


Guten Tag, heute möchte ich Anweisungen zur Herstellung eines Spielzeugpanzers geben, der vom Beschleunigungsmesser eines Android-Telefons gesteuert wird. Der Boden des Tanks besteht aus farbigem Sperrholz mit einer Dicke von 3 mm. Raupen und Doppelgetriebemotor der bekannten Firma Tamiya. Herstellung hochwertiger und kostengünstiger Teile.
Für den Tank brauchen wir:
- Tamiya 70168 Doppelgang
- Tamiya 70100 Satz Rollen und Schienen
- Tamiya 70157
- Sperrholz 10 mm (ein kleines Stück)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Bluetooth-Modul HC-06 oder gleichwertig
- USB-UART für Arduino-Firmware
- Rechteckige rote und grüne LEDs
- Weiße LEDs 5 mm 2St.
- Widerstände 3x 150 Ohm
- Li-Ionen 18650 Batterien
- Dupont Dad-Mom-Steckverbinder
- Drähte in verschiedenen Farben
- löten
- Kolophonium
- Lötkolben
- Schrauben 3x40, 3x20, Muttern und Unterlegscheiben für sie
- 2x10 Holzschrauben
- Holzbohrer 3 mm und 6 mm
- Elektrische Laubsäge
- Acrylfarbe
Schritt 1 Zusammenbau des Getriebemotors.
Ich benutze gerne Tamiya-Getriebemotoren. Sie stehen akzeptabel, lassen sich leicht zusammenbauen. Tamiya 70168 verfügt über vier Build-Optionen. Abhängig vom gewünschten Übersetzungsverhältnis und der Position der Abtriebswellen.
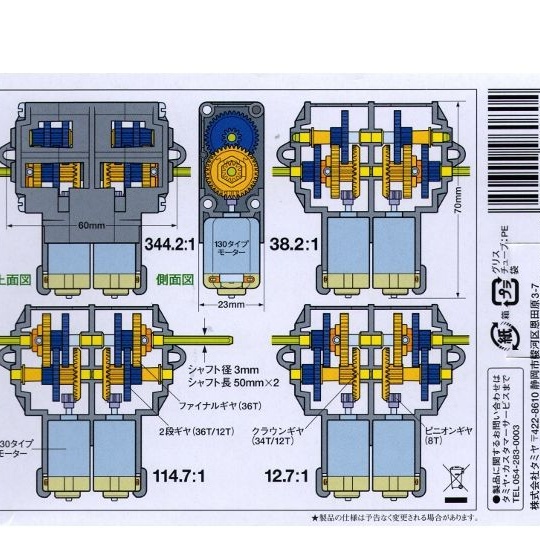
Detaillierte Anweisungen finden Sie im Getriebe. Wir brauchen, dass die Abtriebswellen näher an den Motoren sind und das Übersetzungsverhältnis 114,7: 1. Wir wählen die Option aus, die wir benötigen, und sammeln alles gemäß den Anweisungen, außer für die Installation von Motoren. Es ist bequemer, Motoren später zu platzieren. Außerdem müssen Drähte und Kondensatoren vor der Installation mit ihnen verlötet werden.
Schritt 2 Herstellung von Körperteilen.
Das Gehäuse besteht aus 3 mm dickem Sperrholz. Laden Sie das folgende Bild herunter und drucken Sie es auf einem A4-Blatt mit einer Skala von 102%.
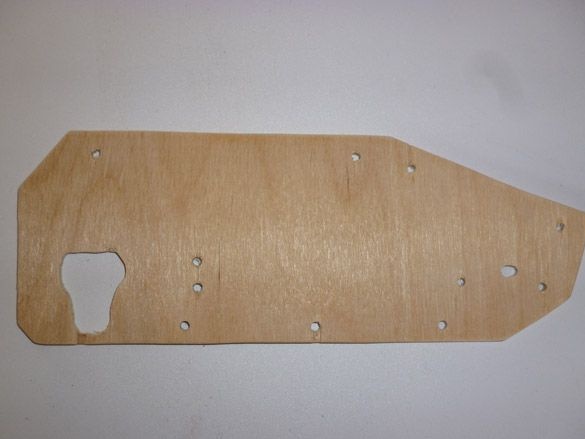
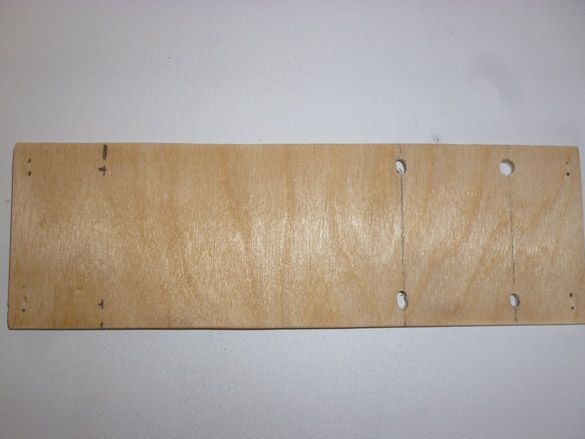
Jetzt nehmen wir zwei ausreichend große Sperrholzstücke, legen sie aufeinander und bringen unser Bild oben an. In den mit einem fetten Punkt gekennzeichneten Bereichen sollten 3-mm-Löcher gemacht werden. Damit beide Teile gleich sind, bohren wir zuerst eine Platte und zwei Sperrhölzer an einer der Stellen, setzen dort eine Schraube ein und drehen das Bild und zwei Sperrholzstücke zusammen. Dann das zweite Loch, und dort auch einen Bolzen einsetzen. Danach bohren wir den Rest. Achten Sie auf das Loch ganz links, es muss eine ovale Form haben. Dies ist notwendig, um die Spannung der Spuren zu steuern. Jetzt nehmen wir eine Stichsäge und schneiden sofort zwei Seitenteile des Gehäuses aus, wobei wir der fetten Linie des Bildes folgen. Zwei solche Details sollten sich herausstellen:
Als nächstes müssen Sie alle oben genannten Schritte ausführen. Nur dieses Mal haben wir zwei Details herausgeschnitten, die die Spuren abdecken. Es ist notwendig, das kleine Oval auf dem Bild zu schneiden. Als Ergebnis erhalten wir zwei weitere Details:
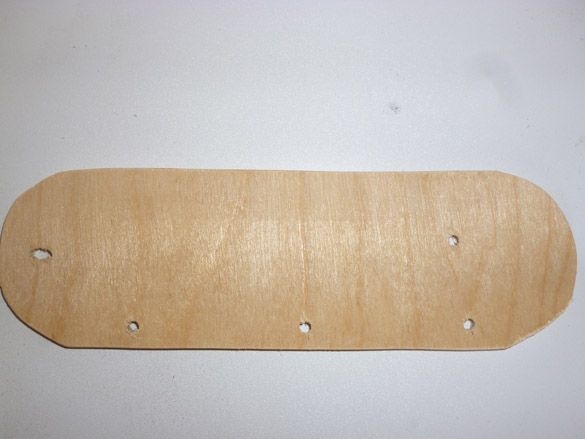
Jetzt nehmen wir eine Sperrholzplatte in einer Schicht und schneiden ein Rechteck mit den Abmessungen 168 x 54 mm. Dies ist der Boden unseres Tanks und der Teil, an dem der Getriebemotor befestigt ist:
Um die Montage zu starten, benötigen wir alle oben beschriebenen Details:

Sie können alle Details so lassen, wie sie sind, aber ich male sie lieber. Acrylfarbe eignet sich zum Malen. Es trocknet schnell und riecht nicht, was bedeutet, dass Sie in jedem Raum malen können, ohne Angst vor Vergiftungen zu haben. Also malen wir die ausgeschnittenen Details:

Jetzt brauchen wir 10 mm Sperrholz oder einen geeigneten Holzstab. Es ist notwendig, ein Rechteck von 54 x 15 mm und einer Dicke von 10 mm zu schneiden. Dieser Teil ist erforderlich, um das Gehäuse miteinander zu verbinden. Nachdem wir ein Rechteck erstellt haben, bohren wir zwei Löcher in einem Abstand von 15 mm von der Kante, zuerst mit einem 3-mm-Bohrer und dann mit 6 mm, jedoch nicht durch und durch, sondern nur mit der halben Tiefe. Setzen Sie die Muttern in die erhaltenen Löcher ein und befestigen Sie sie mit Klebstoff. Wir brauchen vier solche Details:

Wieder nehmen wir 3 mm dickes Sperrholz. Schneiden Sie ein Rechteck 107 x 60 mm. Wenn Sie sich 15 mm von den Rändern des Bohrlochs 3 mm zurückziehen, ist dies die obere Abdeckung:

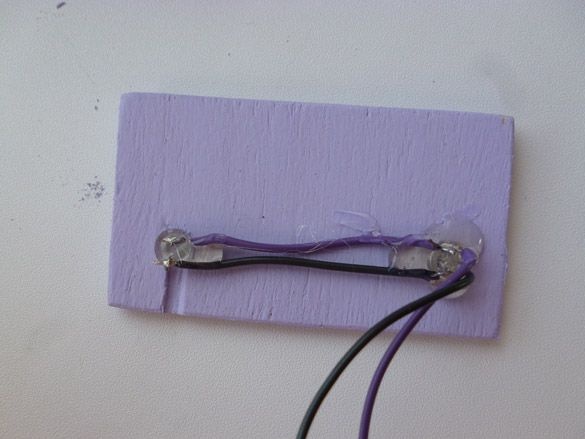
Wir schneiden das nächste Rechteck von 33 x 60 mm. 15 mm von den Kanten entfernt bohren wir zwei Löcher mit einem Durchmesser von 5 mm. Schneiden und Abisolieren eines Teils malen wir es. Dann setzen wir weiße 5-Millimeter-LEDs in die Löcher ein. Wir löten sie parallel und fixieren sie mit Schmelzkleber:
Schritt 3 Montage des Gehäuses.
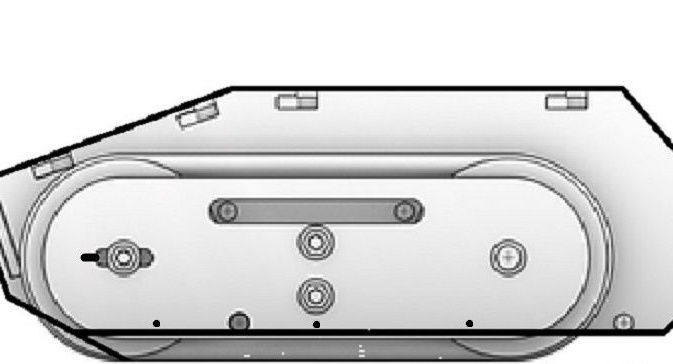
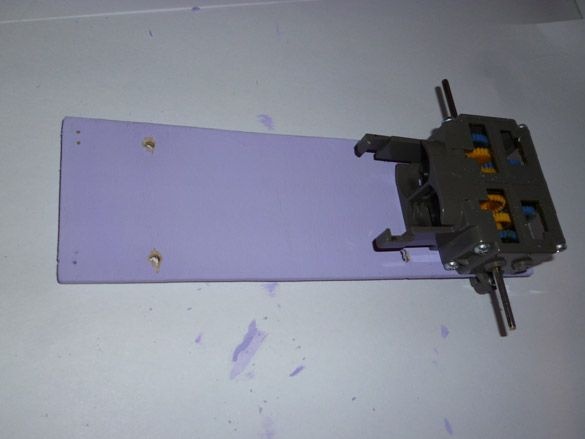
Nachdem wir den Getriebemotor und die Teile vorbereitet haben, fahren wir mit der Montage von allem zusammen fort. Nehmen Sie zunächst den unteren Teil des Gehäuses und befestigen Sie den Getriebemotor daran:
Und etwas größer:

Dann befestigen wir die Seitenteile mit Ecken eines Kindereisenbauers und 3x20 mm Schrauben dafür:

Jetzt müssen wir die Tracks installieren. Wir nehmen die Details der Schlussspuren. Wir setzen 3x40 mm Schrauben in die Löcher ein. Wir setzen ein großes Rad auf die vordere Schraube, auf die unteren drei kleinen, dann die Unterlegscheiben und ziehen die Muttern fest, aber nicht fest, so dass sich alle Rollen frei drehen. Wir haben große Kettenräder auf die Wellen des Getriebemotors gesetzt. Wir kombinieren alle Schrauben mit Rollen mit Löchern an den Seitenteilen. Nachdem wir die Schrauben passiert haben, wickeln wir die Muttern von der Innenseite des Gehäuses auf und ziehen sie fest. Wir legen die Schienen an und prüfen, ob sie fest genug sind. Raupen sollten nicht durchhängen, aber zu viel Spannung kann sie beschädigen. Die Einstellung erfolgt durch das Vorderrad, das es bewegt oder umgekehrt und vom Getriebemotor wegbewegt. Nach all den Manipulationen bekommen wir:

Wir nehmen die Motoren, die mit den Rollen und Ketten geliefert werden. Wir löten an die Kontaktflächen des Drahtes und parallel dazu einen 0,1-Mikrofarad-Kondensator. Danach die Motoren in den Getriebemotor einbauen:

Gehen wir weiter zu den Batterien. Wir löten unsere Li-Ion 18650-Batterien parallel und geben die Drähte zur Vereinfachung aus. Drehen Sie sie mit Klebeband:

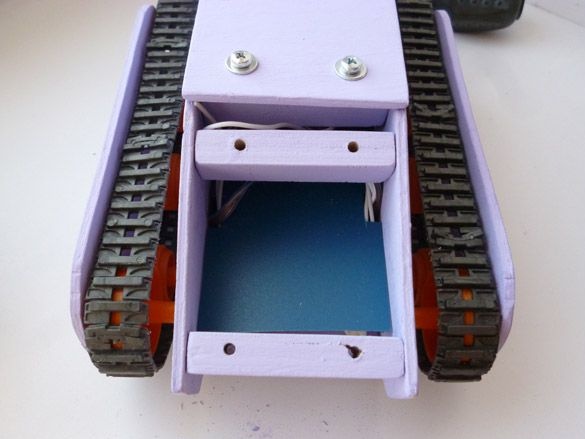
Wir platzieren sie am Boden des Gehäuses neben den Motoren:

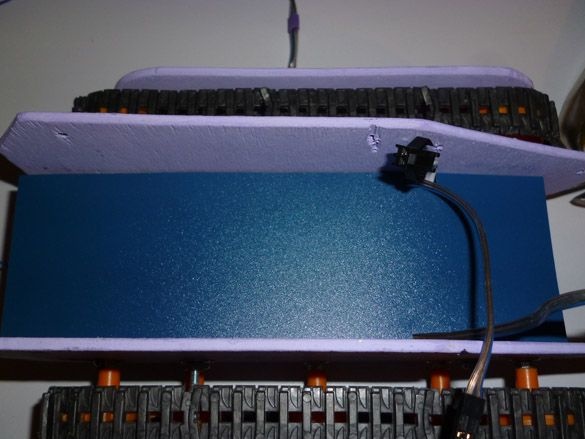
Zur Vereinfachung sowie zur Trennung von mechanischen und e Teile, schneiden Sie ein Rechteck von 100 x 54 mm aus dünnem Kunststoff oder Pappe. Legen Sie es auf den Getriebemotor und die Batterien:
Wir nehmen Befestigungselemente und installieren sie wie auf dem Foto gezeigt. Wir befestigen die Seitenteile mit Schrauben:
Auf der Rückseite des Tanks befestigen wir rechteckige LEDs am Heißkleber. Rot und Grün:

Ich benutze auch Heißkleber, um das Vorderteil mit den Scheinwerfern zu befestigen:

Schritt 4 Elektrik
Elektromotoren stören ihren Betrieb und während des Startvorgangs tritt ein Spannungsabfall auf. Damit der Arduino bei jedem Start der Motoren nicht überlastet, teilen wir die Stromversorgung auf. Arduino wird von einer 9-Volt-Batterie vom Kronentyp und Motoren aus Batterien angetrieben. Wir haben die Batterien bereits platziert, wir werden die Krone vor den Tank stellen:

Schließen Sie den Akku nach dem Einsetzen mit der oberen Abdeckung:

Wir verbinden alles nach dem Schema miteinander:

Ich werde ein wenig erklären. Der linke Motor über den Treiber ist mit dem 5 und 6 Pin verbunden. Rechts - auf 9 und 10. Plus von der roten LED über den Widerstand auf 3-polig, minus auf GND. Plus von der grünen LED, auch durch den Widerstand, auf 4 Pin. Scheinwerfer auf 2 Pin.
Die Bedienung des Bluetooth-Moduls erfolgt über die SoftwareSerial-Bibliothek.Wir werden den Software-Com-Port verwenden. Verbindungskontakte können in der Skizze geändert werden. Wir verbinden das Modul wie folgt:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5 V - VCC
GND –GND
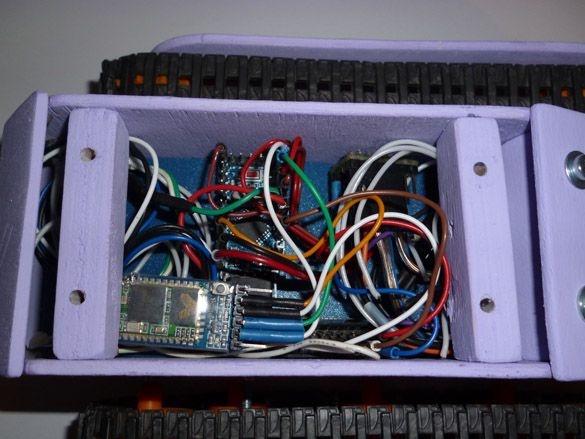
Alles zusammen setzen wir einen Elektriker in den zentralen Teil:
Schritt 5 Software.
Um mit der Skizze arbeiten zu können, müssen Sie die Arduino IDE herunterladen. Wir fahren fort und laden die neueste Version herunter:
Dann müssen Sie die Bibliothek hinzufügen. SoftwareSerial sollte sich bereits in der Arduino IDE befinden. Aber nur für den Fall, ich werde es posten:
Wenn die Arduino IDE beim Kompilieren der Skizze einen Fehler ausgibt und auf die fehlende Bibliothek schwört, entpacken Sie das heruntergeladene Archiv in den Ordner "Bibliotheken", der sich in dem Ordner befindet, in dem die Arduino IDE installiert ist.
Schritt 6 Bereiten Sie das Bluetooth-Modul vor.
Die Standardeinstellungen des Bluetooth-Moduls unterscheiden sich von den von uns benötigten. Daher müssen Sie zuerst die Verbindung des Bluetooth-Moduls mit dem Computer herstellen und die Einstellungen ändern. Füllen Sie die Send_ AT_Bluetooth-Skizze in das Arduino:
Arduino fungiert als Verbindung zwischen Bluetooth und dem Computer. Starten Sie die Arduino IDE und öffnen Sie den Port Monitor. Wählen Sie für HC-06 9600 in den Einstellungen des Portmonitors aus. NL und CR werden nicht benötigt. Wenn mit dem Modul keine Bluetooth-Verbindung hergestellt wurde, befindet es sich im AT-Befehlseingabemodus. Möglicherweise reagiert das Modul beim ersten Mal nicht. Versuchen Sie dann, es zu überlasten, indem Sie das Pluskabel trennen und wieder anschließen. Alle Befehle werden ohne Anführungszeichen eingegeben. Vergessen Sie nicht, zum Senden die Eingabetaste zu drücken. Wir geben folgende Befehle ein:
"AT" - ohne Anführungszeichen sollte die Antwort "OK" kommen.
"AT + NAME
"AT + BAUD7" - Stellen Sie die Geschwindigkeit auf 57600 ein.
"AT + RESET" - wir überlasten das Modul.
Wenn etwas schief gelaufen ist oder Sie sich nicht an die Einstellungen erinnern:
“AT + ORGL” - Stellen Sie das Modul auf die Werkseinstellungen zurück.
Schritt 7 Füllen Sie die Skizze aus.
Füllen Sie nach dem Einrichten des Bluetooth-Moduls die Hauptskizze aus:
Schritt 8 Bereiten Sie Ihr Android-Telefon vor.
Stellen Sie vor dem Gebrauch sicher, dass Ihr Android-Telefon oder -Tablet über einen Beschleunigungsmesser verfügt. Fügen Sie zunächst ein Bluetooth-Gerät tanchka in Android hinzu. Wir gehen in die Bluetooth-Einstellungen, suchen das von Ihnen benannte Bluetooth-Modul und stellen eine Verbindung her. Das Passwort für die Verbindung lautet "1234" oder "0000". Es kann für verschiedene Modelle unterschiedlich sein. Installieren Sie nun das Steuerungsprogramm. Wir benötigen ein Arduino Bluetooth RC Car oder einen BT Controller. Beide Programme sind kostenlos, sie können das Bkuetooth-Gerät über den Beschleunigungsmesser steuern und sie befinden sich in Google Play. Laden Sie das gewünschte Programm auf Ihr Telefon oder Tablet herunter. Geben Sie im Menü Programmeinstellungen die folgenden Befehle ein:
W - vorwärts
S - zurück
A - links
D - richtig
F oder G - Stopp
K - Scheinwerfer
L - Scheinwerfer aus
Sie können den Tank auch mit dem Joystick steuern. Es kann nach meinem anderen gemacht werden Anweisungen.
Fügen Sie ein Bluetooth-Modul hinzu, das einem anderen folgt Anweisungen.

