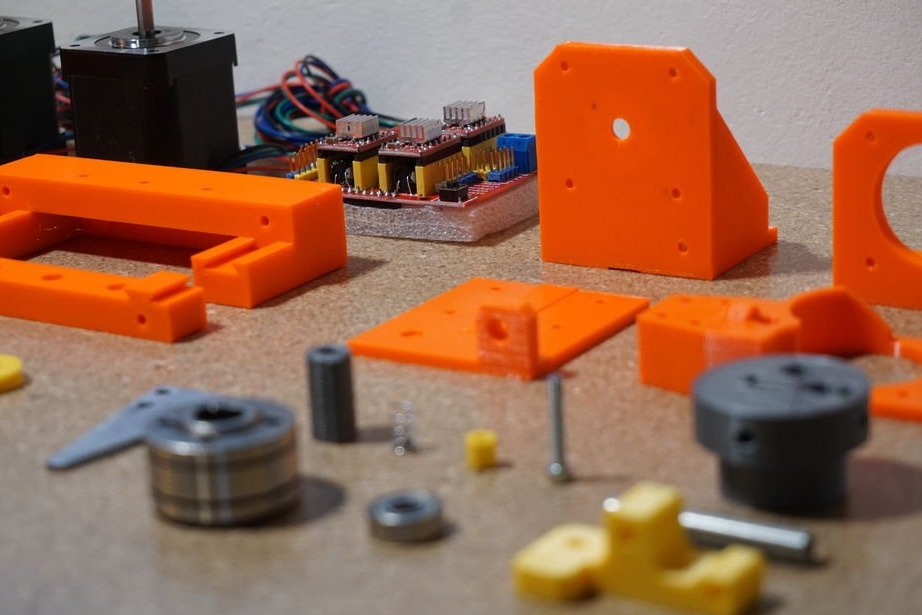
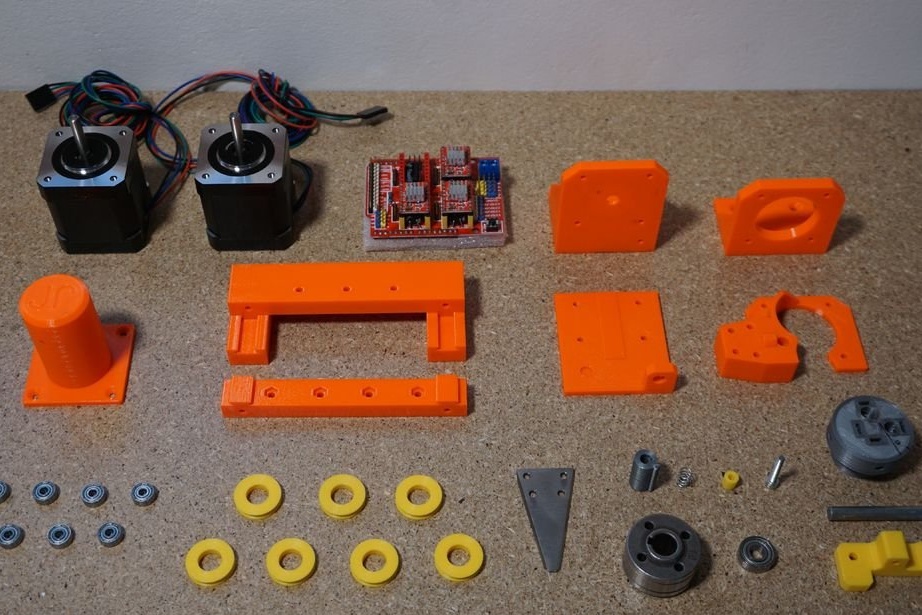
Für die Herstellung einer solchen Maschine verwendete der Meister Folgendes
Werkzeuge und Materialien:
-3D Details (Druckdateien können heruntergeladen werden hier);
-Fasteners;
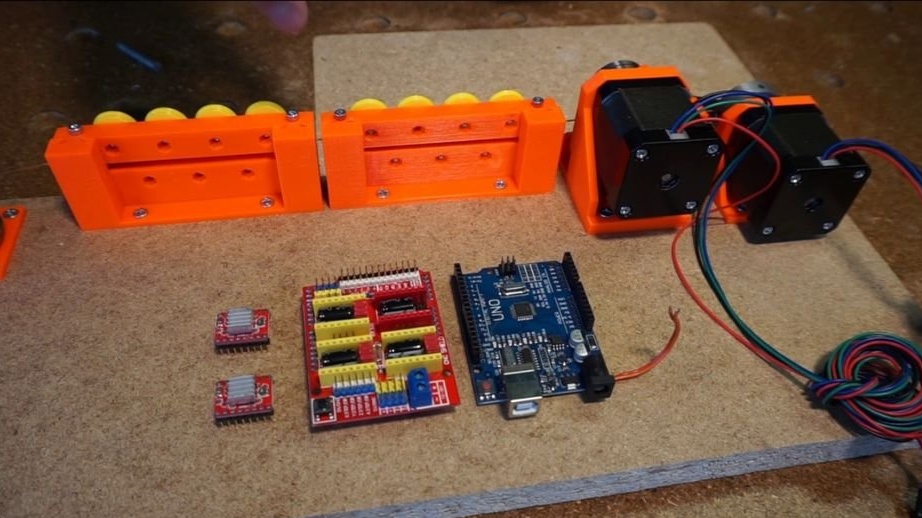
-Arduino UNO;
-Erweiterungsausschuss für Arduino UNO;
-Schritt-Treiber A4988 -2 Stk;
-Schrittmotor NEMA17 -2 Stk;
-12V 3A Stromversorgung;
- Drahtvorschubmechanismus;
Stahlfeder 4x6 mm;
- Lager 3x10x4 mm;
- 6x15x4 mm tragend;
-6 mm Stahlstange;
- Stahlblech 2 mm dick;
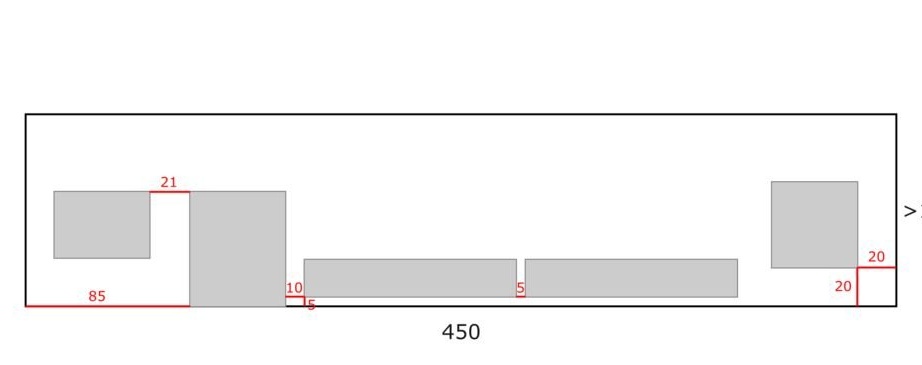
-Holzplatte für die Basis 450x100 mm;
- Schraubendreher;
-Gon;
Erster Schritt: Wie es funktioniert
Schauen wir uns an, wie die Maschine funktioniert (von rechts nach links).
Spulenhalter - hält die Drahtspule für die Bearbeitung der Maschine.
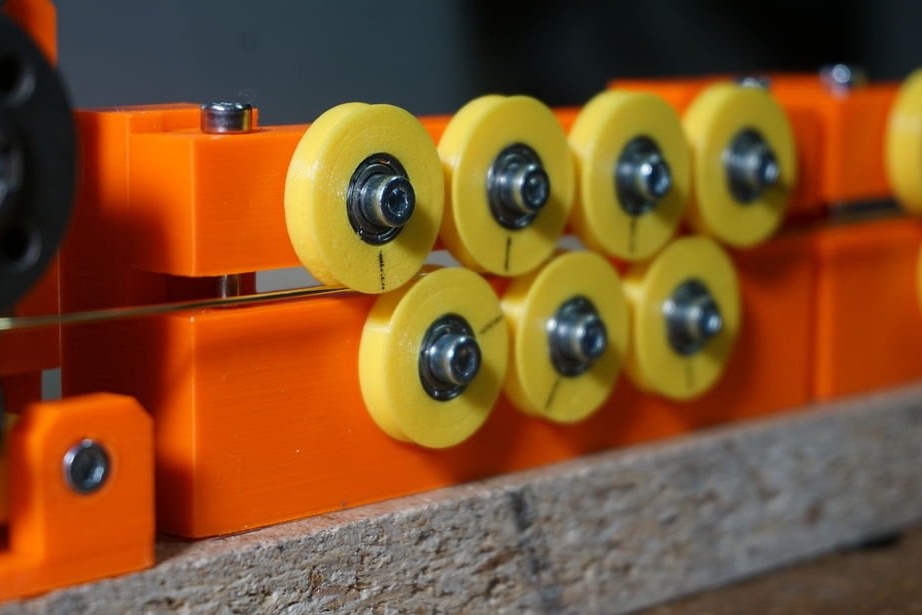
Gleichrichter - ein Satz von 7 Rollen, damit der Draht so gleichmäßig wie möglich ist. Die Arbeit mit geraden Drähten ist entscheidend. Deshalb zwei Gleichrichter.
Broach - Sie finden einen ähnlichen Mechanismus in Ihrem 3D-Drucker. Ein Satz Zahnräder zieht den Draht von der Rolle durch die Rollen und drückt ihn zum Biegekopf. Der Vorschubmechanismus muss einen ausreichenden Drahtdruck haben, damit er nicht verrutscht. Dazu später mehr.
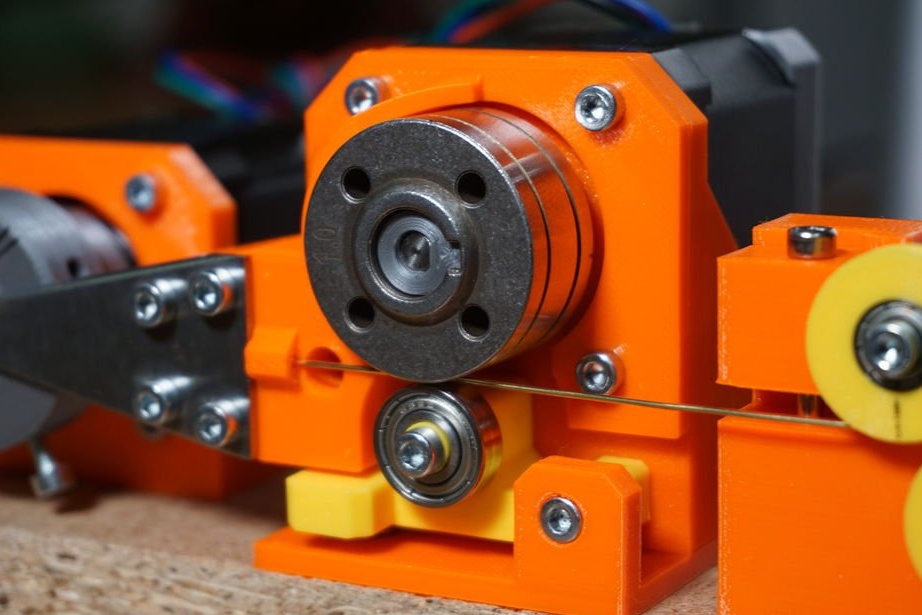
Biegemaschine - biegt den Draht in eine programmierte Form.
All dies wird von einem Arduino UN mit CNC-Abschirmung gesteuert.Ein Befehl wird vom Computer an den Arduino gesendet und übersetzt ihn in Befehle für Schrittmotoren.

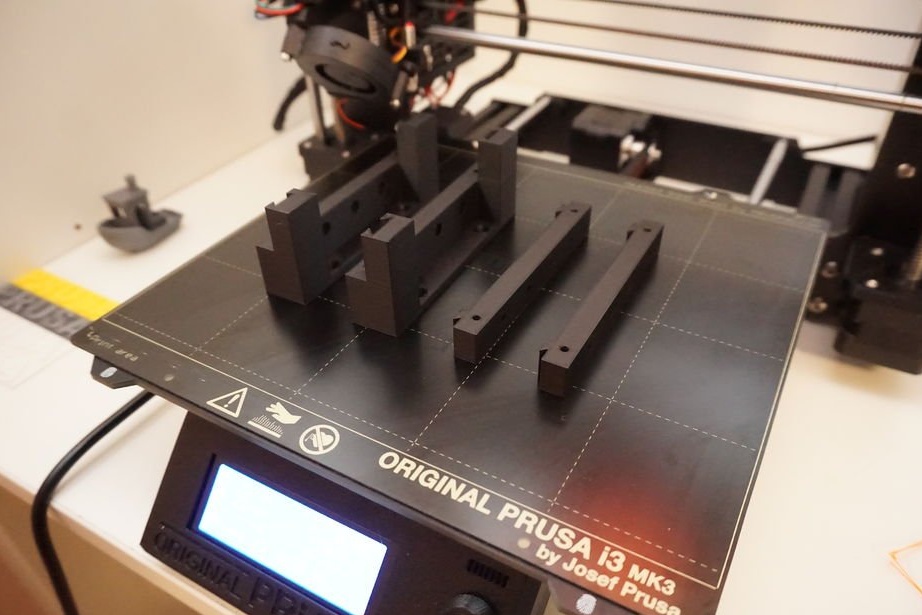
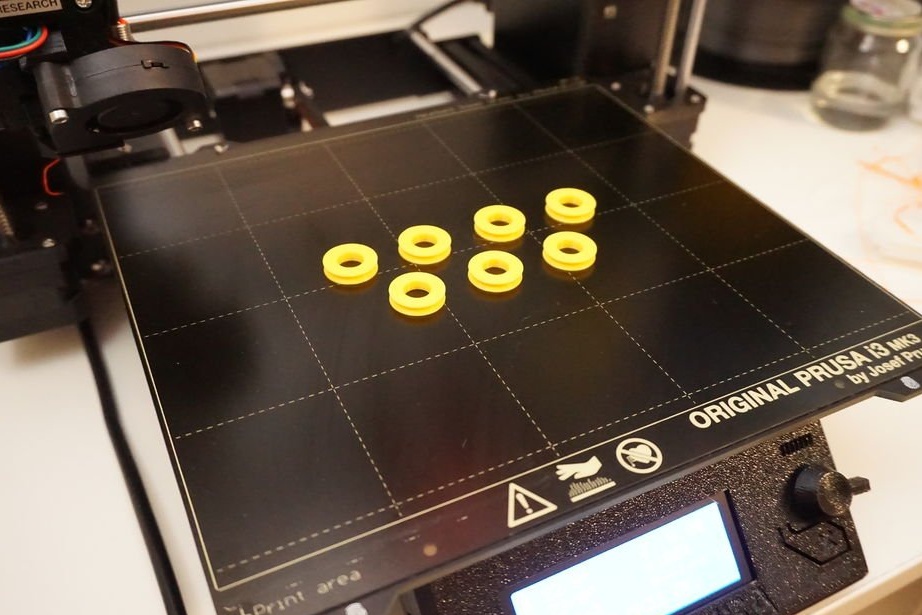
Schritt zwei: Teile drucken
Sie müssen die folgenden Details und in der folgenden Menge drucken (um Verwechslungen zu vermeiden, den Originaltext):
Bender
Werkzeugkopf
Motorrahmen
Feeeder
Motorrahmen
Unterer Rahmen
Drahtführung
Leerlaufgetriebe
Distanzstück für Leerlaufrad
Distanzstück für Vorschubgetriebe
Biegeplatte (Schablone)
Richtwalzen (2x)
Bettrahmen (2x)
Oberer Zahnradrahmen (2x)
Walze (14x)
Spulenhalter
Schichthöhe beim Drucken 0,15 mm. 40% Füllung. Der Druck dauert 2 Tage.
Schritt drei: Biegemaschine
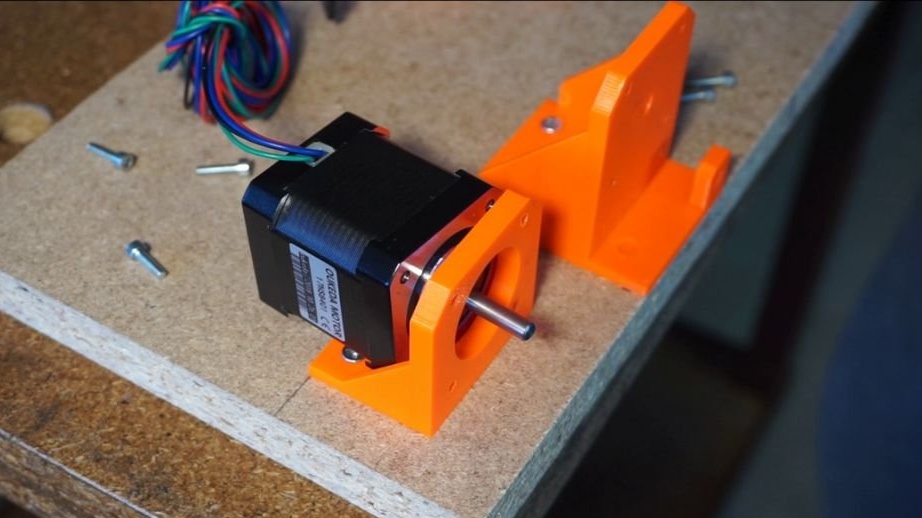
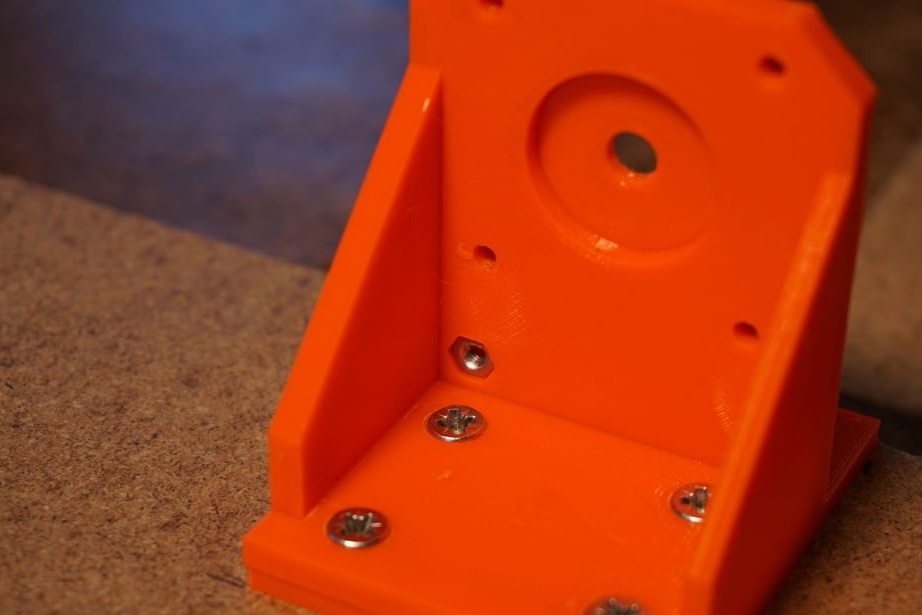
Der Master schraubt zwei Rahmen an die Basis. Es ist wichtig, beide Rahmen wie in der Zeichnung gezeigt zu installieren.
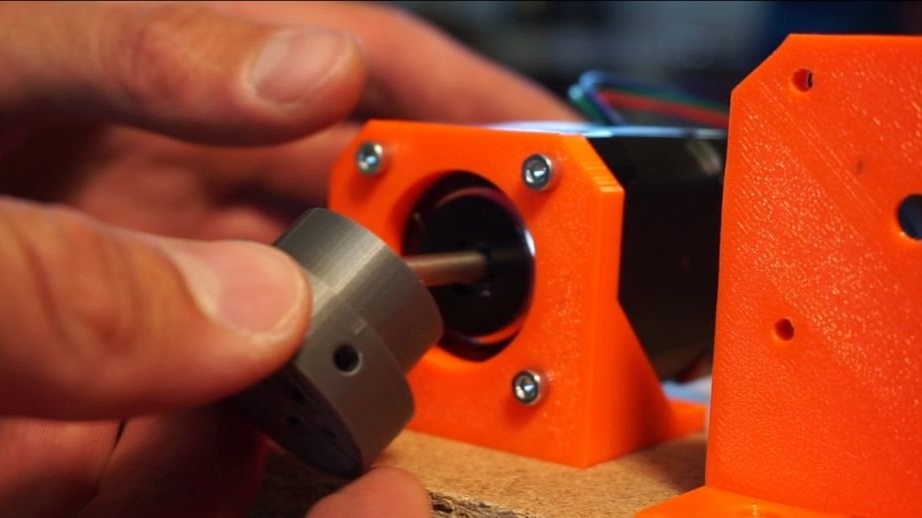
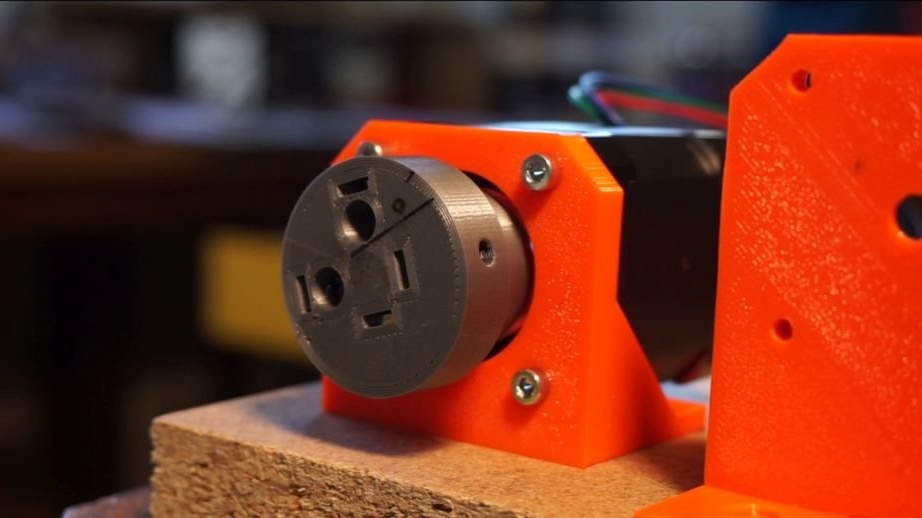
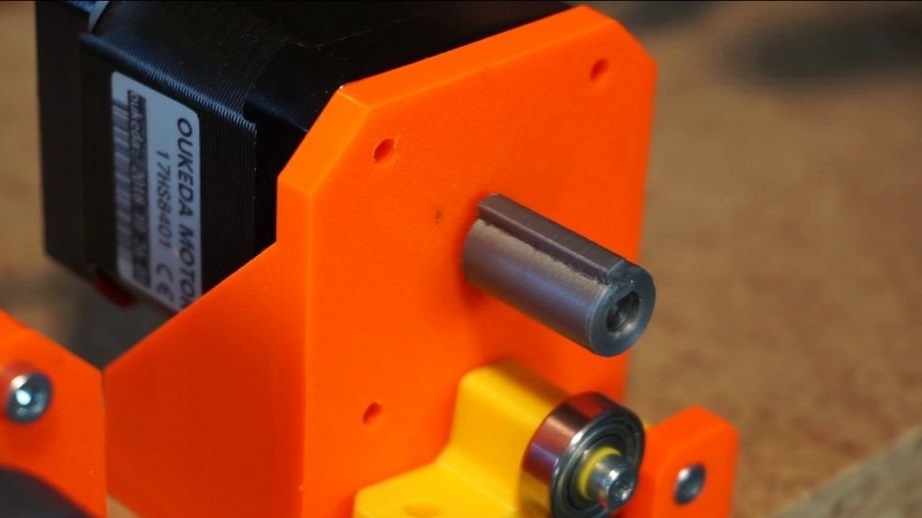
Sichert den Schrittmotor am Rahmen. Sichert den Kopf an der Motorwelle.


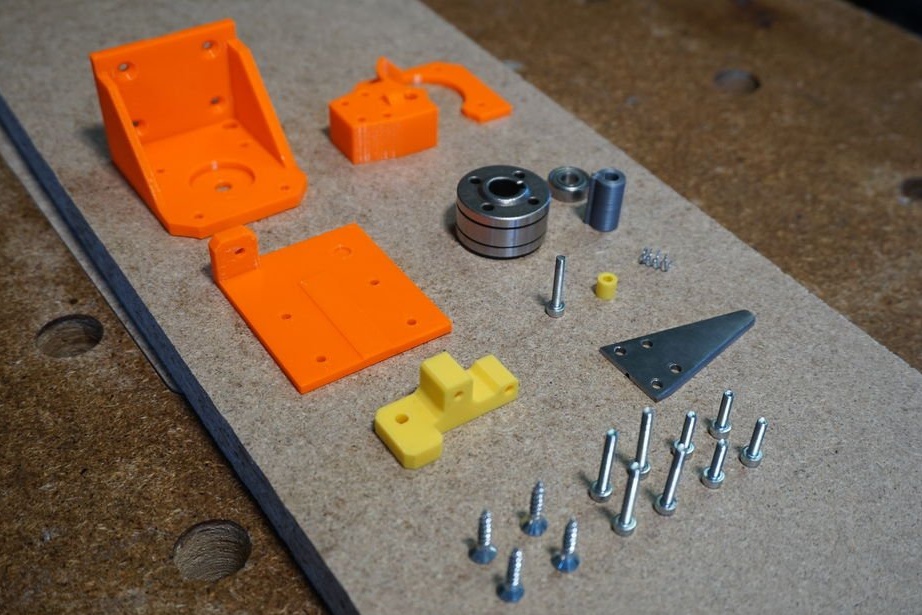
Schritt vier: Brosche
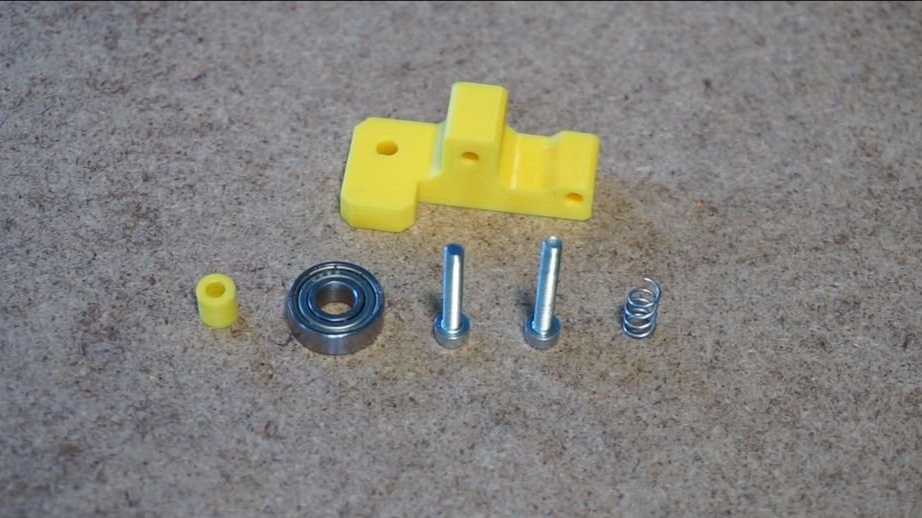
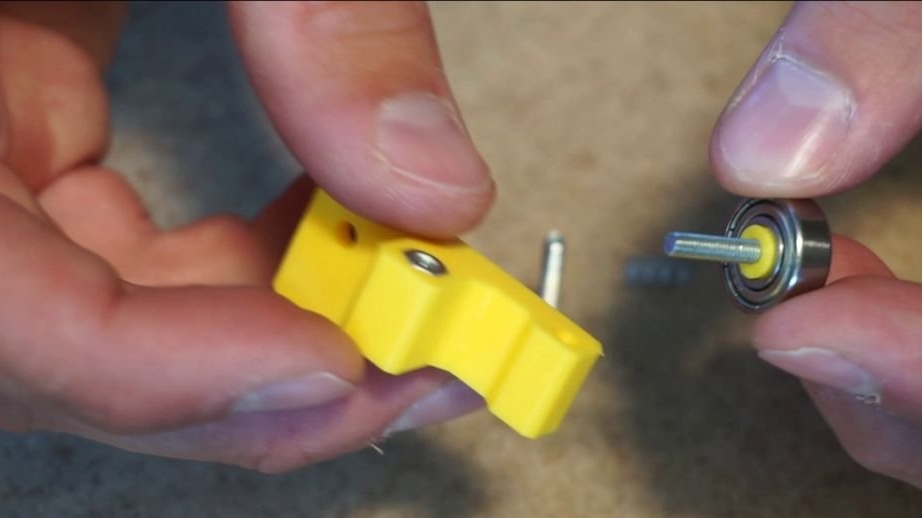
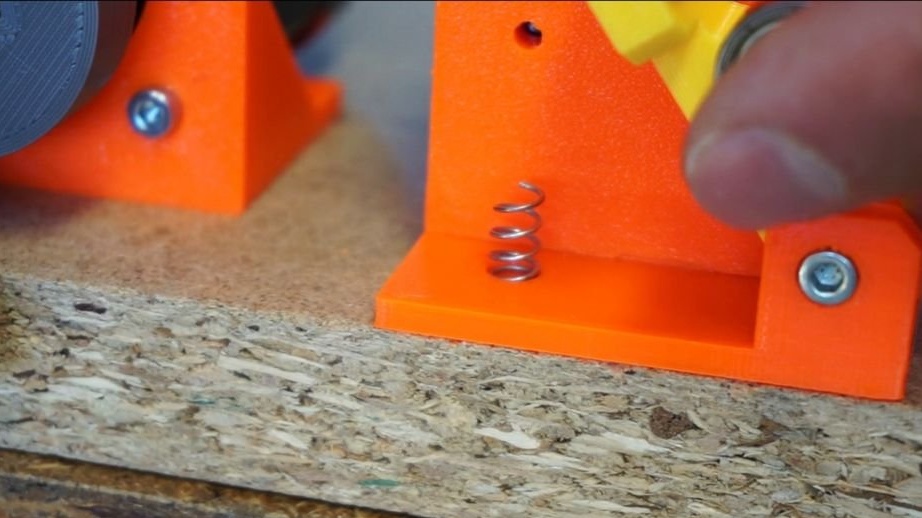
Der Rahmen ist bereits installiert. Der erste Schritt bei der Erstellung eines Vorschubmechanismus besteht darin, einen Schlitten für das Zwischenrad zu bauen, der den Draht zum Vorschubmechanismus drückt. Entfernen Sie die Kunststoffdichtung im 6x15x4 mm Lager. Installieren Sie das Lager an der Schraube M3x20. Setzen Sie die M3-Mutter in den Schlitten ein und schrauben Sie das Lager auf die Schraube. Stellen Sie sicher, dass sich das Lager frei dreht. Setzen Sie die zweite M3-Mutter in den Motorrahmen ein (Motorseite in der unteren linken Ecke) und schrauben Sie den Schlitten mit der M3x20-Schraube durch die kleine Halterung. Ziehen Sie die Schraube nicht zu fest an, da sich der Schlitten frei bewegen muss. Heben Sie den Schlitten an und setzen Sie die Feder in das darunter liegende Loch ein.
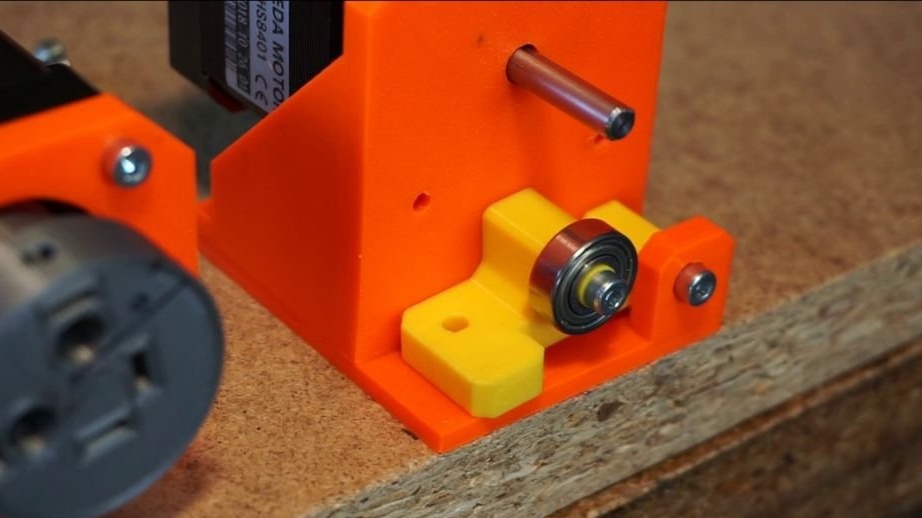
Nehmen Sie den zweiten Schrittmotor und bauen Sie ihn in den Motorrahmen ein. Noch nicht verschrauben. Drücken Sie den Abstandshalter des Vorschubmechanismus auf die Motorwelle und installieren Sie den Vorschubmechanismus.
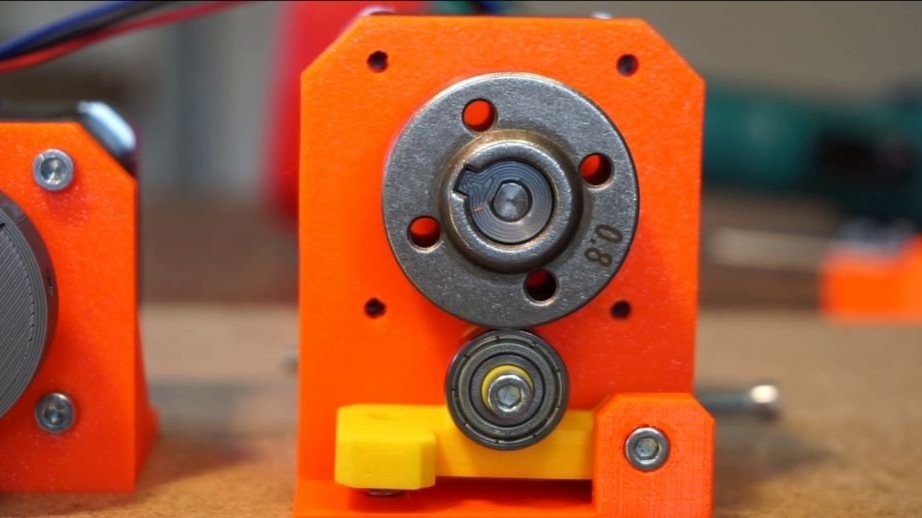
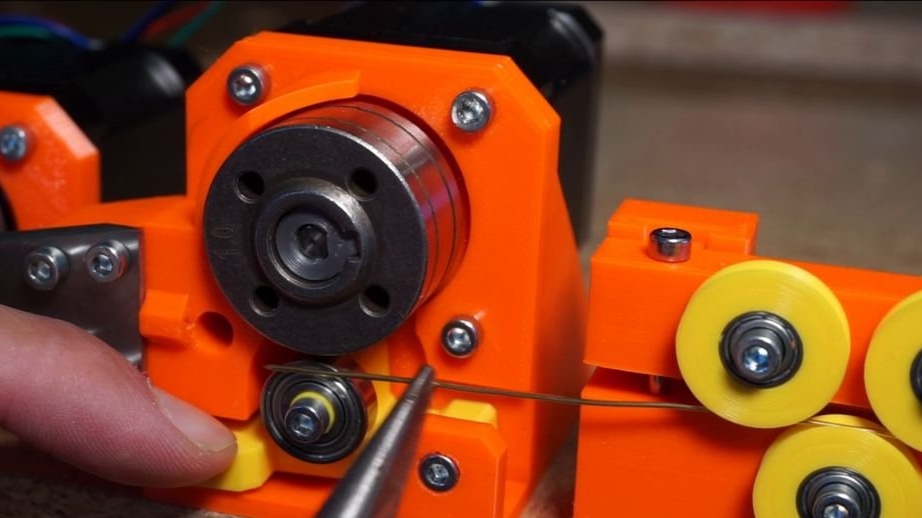
Der vom Master verwendete Vorschubmechanismus stammt von einem MIG-Schweißgerät. Der Mechanismus hat zwei Aussparungen an der Spule. Eine für 0,8 mm Draht und eine für 1 mm Draht. Im Gegensatz zu Zahnrädern (zuvor hat der Master versucht, den Draht mit ihnen zu versorgen) hinterlässt dieser Mechanismus keine Spuren auf dem Draht.
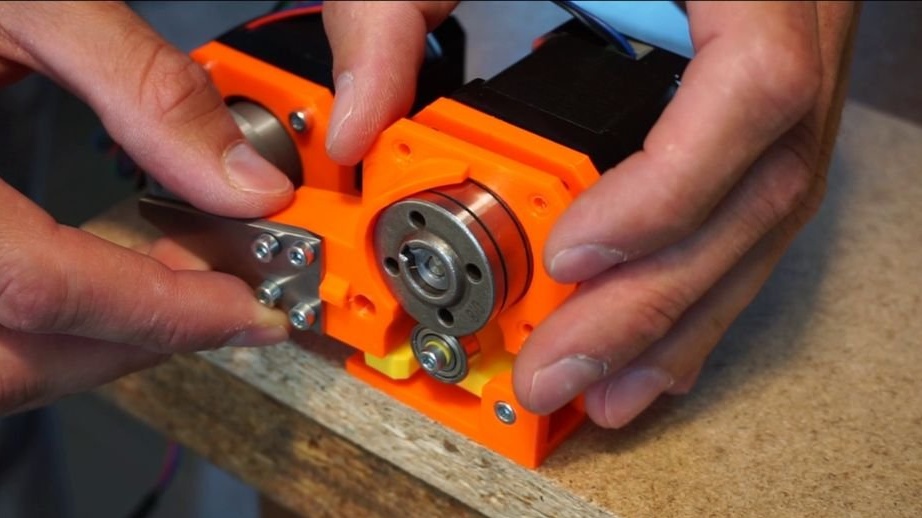
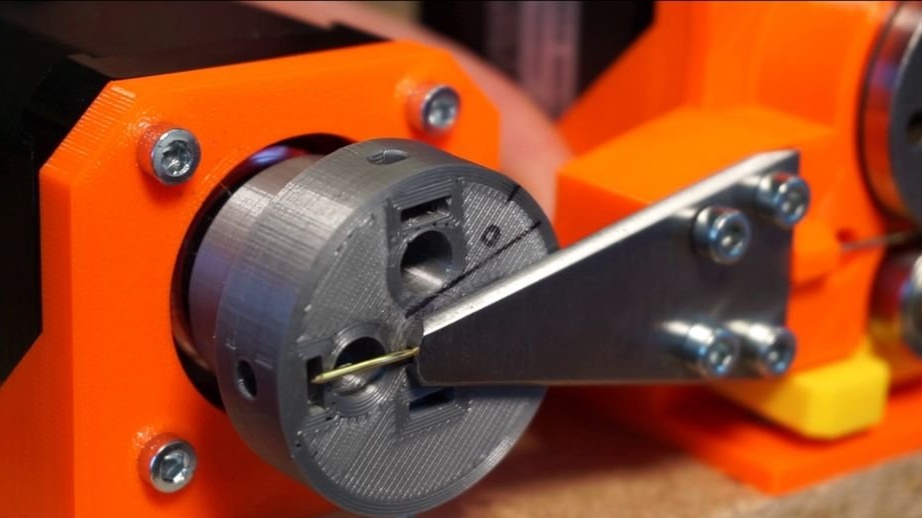
Der Vorschub und die Biegevorrichtung sind durch eine Biegeplatte verbunden - eine 2 mm dicke Metallplatte mit einer kleinen Nut an der Rückwand, die den Draht zum perfekten Biegen direkt in die Mitte des Biegekopfs führt. Zum Drucken gibt es eine Kunststoff-Biegeplatte, die hervorragend funktioniert, sich jedoch schnell abnutzt und häufig ausgetauscht werden muss. Sie können es verwenden oder eine Metallplatte darauf herstellen.
Nehmen Sie als nächstes das Kunststoffteil der Drahtführung und bringen Sie die vier M3-Muttern in den Löchern auf der Rückseite an. Schrauben Sie nun die Biegeplatte mit den M3x20-Schrauben fest. Platzieren Sie die Drahtführung vor dem Motorrahmen des Vorschubmechanismus und befestigen Sie sie mit vier M3x12-Schrauben am Motor. Passen Sie die Position der Biegeplatte an. Es sollte genau in der Mitte des Biegekopfes sein.
Die Brosche ist fertig. Wenn Sie einen geraden Draht haben, können Sie den Draht jetzt verwenden. Ansonsten benötigen Sie einen Gleichrichter.





Fünfter Schritt: Brosche
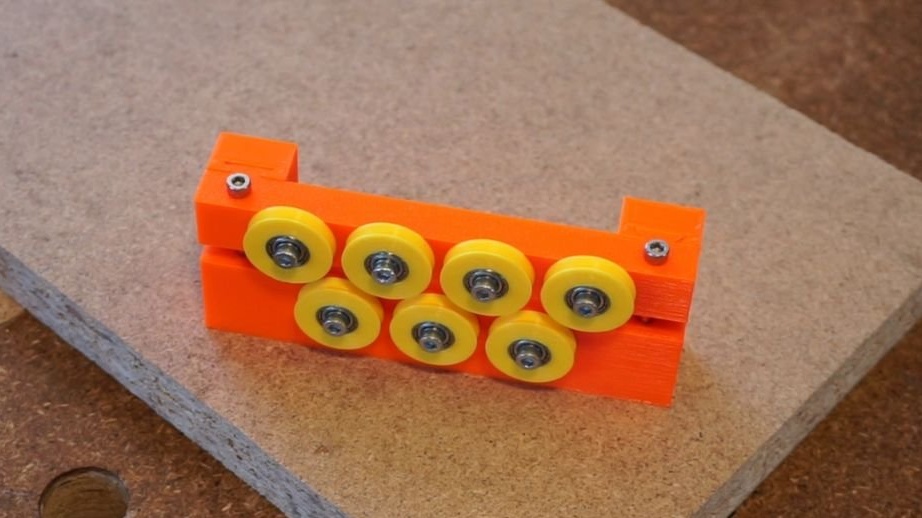
Der Draht wird normalerweise in Spulenform geliefert. Um den Draht zu biegen, müssen Sie ihn zuerst begradigen. Der Gleichrichter besteht aus 7 Rollen (4 oben und 3 unten), die gegeneinander gedrückt werden können, um die korrekte Spannung des Drahtes sicherzustellen. Es verhindert auch ein Verdrehen des Drahtes während des Biegens.
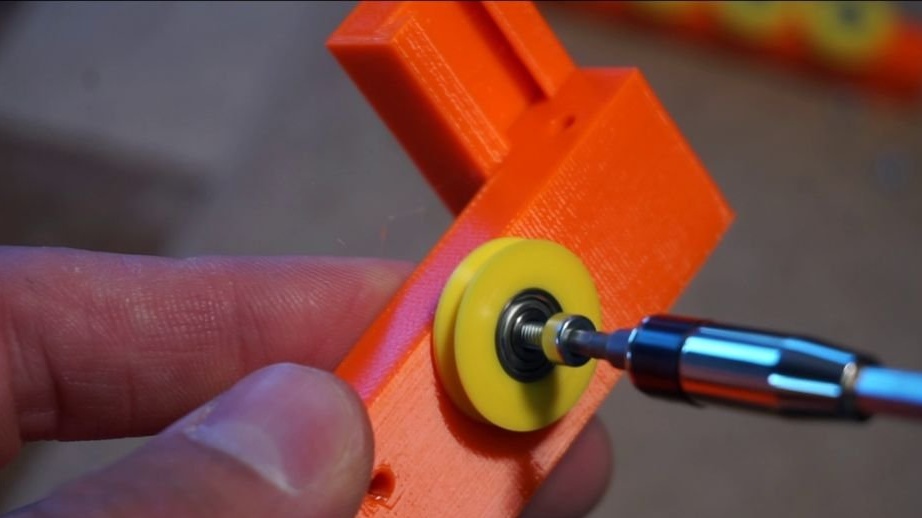
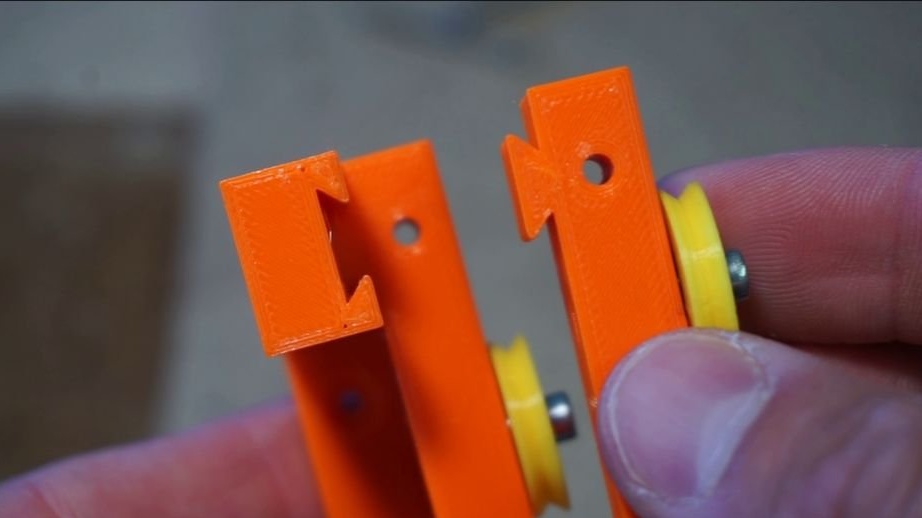
Starten Sie die Montage mit den Rollenrollen. Zuerst müssen Sie das Lager 3x10x4 mm in das Kunststoffrollengehäuse drücken. Setzen Sie die M3x12-Schraube auf einer Seite und die M3-Unterlegscheibe auf der anderen Seite der Walze ein. Die Unterlegscheibe verhindert die Reibung des Rades am Rahmen. Schrauben Sie alle Rollen an den unteren und oberen Rahmen. Verbinden Sie beide Frames. Befestigen Sie die Rahmen mit zwei M3x40-Schrauben.
Sie können etwas Geld für Rollenlager sparen. Drucken Sie den Teil Straightener_RollerNoBearing anstelle des Teils Straightener_Roller. Aber die Leistung wird etwas schlechter sein.
Verwenden Sie für noch bessere Ergebnisse 2 Glätteisen hintereinander.




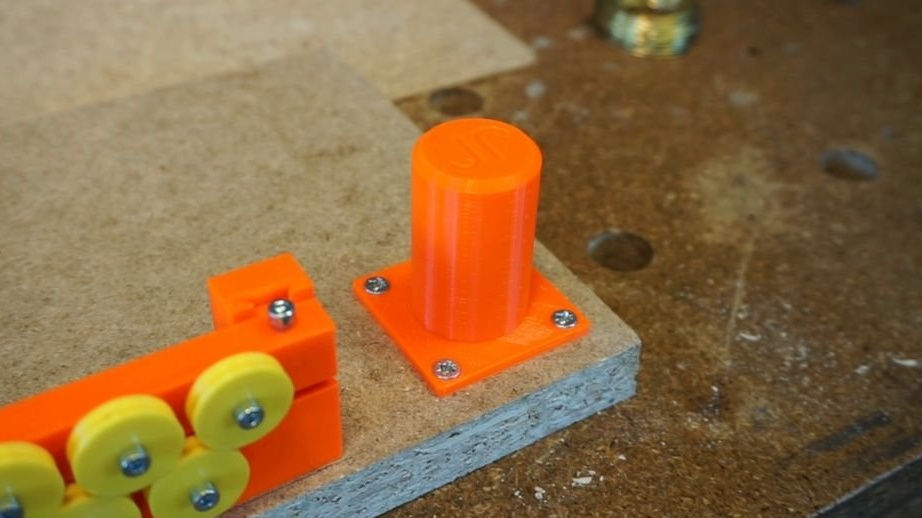
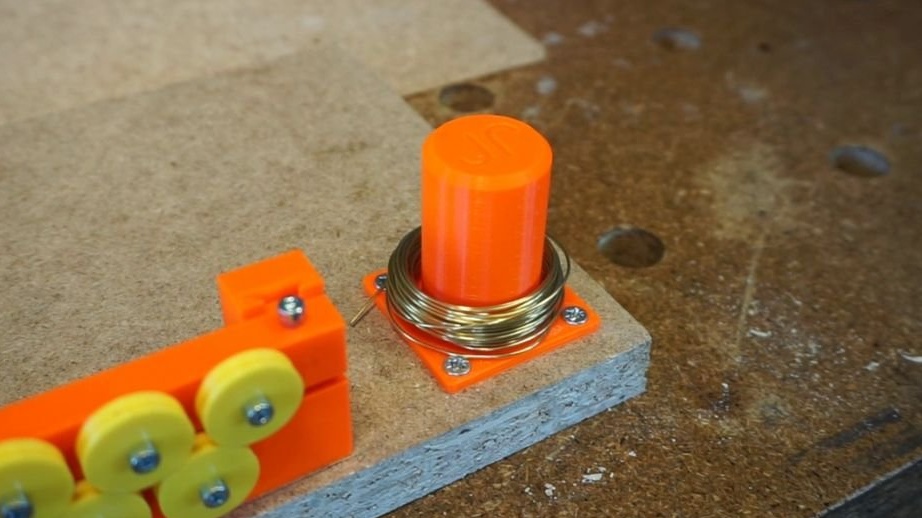
Schritt Sechs: Spulenhalter
Der Spulenhalter ist ein einfacher Zylinder, der den Draht hält und es ihm ermöglicht, sich von der Spule abzuwickeln. Schrauben Sie es mit vier 3x16 Schrauben an der Basis fest.
Schritt sieben: Verbinden
Zunächst muss der Biegedraht der Maschine zugeführt werden. Der Master verwendet 0,8-1 mm Messingdraht in Form einer Spule.
Der Draht geht von der Spule durch die Rollen. Stecken Sie einfach den Draht zwischen die Rollen. Dann geht sie durch die Brosche.Stellen Sie die Position des Vorschubmechanismus so ein, dass die Rinne bündig mit der Oberfläche der Drahtführung abschließt. Drücken Sie den Hebel im Zwischenrad und schieben Sie den Draht durch die Zuführung zur Biegeplatte. Lassen Sie den Hebel los und lassen Sie ihn gegen den Vorschubmechanismus drücken. Sie können jetzt den Vorschubmechanismus manuell scrollen, um den Draht zum Biegekopf zu drücken. Stellen Sie die Spannung an den Rollen vorsichtig ein, indem Sie die Schrauben festziehen. Die Rollen sollten sich nicht frei drehen, aber der Draht sollte sich reibungslos bewegen.
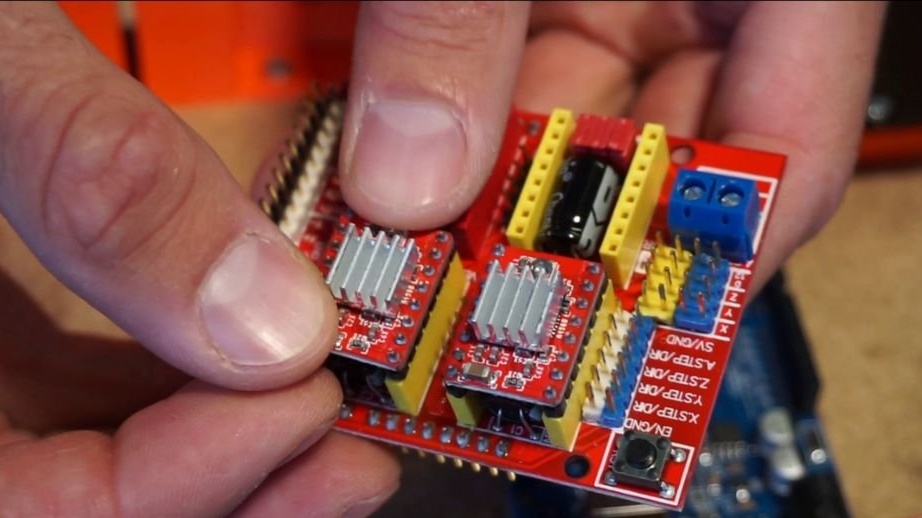
Zweitens, Elektronik Die Steuerung muss ebenfalls angeschlossen sein. Der Master verwendet den klassischen Arduino UNO mit CNC und zwei Schrittmotortreibern A4988. Der Vorschubmotor ist mit der Z-Achse und der Biegekopfmotor mit der X-Achse verbunden. Die Treiber sind für die höchstmögliche Genauigkeit konfiguriert - alle 3 Jumper unter den Stufentreibern sind eingesetzt. Alles sollte an eine 12V 3A Stromversorgung angeschlossen werden.

Schritt acht: Firmware
Jetzt können Sie versuchen, die Maschine zu starten. Master verwendet GRBL zusammen mit cncjs. Sie sind für die Arbeit mit einer Fräsmaschine ausgelegt, eignen sich jedoch hervorragend für jede Art von CNC. GRBL ist die Firmware, die Sie in Arduino UNO installieren müssen. Es gibt einen guten cncjs-Webclient zum Einstellen von Parametern. Installieren Sie GRBL auf Arduino und cncjs auf Ihrem Computer.
Nach der Installation müssen Sie eine Verbindung zum Gerät herstellen und dessen Funktion überprüfen, indem Sie die Tasten Z +/- oder X +/- drücken.
Jetzt müssen Sie kalibrieren: 10 mm = Z10 $ 102 = 34 $ 110 = 1600 $ 111 = 600 $ 112 = 1000 $ 120 = 500 $ 121 = 350 $ 122 = 350
Dies ist eine Reihe von Werten, die bestimmen, wie die im Code angegebene Zahl in Motorbewegung umgewandelt wird. Wenn Sie beispielsweise die Z-Achse auf 30 einstellen, bedeutet dies, dass er 30 mm Draht durch die Zuführung schiebt.
Wir haben die Kalibrierung herausgefunden. Jetzt müssen Sie den Biegekopf auf die Nullposition stellen.
Die Bewegung des Biegekopfes wird durch die bekannte feste Position des Biegekopfes bestimmt. In diesem Fall ist dies die Position, in der der Biegestift am Kopf nach links zeigt. Siehe das Foto.
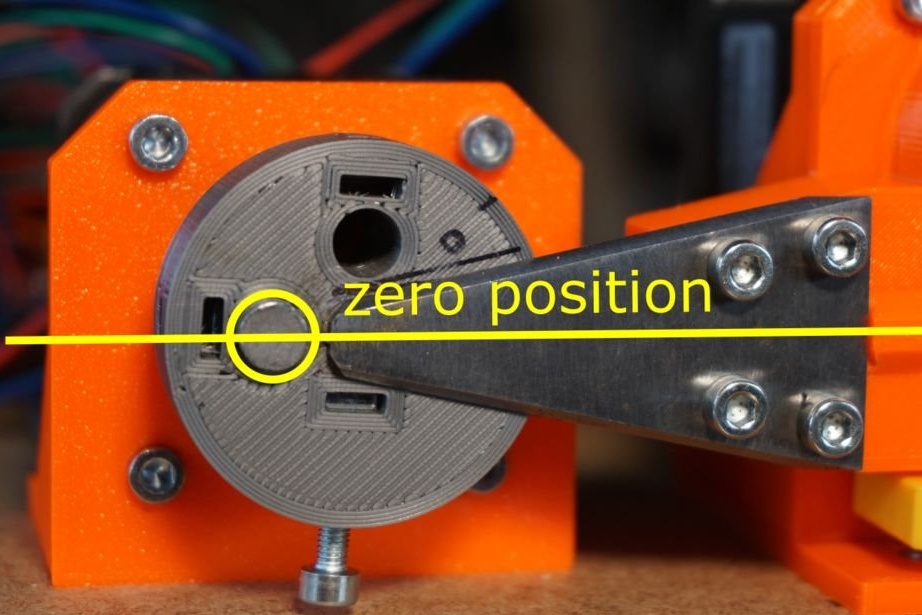
Es ist ratsam, diese Nullposition am Kopf zu notieren, um sie wieder in dieselbe Position bringen zu können. Der Vorschubmechanismus muss die Nullposition nicht bestimmen, da er sich immer relativ zur aktuellen Position bewegt.
Schauen wir uns nun ein Gcode-Beispiel an. Es sieht so aus:
G91
G1 Z1
G90
G1 X2
G1 X-6Und hier ist, wofür jeder Wert geschrieben ist:
G91 - Relative Koordinaten verwenden (erforderlich vor jeder Bewegung entlang der Z-Achse)
G1 Z1 - 1 mm Draht einführen
G90 - Verwenden Sie absolute Koordinaten (erforderlich vor jeder Bewegung entlang der X-Achse)
G1 X2 - Biegekopf auf Position 2 drehen (diese Nummer hat keine Einheiten)
G1 X-6 - Drehen Sie den Biegekopf auf Position -6
Wenn Sie die Schritte 100 Mal wiederholen, erhalten Sie einen Federbiegecode. Weitere Quelldateien finden Sie unten.
hex-inner.gcode
hex-äußere.gcode
spring.gcode
Die Maschine ist bereit. Aber der Meister wird immer noch daran arbeiten, es zu verbessern.
Der gesamte Herstellungsprozess einer solchen Maschine ist im Video zu sehen.