

Ich modelliere und baue weiterhin Roboter. Ich habe bereits Anweisungen zum Erstellen einer Fernbedienung geschrieben Modelle und Roboter. Die Fernbedienung basiert auf dem alten Sega-Joystick. Dieser Joystick verfügt über vier Pfeile und 8 Tasten, mit denen eine Maschine oder ein kleiner Roboter gesteuert werden kann. Die Verwaltung erfolgte mittels einer IR-LED. Heute werde ich Anweisungen für die Modernisierung dieser Fernbedienung schreiben, nämlich die Umwandlung in eine Bluetooth-Fernbedienung. Abhängig vom verwendeten Bluetooth-Modul stellt die Fernbedienung entweder eine Verbindung zum vorprogrammierten Gerät selbst her oder es kann eine Verbindung zur Fernbedienung hergestellt werden. Ich werde beide Optionen beschreiben. Wir werden brauchen:
- Joystick von Sega
- Arduino Pro Mini 3,3 V 8 MHz
- USB-TTL
- 2 Ni-Mn-Batterien 1,2 V 1000 mA
- Bluetooth-Modul HC-05 oder HC-06
- Rote LED
- Blaue LED
- Widerstand 2x75Om, 2x5Om, 1x2Om
- Anschluss PLSx5 "Mutter"
- Heißkleber
- Drähte
- 4xAAA Batteriefach
- Mehrfarbige Drähte
- Lötkolben, Lötmittel, Kolophonium
- gerade Arme
Schritt 1 Auswählen eines Bluetooth-Moduls
Für die Kommunikation sind zwei Module erforderlich. Wir werden eine in die Fernbedienung einführen und die zweite mit der Schreibmaschine oder verbinden der Roboter. Es gibt eine große Anzahl von Bluetooth-Modulen. Sie unterscheiden sich in Funktionen und unterstützten Kommunikationsprotokollen. Eine Beispielliste der gefundenen Module:
- HC-03, HC-04 (HC-04-M, HC-04-S) auf dem BC417143-Chip;
- HC-05, HC-06 (HC-06-M, HC-06-S) auf dem BC417143-Chip;
- HC-05-D, HC-06-D;
- HC-07 - Modul mit einem CSR 41C6 Chip;
- HC-08 - Modul mit extrem geringem Stromverbrauch und Bluetooth 4.0-Protokoll;
- HC-09 ist das neueste Modul, das HC-06 und HC-07 ersetzt.
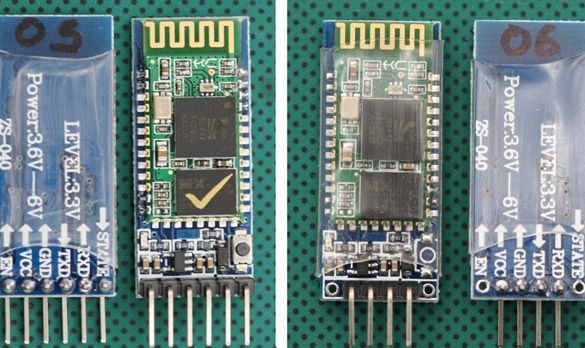
Ich habe mich für zwei Module HC-05 und HC-06 entschieden, da diese hinsichtlich Preis / Funktionalität optimal sind. Sie unterstützen das Kommunikationsprotokoll - Bluetooth Specification v2.0 + EDR. Die Reichweite beträgt bis zu 10 Meter (Leistungsstufe 2). Kompatibel mit allen Bluetooth-Adaptern, die SPP unterstützen. Das Volumen des Flash-Speichers (zum Speichern von Firmware und Einstellungen) beträgt 8 Mbit. Sie arbeiten mit einer Frequenz eines Funksignals - 2,40 .. 2,48 GHz. Die Host-Schnittstelle ist USB 1.1 / 2.0 oder UART. Sie haben einen geringen Stromverbrauch - der Strom während der Kommunikation beträgt 30-40 mA. Der durchschnittliche Stromwert beträgt ca. 25 mA. Nach dem Herstellen der Verbindung beträgt der verbrauchte Strom 8 mA. Diese Module sind leicht zu finden, sie sind am häufigsten. Die Module sind sehr ähnlich, aber der Hauptunterschied zwischen ihnen besteht darin, dass der HC-05 sowohl im Master-Modus als auch im Slave-Modus arbeiten kann.HC-06 kann nur ein Sklave sein. Einfach ausgedrückt, der HC-06 kann ein gekoppeltes Gerät nicht erkennen und keine Verbindung herstellen, sondern nur dem Master gehorchen. Die Module werden als zwei miteinander verlötete Platinen verkauft. Das kleinere ist das Werksmodul. Groß - ein spezielles Steckbrett für Heimwerker. Es sieht aus wie ein kleineres Board mit einem BC417-Chip:

Und so die DIY-Module HC-05 und HC-06 selbst:
Sie können ein Modul ohne Steckbrett kaufen. Es kostet etwas billiger, aber dann müssen Sie einen 3,3-V-Spannungsregler für das Modul installieren. Außerdem ist der Abstand zwischen den Kontakten gering und Sie müssen sich selbst quälen, indem Sie an das Drahtmodul anlöten.
Um die Kommunikation zwischen der Fernbedienung und dem Roboter oder der Maschine herzustellen, müssen Sie zwei Bluetooth-Module übereinander konfigurieren. In diesem Fall konfigurieren wir das HC-05-Modul so, dass es den HC-06 findet und mit ihm verbindet.
Schritt 2 Konfigurieren Sie den HC-06.
Zuerst müssen Sie den HC-06 an den Computer anschließen. Dies kann durch Anschließen des Moduls über einen USB-UART-Adapter erfolgen. In diesem Fall ist die Verbindung wie folgt:
Bluetooth - USB-UART
TX - RX
RX - TX
VCC - +5
GND - GND
Wenn Sie kein USB-UART zur Hand haben, können Sie die folgende Skizze auf jedes Arduino-Board schreiben:
Verbinden Sie sich wie folgt:
Bluetooth - Arduino
TX - Pin 2
RX - Pin 3
VCC - +5
GND - GND
Dann öffnen wir ein beliebiges Terminalprogramm, wählen den Com-Port aus, an den der HC-06 angeschlossen ist, die Standardgeschwindigkeit ist 9600, NL und CR werden nicht benötigt. Wenn mit dem HC-06 keine Bluetooth-Verbindung hergestellt wird, befindet sich das Modul im Modus zur Eingabe von AT-Befehlen. Wenn das Modul nicht reagiert, versuchen Sie, es zu überlasten, indem Sie das Pluskabel abziehen und wieder anschließen. Und geben Sie die folgenden Befehle ein:
"AT" - ohne Anführungszeichen sollte die Antwort "OK" kommen.
"AT + ADDR" - mit diesem Befehl ermitteln wir die eindeutige Adresse von HC-06 und notieren diese Adresse
"AT + BAUD7" - Stellen Sie die Geschwindigkeit auf 57600 ein
"AT + RESET" - wir überlasten das Modul
Die folgenden Befehle müssen nicht eingegeben werden, aber nur für den Fall, dass es besser ist, sie zu kennen:
"AT + NAME
“AT + ORGL” - Zurücksetzen des Moduls auf die Werkseinstellungen
Damit ist die Einrichtung des HC-06 abgeschlossen.
Schritt 3 Konfigurieren Sie HC-05.
Wir schließen das Modul ähnlich wie HC-06 an. Öffnen Sie als Nächstes ein beliebiges Terminalprogramm, wählen Sie den COM-Anschluss aus, an dem USB-UART oder Arduino hängt. Die werkseitige Standardkommunikationsgeschwindigkeit ist 9600, aber ich habe mich auch mit einer Geschwindigkeit von 38400 getroffen. Wenn Sie diese nicht geändert haben, wählen Sie 9600, Sie können keine Verbindung herstellen, wechseln Sie zu 38400. Es lohnt sich, die Parameter NL und CR anzugeben. Um den AT-Befehlseingabemodus zu übertragen, müssen Sie die Taste auf der HC-05-Karte drücken und dann Folgendes eingeben:
"AT" - ohne Anführungszeichen eingegeben, sollte die Antwort "OK" kommen. Wenn Sie kommen, geben wir weiterhin Befehle ein.
"AT + ROLE = 1" - mit diesem Befehl setzen wir die Rolle des Moduls mit der Ziffer:
0 - Slave, 1 - Master, 2 - Slave im Zyklus *. Sie sollten die Antwort "+ ROLLE: 1 \ r \ n" oder "OK" erhalten.
"AT + CMODE = 0" - Das Modul in der Rolle des Masters ist nur mit dem Bluetooth-Gerät verbunden, dessen Adresse durch den Befehl "AT + BIND" angezeigt wird.
"AT + BIND: 1234,56,123456" - Um eine Verbindung mit Ihrem HC-06 herzustellen, müssen Sie hier dessen Adresse eingeben. Nach Eingabe aller Befehle befindet sich das Modul in der Rolle des Masters (ROLE = 1) und der Verbindungsmodus zur festen Adresse (CMODE = 0) ist eingestellt. Es wird nur eine Verbindung zu dem Bluetooth-Gerät hergestellt, dessen Adresse durch diesen Befehl angegeben wird. Teile der Adresse werden eingegeben: während der Installation - durch Komma getrennt und bei Beantwortung - durch einen Doppelpunkt. Sie erhalten die Antwort: "+ BIND: 1234: 56: 789ABC \ r \ n" oder "OK"
"AT + UART = 57600,0,0" - Stellen Sie die Geschwindigkeit auf 57.600 Bit / s ein. Das Stoppbit wird durch die Zahl: 0 - Eins dargestellt. Die Prüfung wird durch die Zahl: 0 - ohne Überprüfung dargestellt
Wenn Sie sich über die Moduleinstellungen nicht sicher sind oder diese nicht mehr richtig funktionieren, versuchen Sie den folgenden Befehl:
"AT + ORGL" - Das Modul setzt die folgenden Einstellungen zurück: CLASS = 0, IAC = 9e8b33, ROLE = 0, CMODE = 0, UART = 38400,0,0, PSWD = 1234, NAME = hc01.com.
Konfigurieren Sie anschließend die erforderlichen Einstellungen neu.
Auf diese Weise haben wir eine starke Verbindung zwischen HC-05 und HC-06 hergestellt. Wenn die HC-05-Module eingeschaltet sind, wird eine Verbindung mit dem HC-06 hergestellt. Aus persönlicher Erfahrung kann ich sagen, dass es besser ist, zuerst den HC-05 und dann den HC-06 einzuschalten. Wenn die Verbindung unterbrochen wird, müssen Sie beide Module überlasten.
Schritt 4 Vorbereiten der Fernbedienung.
Dieser Schritt wird in den vorherigen Anweisungen unter:
https://dem.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
Die Schritte 1 bis 4 müssen ausgeführt werden. Das Löten der IR-Diode ist optional, stört jedoch nicht.
Schritt 5 Anschließen eines Bluetooth-Moduls.
Ich empfehle Ihnen, HC-06 in der Fernbedienung zu installieren. Da Sie zum Ändern der Einstellungen des Moduls nur die entsprechende Skizze im Arduino Pro Mini ausfüllen müssen. Beim HC-05 müssen Sie die Fernbedienung zerlegen, um die Taste zum Umschalten in den AT-Befehlsmodus zu drücken.Wir verbinden alles nach folgendem Schema
Joystick - Arduino
Pfeil nach oben - Stift 2
Abwärtspfeil - Stift 4
Pfeil nach links - Stift 5
Pfeil nach rechts - Stift 6
Taste A - Pin 8
Taste B - Pin 10
C-Taste - Pin 7
X-Taste - Pin 12
Y-Taste - Pin 11
Z-Taste - Pin 9
Startknopf - Pin 14 (A0)
Reset-Taste - RST
Allgemein - GND
Bluetooth - Arduino
TX - Pin 16 (A2)
RX - Pin 17 (A3)
VCC - + 5
GND - GND
HC-05 Wir verbinden uns mit Ihrer Schreibmaschine oder Ihrem Roboter, den Sie steuern möchten. Verbindungsoptionen und Skizzen finden Sie in meinen anderen Anweisungen. Wenn Sie eine Roboterskizze schreiben, müssen Sie die Verbindungsgeschwindigkeit auf 57600 einstellen und die SoftwareSerial-Bibliothek in der Skizze verwenden.
Schritt 6 Vorbereiten der Umgebung und der Firmware.
Der beste Weg, eine Skizze zu schreiben und zu bearbeiten, ist die Verwendung der Arduino IDE. Die Arduino IDE-Version darf nicht niedriger als 1,8 sein. Laden Sie die Arduino IDE von der offiziellen Website herunter:
https://www.arduino.cc/en/Main/Software
Dann müssen Sie die Bibliothek zur Arduino IDE hinzufügen. Die Skizze verwendet eine SoftwareSerial.h-Bibliothek (für die Kommunikation mit dem Bluetooth-Modul):
Sie müssen es herunterladen und installieren. Sie können die Bibliothek installieren, indem Sie das Archiv entpacken und die entpackten Dateien in den Ordner "Bibliotheken" verschieben, der sich in dem Ordner befindet, in dem die Arduino IDE installiert ist. Sie können auch das integrierte Tool zum Hinzufügen von Bibliotheken verwenden. Wählen Sie in der Arduino IDE das Menü Skizze - Bibliothek verbinden aus, ohne das heruntergeladene Archiv zu entpacken. Wählen Sie oben in der Dropdown-Liste das Element ".Zip-Bibliothek hinzufügen" aus. Und geben Sie den Speicherort des heruntergeladenen Archivs an. Nach der Installation der Bibliothek müssen Sie die Arduino IDE neu starten.
Unsere Fernbedienung blinkt auf die gleiche Weise wie die vorherige Version der Fernbedienung, die über USB-TTL über einen Anschluss angeschlossen ist. Der Ladevorgang erfolgt ebenfalls über diese Fernbedienung. Klicken Sie beim Ausfüllen der Skizze auf Zurücksetzen.
