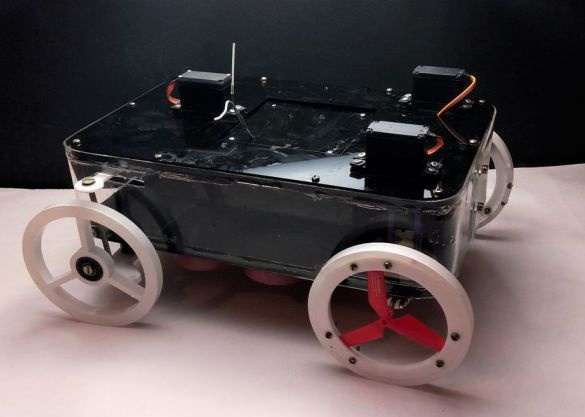



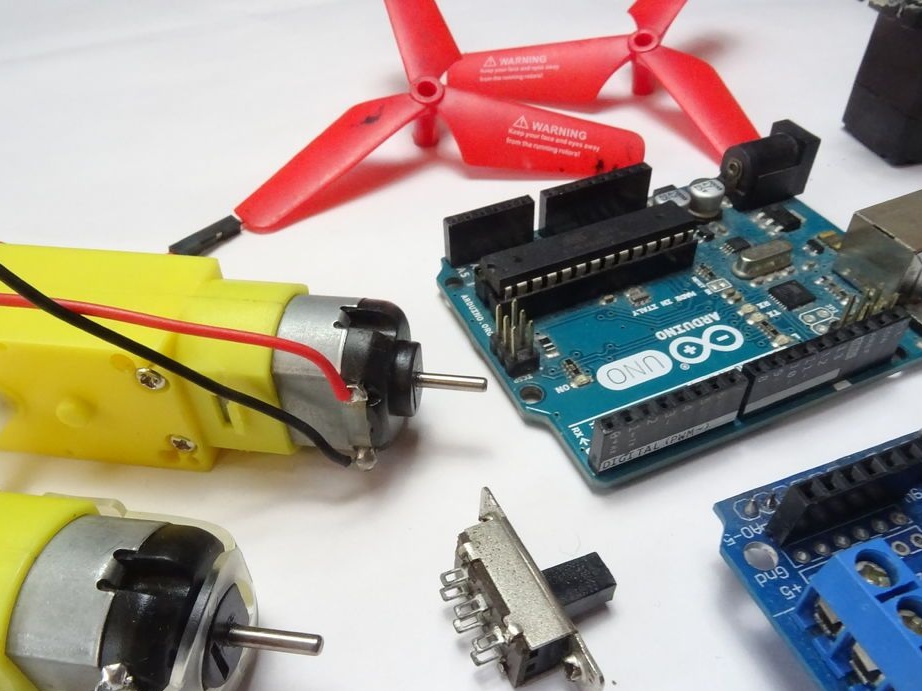
In diesem Artikel betrachten wir die Herstellung eines Geländewagens durch einen indischen Handwerker, der sich sowohl an Land als auch auf dem Wasser bewegt. Geländewagen besteht aus einer schwimmenden Plattform mit Rädern und einem Propeller. Mechanismen werden per Fernbedienung über gesteuert Arduino UNO.
Werkzeuge und Materialien:
-
-AKB 9V;
-Schalter;
-Acryl;
-Sperrholz;
(Bezug nehmend ist das Lager 8 x 16 x 5 mm, der Autor gibt 8 * 22 mm an)
-Zwei Propeller;
-Fasteners;
-Floats;
-Kleberpistole;
-Super Kleber;
Epoxidharz;
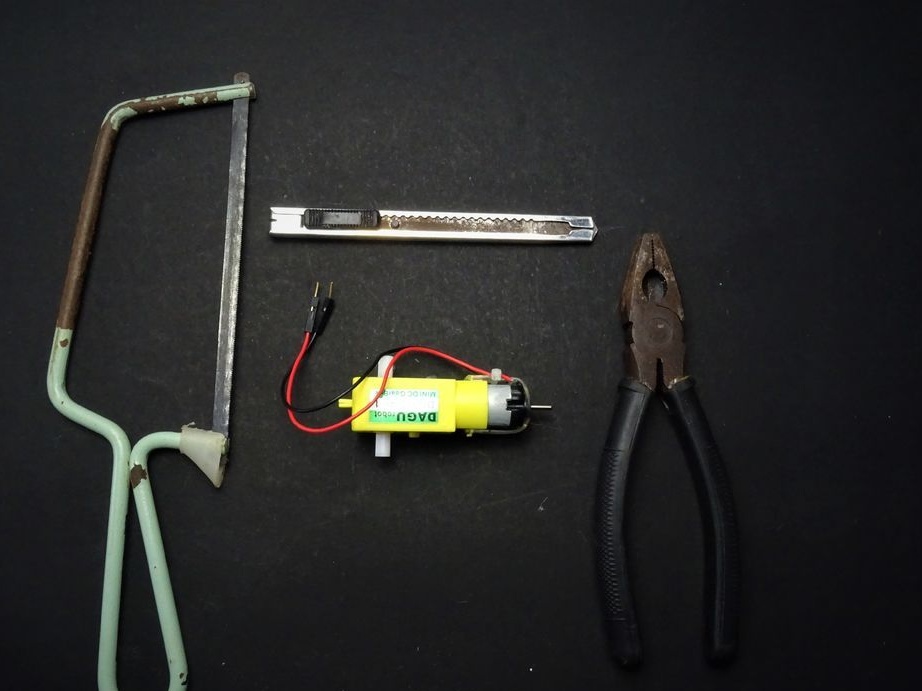
-Lötkolben;
-Drill;
-Laser Cutter;
-Säge;
- Schraubendreher;
-Drill;
-Lötkolben;
-Board;
-Computer mit Software;


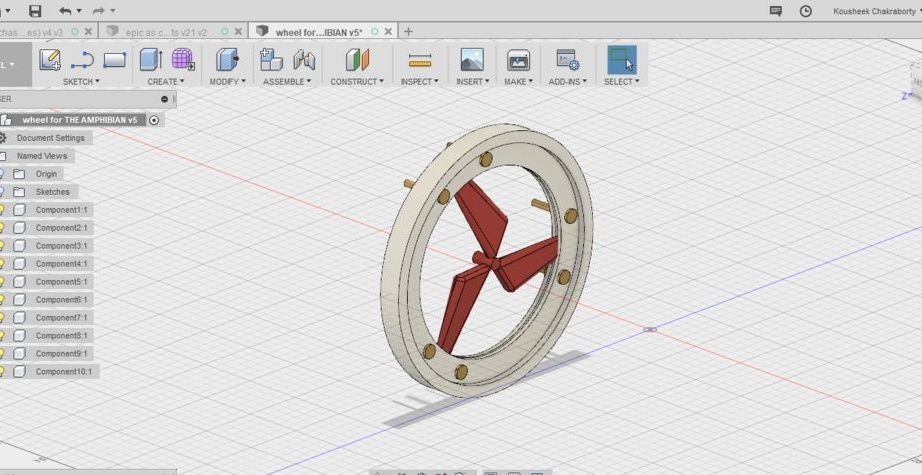
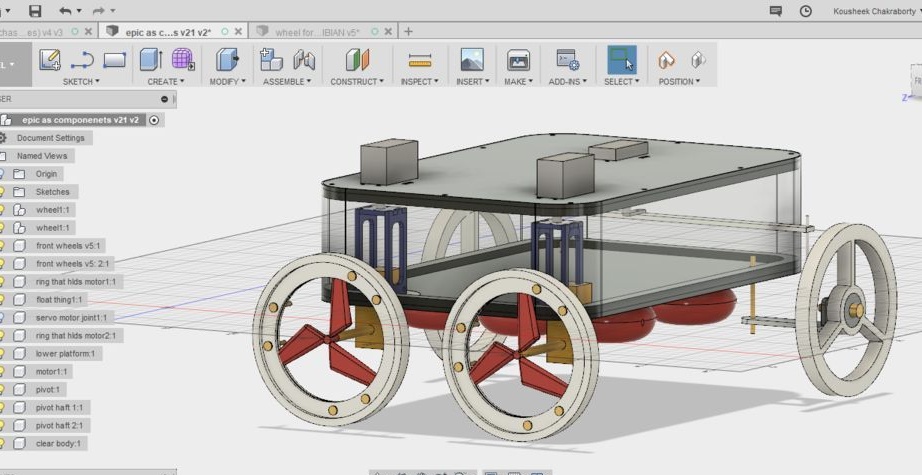
Erster Schritt: Design
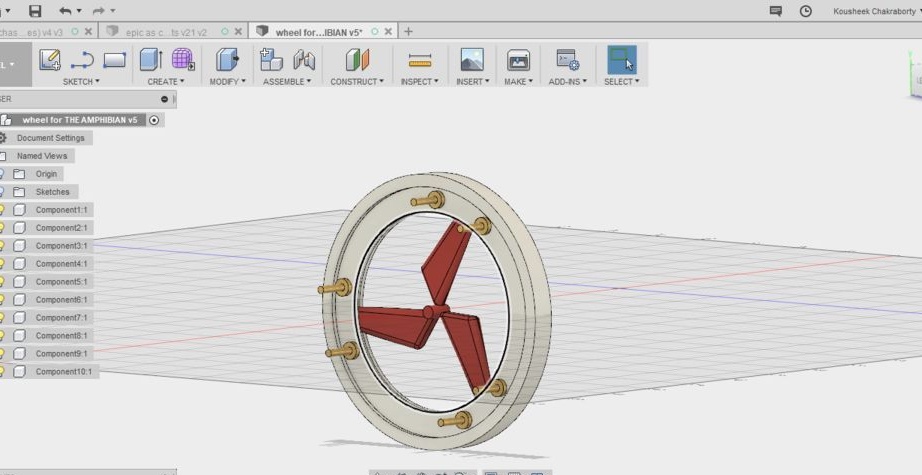
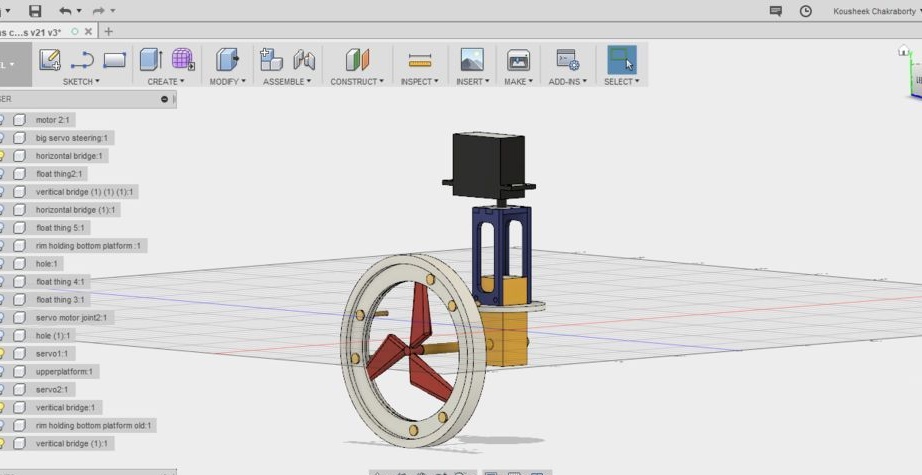
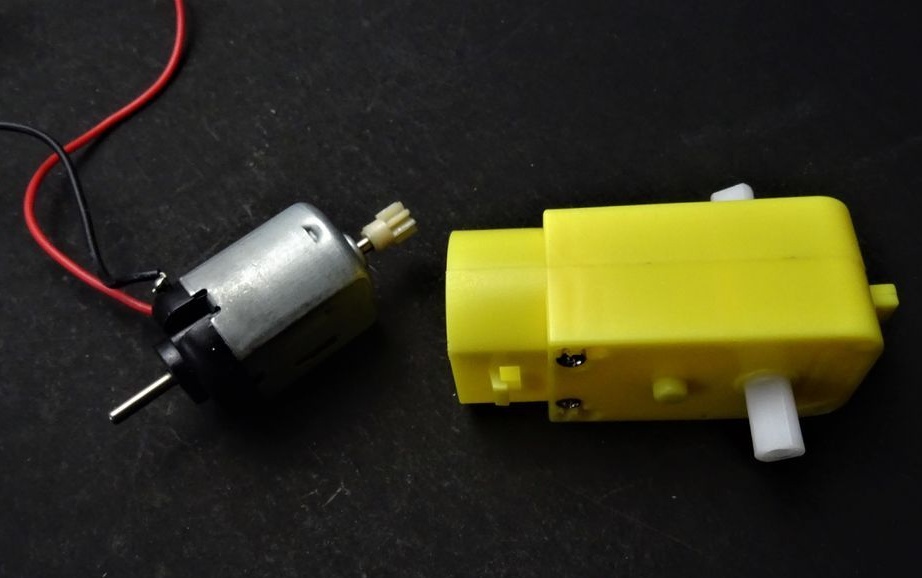
Um das Projekt zu erstellen, verwendeten die Meister das Fusion 360-Programm. Die ganze Schwierigkeit bestand darin, Bewegung an Land und im Wasser zu kombinieren. Bei der Konstruktion der Räder entwickelten die Meister ein System, bei dem sich die Schrauben im Wasser öffnen würden. Angesichts der Komplexität der Konstruktion integrierten sie jedoch einfach die Propeller aus dem Kinderspielzeug in das Rad. Dadurch können die Räder das Geländewagen an Land bewegen, und wenn sie ins Wasser gelangen, werden die Schrauben eingeschaltet.
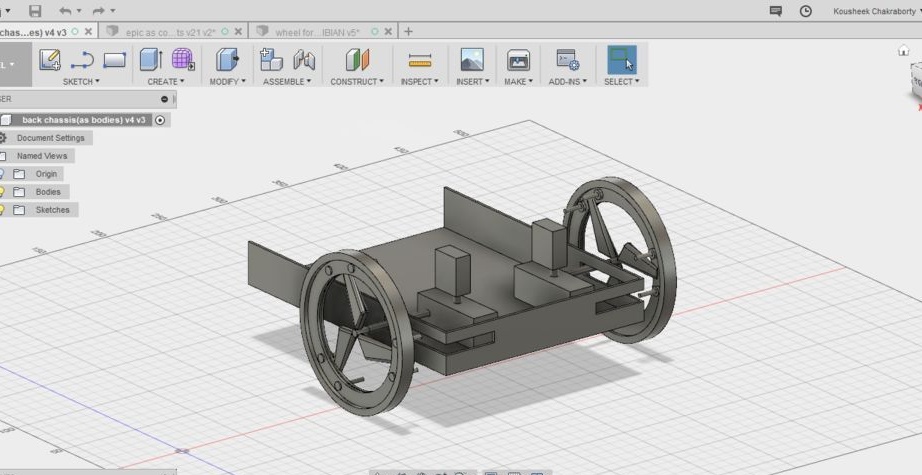
Um diese Idee umzusetzen, müssen Sie in der Lage sein, die Hinterräder beim Fahren auf dem Wasser senkrecht zum Geländewagen zu drehen. Dies wurde möglich, als Motorgetriebe aus dem Rahmen genommen wurden. Kunststoffgetriebe und eindringendes Wasser schaden nicht.
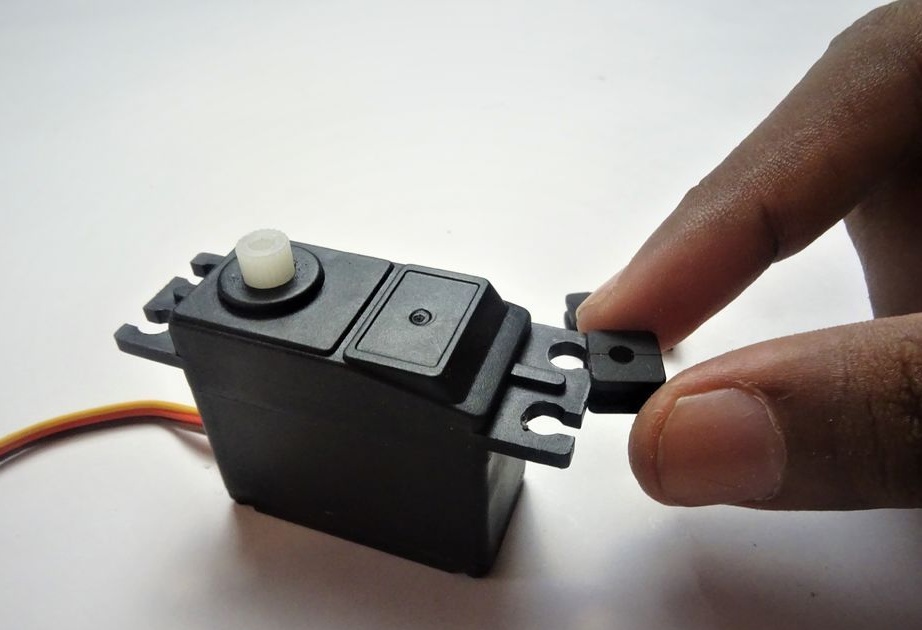
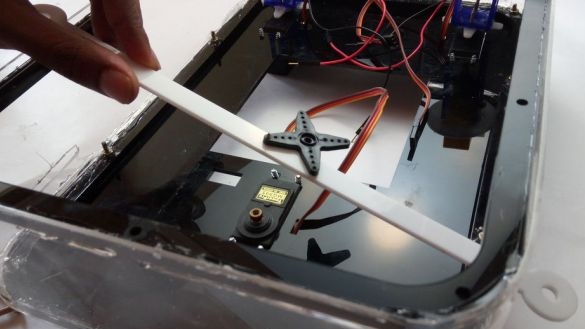
Die Drehung der Radschrauben erfolgt mit einem Servoantrieb.
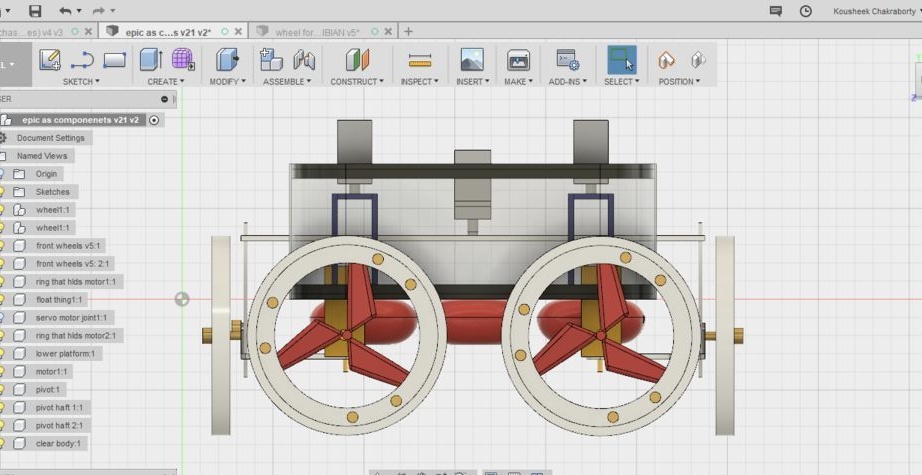
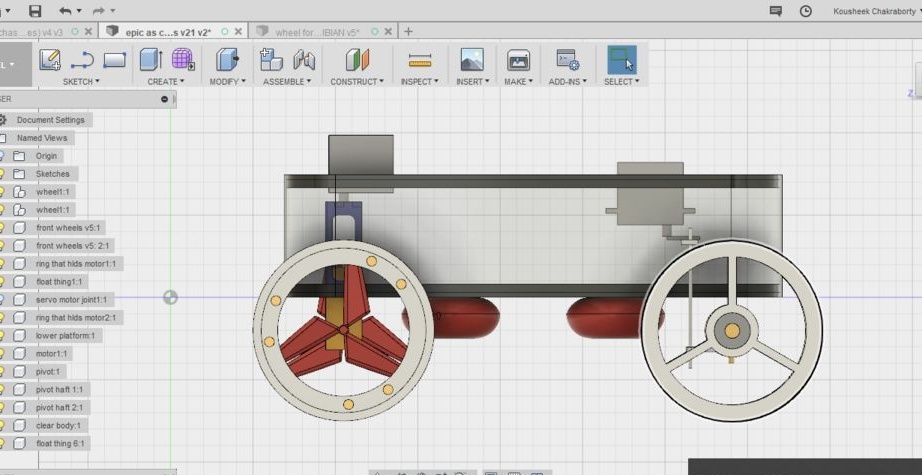
Das Geländewagen verfügt über zwei Drehmechanismen. Einer zur Steuerung der Hinterräder der Propeller im Wasser und der zweite zur Steuerung über Land steuert die Vorderräder. Der Drehwinkel der Vorderräder beträgt 35 Grad, wodurch Sie scharfe Kurven fahren können.
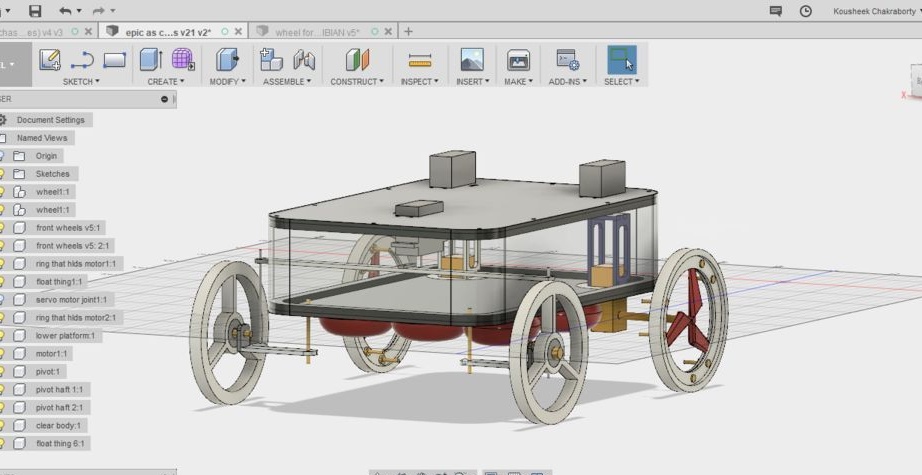
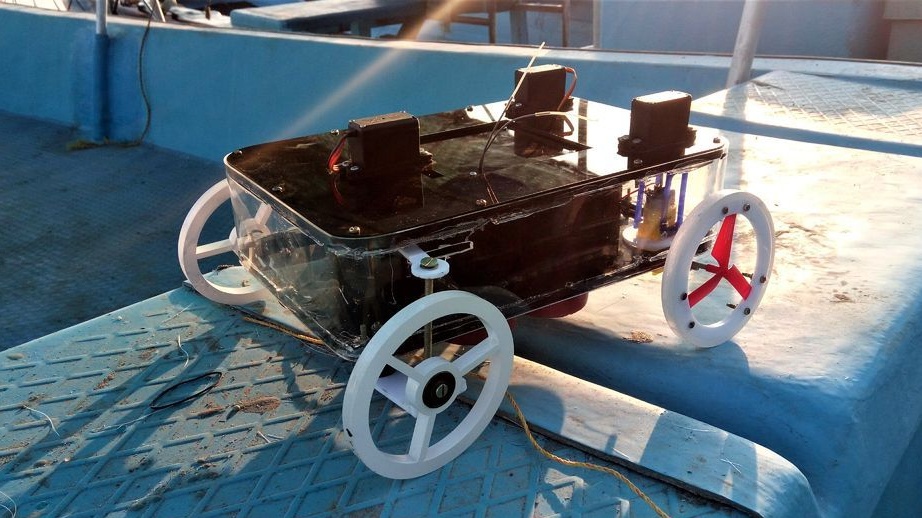
In den Bildern unten sehen Sie die Transformation des Geländewagens beim Bewegen durch Land und Wasser.
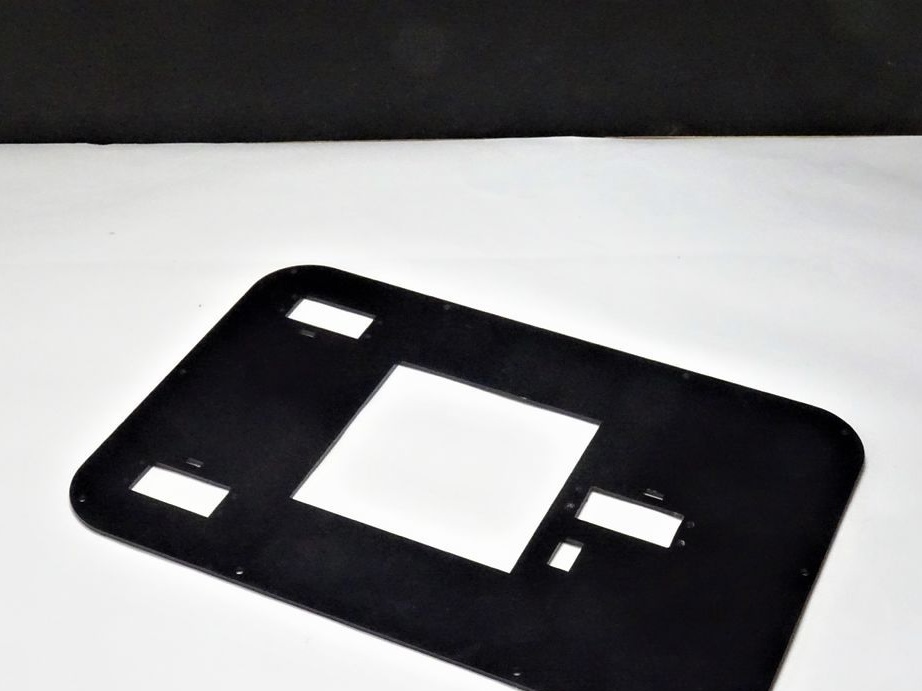
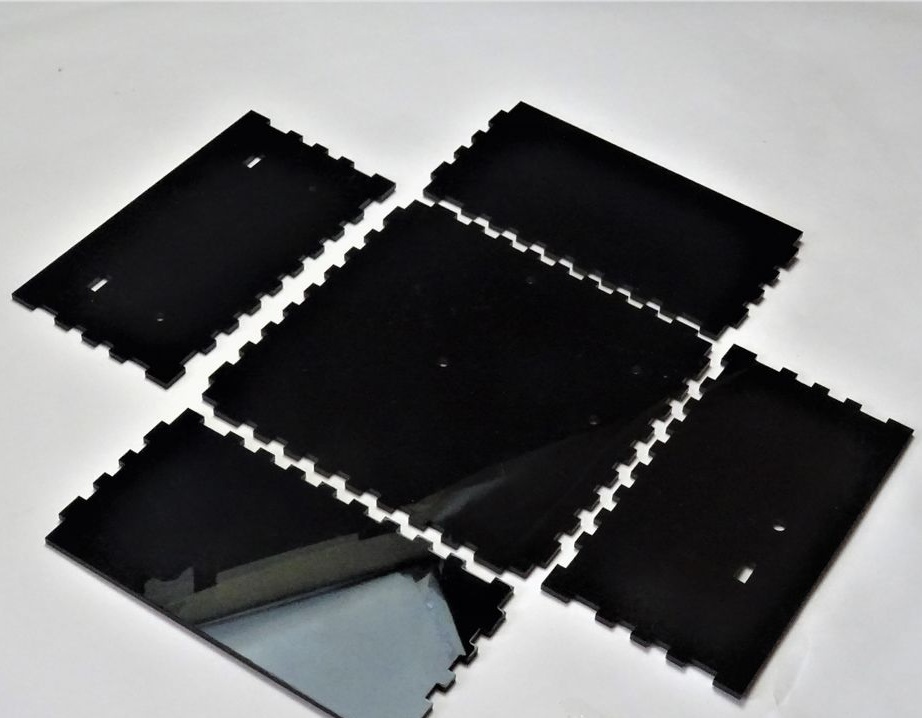
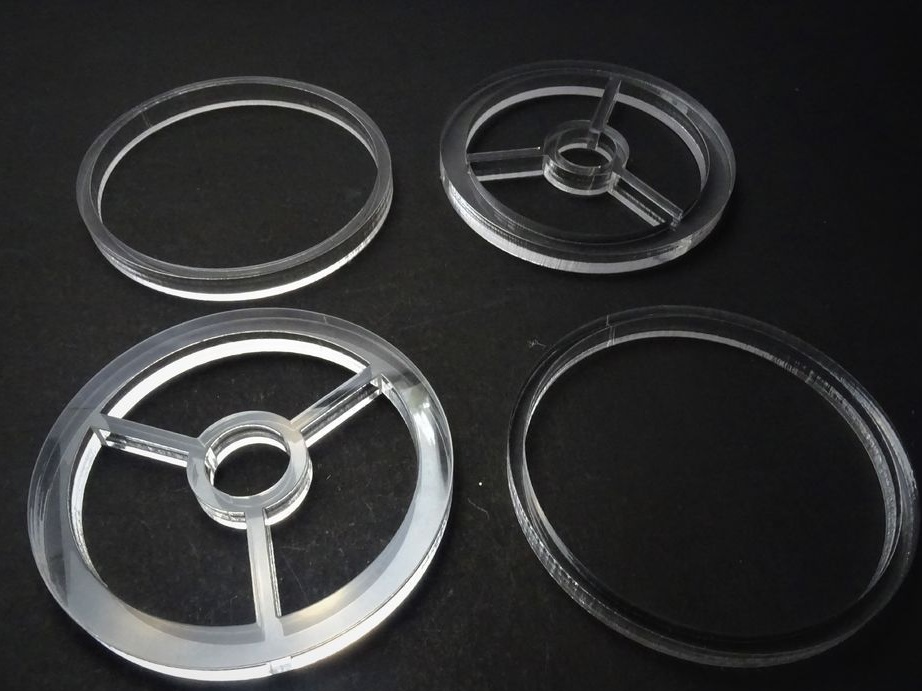
Schritt zwei: Laserschneiden
Für das Geländewagen verwendete der Kapitän Acryl in verschiedenen Stärken und Farben.
Schwarzer Decklack 3 mm x 1
Untere Schicht Schwarz 3 mm x 1
Schwarzer Seitenrahmen 5 mm x 2
Seitenwand transparent 2 mm x 1
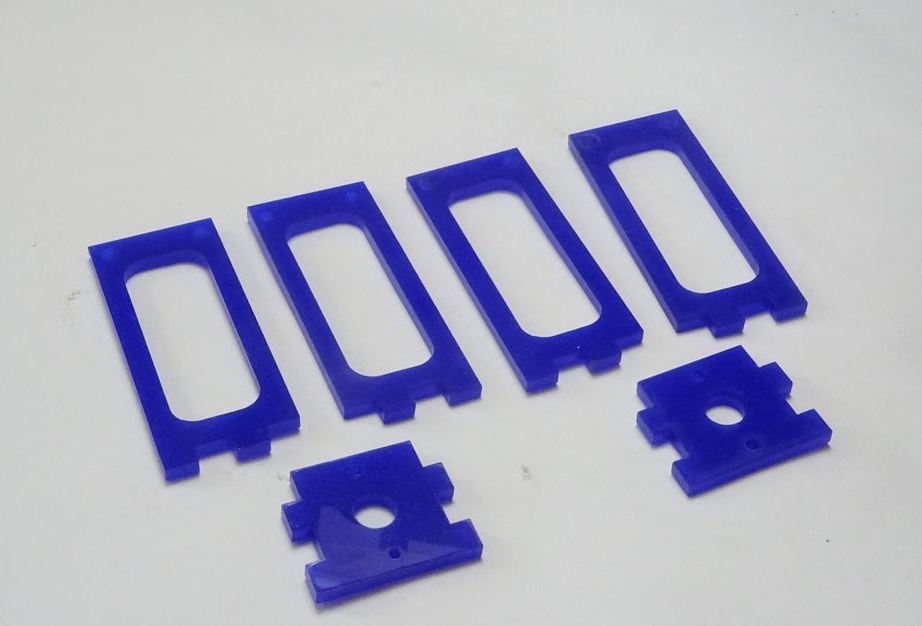
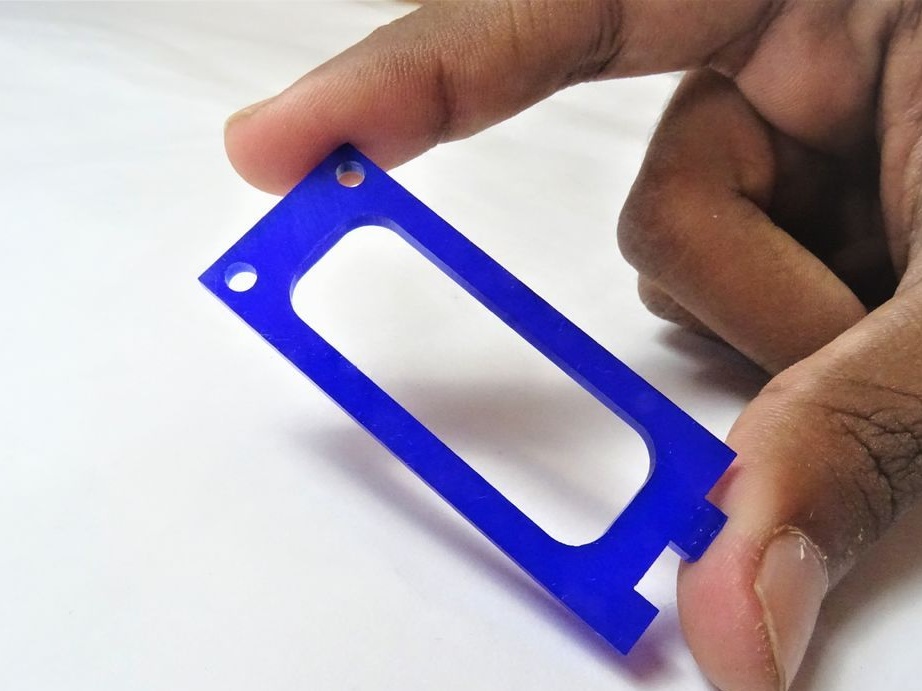
Leistungsseite blau 3 mm x 4
Brückenoberteil Blau 3 mm x 2
Motorscheibe Weiß 3 mm x 2
Vorderrad weiß 10 mm x 2
Innenfelge (Hinterrad) Weiß 3 mm x 4
Außenfelge (Hinterrad) Weiß 10 mm x 2
Lenkweiß 3 mm x 1
Schubladenschrank Schwarz 3 mm x 1
Schwarzer Fachdeckel 3 mm x 1
Hintere Motorwelle Weiß 3 mm x 2
Frontplatte weiß 5 mm x 2



Sie können die Datei für die CNC über den Link herunterladen.
Laserschneiden Rover Parts.zip
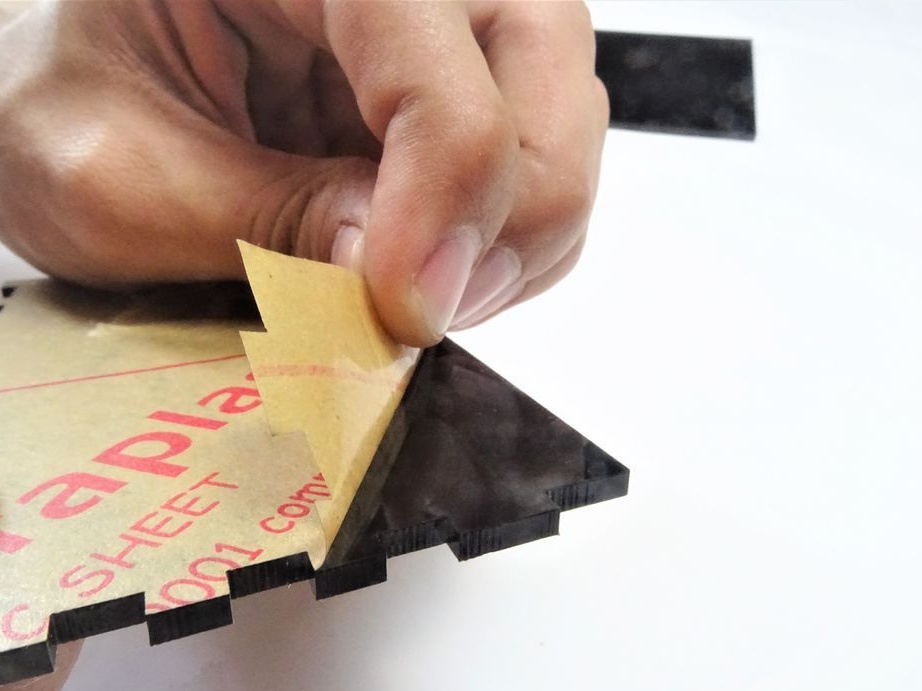
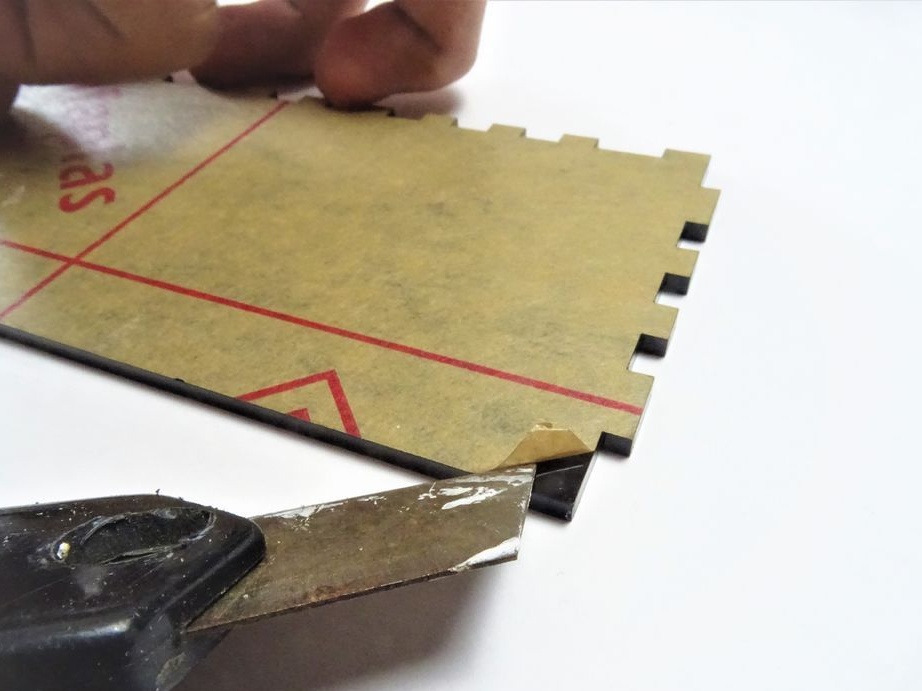
Entfernen Sie nach der Herstellung der Teile die Schutzschicht von diesen.
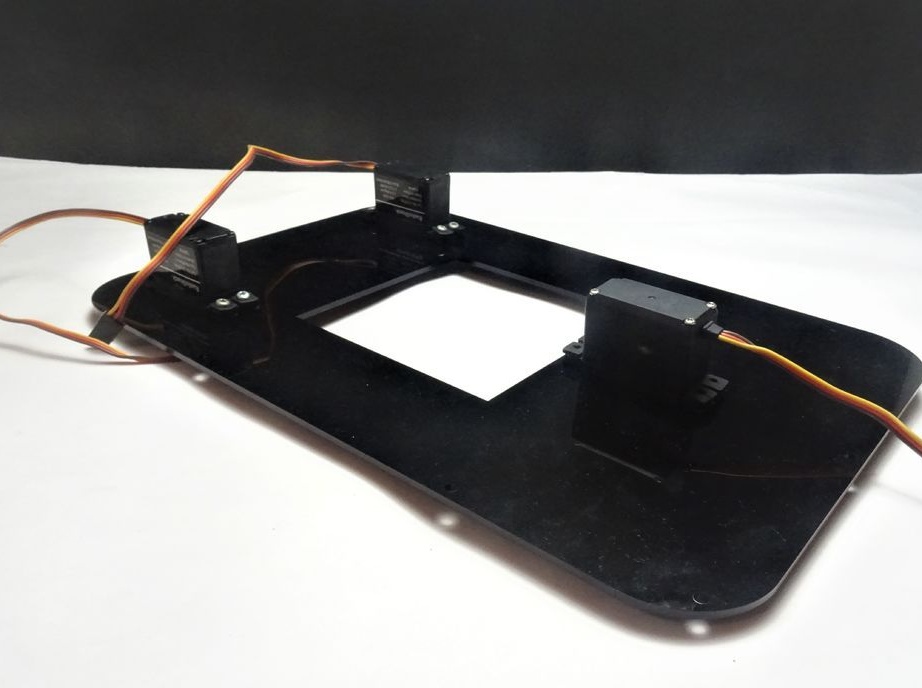
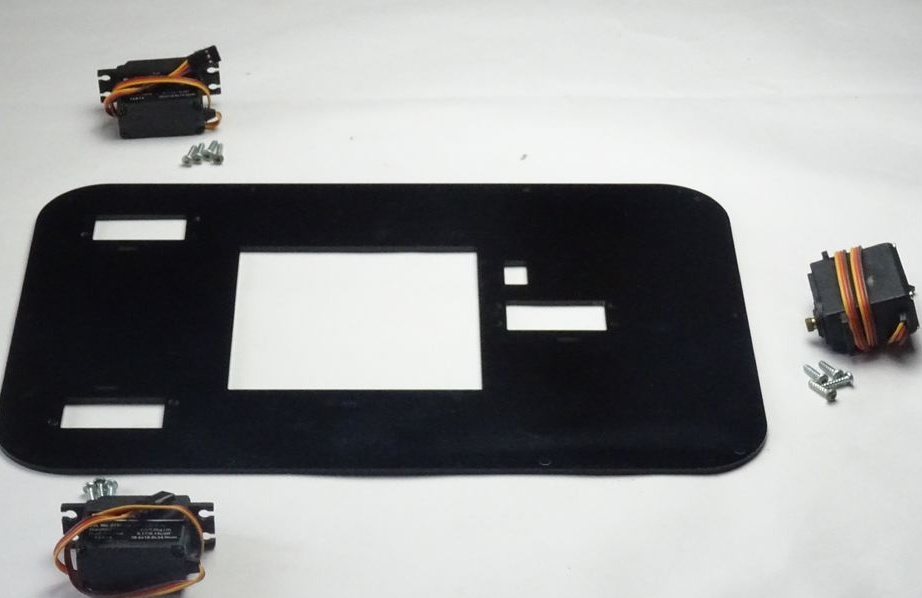
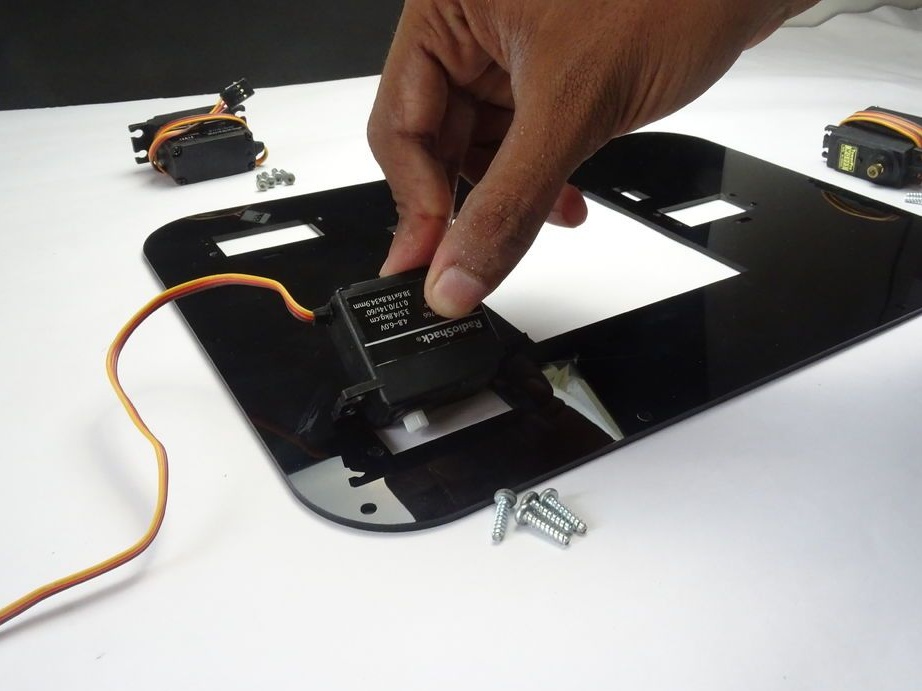
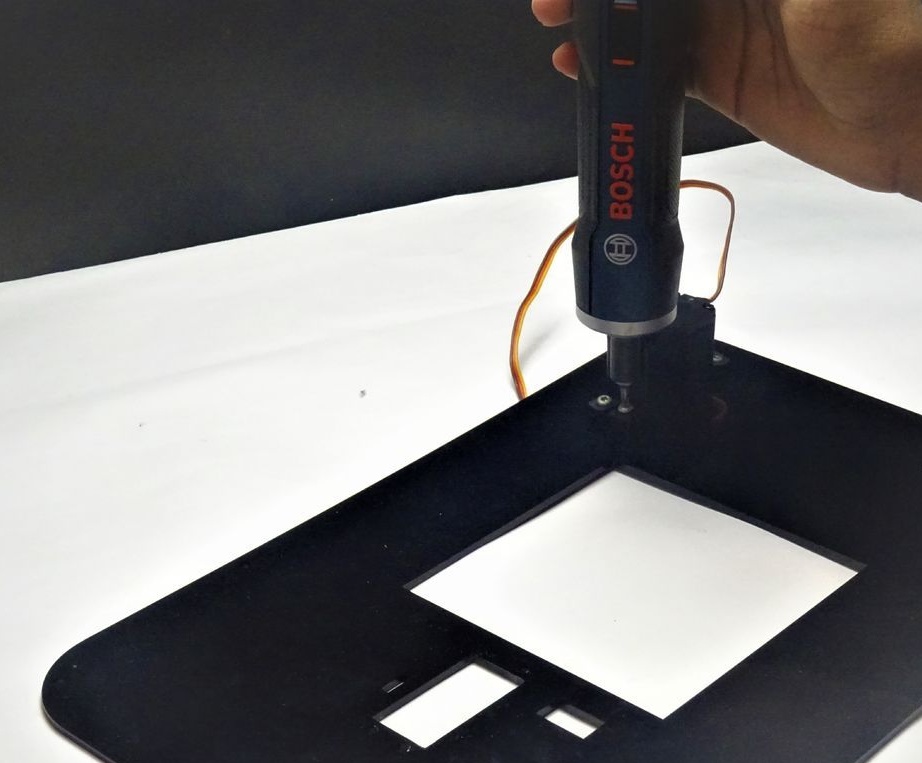
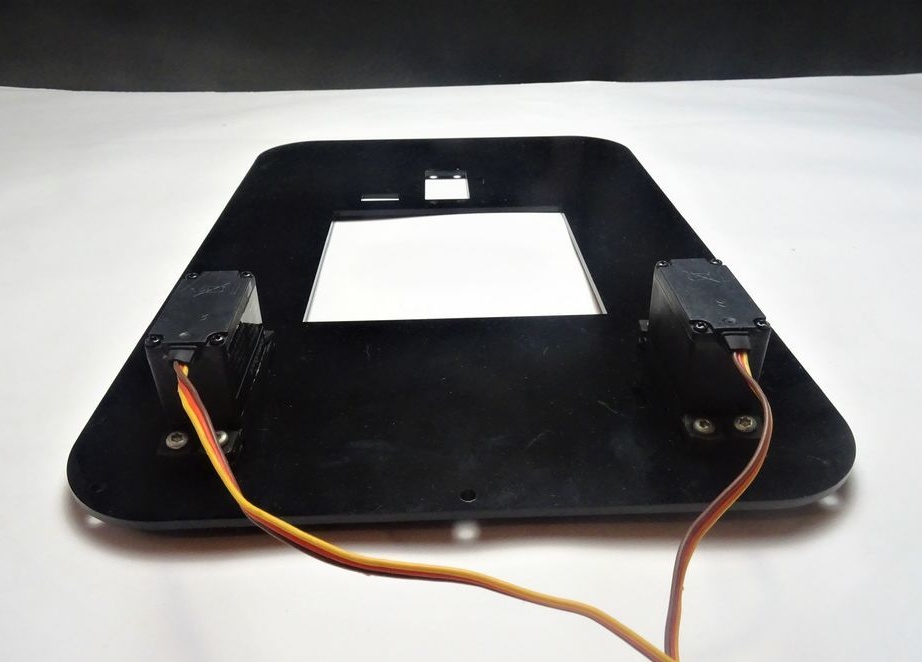
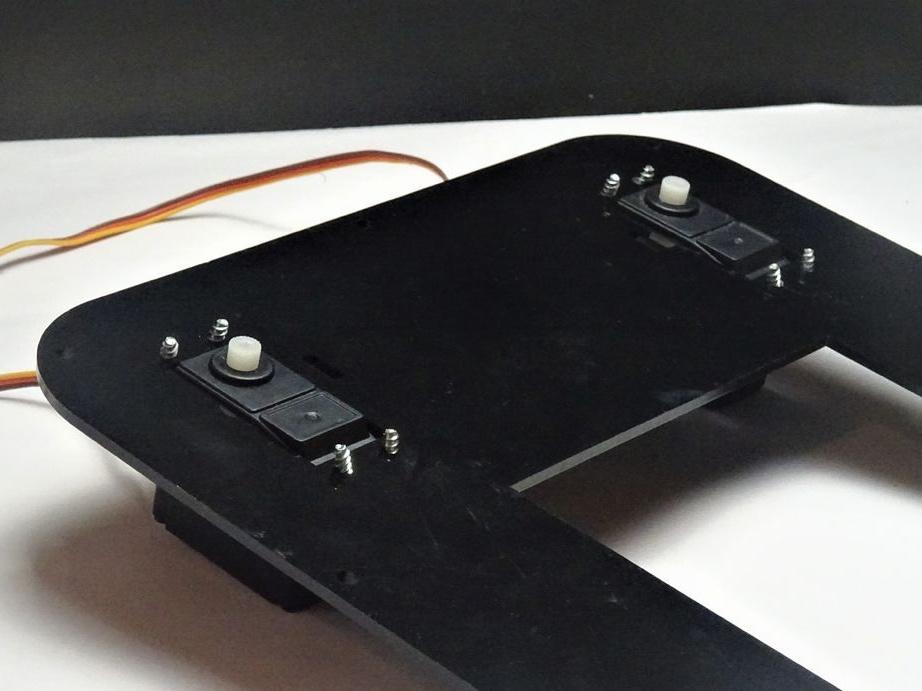
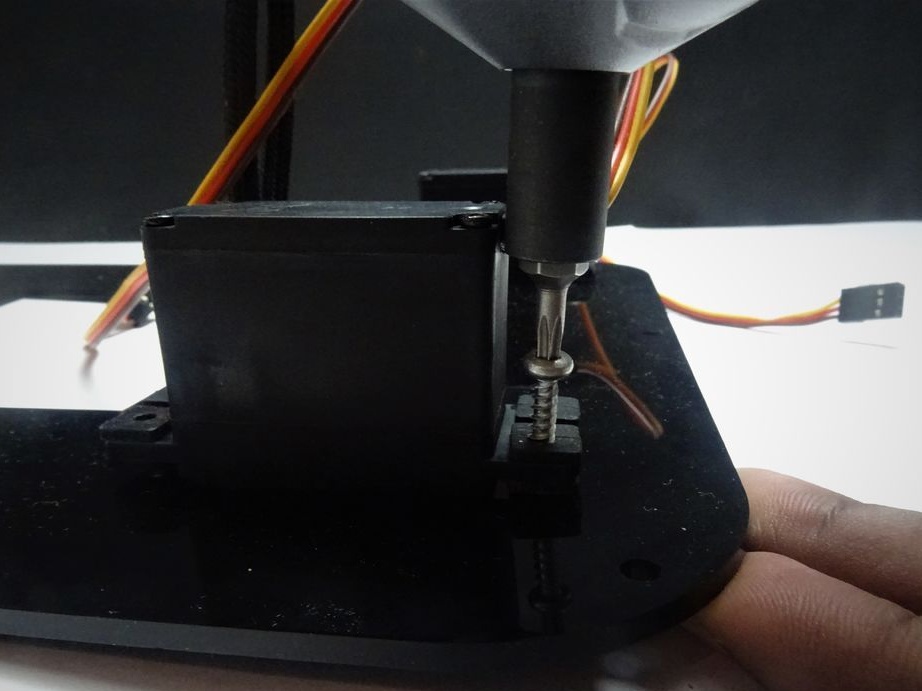
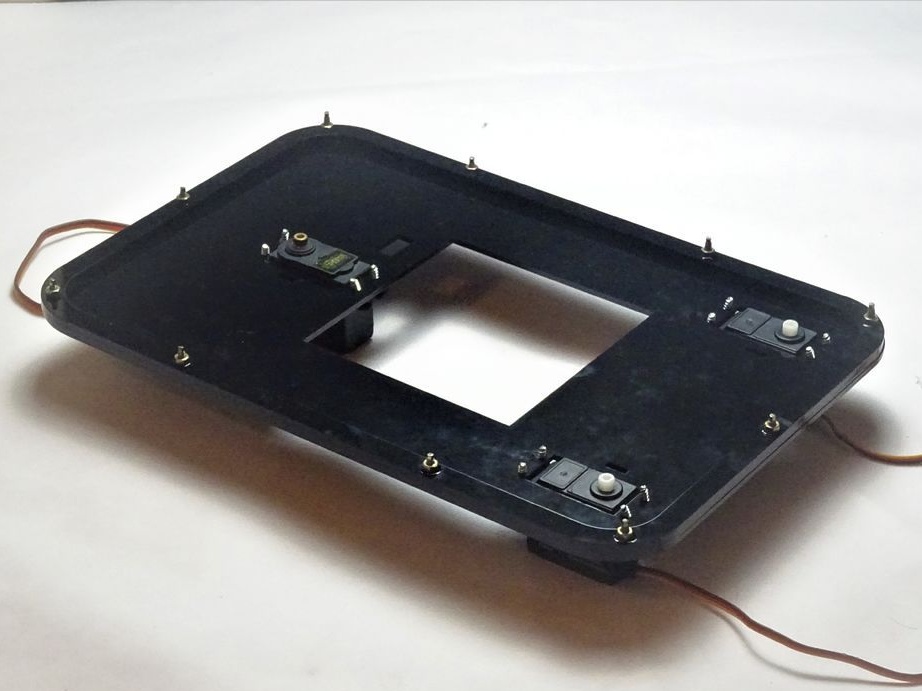
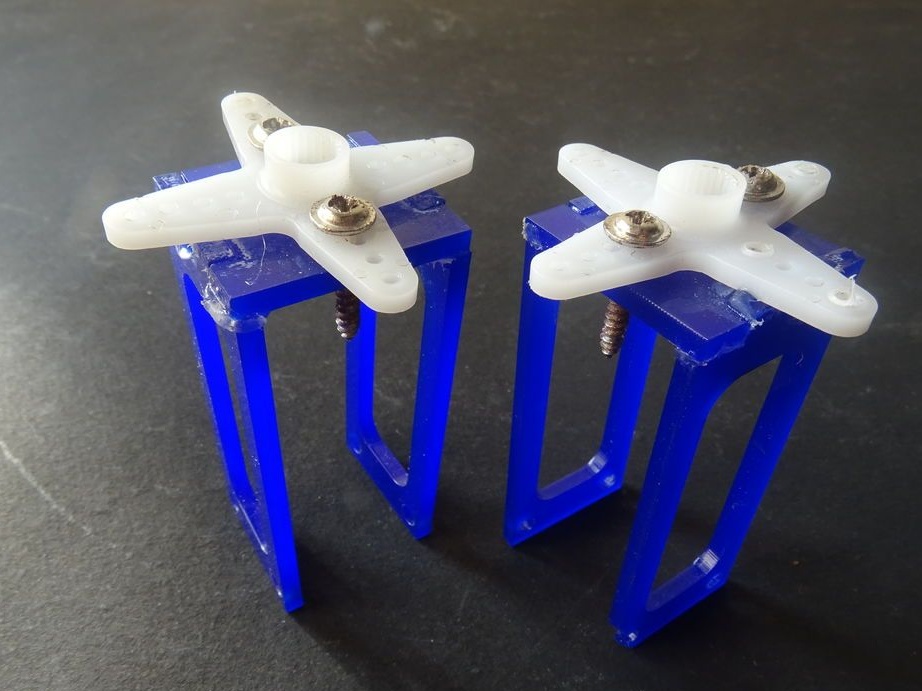
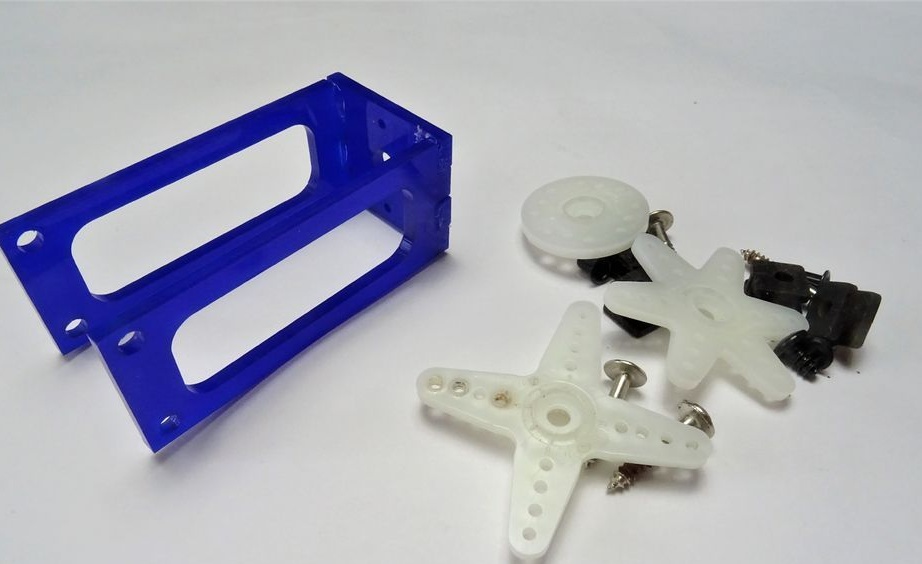
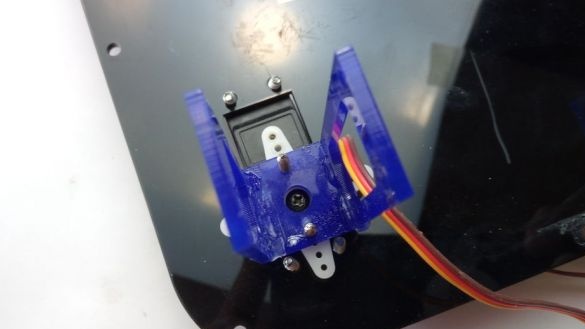
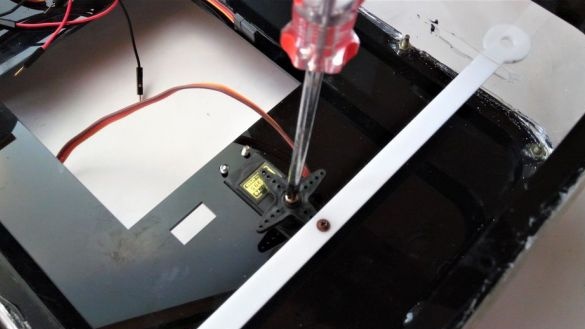
Schritt drei: Servomotoren einbauen
Alle drei Servomotoren sind mit der Plattform verschraubt. Zwei nach hinten und einer nach vorne.

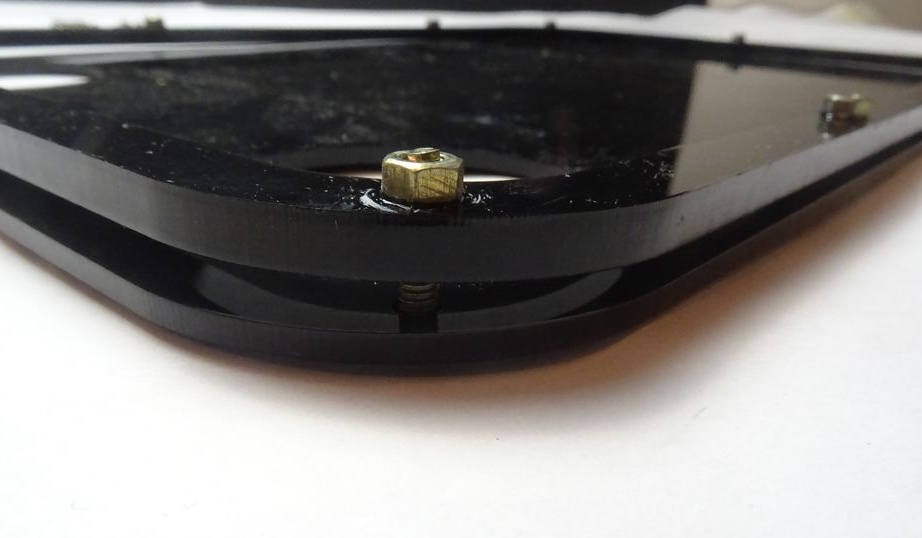
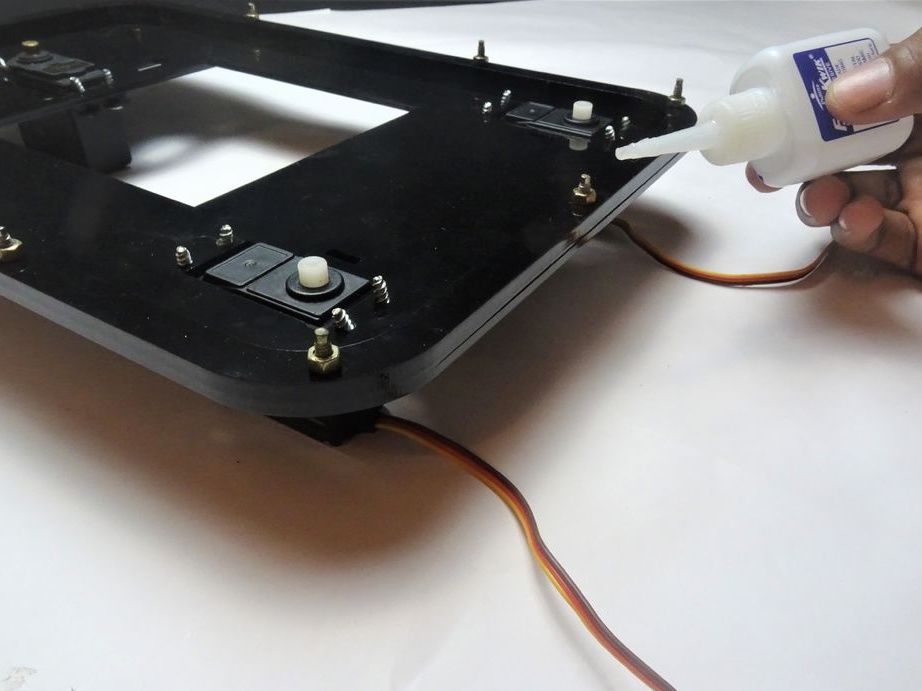
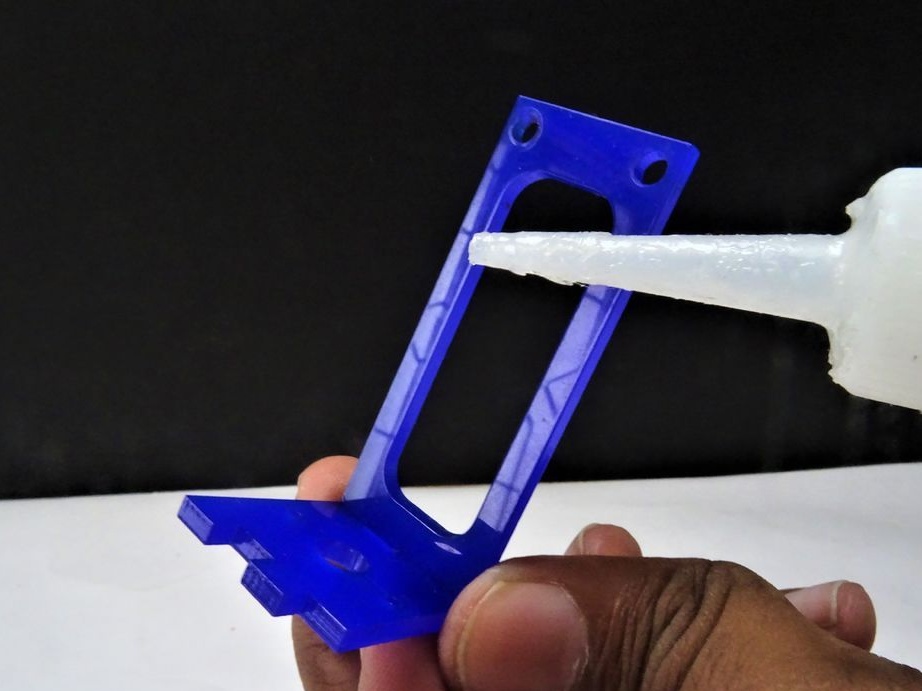
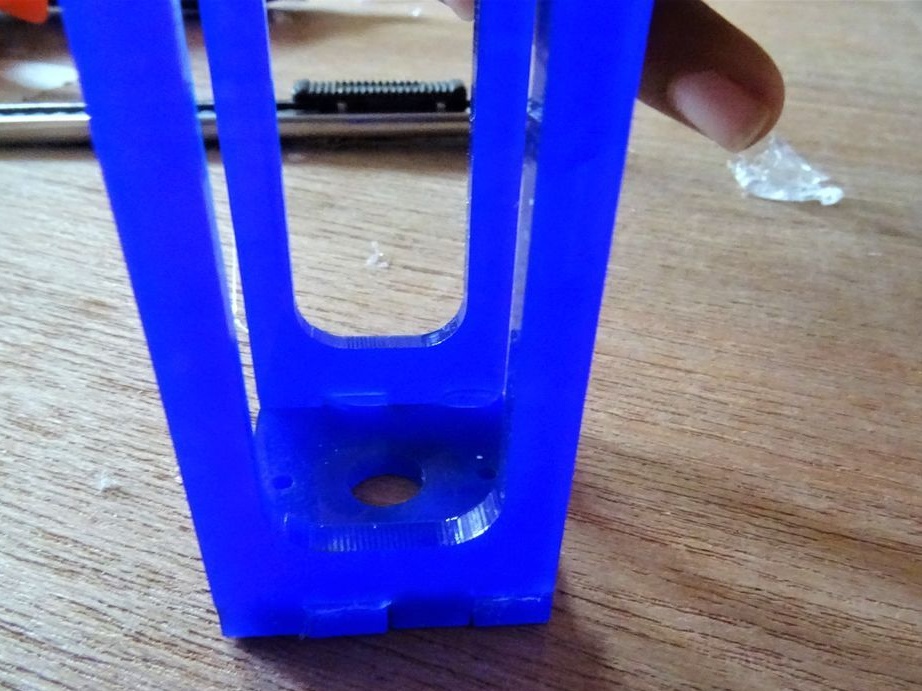
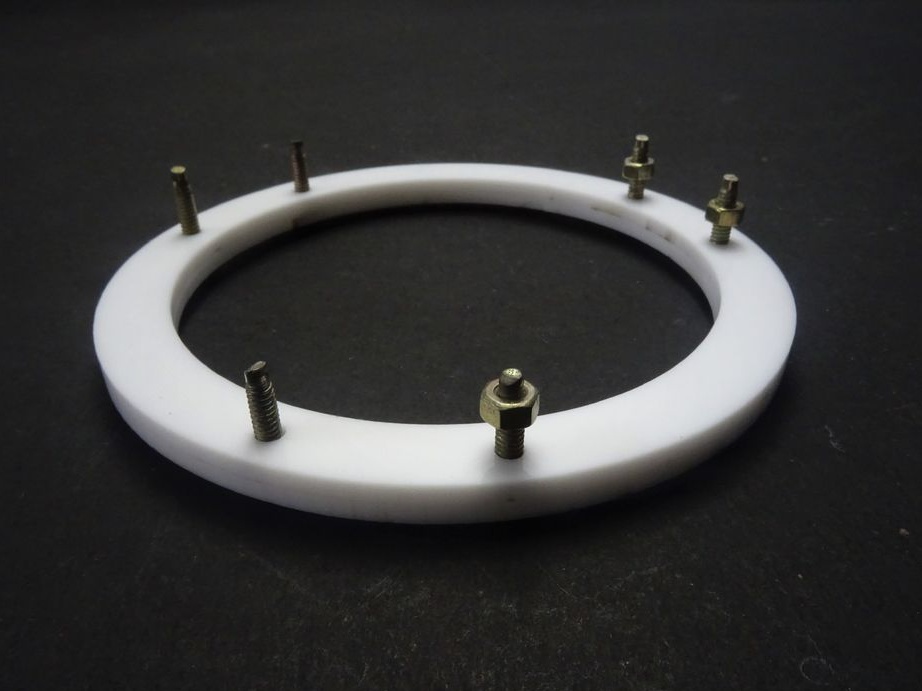
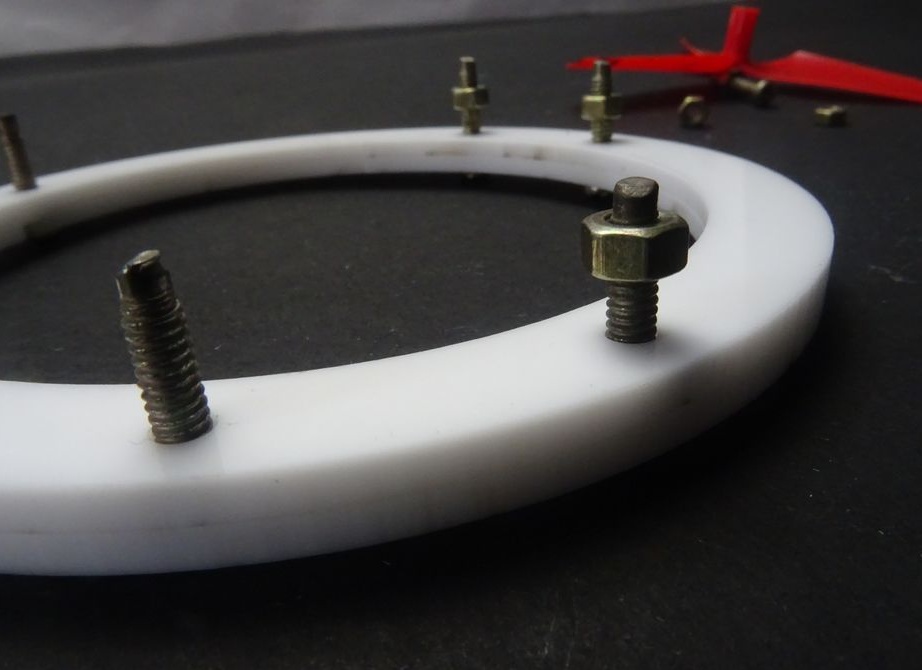
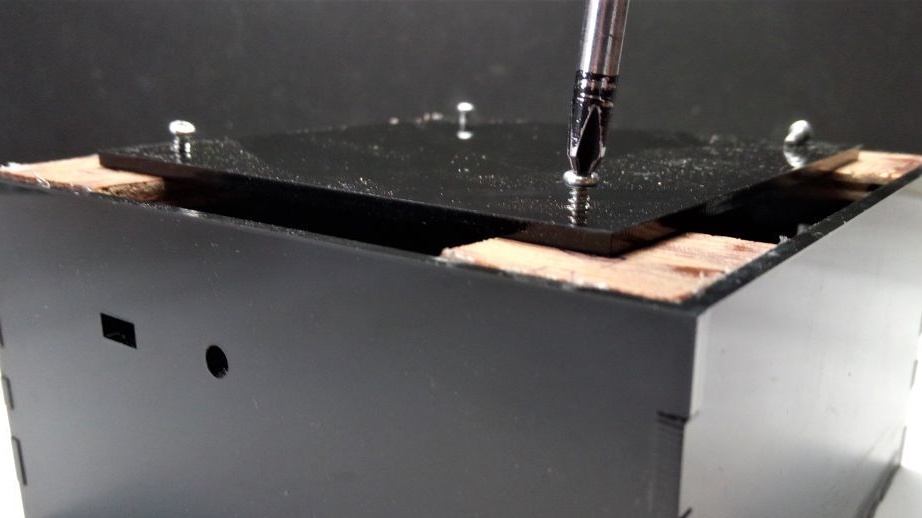
Schritt vier: Muttern
Für den Zugang zu den Mechanismen sind der obere und der untere Teil miteinander verschraubt. Klebt die Muttern auf den Sekundenkleber auf den Rahmen und verstärkt ihn dann mit Epoxid.


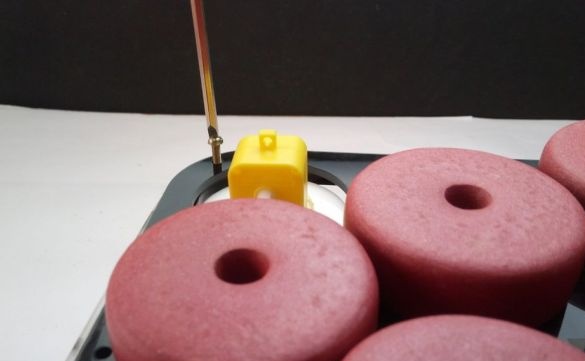
Fünfter Schritt: Schwimmt
Kleber schwimmt.



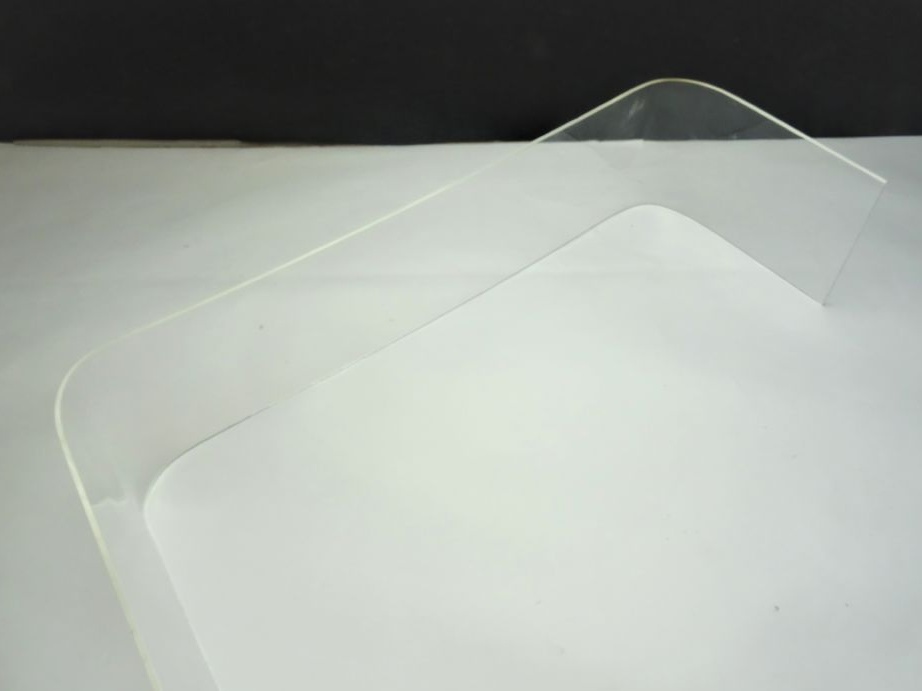
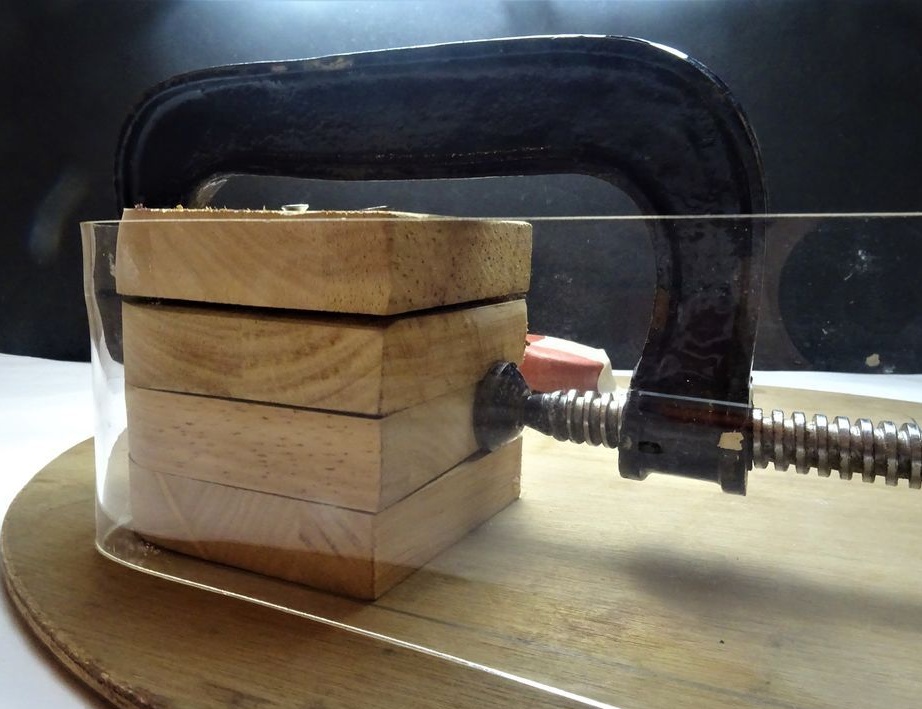
Schritt Sechs: Formen von Acryl
Um Acryl zu biegen, macht ein Handwerker eine Schablone aus Holz.



Er klemmt das Teil mit einer Klammer fest und gibt dem Teil durch Erhitzen mit einem Haartrockner die gewünschte Form.





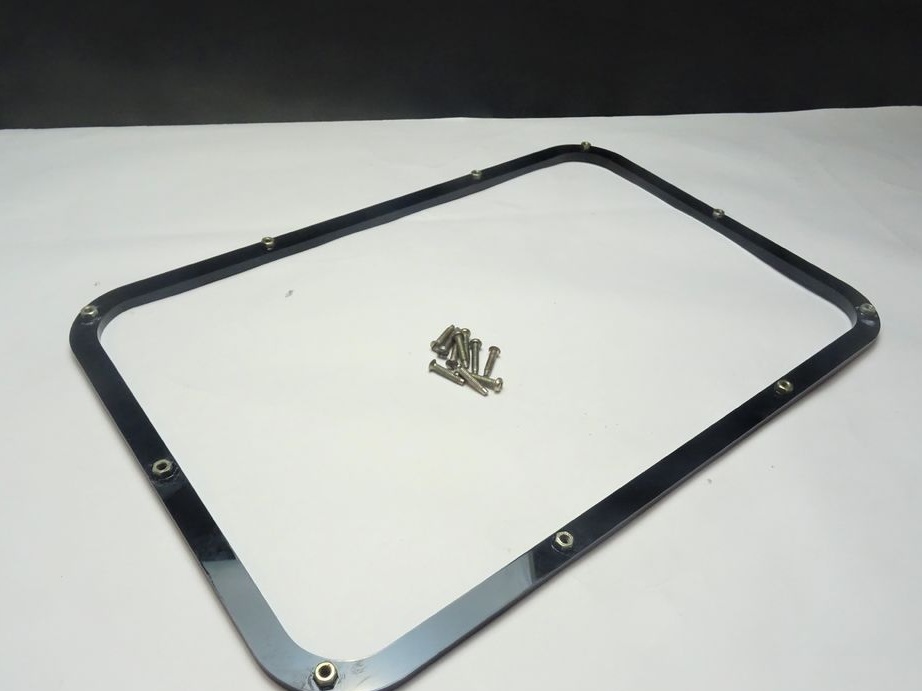
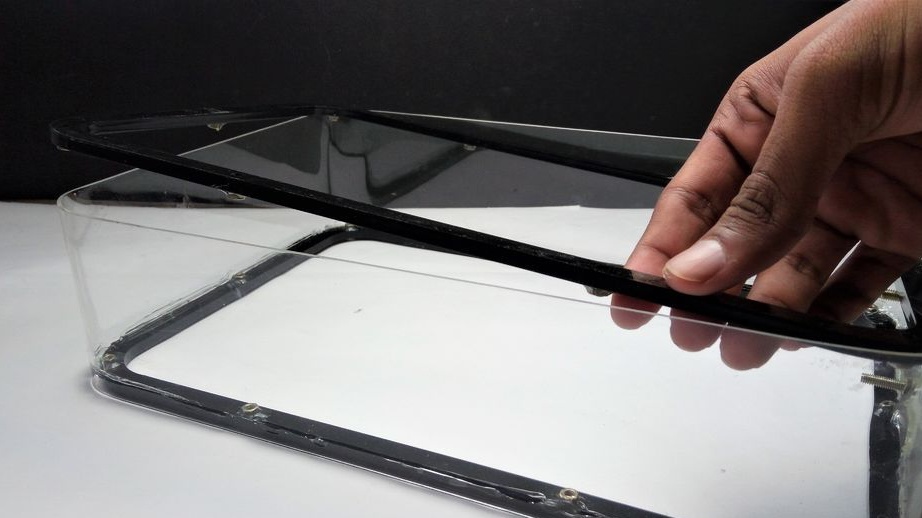
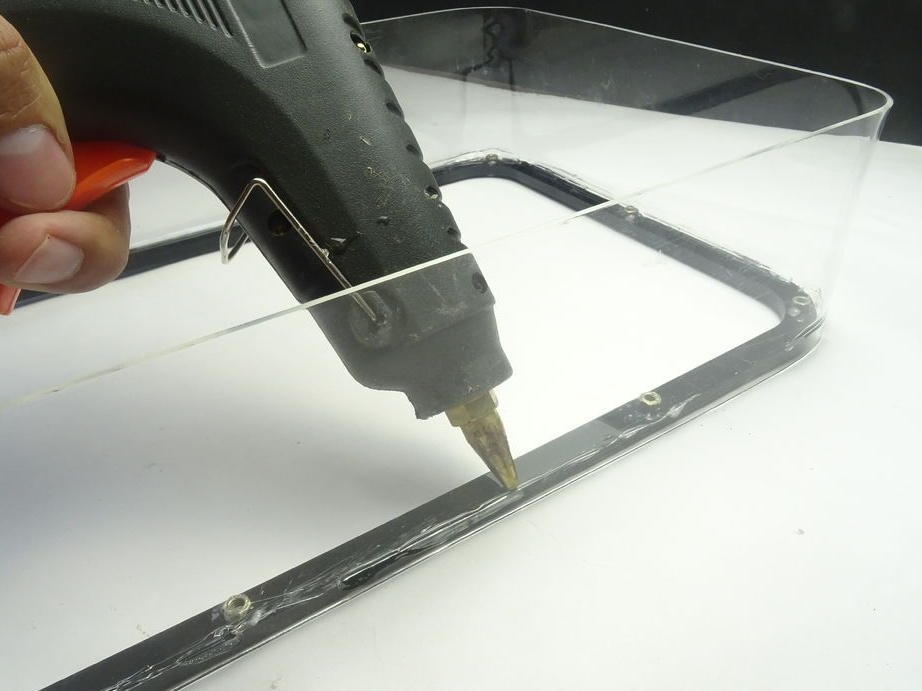
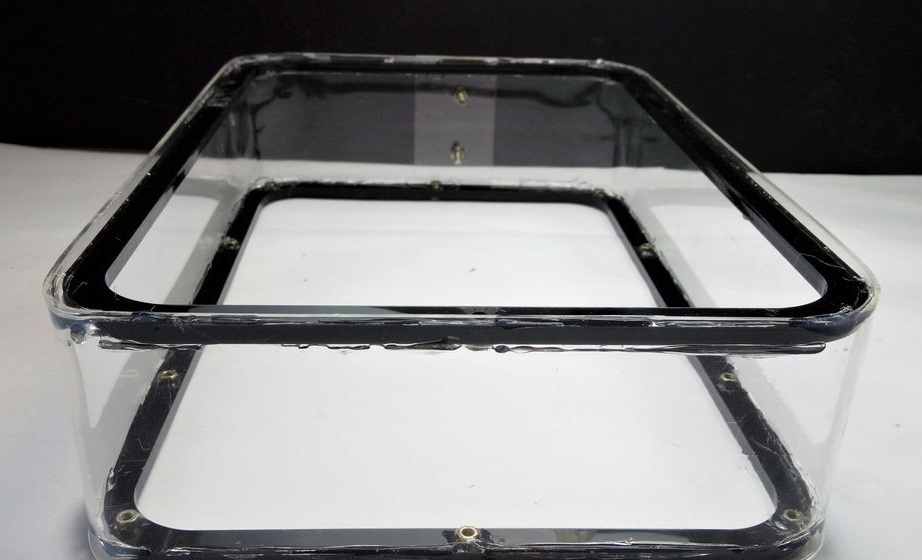
Siebter Schritt: Rahmen
Klebt den oberen und unteren Rahmen auf den transparenten Körper. Die Nähte werden sorgfältig mit Heißkleber versiegelt.







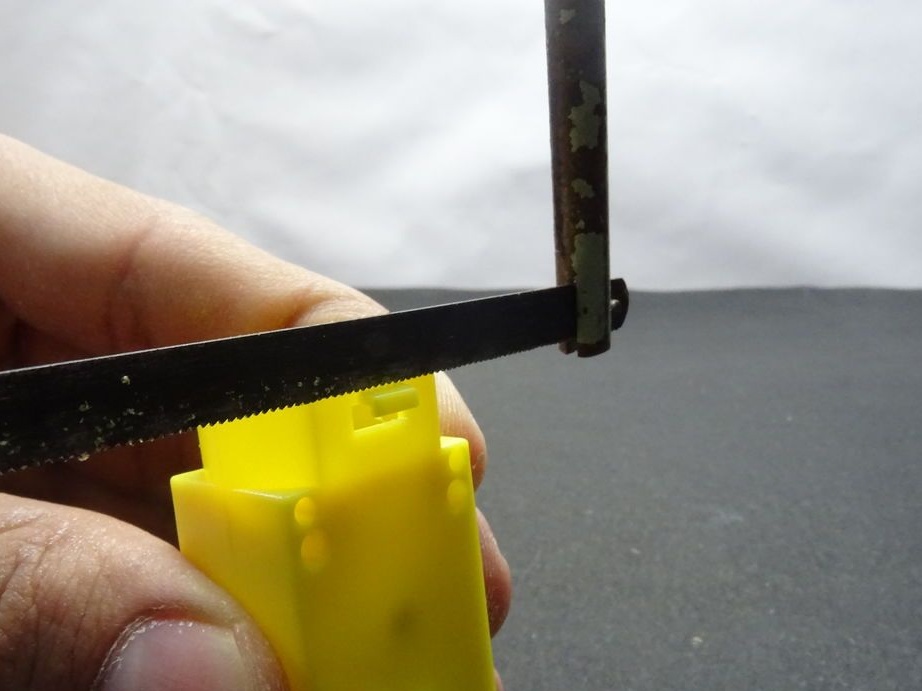
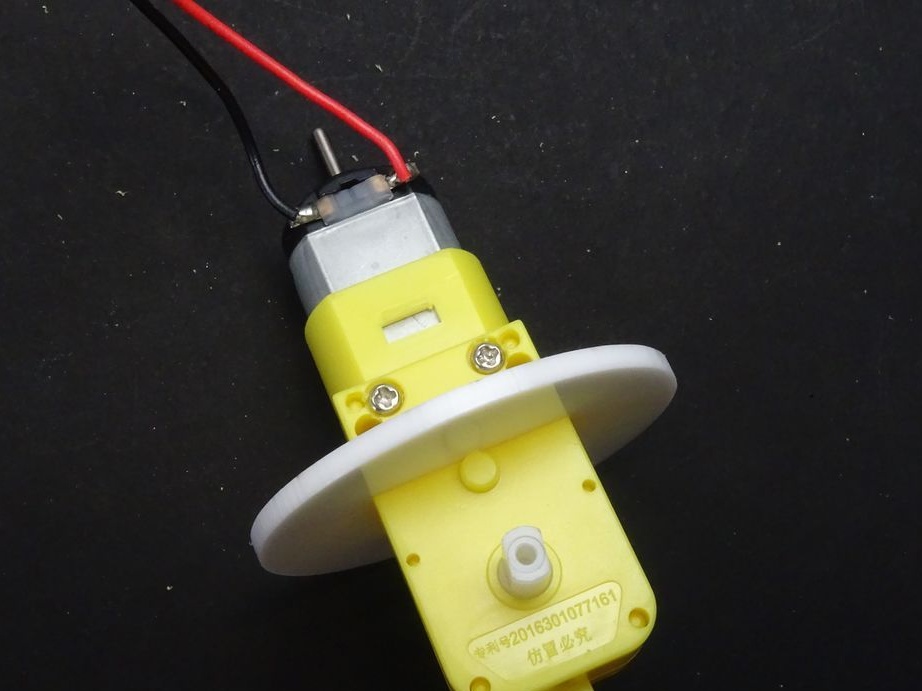
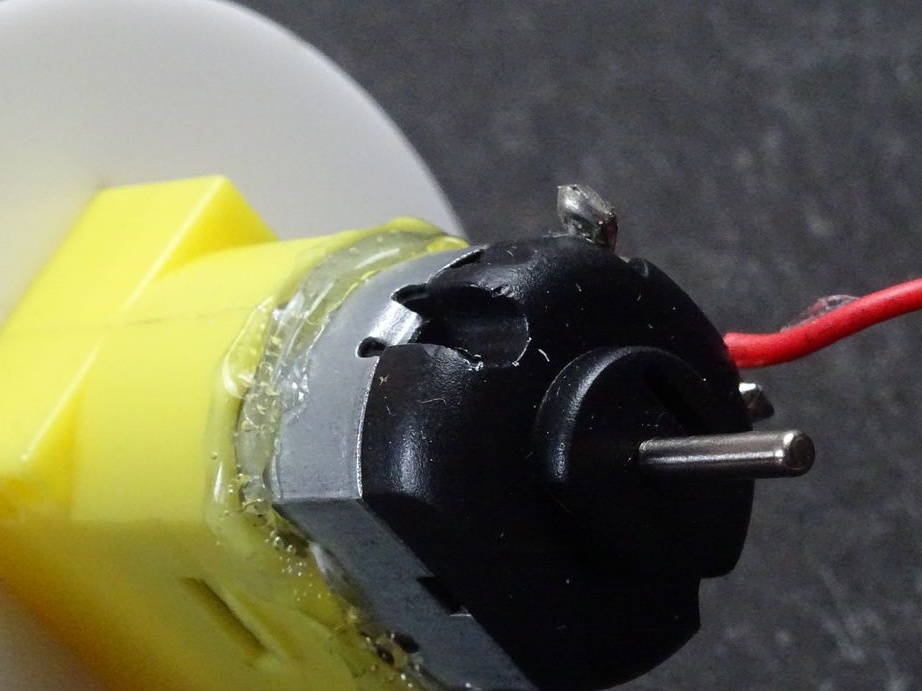
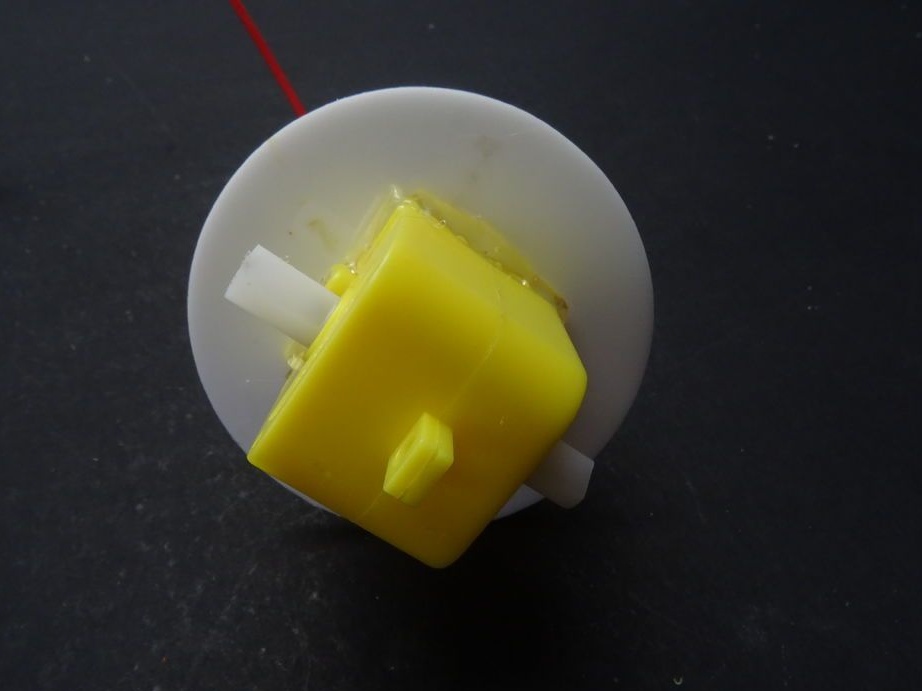
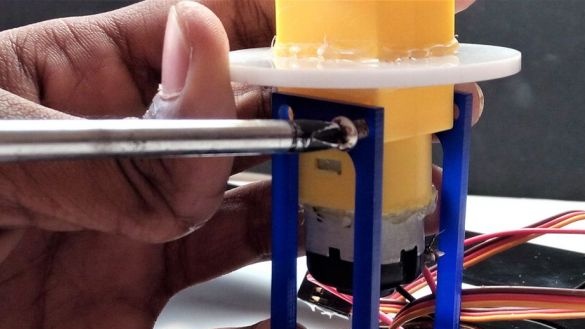
Schritt acht: Motortuning
Jetzt müssen Sie das Motorgehäuse bearbeiten, um Teile darauf zu installieren.
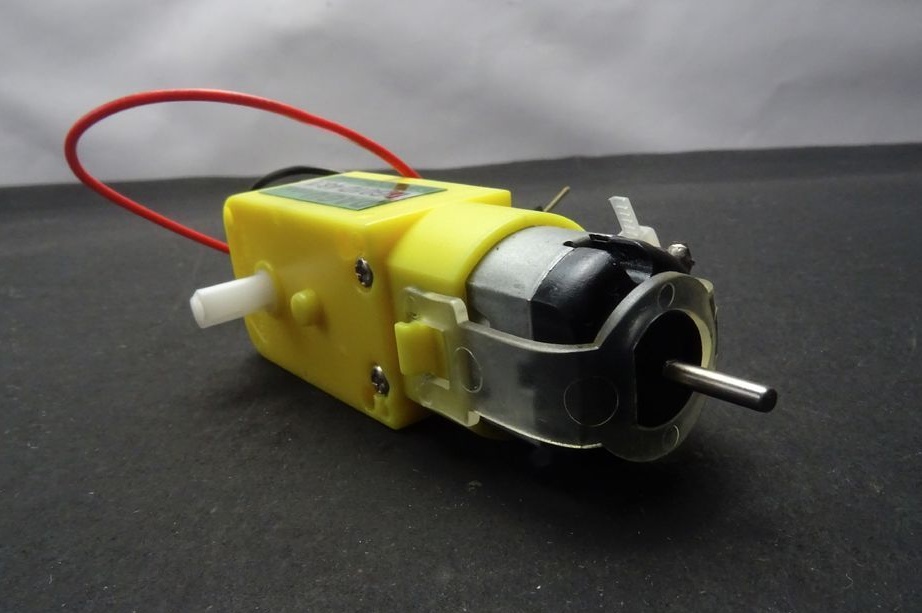
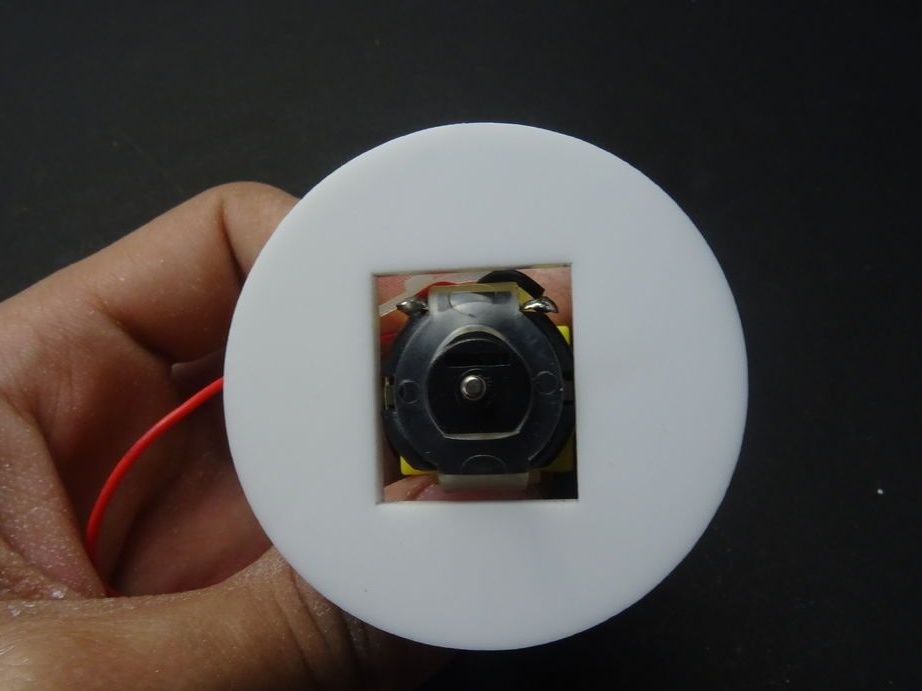
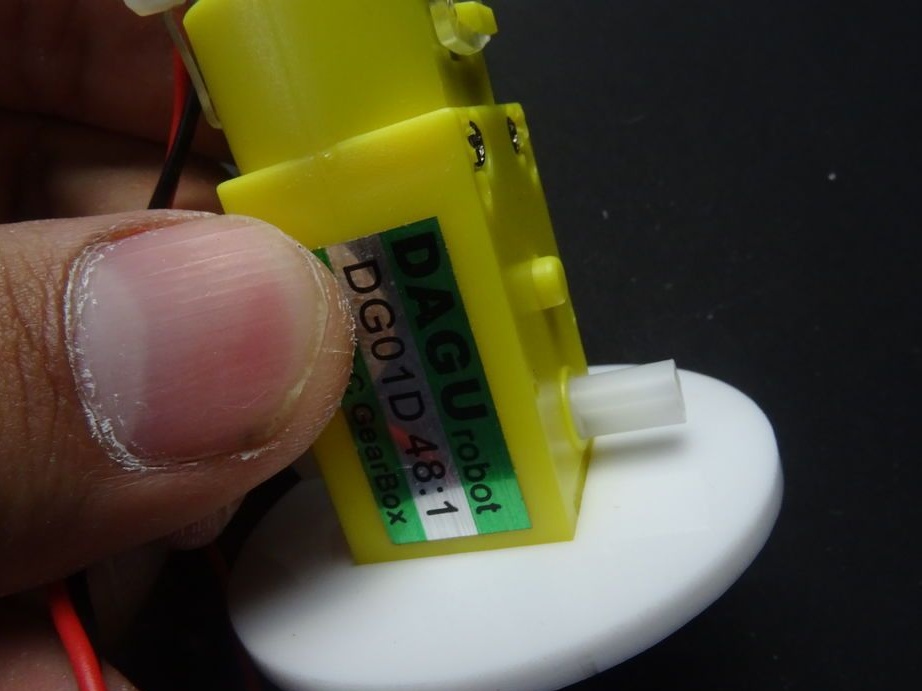

Schneidet alle hervorstehenden Teile vom Körper bis zum Aufkleber ab.
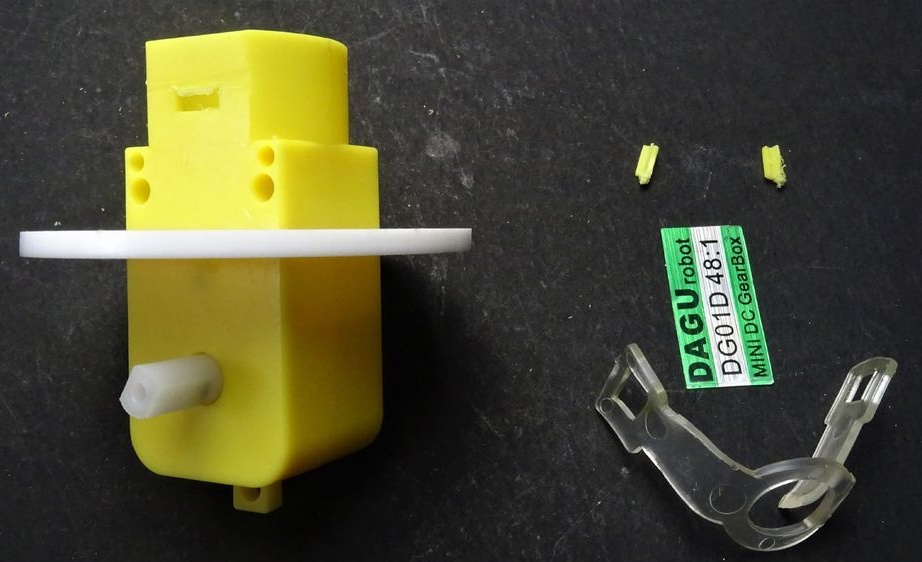

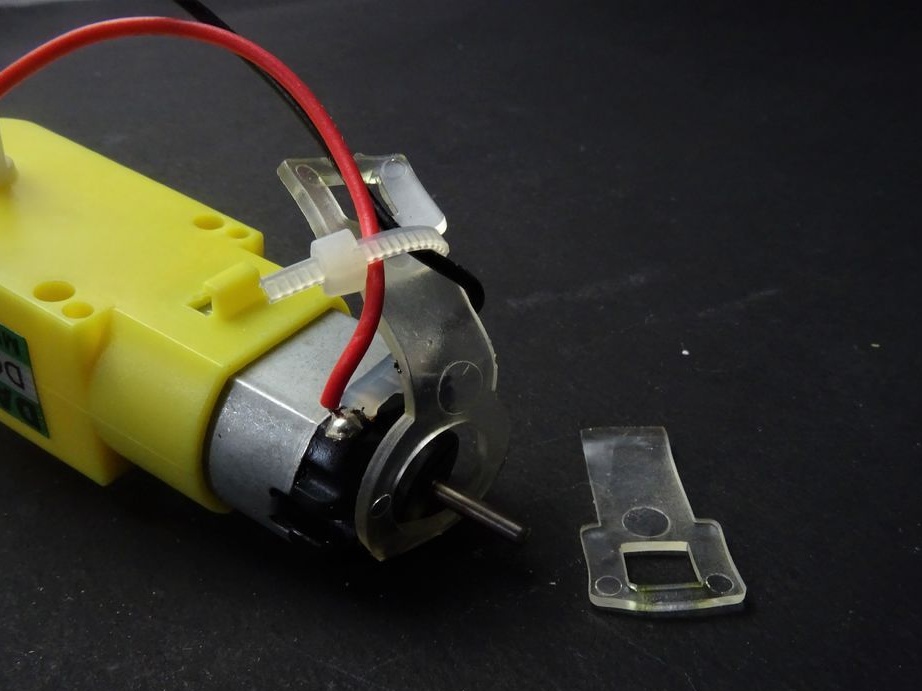


Installiert das Teil auf dem Körper und klebt es. Da die Motorhalterung (Riegel) abgeschnitten werden musste, wird der Motor auch mit Klebstoff fixiert.

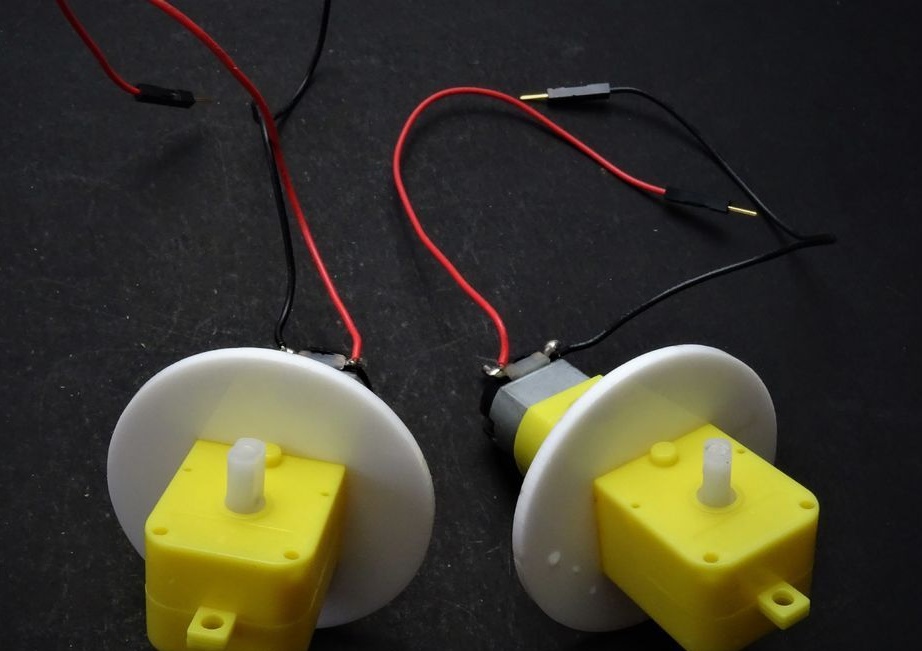

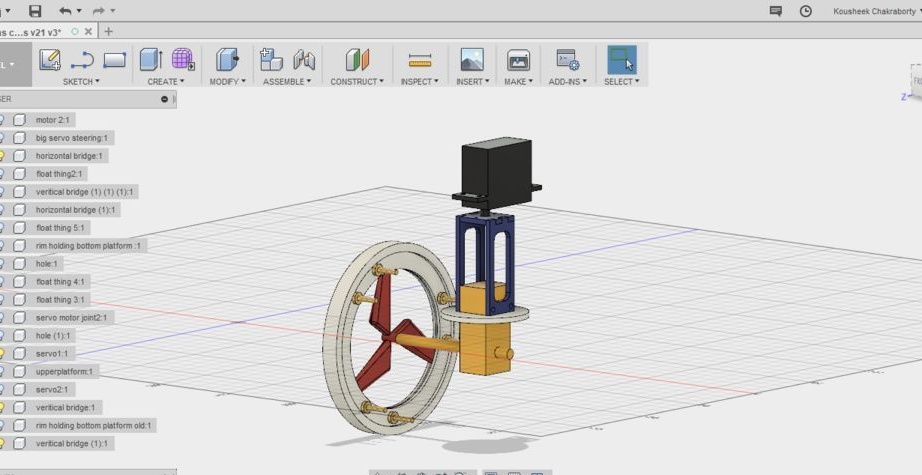
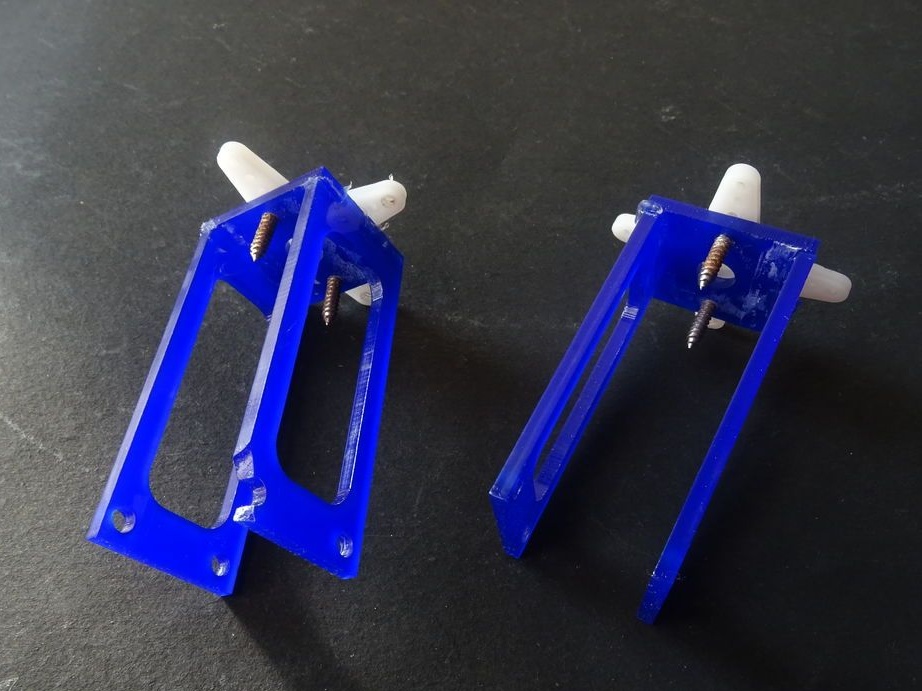
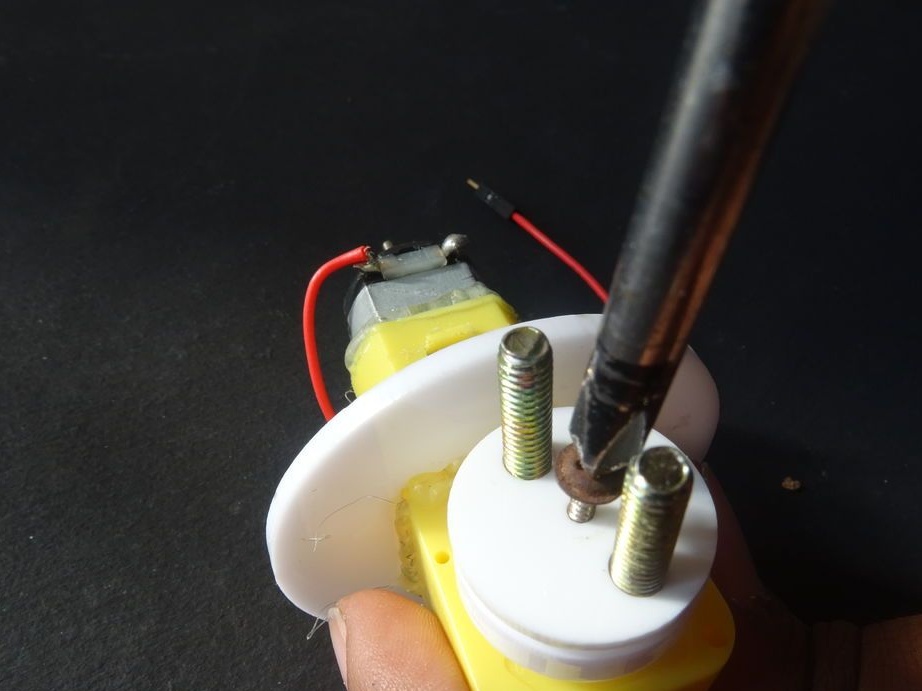
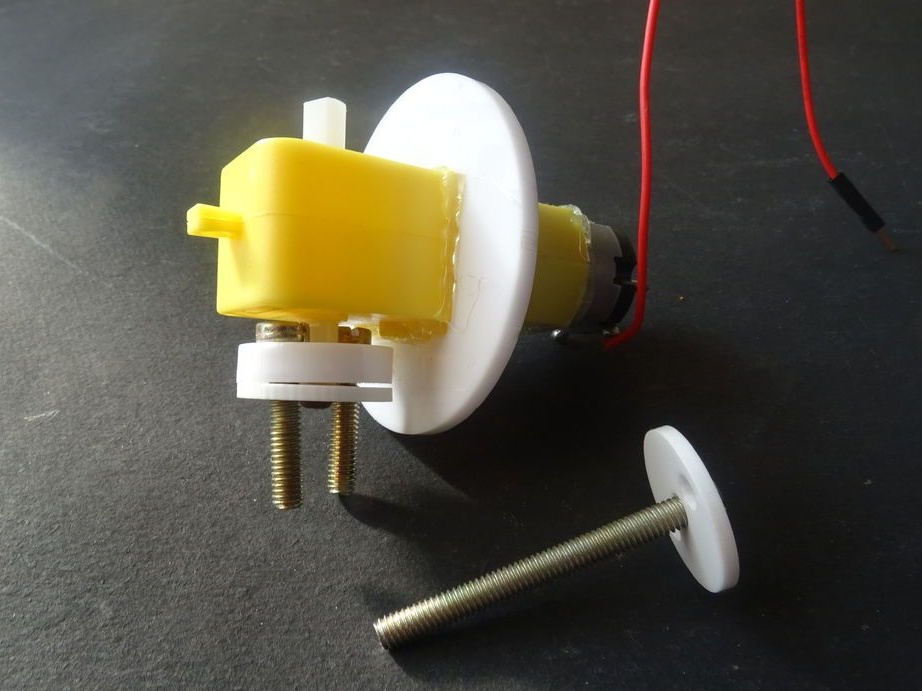
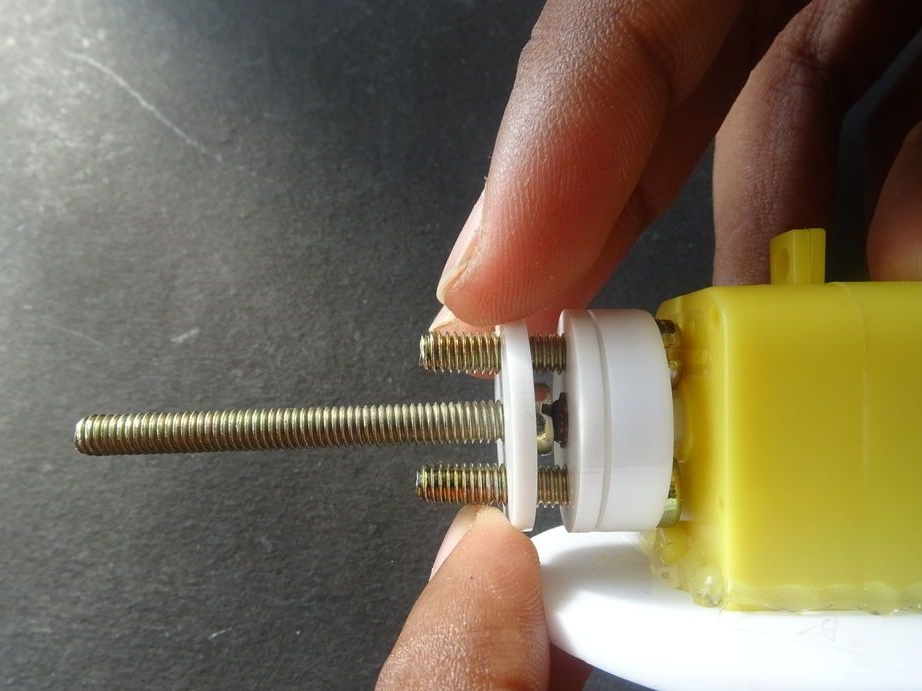
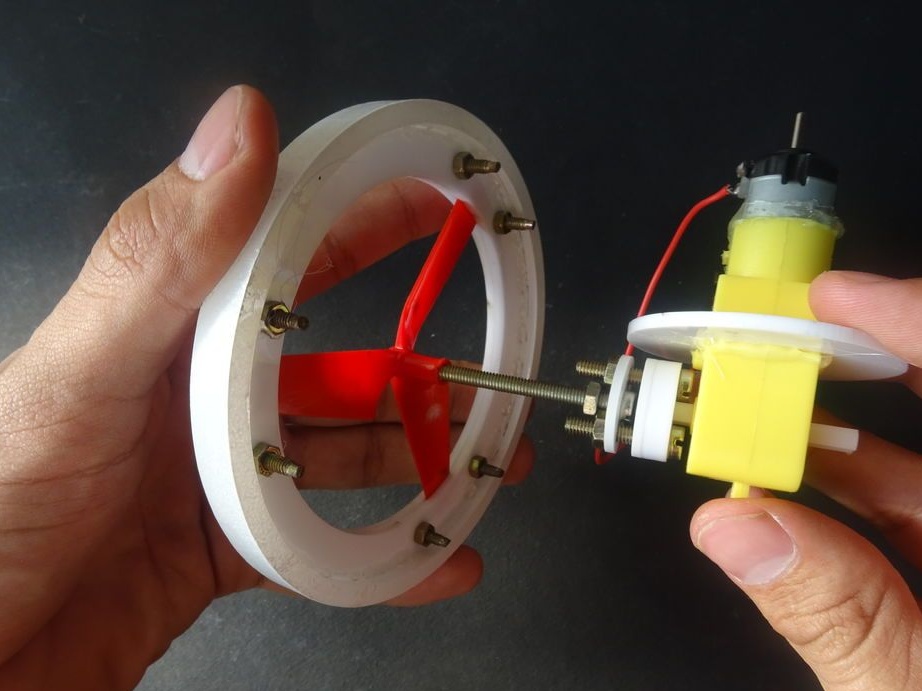
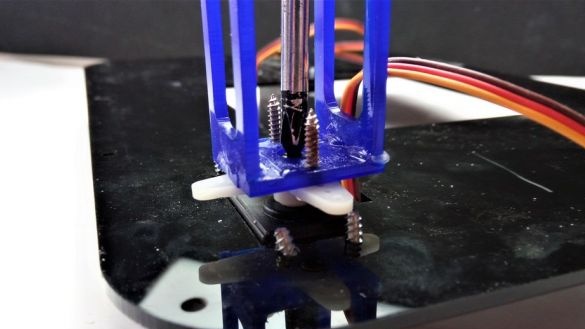
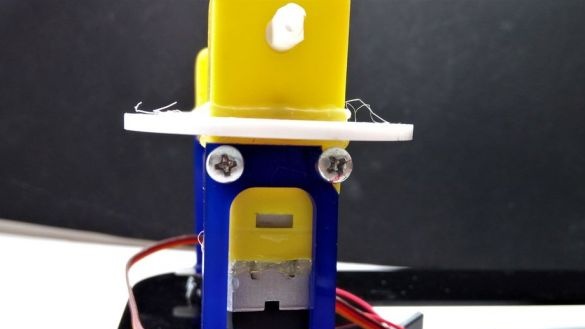
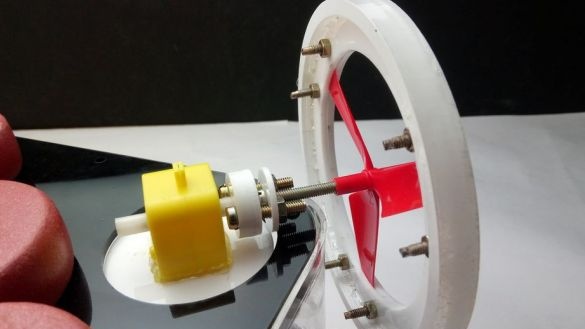
Schritt neun: Schwenkmechanismus
Baut ein Drehgehäuse zusammen. Darin wird ein Motor installiert, der mit dem Servoantrieb verbunden wird.
Klebt den Fall.

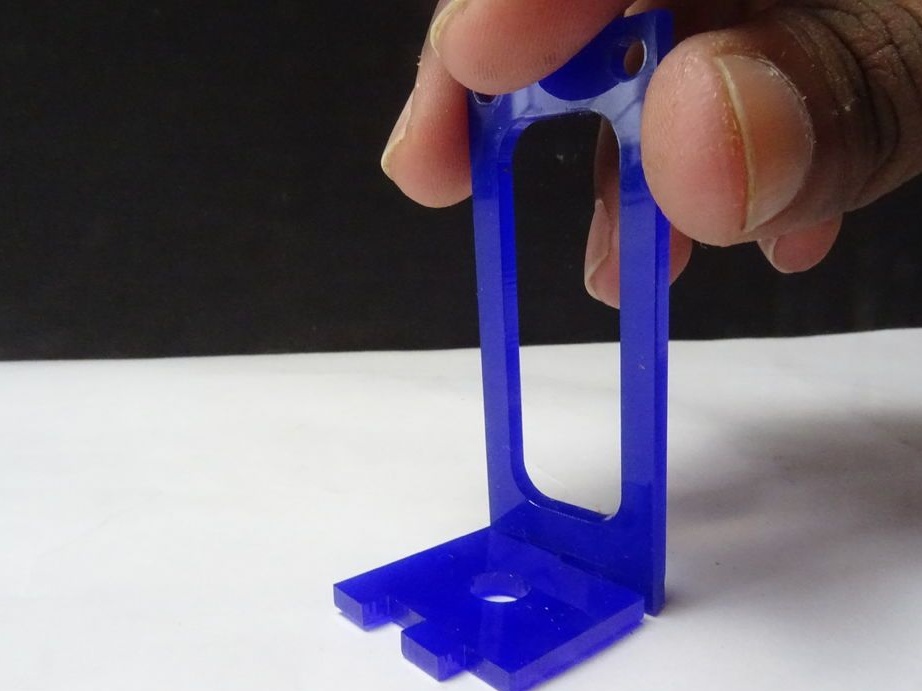

Schrauben am Koppler.


Schritt zehn: Malen
Da der Meister kein weißes Acryl der erforderlichen Dicke hatte, wurden die Räder und die Felge aus transparentem Acryl ausgeschnitten und dann weiß lackiert.




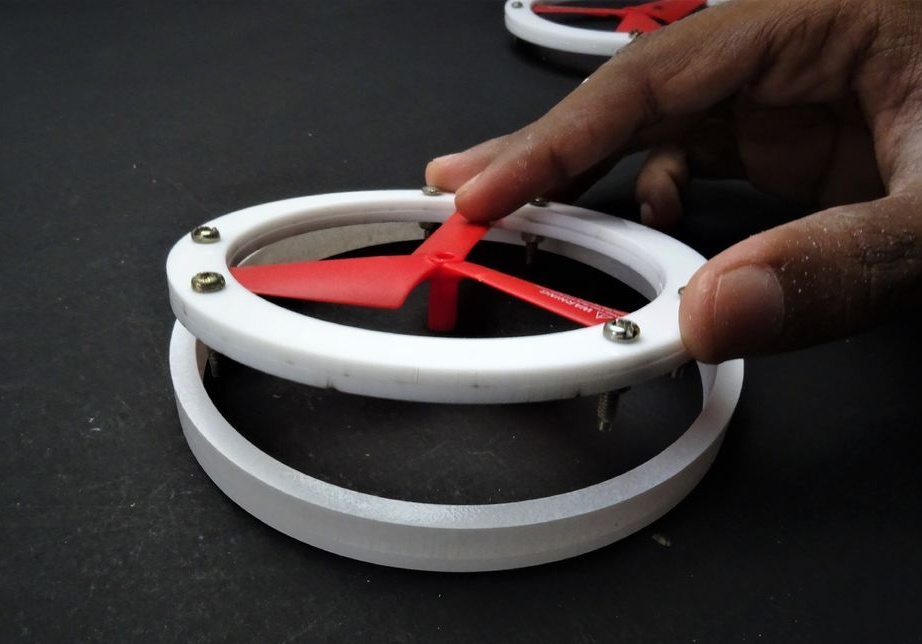
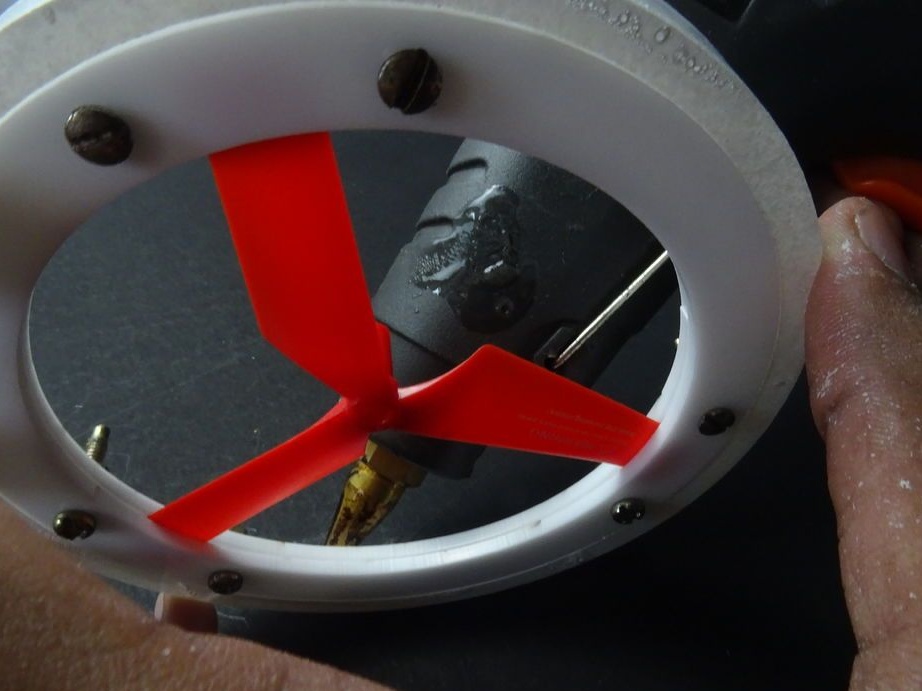
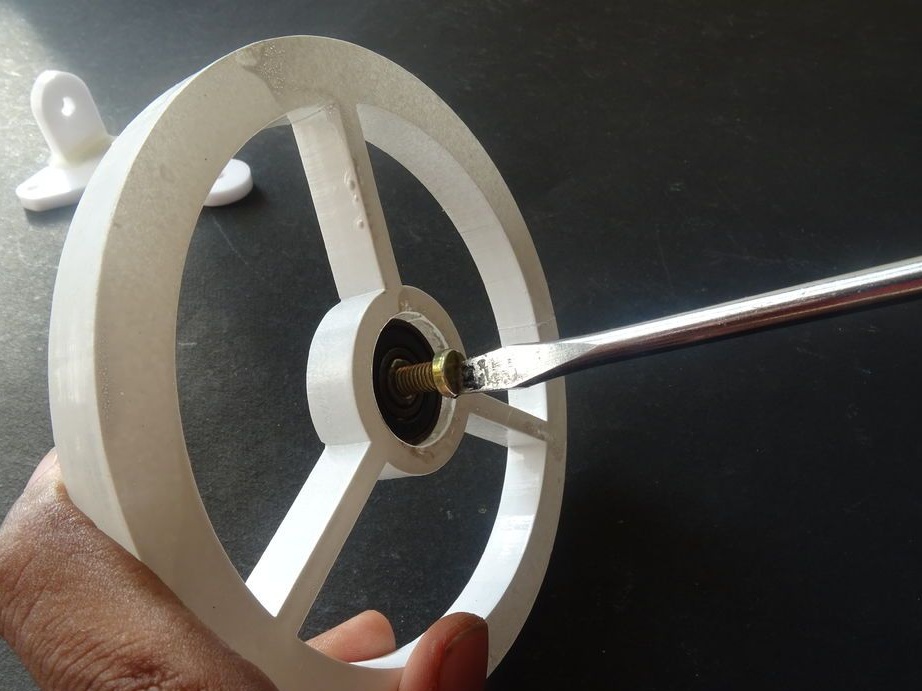
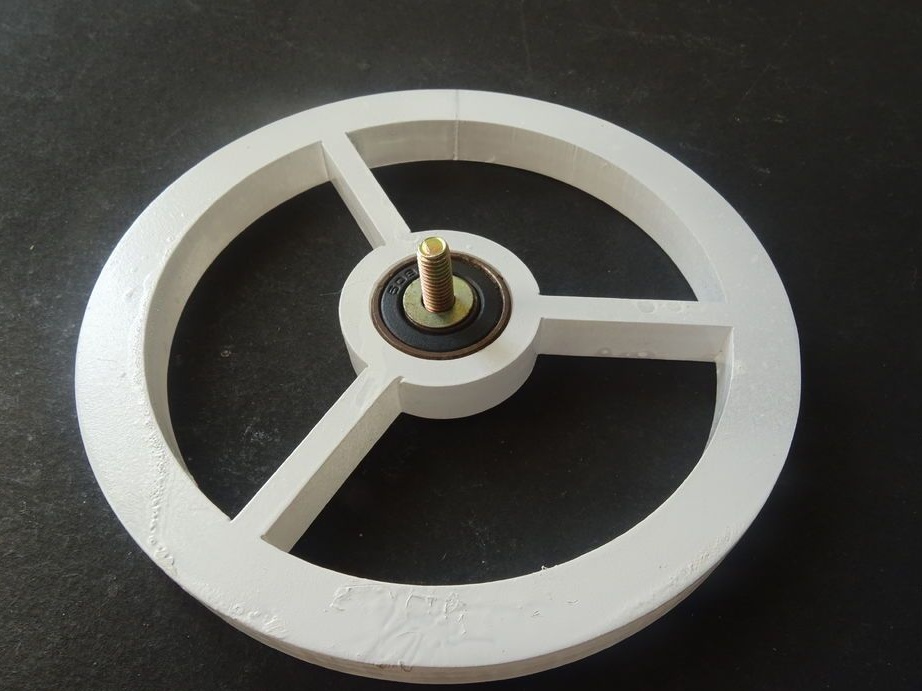
Schritt elf: Radmontage
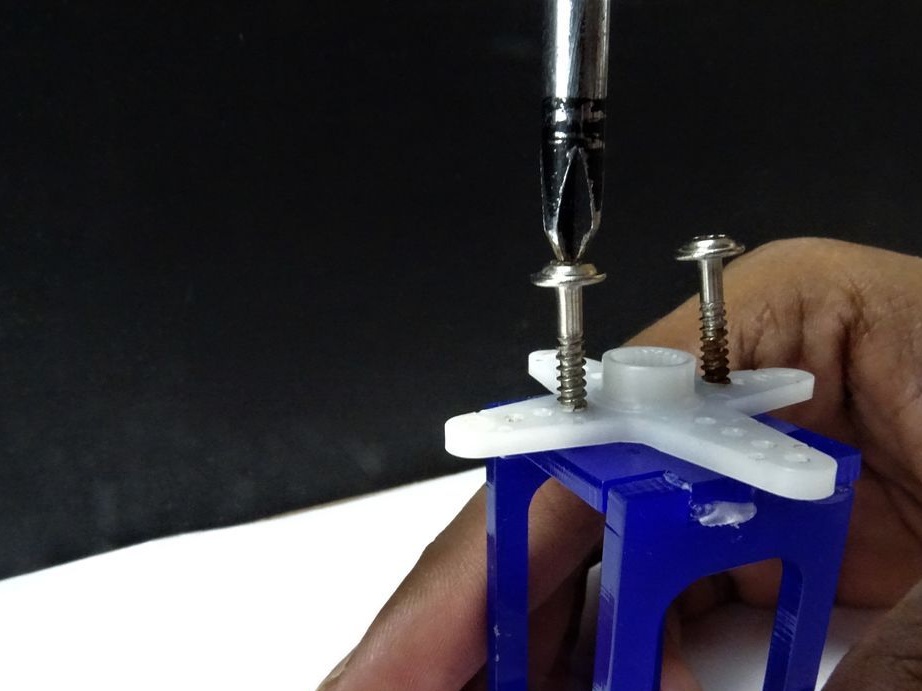
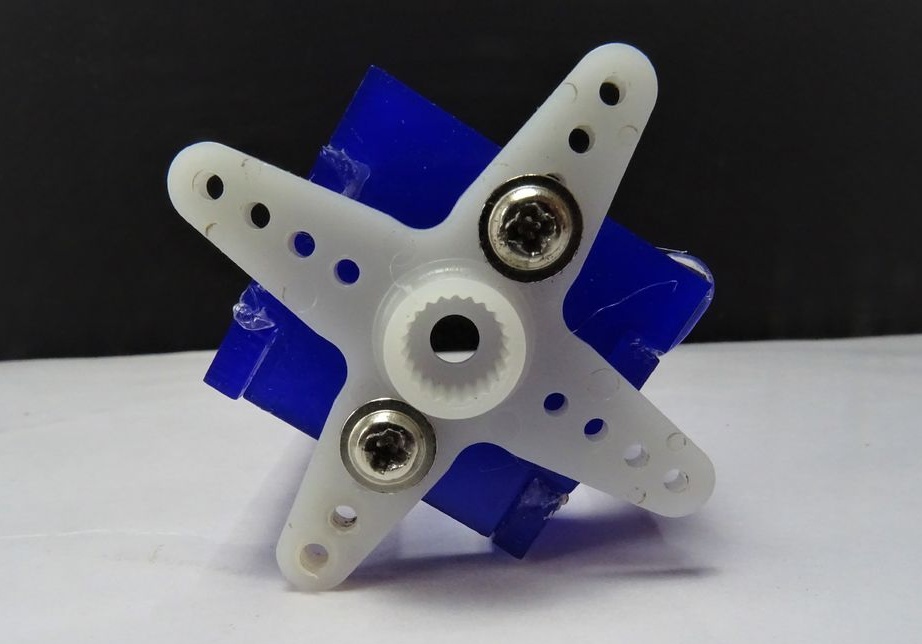
Auf Schrauben sammelt sich zwei Felgen. Die Schrauben sind nicht fest angezogen.




Zwischen den Scheiben werden Schrauben angebracht und die Schrauben festgezogen. Bei der Installation der Schraube müssen Sie die Schablone zum Zentrieren verwenden.
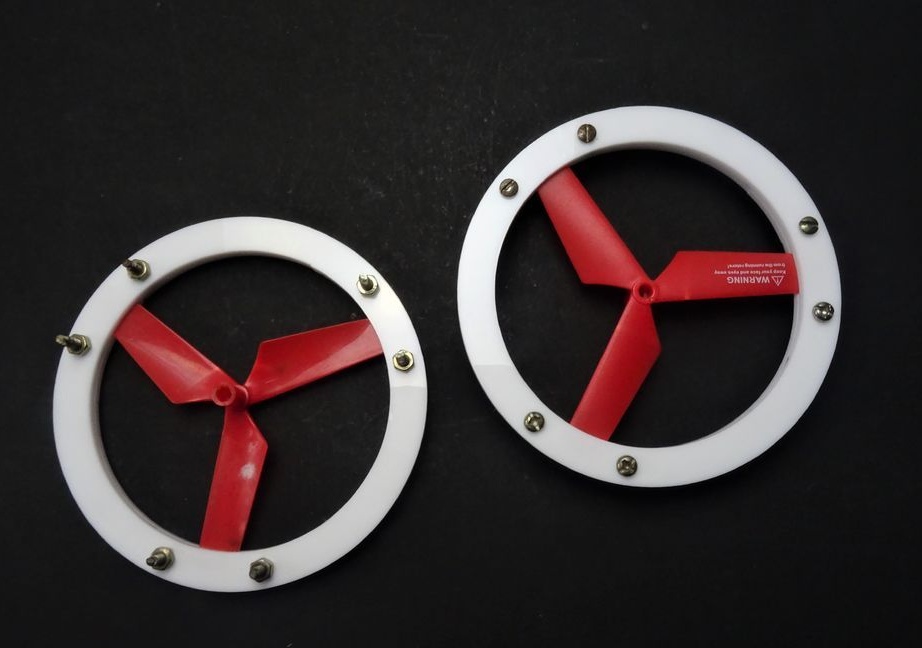
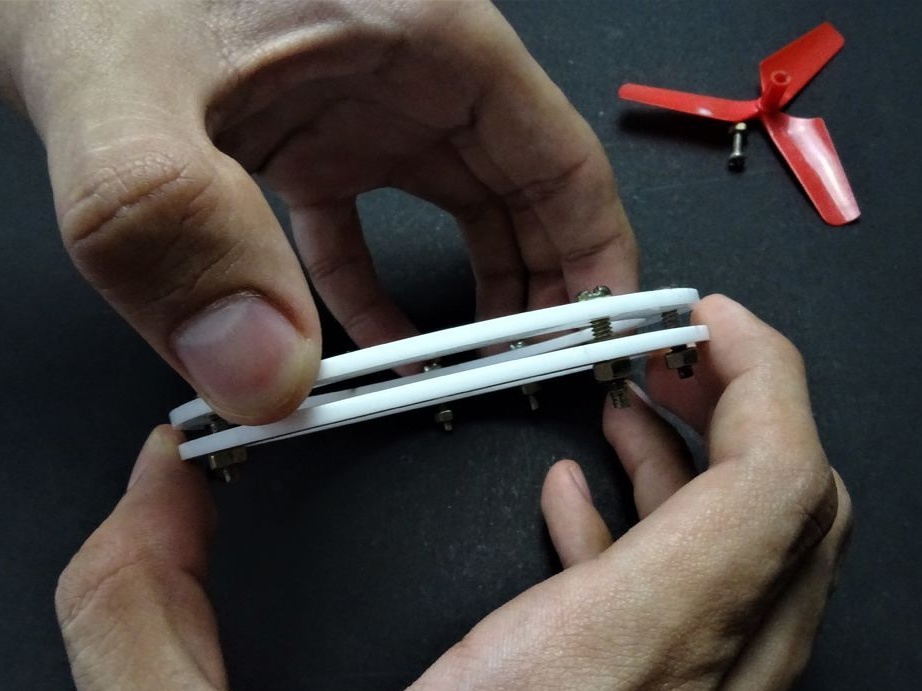
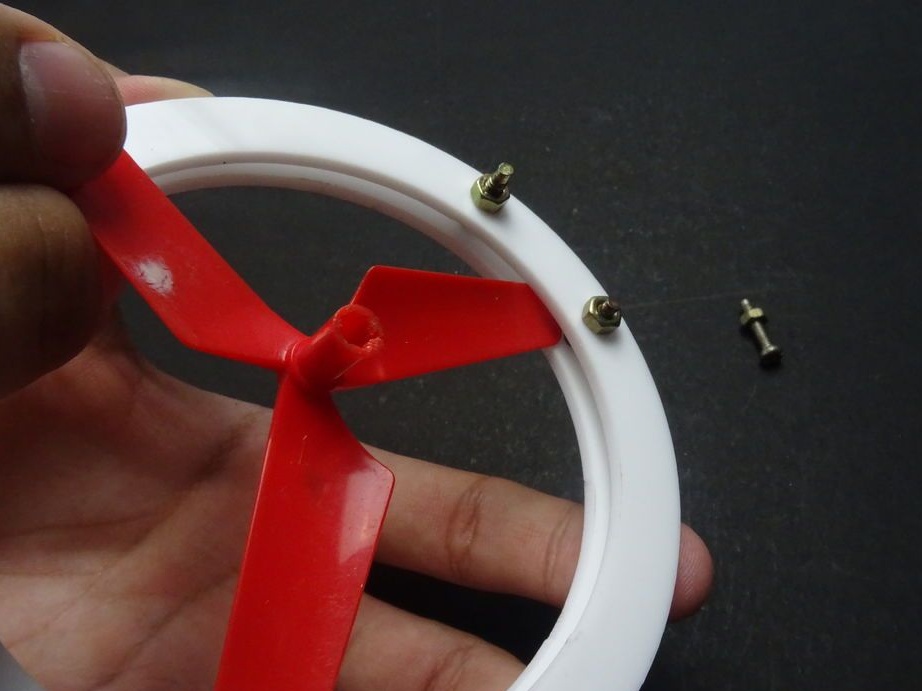
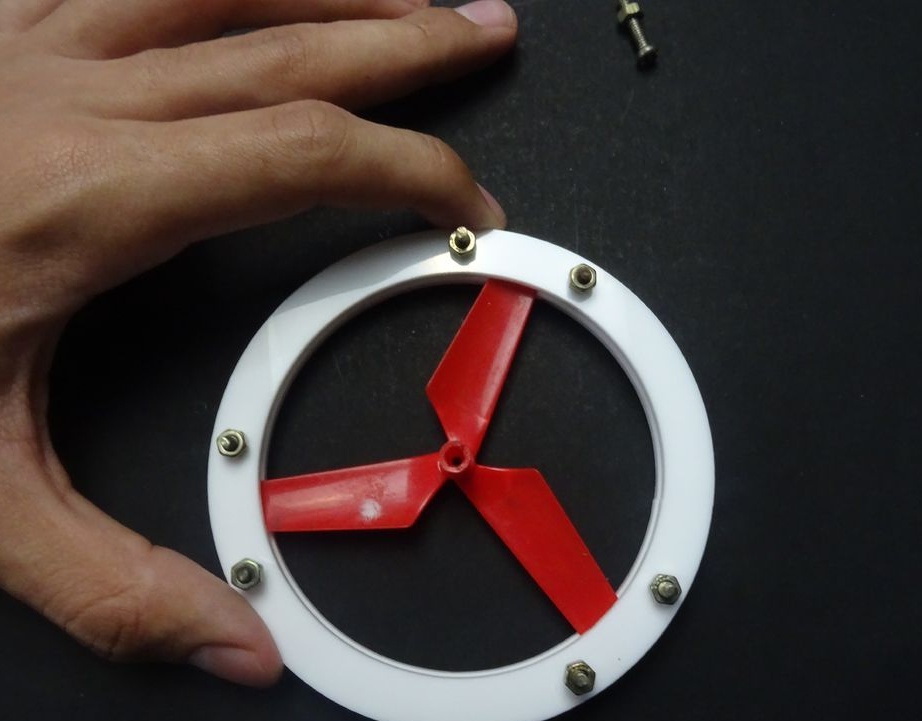
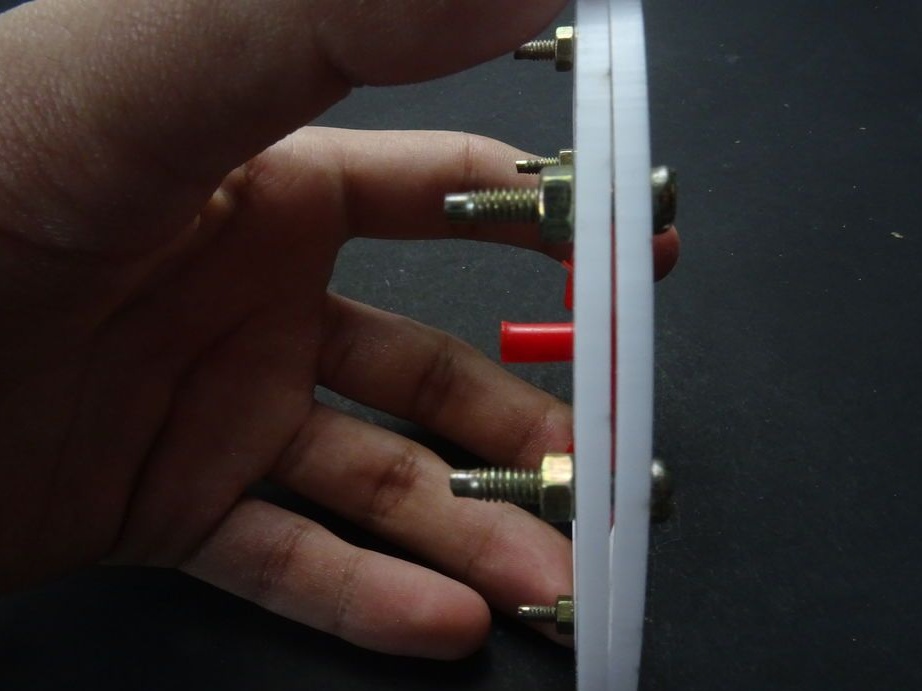

Legt die äußere Felge des Rades fest. Die Felge muss bündig mit der internen Scheibe sein.
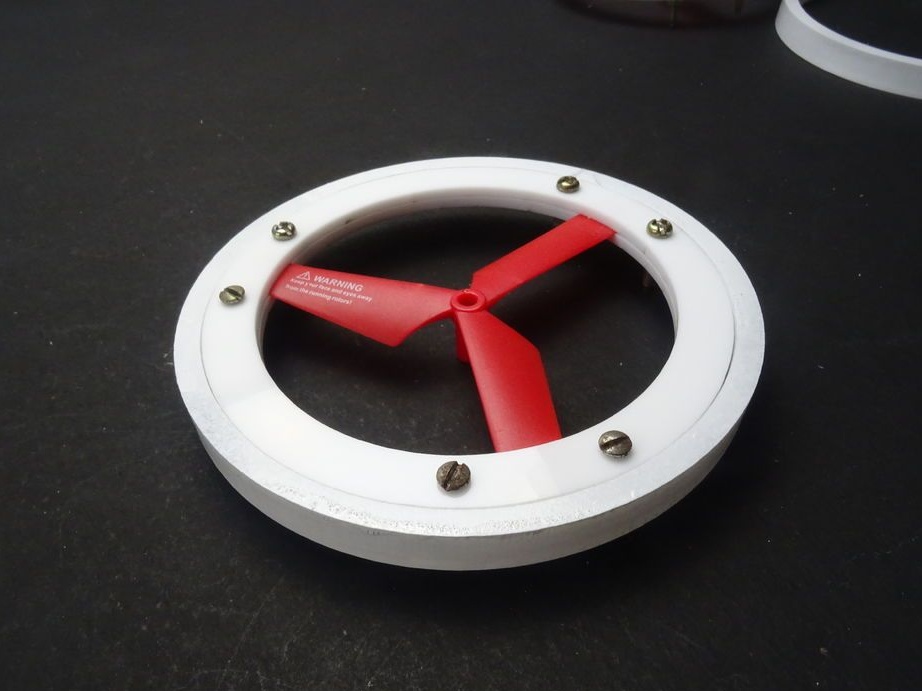

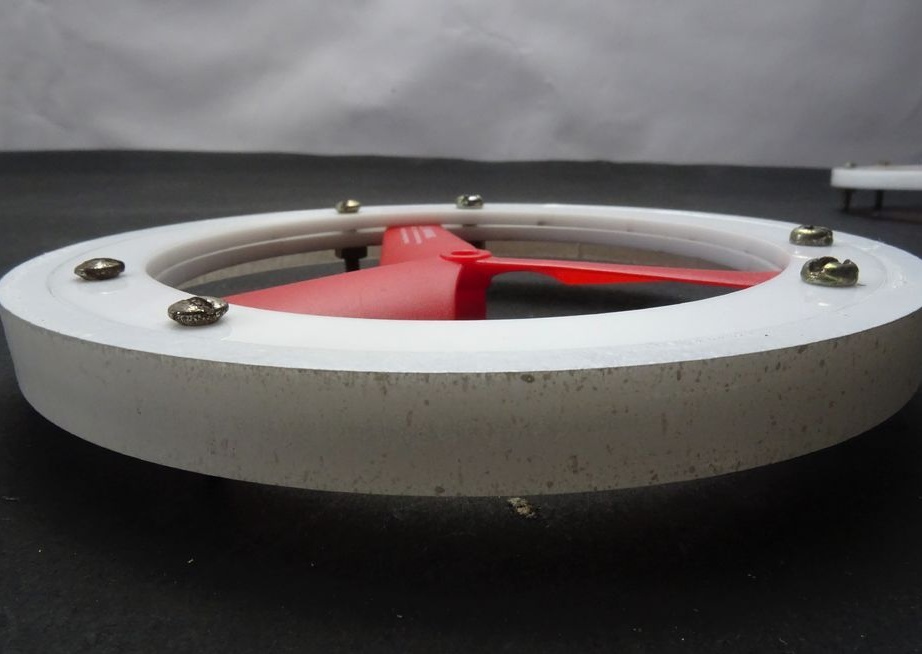

Tragen Sie Heißkleber auf die Fuge auf.


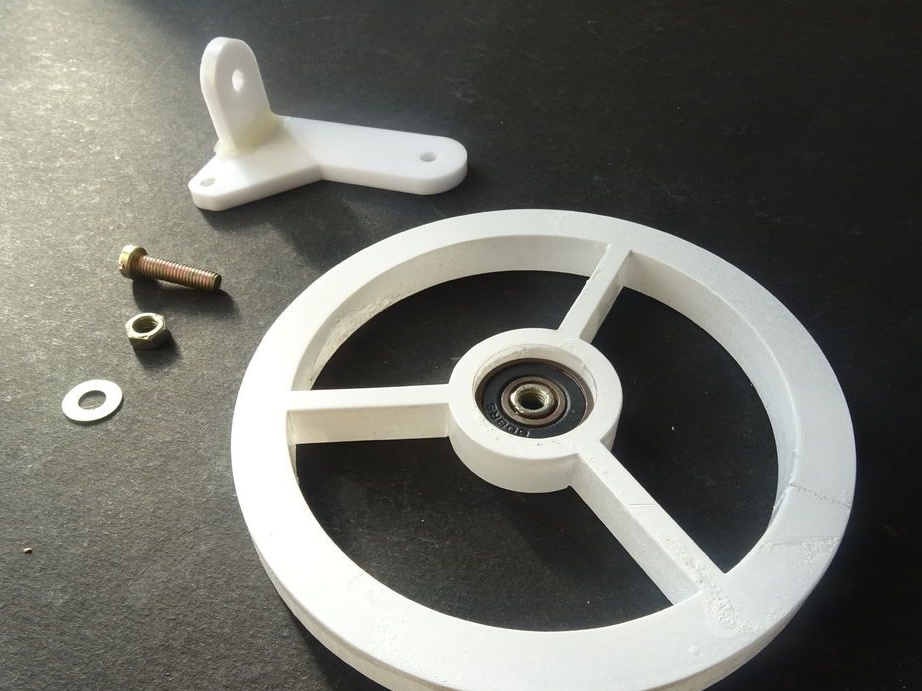
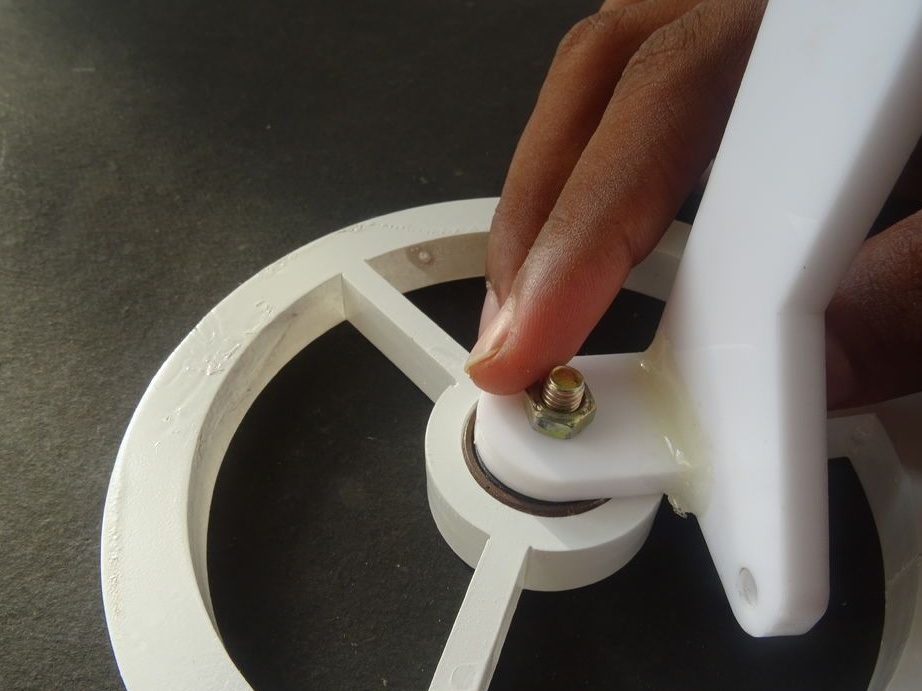
Sammelt jetzt die Vorderräder.
Eine Mutter geeigneter Größe verstopft den Innenring des Lagers. Drückt Lager in die Vorderräder.
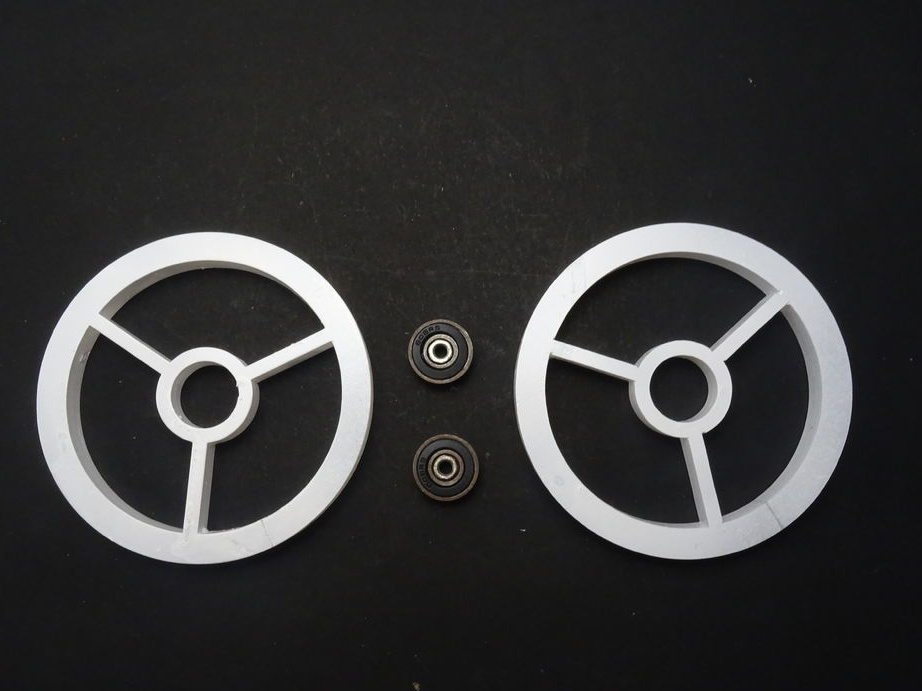



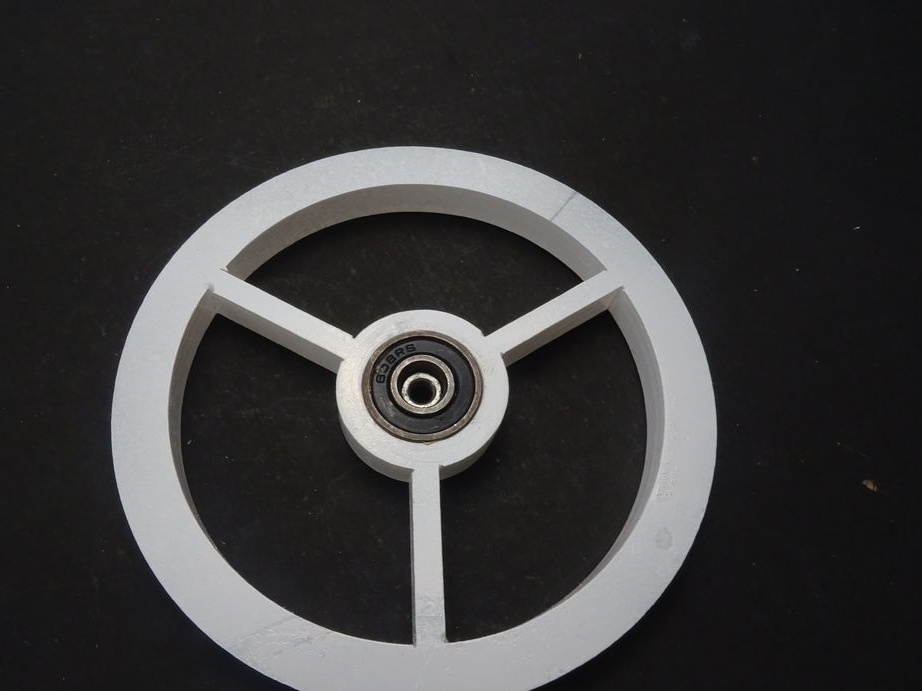
Die Räder sind fertig.

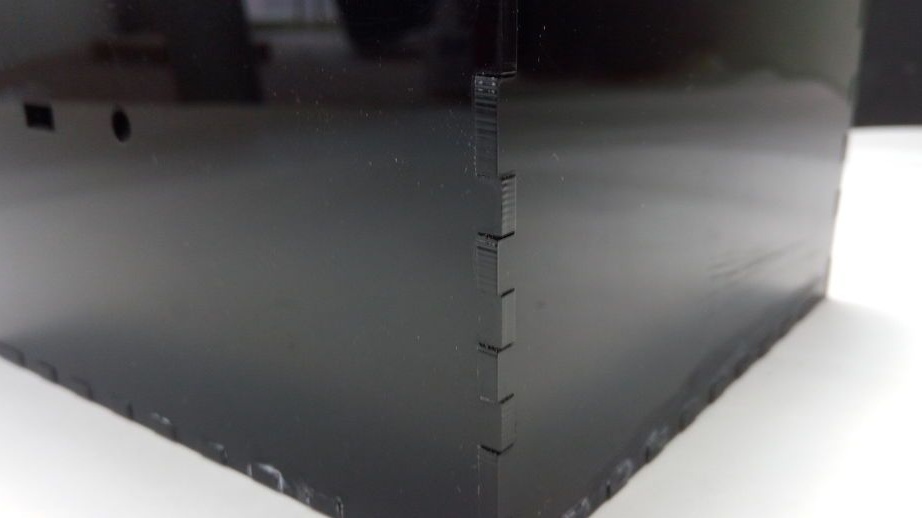
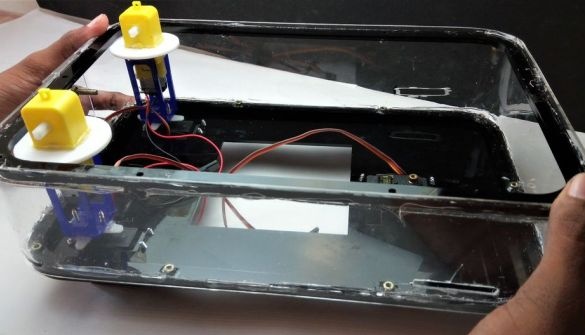
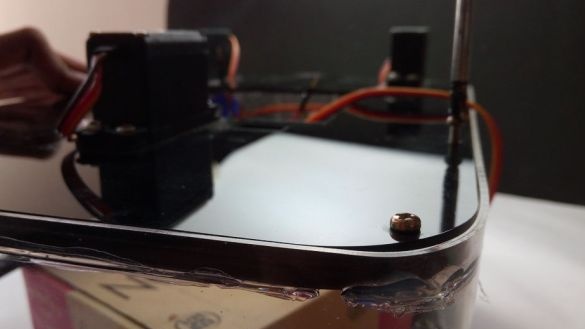
Schritt 12: Elektronikgehäuse
Klebt das Gehäuse für die Elektronik.
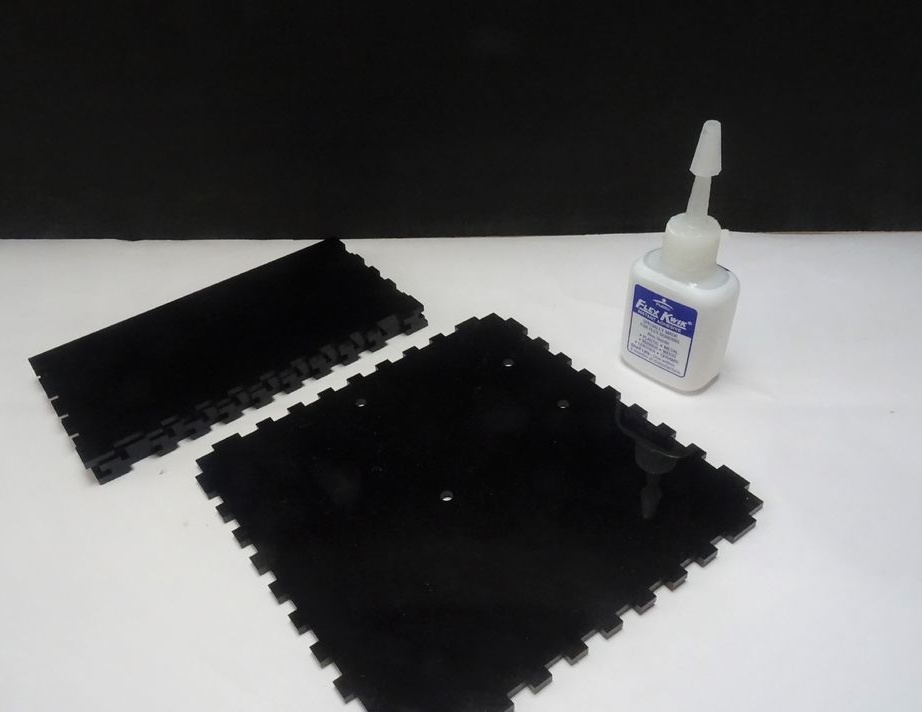
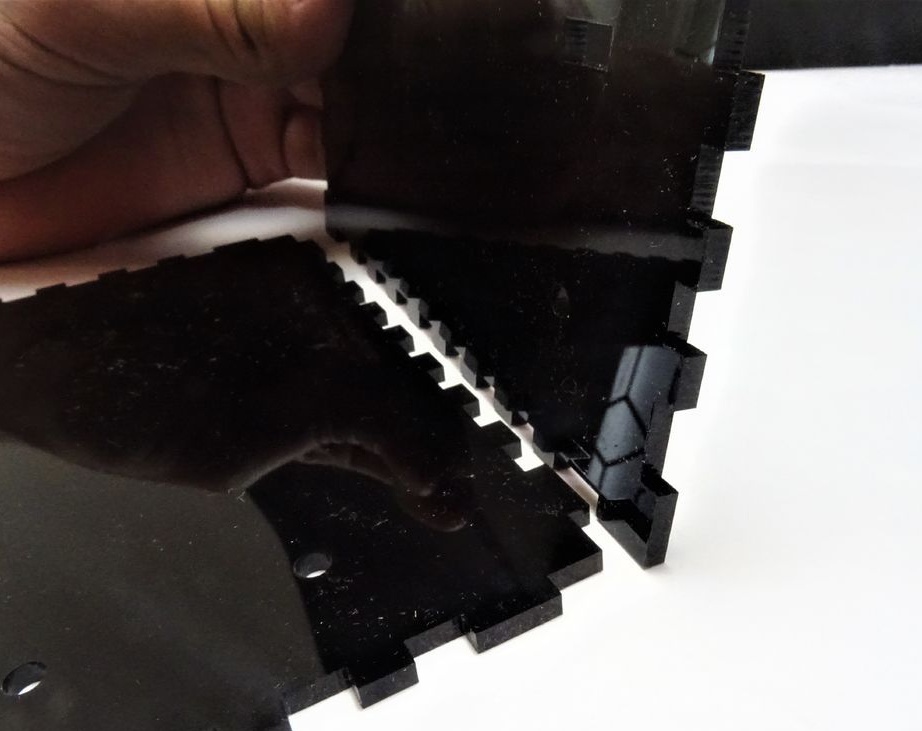

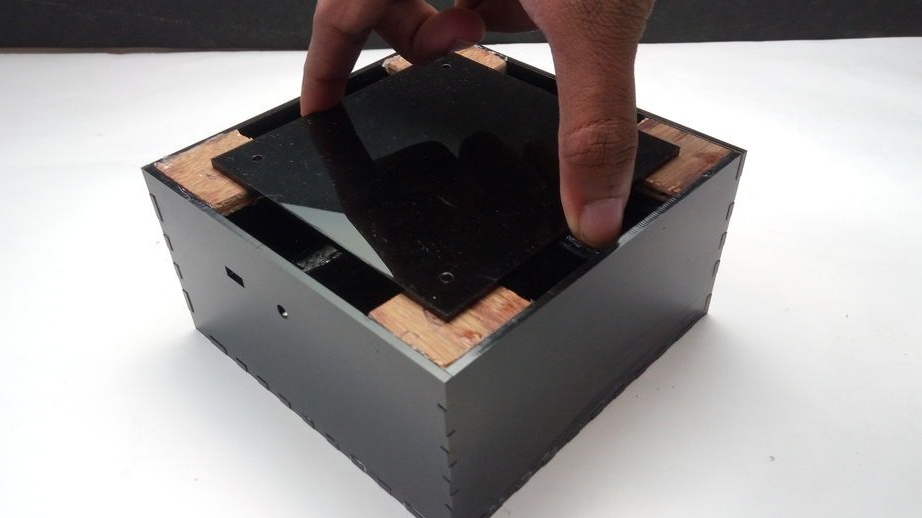
Diese Box enthält alles elektronisch Komponenten, was bedeutet, dass es so gründlich wie möglich wasserdicht gemacht werden muss.


In den Ecken der Schachtel werden vier Quadrate aus dem Brett geschnitten und geklebt. Der Kastendeckel wird daran befestigt.



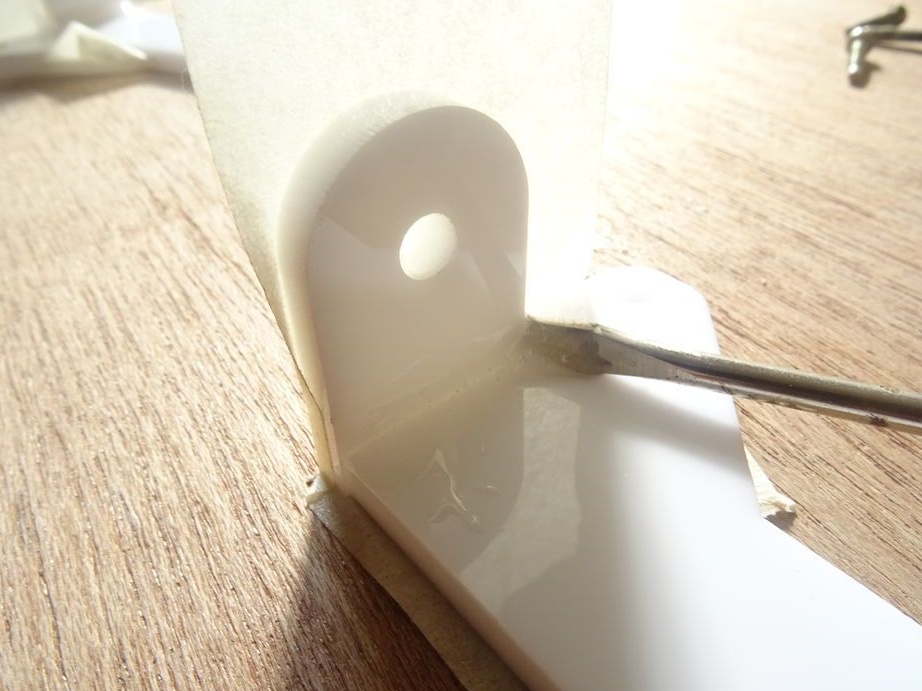
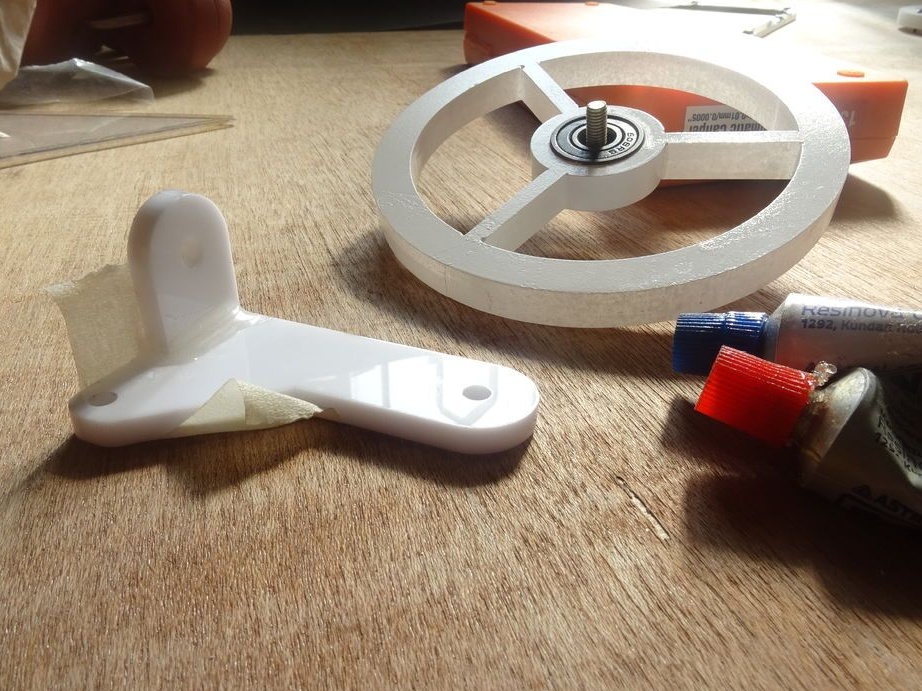
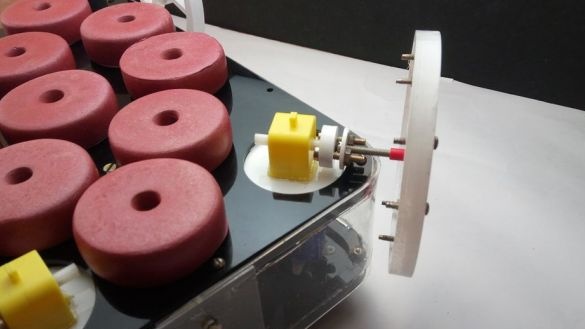
Schritt 13: Radhalterung
Jetzt müssen Sie die Räder und das Getriebe mit einer Kupplung verbinden.





Schrauben Sie die Vorderräder auf Traktion.


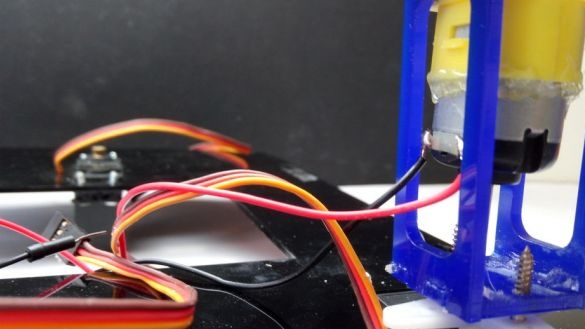
Schritt 14: Elektronik anschließen
Gemäß dem Schema werden elektrische Teile installiert.
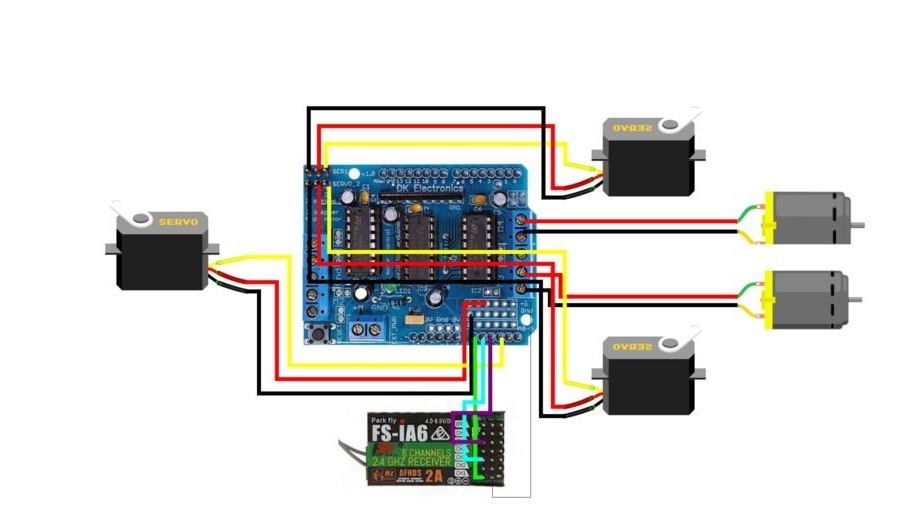

Die Drähte des linken Motors zu M1, die rechten zu M2. Verbindet einen Motortreiber. Verbindet Servos. Installiert den Empfänger: gnd des Empfängers zu gnd Arduino; +5 V Empfänger auf +5 V Arduino; Pin 3 bis A0; Pin 1 bis A1; Pin 5 bis A2. Verbindet den Akku.
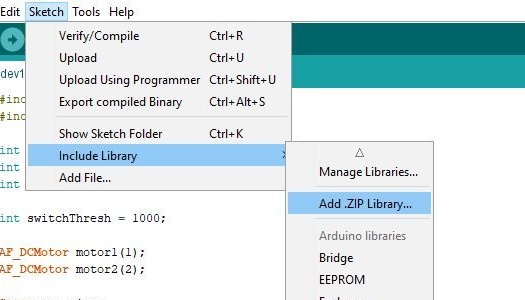
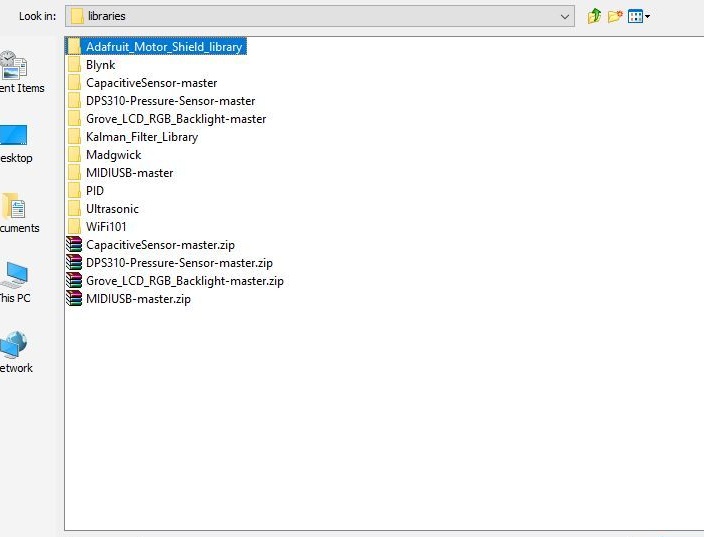
Schritt 15: Code herunterladen
Zuerst müssen Sie herunterladen die Bibliothek.
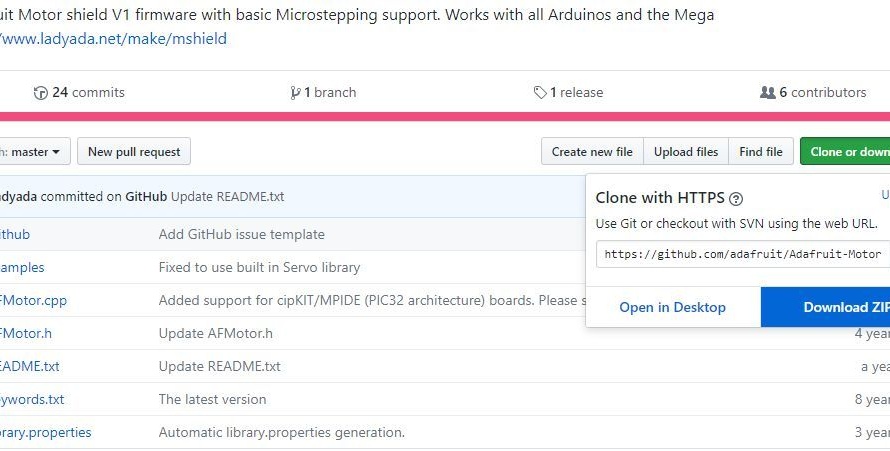
Laden Sie als Nächstes den Code herunter. Beim Laden sollte die Batterie abgeklemmt werden.
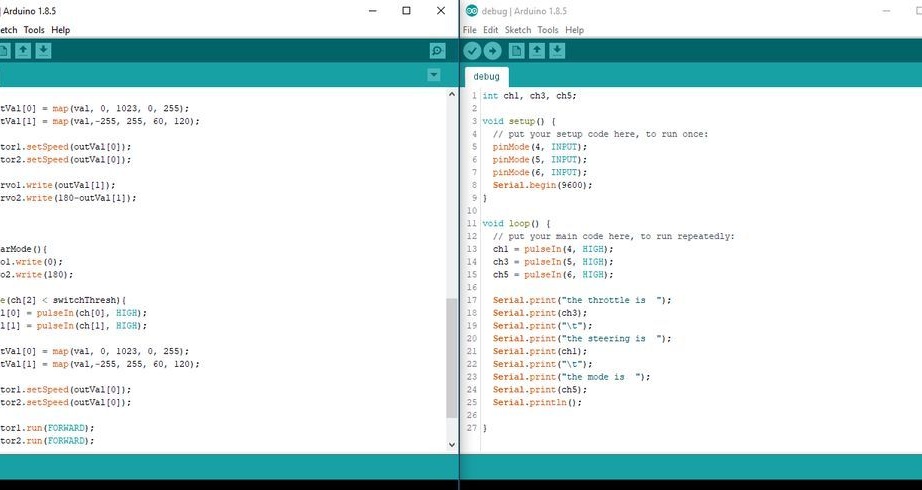
Laden Sie den folgenden Code herunter.
amphibious_rover_code.ino
Nach dem Herunterladen des Codes wird die Funktion von Motoren und Antrieben überprüft.
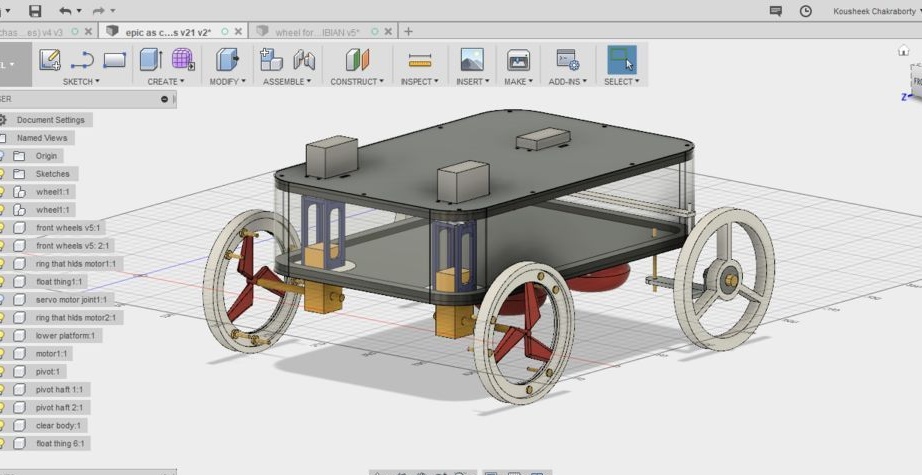
Schritt 16: Montage
Jetzt ist es Zeit, das Geländewagen zusammenzubauen.
[Mitte[/ center]
Installiert Servos. Installiert Getriebemotoren.

Befestigt die Räder. Dreht beide Körperhälften.






Alles ist fertig und jetzt können Sie testen.