


Also, Lego-Technik von meinem Sohn nehmen und zu Hause Arduino Nano begann diese Designer zu kombinieren.
Wir werden brauchen:
- Lego-Technik (Kits 42029 und 42033)
- Arduino Nano (Link zum Board)
- DRV 8833
- 2 Servoantriebe SG-90
- IR-Empfänger
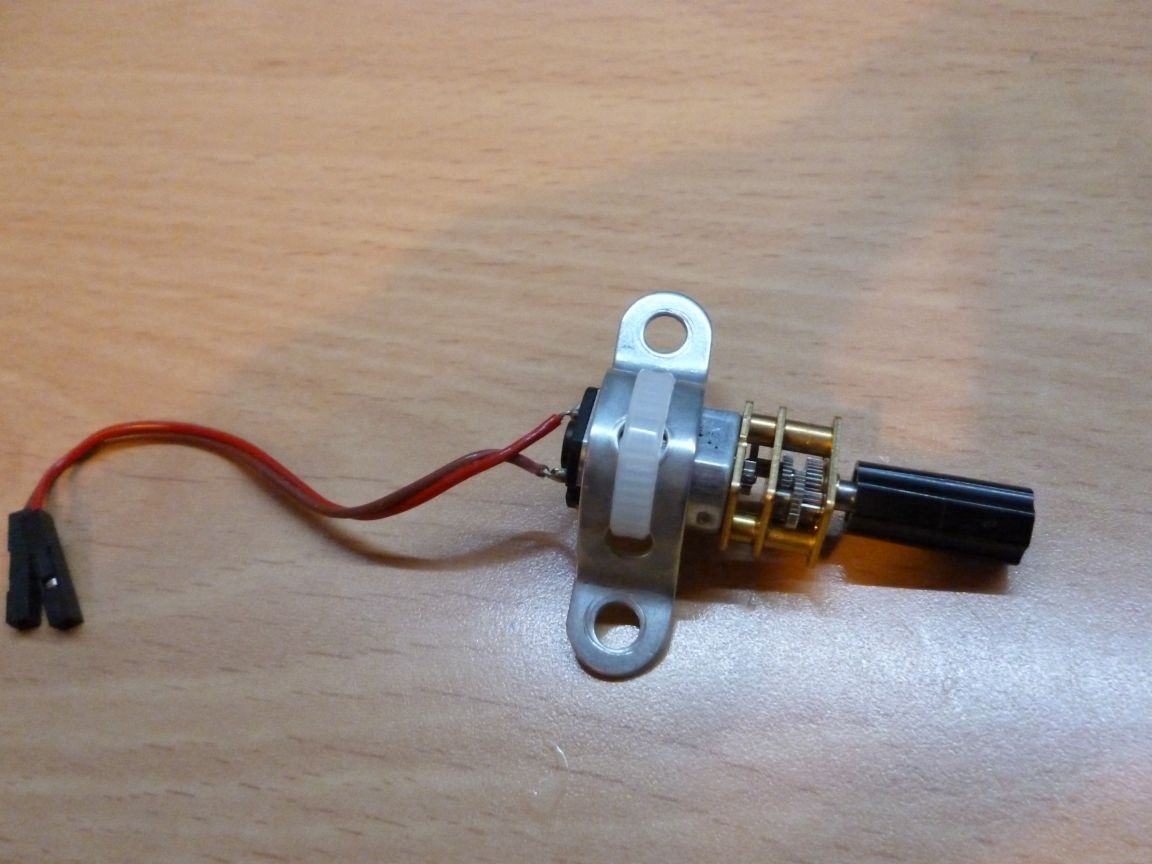
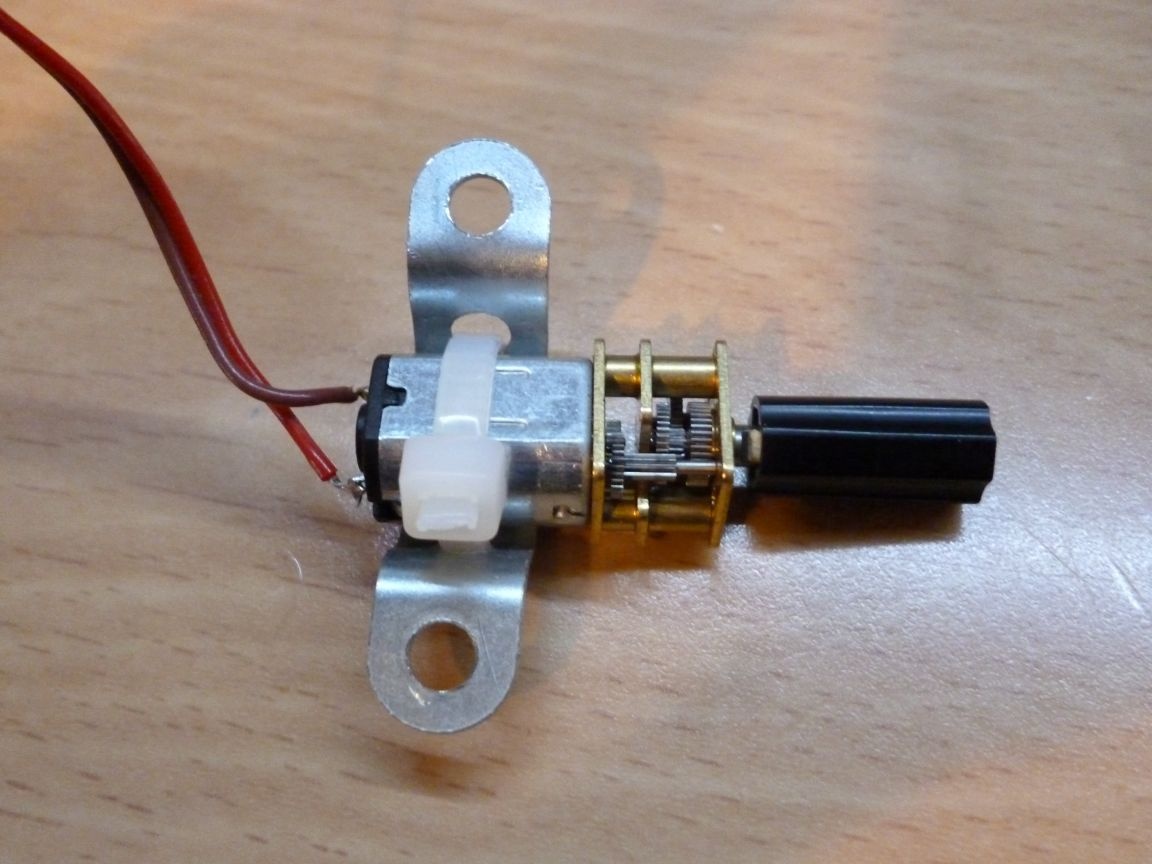
- Getriebemotor
- 2 LEDs
- 2 Widerstände 150 Ohm
- Kondensator 10v 1000uF
- 2 einreihige Kämme PLS-40
- 2 PBS-20-Anschlüsse
- Induktor 68mkGn
- 4 NI-Mn 1,2 V 1000 mA Batterien
- Stecker Papa-Mama zwei Pin zum Draht
- Homutik
- Drähte in verschiedenen Farben
- löten
- Kolophonium
- Lötkolben
- Schrauben 3x40 und Muttern und Unterlegscheiben für sie
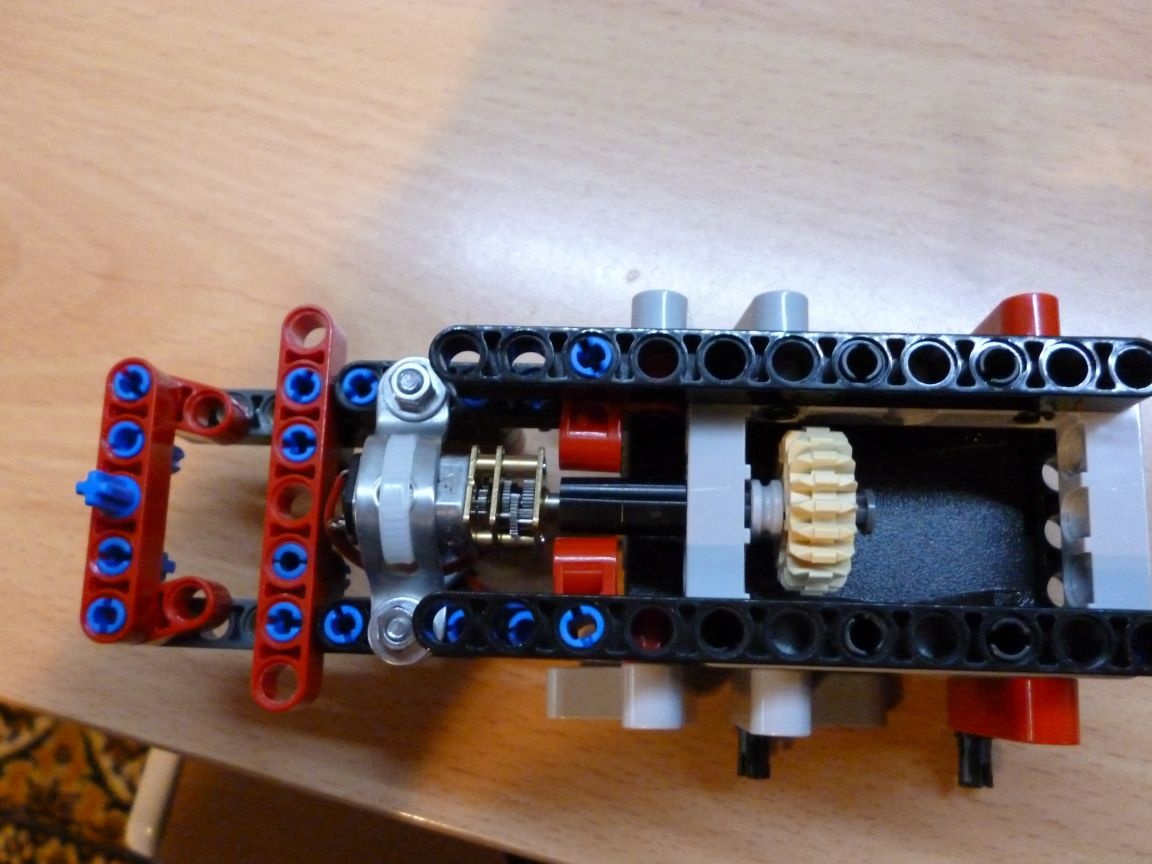
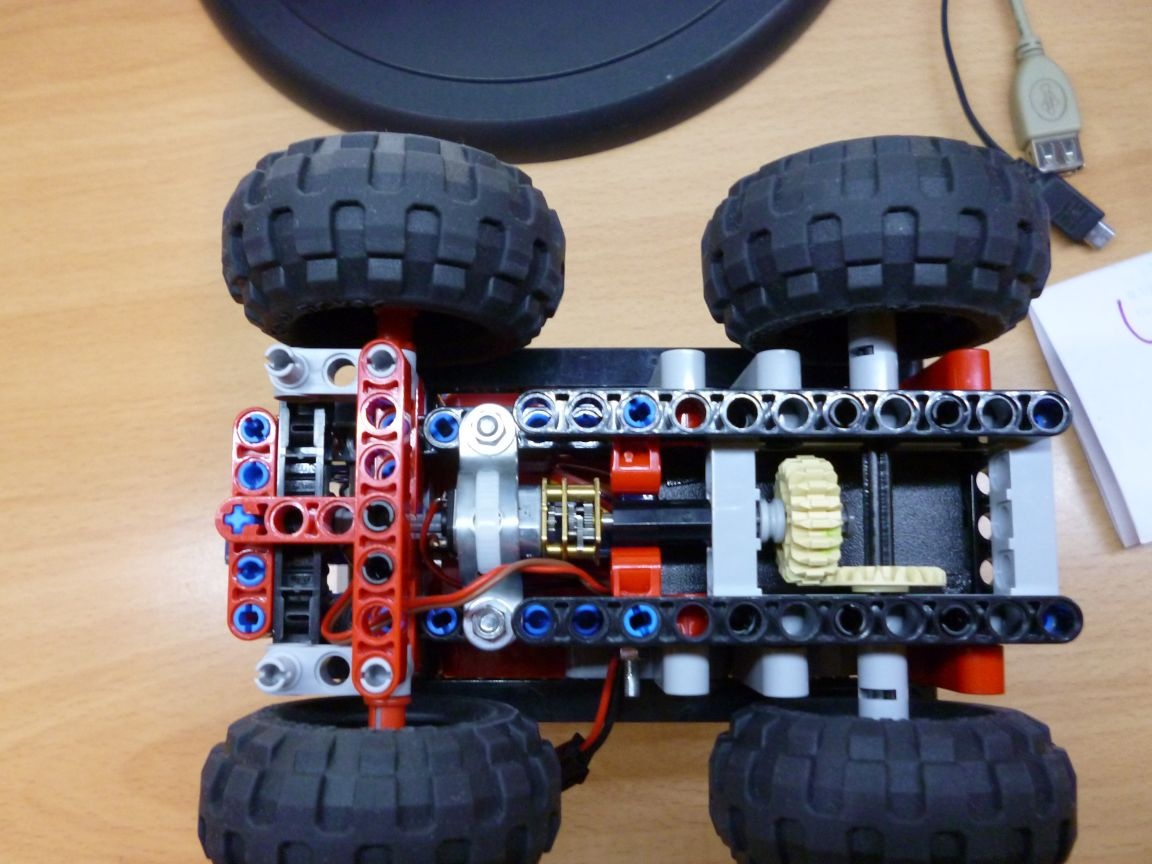
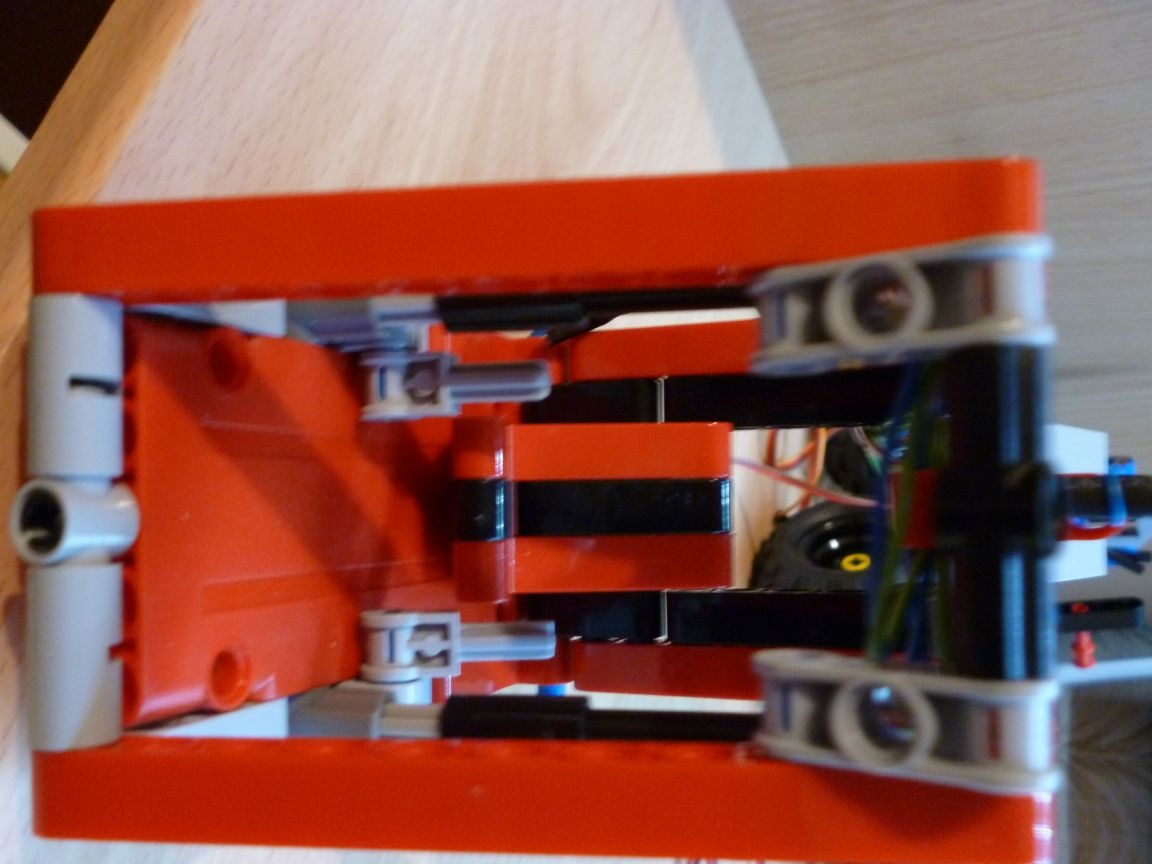
Schritt 1 Montieren Sie das Fahrgestell und die Antriebsachse.
Sie können jedes Chassis von Technic zusammenbauen, es stellte sich jedoch so heraus.
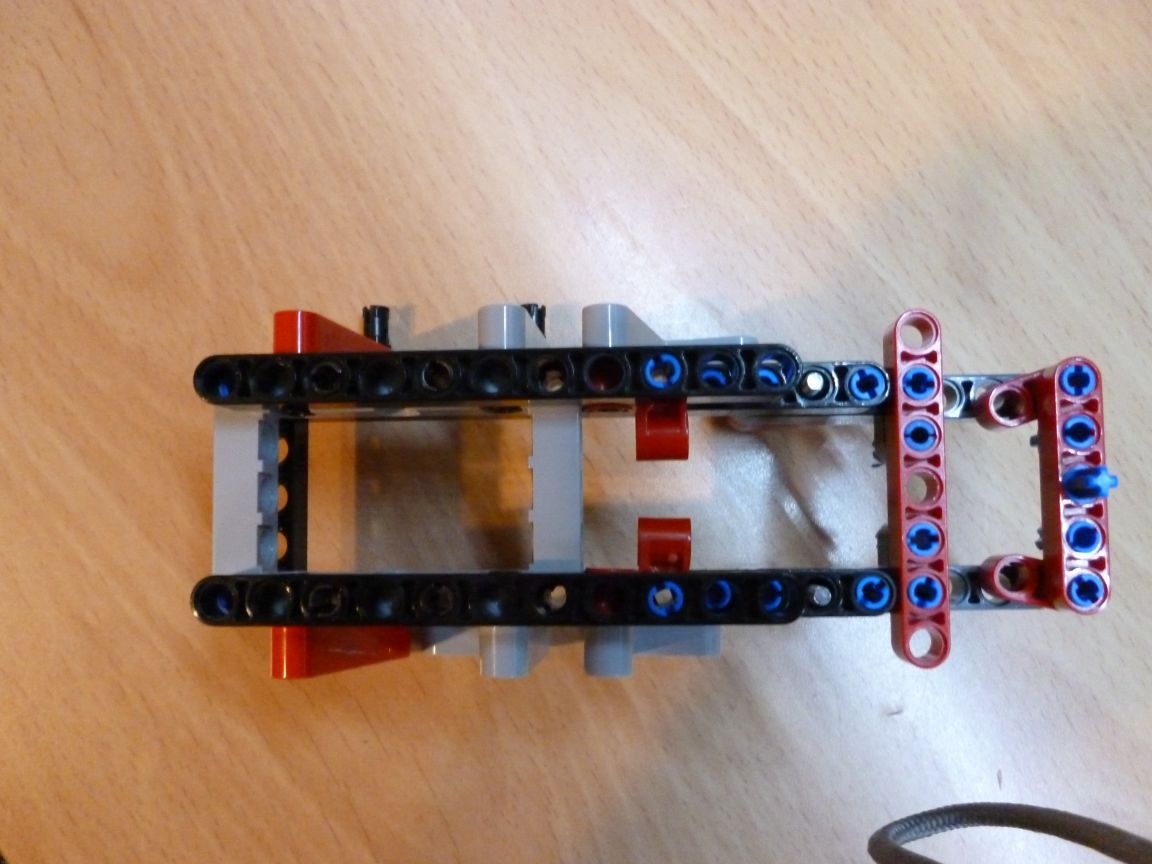
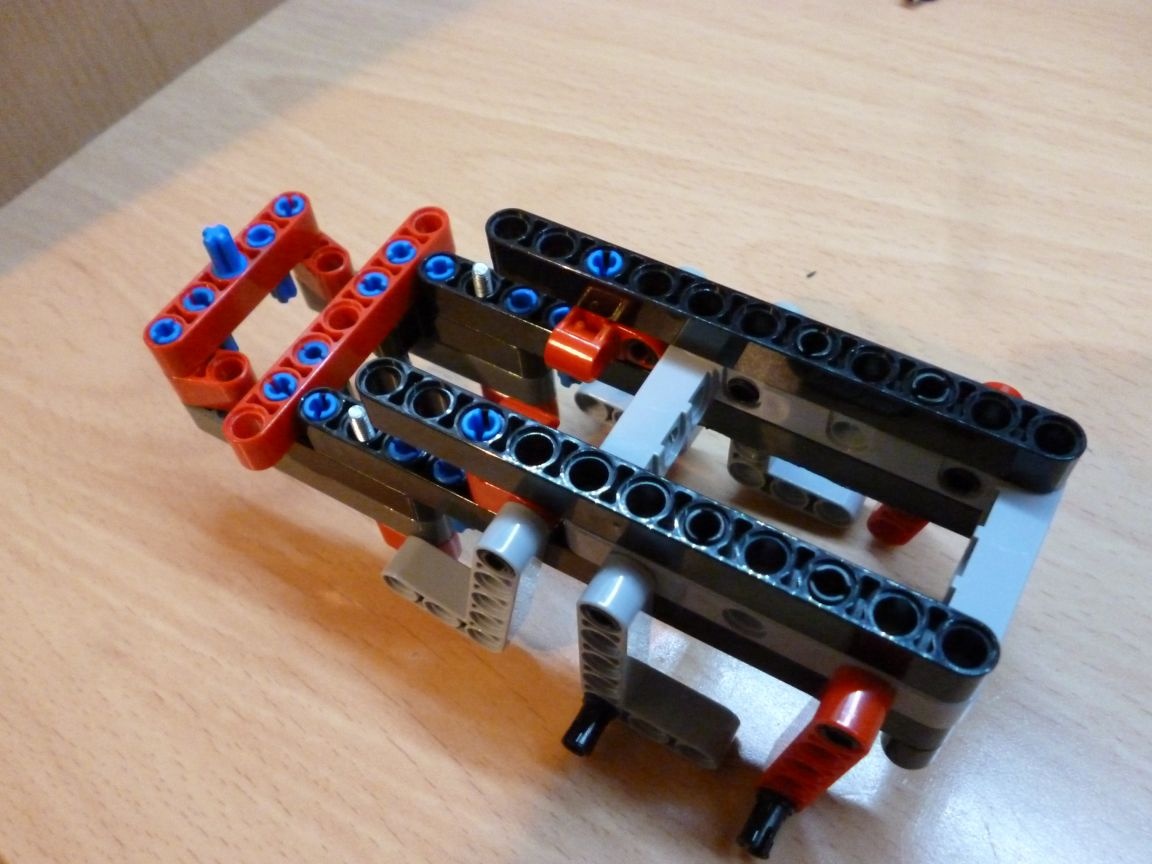
Es besteht nur das Problem, den Getriebemotor mit den Teilen des Konstrukteurs zu verbinden. Ich entschied mich wie folgt: Setzen Sie auf die Achse des Getriebemotors eine Verbindungshülse und steckten Sie ein Stück Streichholz zur Fixierung ein. Für die Montage des Getriebemotors wurde Metallkunststoff von einem Eisenkonstrukteur und eine Klammer verwendet. Es stellte sich Folgendes heraus:
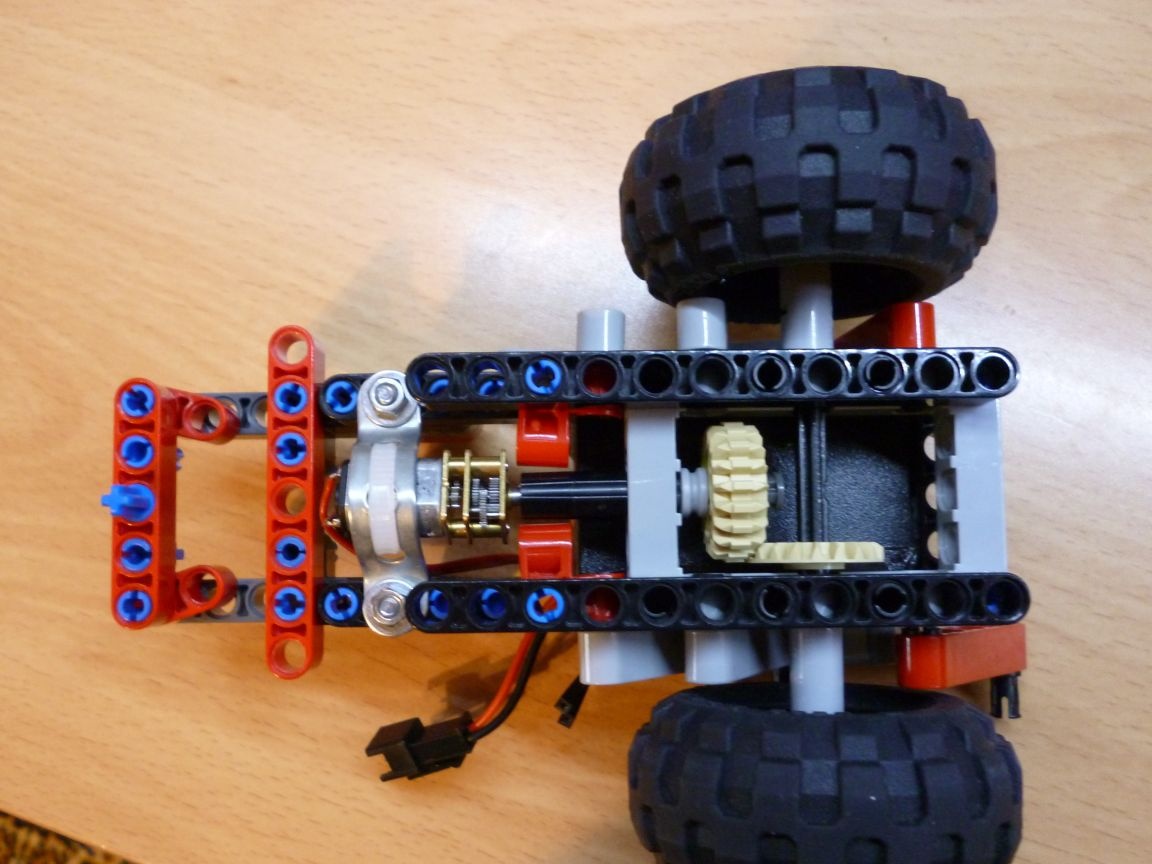
Als nächstes installieren wir das resultierende Design mit 3x40 Schrauben am Chassis:
Und auf die Räder setzen:
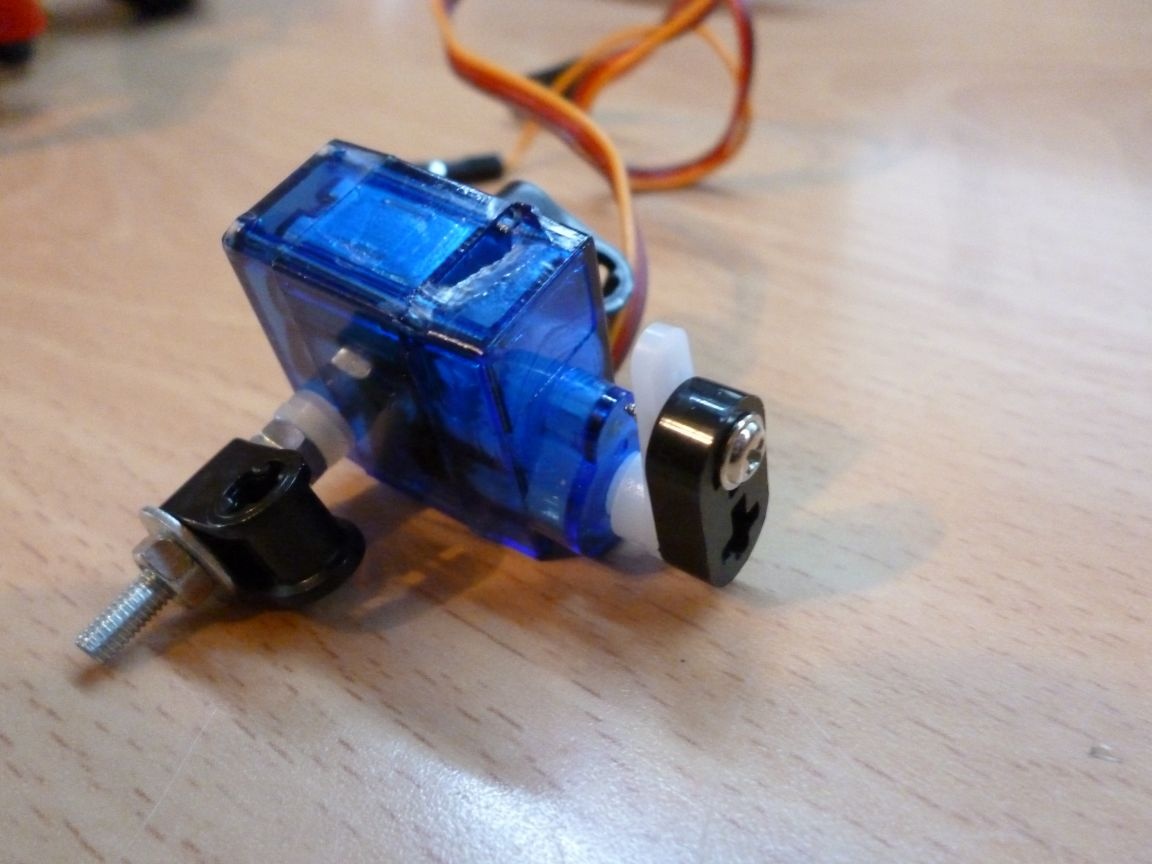
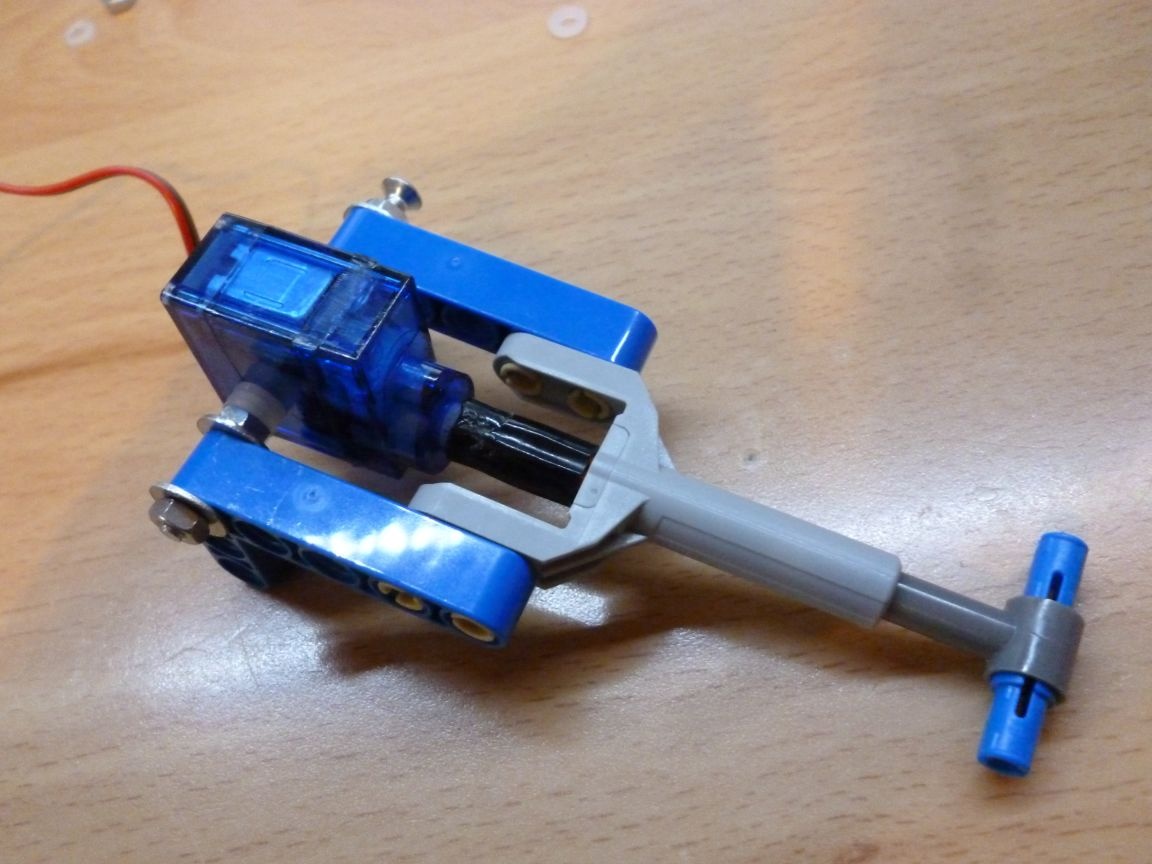
Schritt 2 Schwenkräder
Zur Durchführung der Drehung wurde das Servo SG-90 benötigt. Um die Innenteile nicht zu berühren, muss ein Durchgangsloch mit einem Durchmesser von 3,2 mm vorsichtig gebohrt oder einfach mit einem Schreibwarenmesser geschnitten werden.

Wir setzen eine Schraube in das Loch und die Ecken entlang der Kanten ein und befestigen sie mit Muttern:

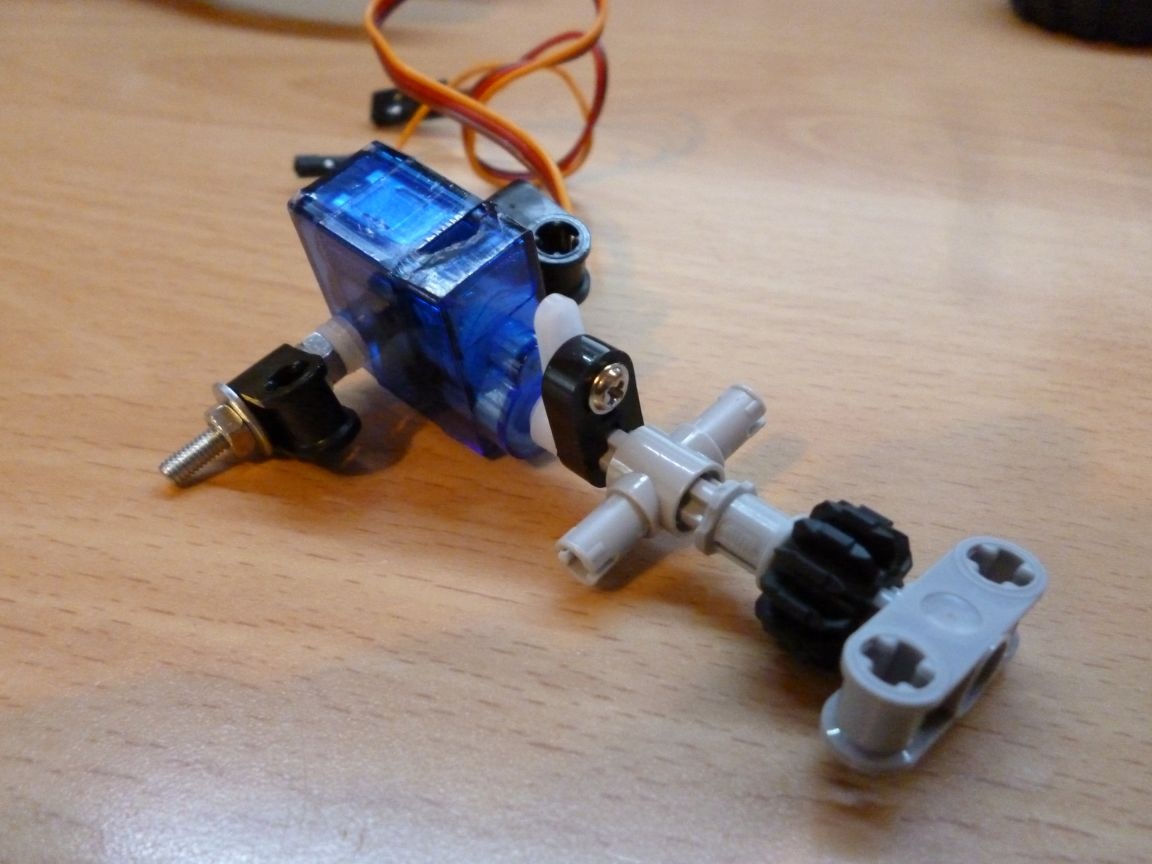
Auf der Servowelle setzen wir einen Hebel mit einem Schraubteil von lego auf:
Und zum Schluss die Schwenkbaugruppe:
Wir setzen das Chassis auf:

Auf die Räder setzen:
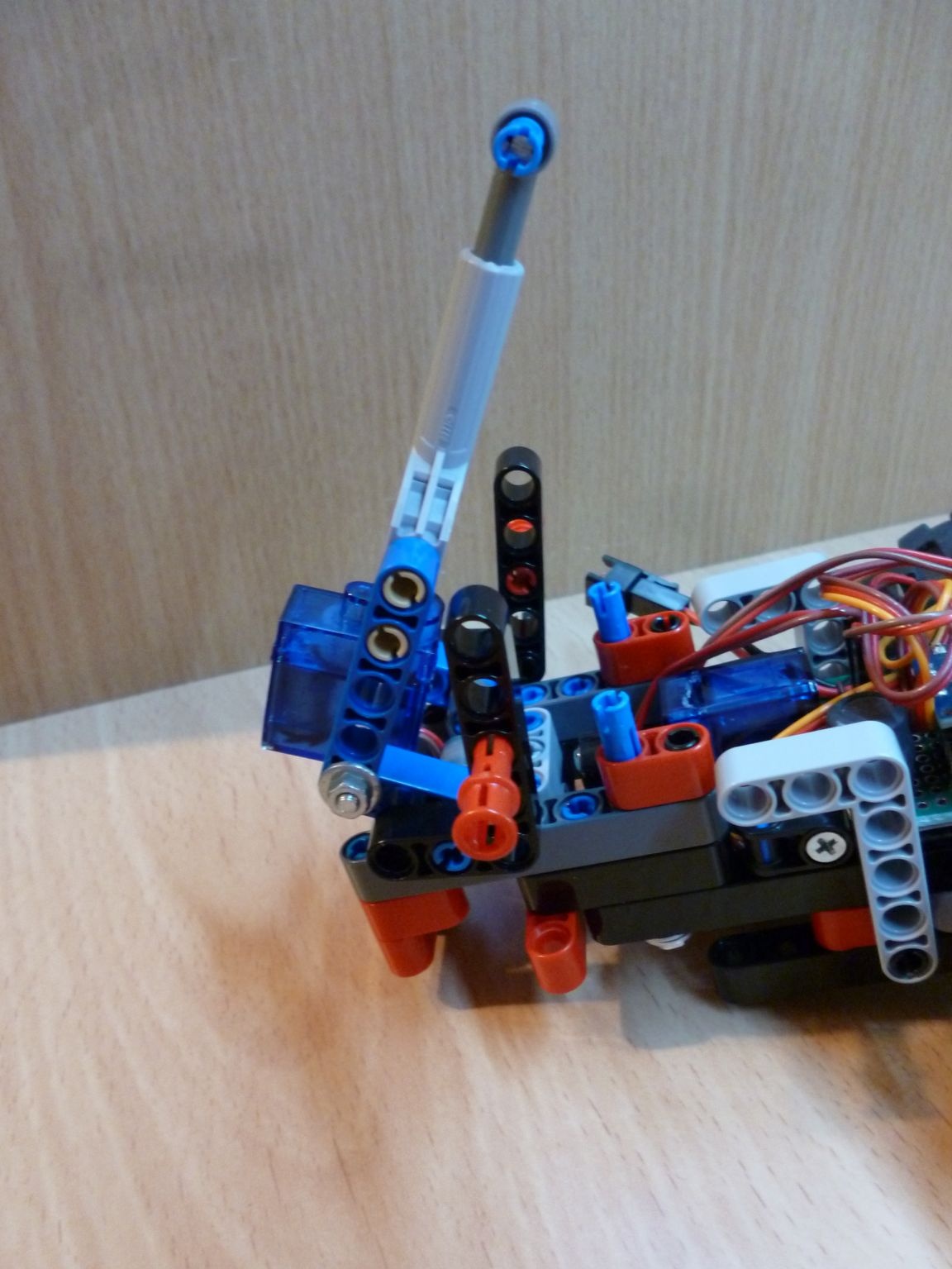
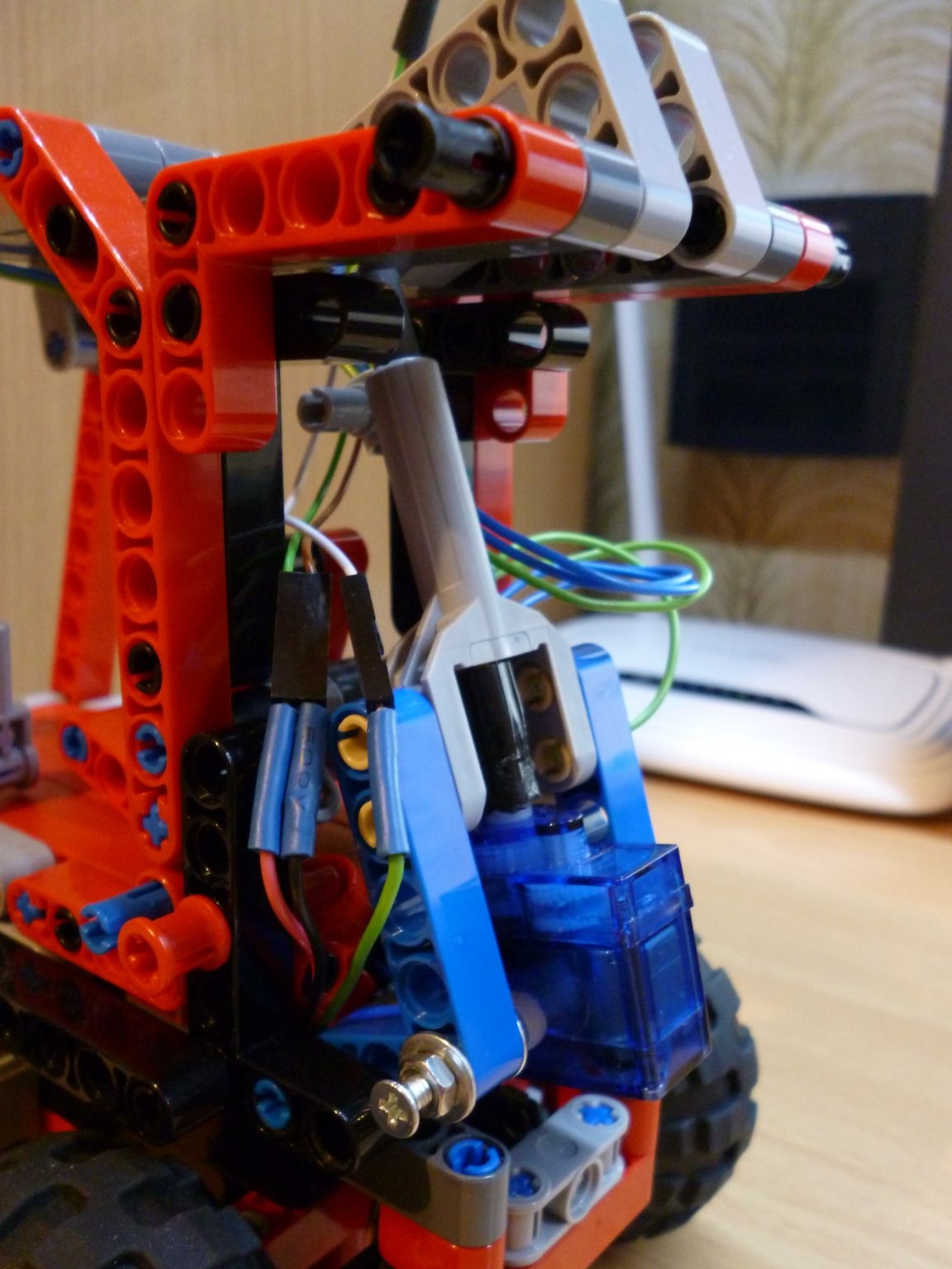
Schritt 3 Hebezeug.
Zum Anheben des Eimers wurde ein modifiziertes Servo SG-90 benötigt. Der Sinn seiner Modifikation besteht darin, den internen Controller zu entfernen und die Drähte direkt an den Motor anzulöten, um aus dem Servoantrieb einen Getriebemotor zu machen, das heißt, damit er sich vollständig drehen kann. Wie beim ersten Servo müssen Sie ein Durchgangsloch für die Montage machen:
Auf dem Chassis installieren:
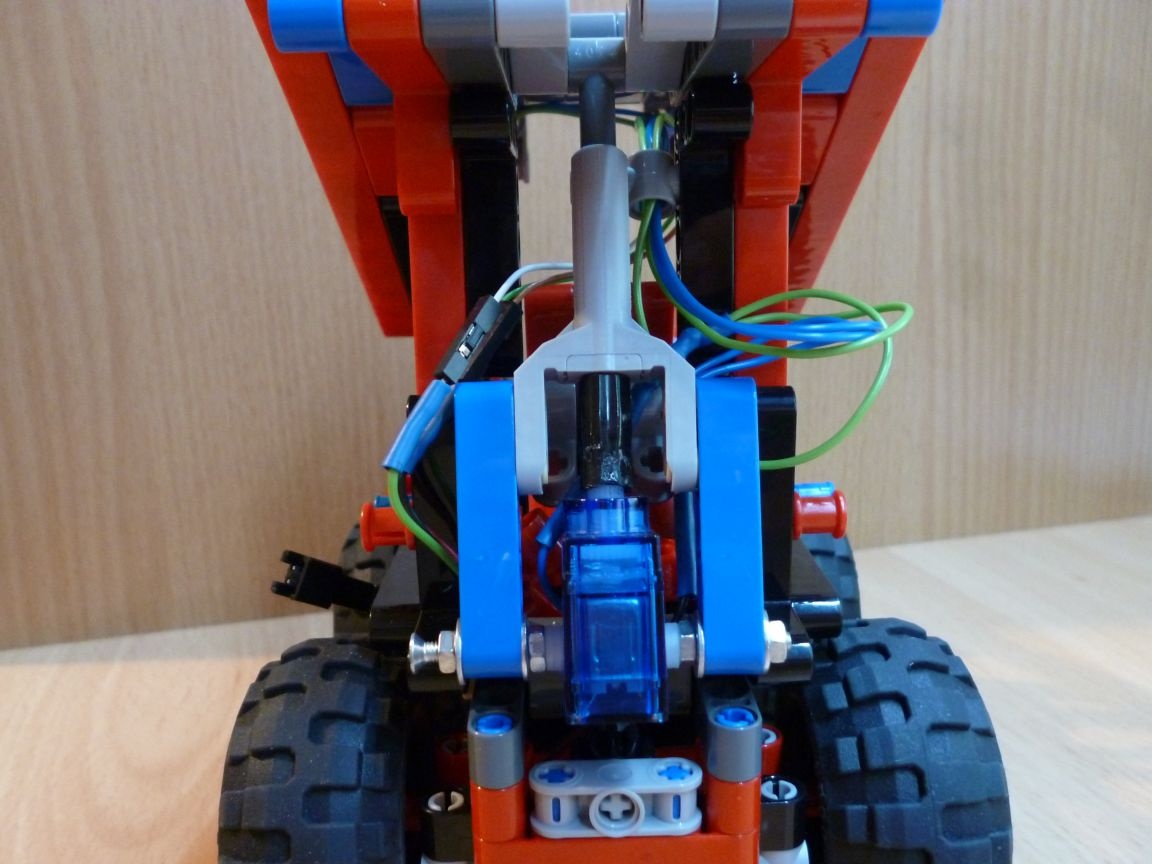
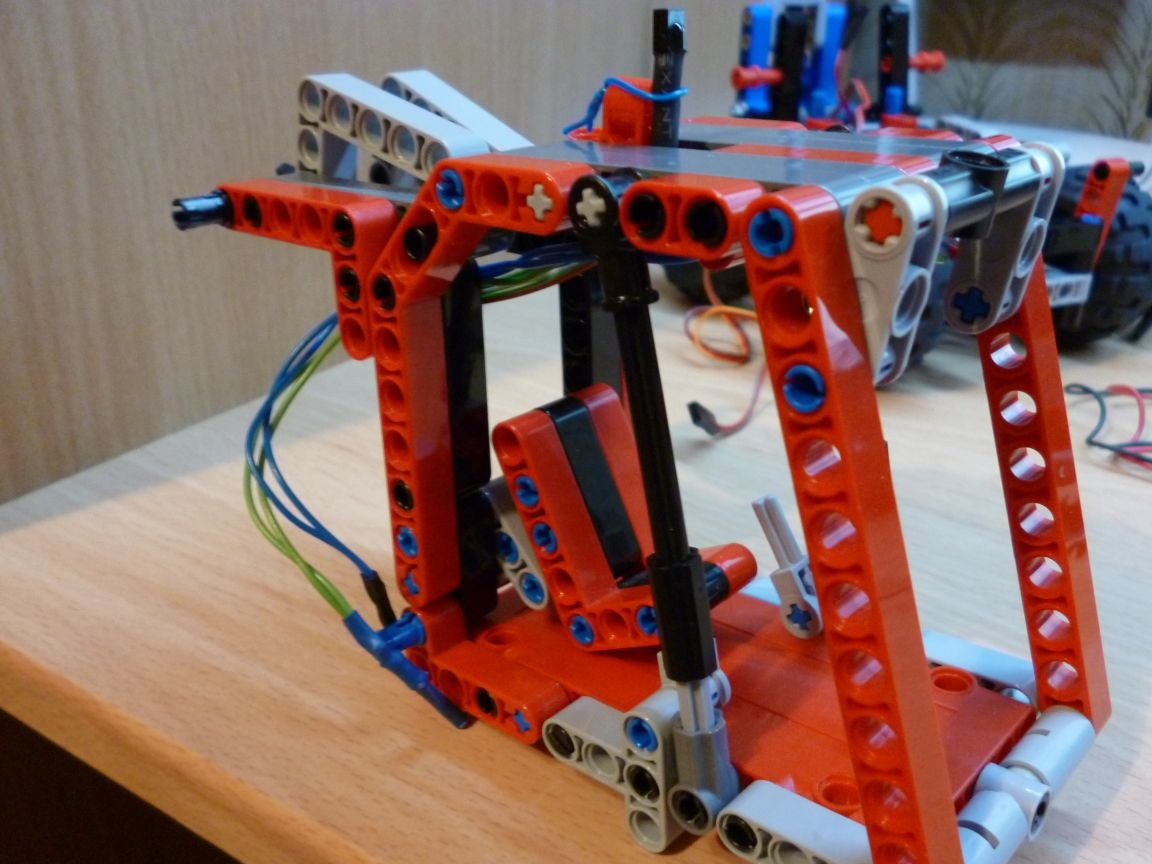
Schritt 4 Kabine.
Es ist notwendig, eine Kabine aus Legotechnik aus Fotos zusammenzubauen:

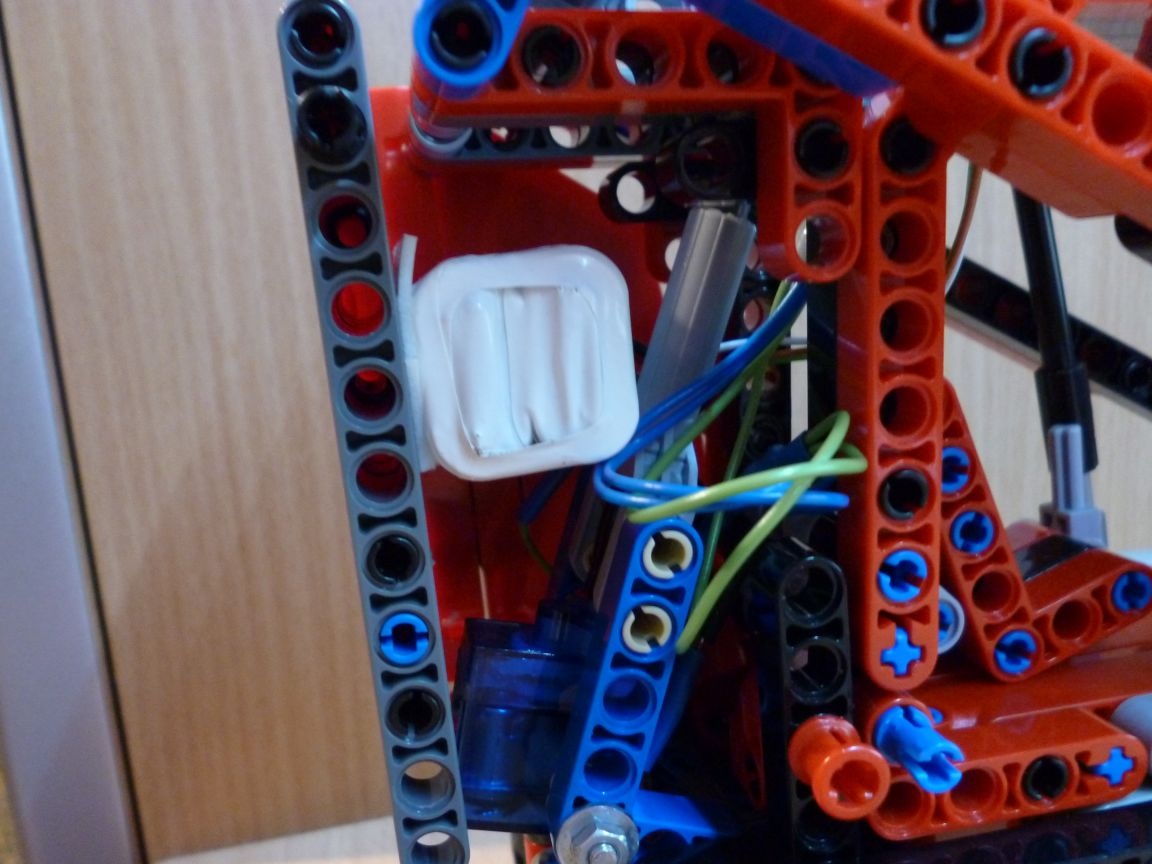
Schritt 5 ist ein Elektriker.
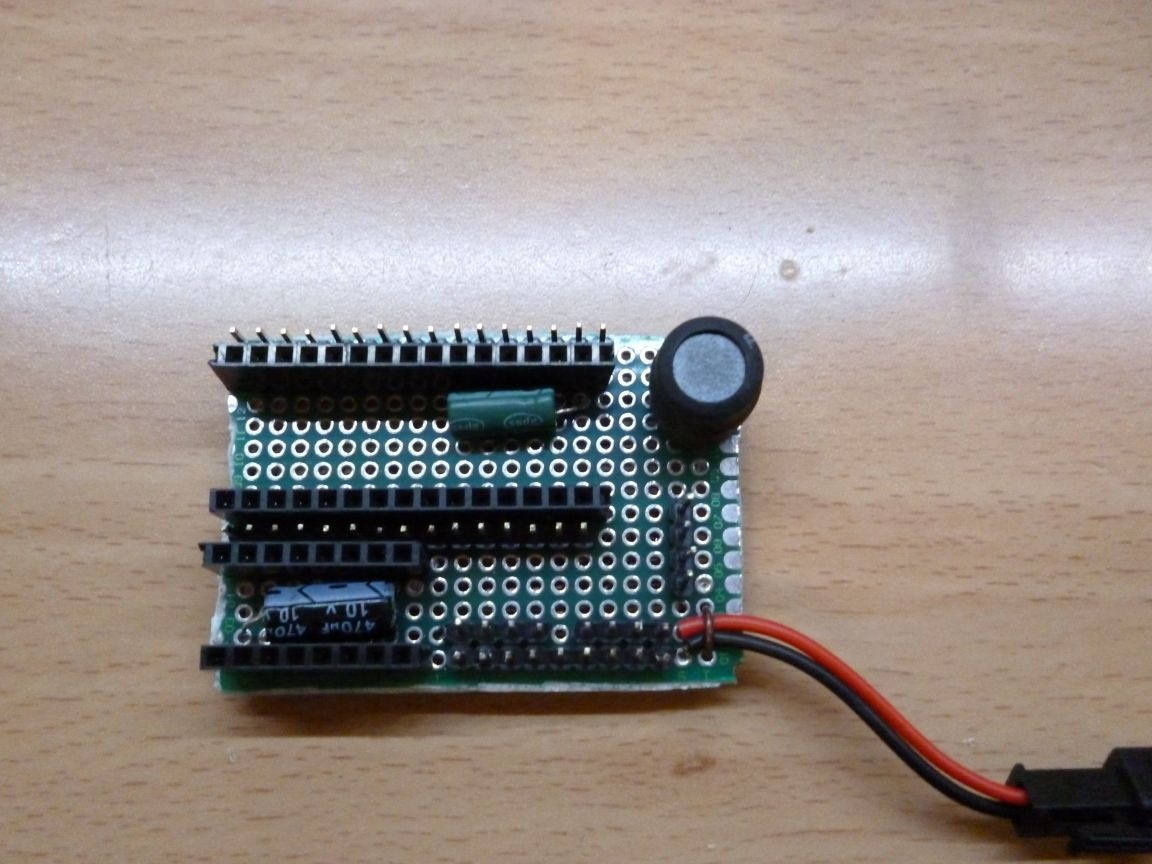
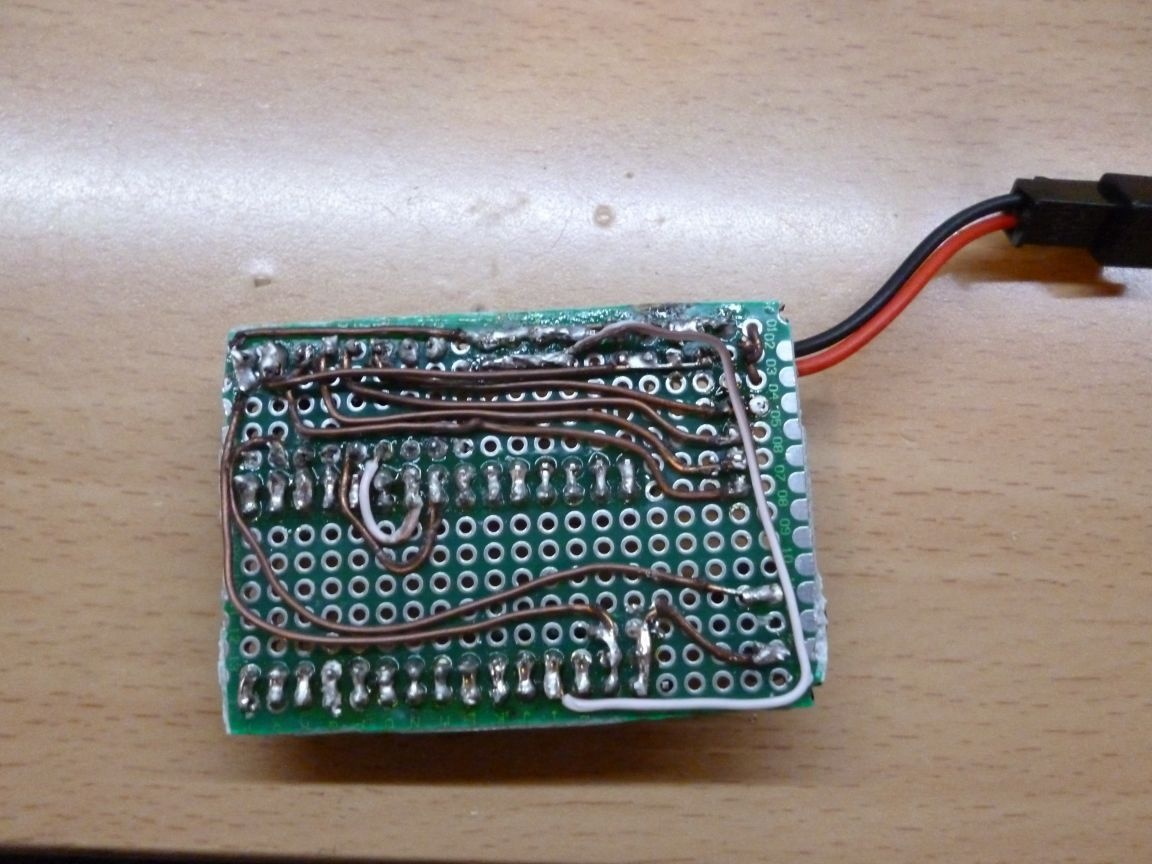
Hier muss man einen Lötkolben übernehmen. Der Einfachheit halber müssen Sie alles auf der Leiterplatte gemäß dem folgenden Diagramm löten:
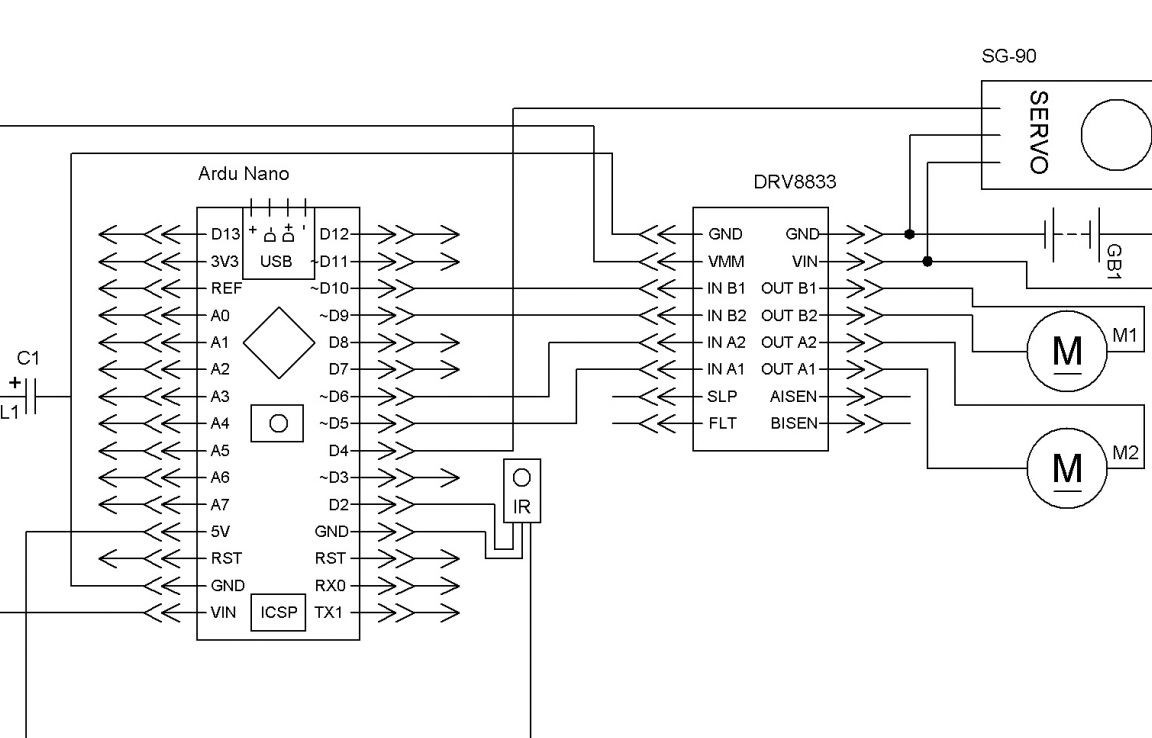
Ich denke, es lohnt sich, ein wenig zu erklären: Sie können jeden Kondensator mit geringer Leistung nehmen, Sie können auch einen Induktor jeglicher Art finden, dies ist notwendig, um die Spannung des Mikrocontrollers zu stabilisieren. Für die verwendeten LEDs müssen Widerstände ausgewählt werden. Ich habe einen IR-Empfänger von einem alten Spielzeug genommen, aber Sie können ihn in einem Radiogeschäft kaufen. Wenn starke Störungen auftreten, fügen Sie dem Stromkreis des IR-Empfängers einen Kondensator hinzu.
Ich habe folgendes:
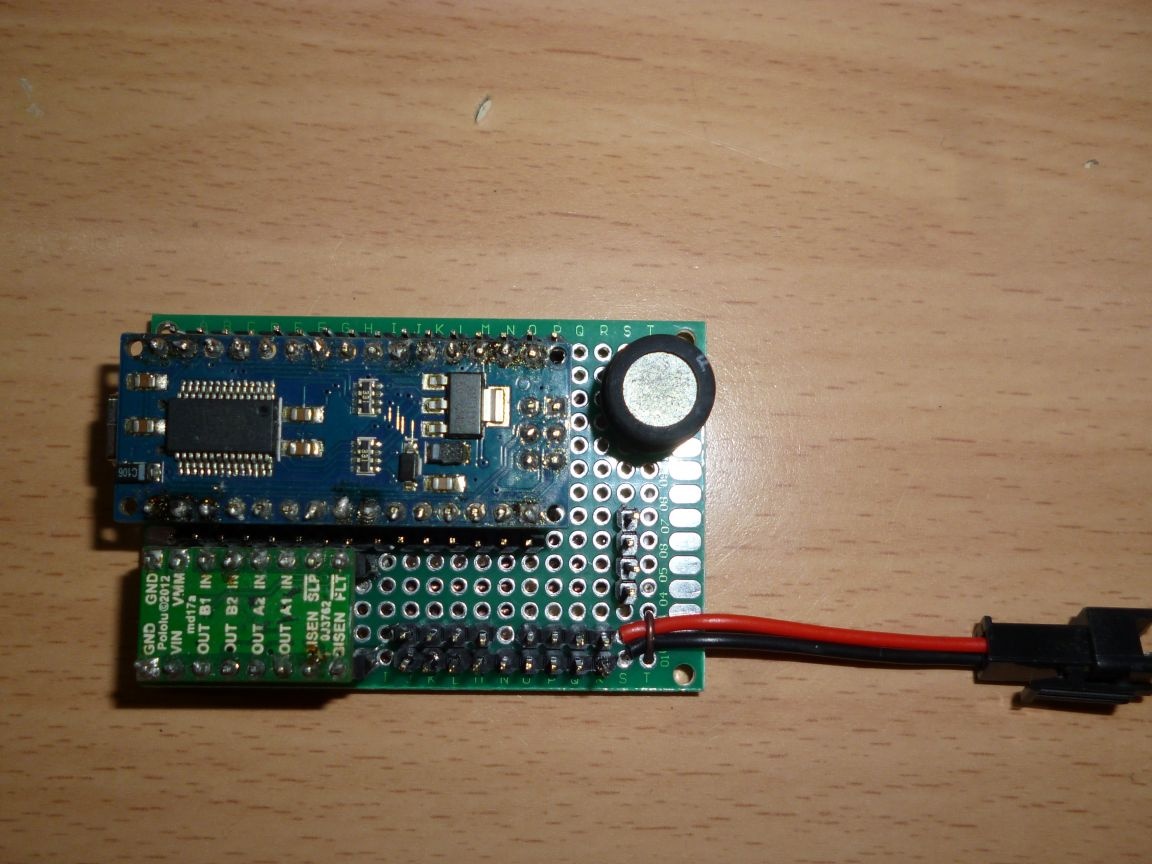
Wir installieren Arduino Nano und DRV 8833 an ihren Orten:
Und jetzt setzen wir das Board auf das Chassis (haben die Räder der Einfachheit halber entfernt):
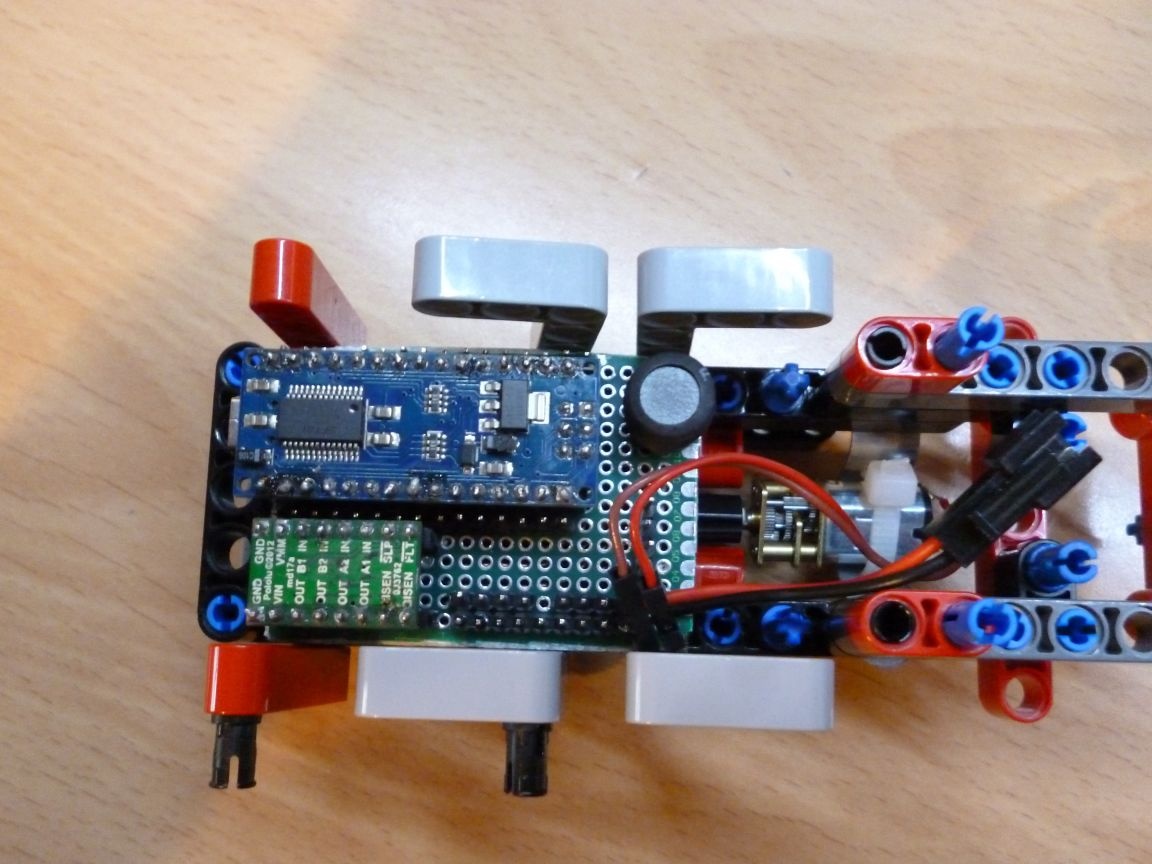
Für die Stromversorgung habe ich 4 Ni-Mn 1,2 V 1000 mA-Batterien verwendet, die in Reihe geschaltet und mit Klebeband umwickelt sind. Ich klebte sie auf doppelseitiges Klebeband unter dem hinteren Fahrerhausdeckel.
Schritt 6 Installation der Kabine.
Wir schließen den IR-Empfänger, die Motoren und die Dioden gemäß der Abbildung an, stellen die Kabine auf das Chassis und befestigen die Schaufel (jede Schaufel kann hergestellt werden):

Schritt 7 Firmware.
Ich programmiere in einer Arduino IDE. Zuerst müssen Sie meine Firmware ausfüllen und über das Terminal die Fernbedienungscodes überprüfen, die Sie verwenden werden. Sie können jede IR-Fernbedienung beispielsweise von einem Fernseher oder DVD-Player nehmen. Wenn Sie im Terminal auf eine Schaltfläche klicken, wird der Code der gedrückten Schaltfläche angezeigt. Schreiben Sie ihn auf ein Blatt Papier. Wir tun dies mit allen Tasten, auf denen wir die Aktionen des Laders programmieren möchten. Bearbeiten Sie als Nächstes die Skizze. Wir schreiben die Codes auf, die wir für die notwendigen Aktionen aufgezeichnet haben, und flashen sie erneut.
Firmware
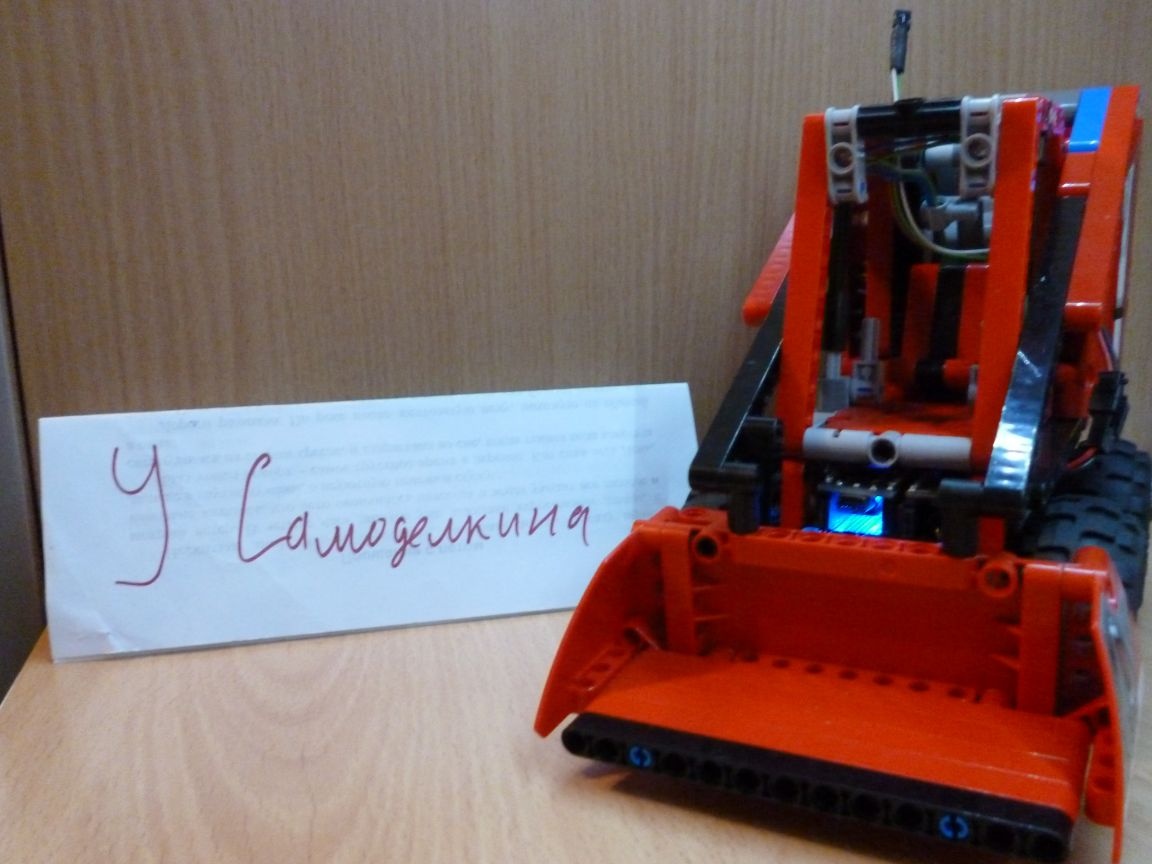
Loader Video: