Während seiner Ausbildung spielte der Autor Spiele mit Beschleunigungsmesser-Unterstützung auf seinem Handy. Er fuhr sehr gerne ein Auto am Telefon, indem er einfach kippte, und dann begann er davon zu träumen, ein Auto mit der gleichen Kontrolle im wirklichen Leben zu bauen. Jetzt mit Arduino Nachdem er Programmierkenntnisse erworben hat, ist es Zeit, eine verwaltete Maschine auf Android zu erstellen, die er Hercules nannte.
Sie bekam diesen Namen wegen des enormen Drehmoments und der hohen Geschwindigkeit. Modell kann mit einem Android-Handy über Bluetooth gesteuert werden. Jedes Telefon mit diesem Betriebssystem ist zur Steuerung geeignet, der Autor beschränkt nicht eine Fernbedienung. Durch die Verwendung des Telefons wurde außerdem Geld gespart, da ich kein Geld für die Erstellung einer Fernbedienung ausgeben musste.
Materialien und Werkzeuge:
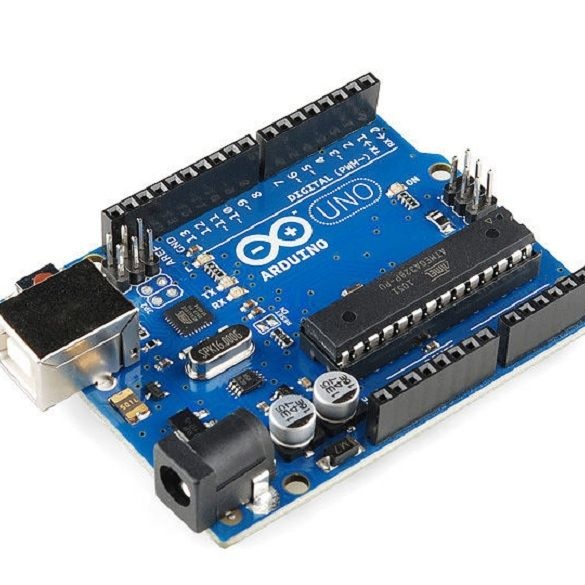
- Arduino Uno
- Bluetooth-Transceiver
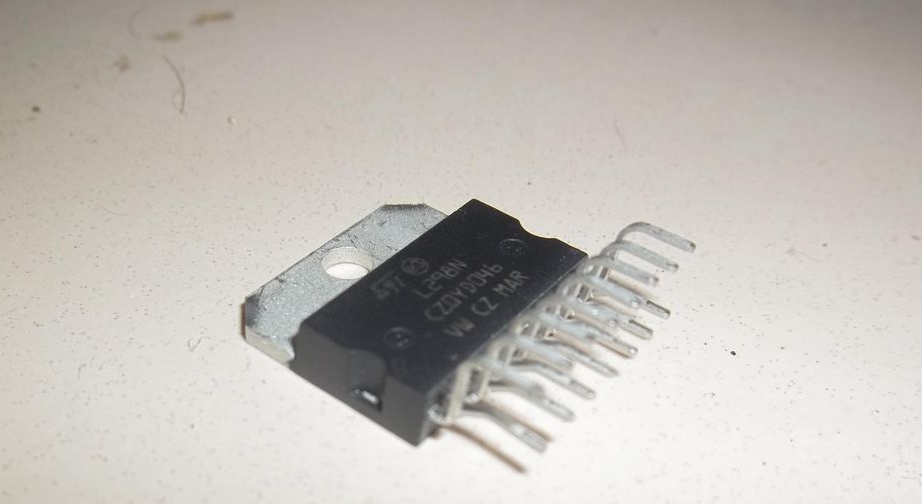
- Zweimotortreiber (mit L298 H-Brücke)
- Motoren mit Zahnrädern 4-teilig (Leistung wird je nach Anwendung der Maschine gewählt)
- Räder 4 Stk
- Batterie 1Ah SLA 12V
- Basis für Komponenten (Chassis)
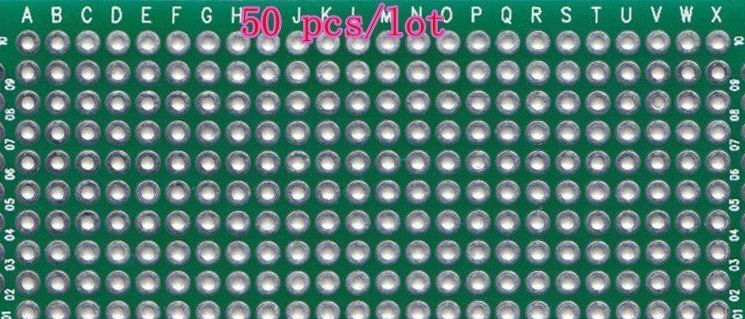
- Steckbrett
- Boxen für 4 Stück
- SPST-Schalter
- Verbindungsdrähte für Arduino
- Lötdrähte
- Muttern und Schrauben von geringer Größe
- Widerstand 10 kOhm 1 Stck
- Widerstand 20 kOhm 1 Stck
- Android-Handy
- Lötkolben
- löten
- Lötpaste
- bohren





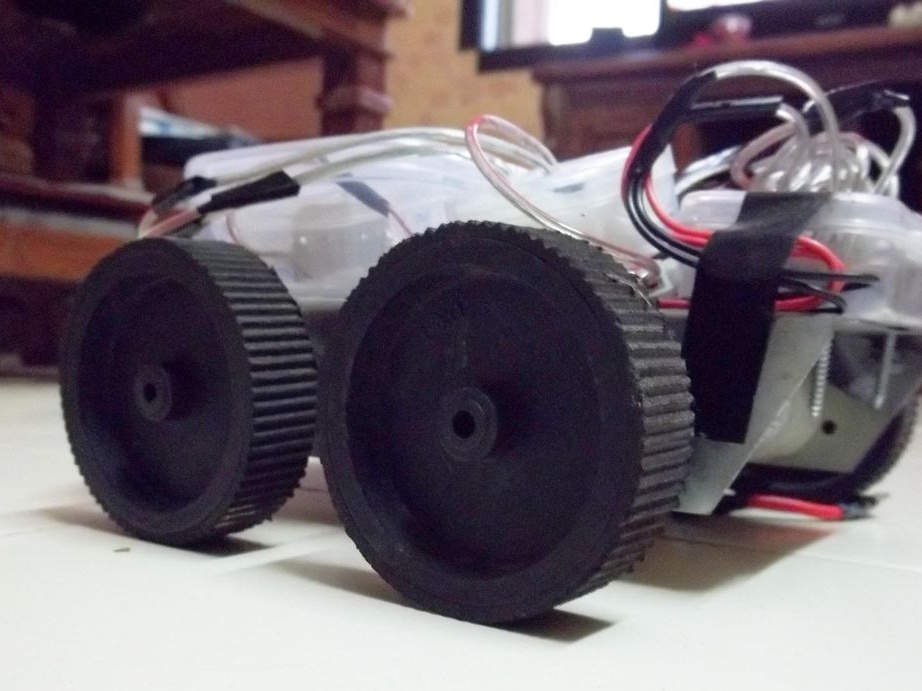
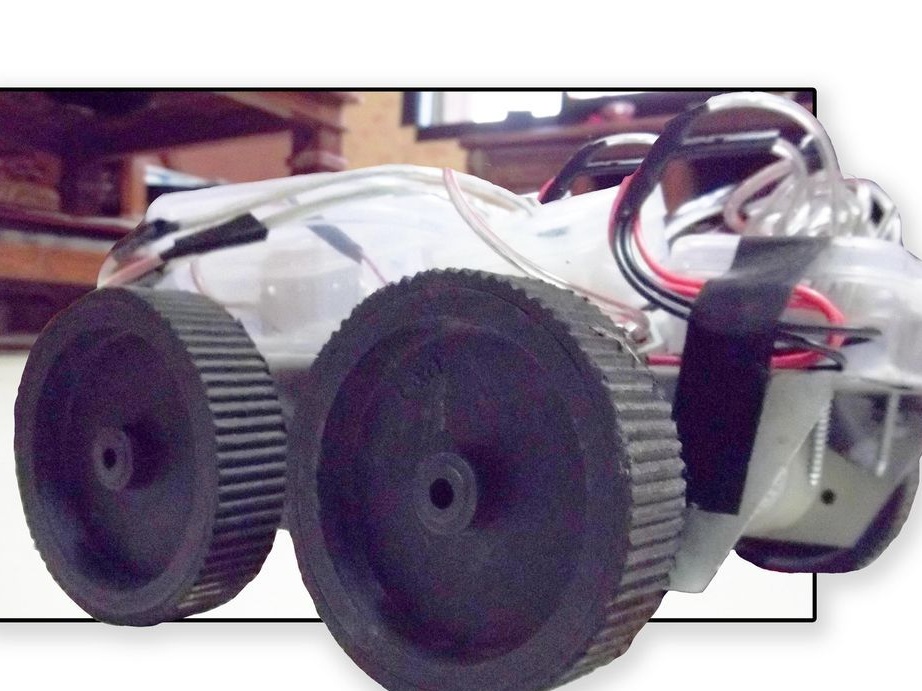
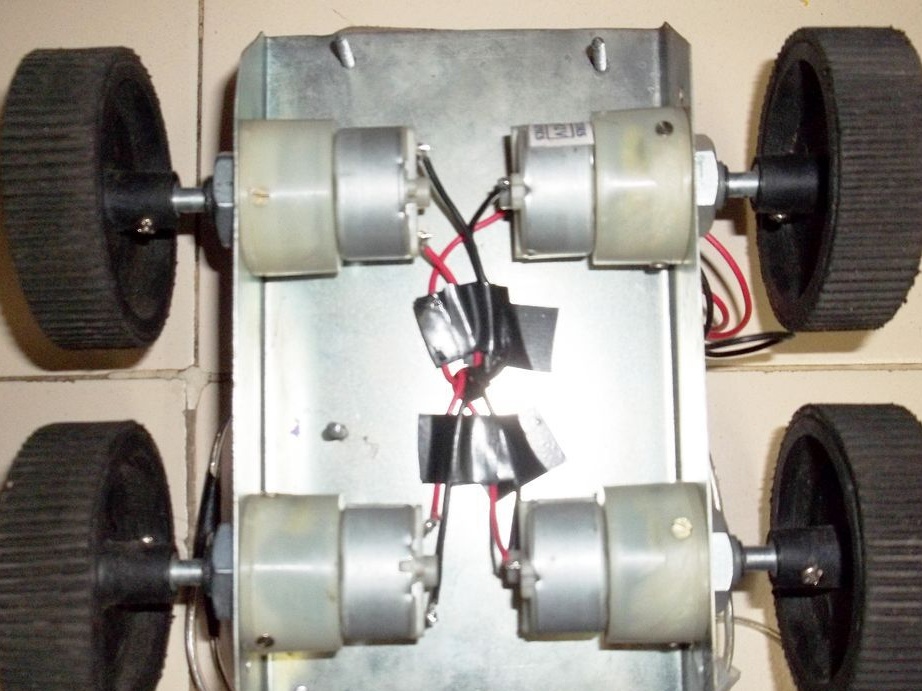
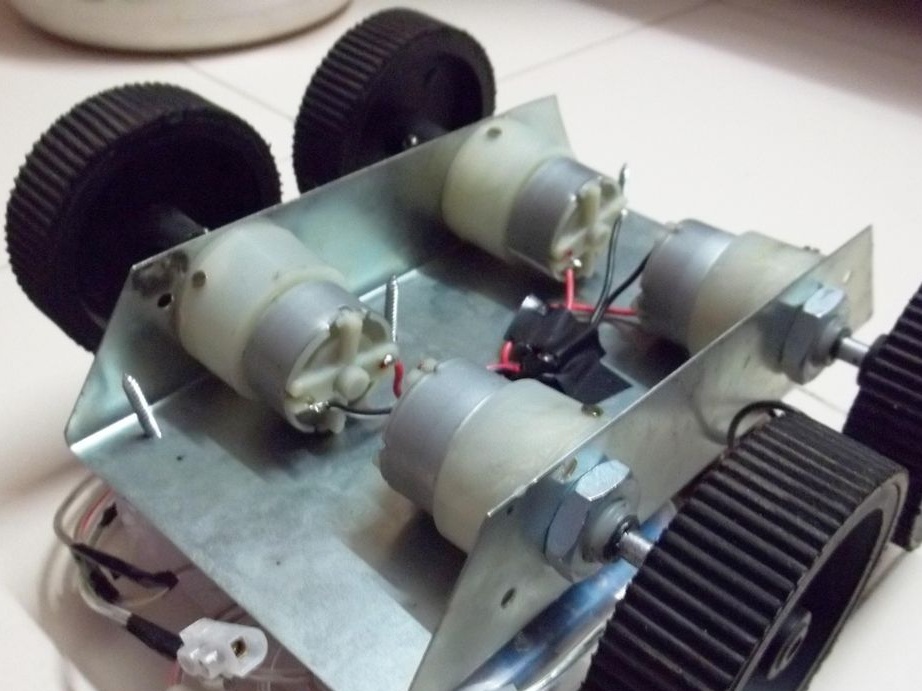
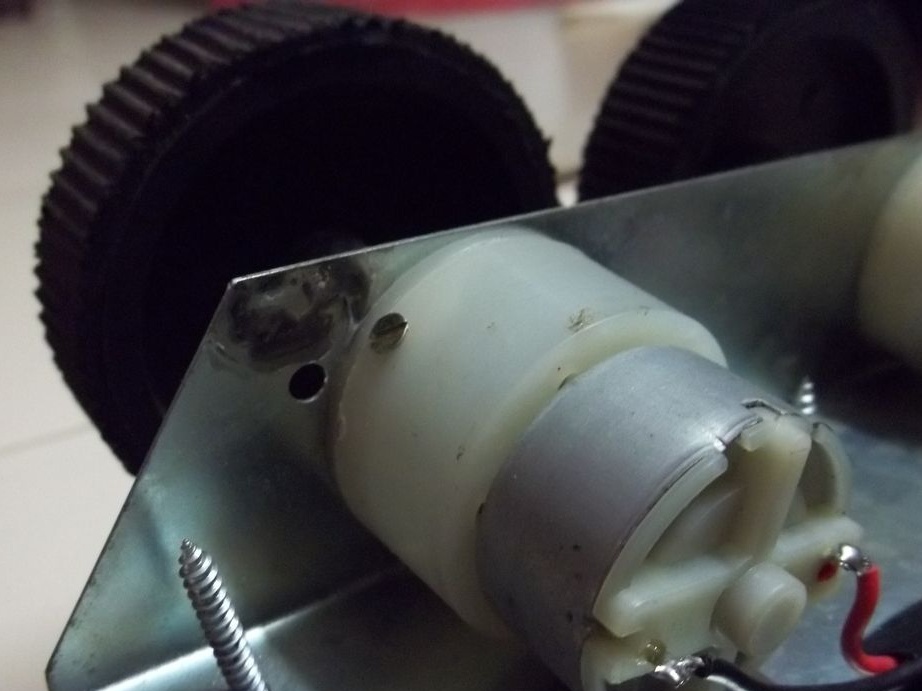
Erster Schritt. Räder und Fahrwerk.
Die Motorschrauben machten es einfach, sie mit Muttern am Chassis anzubringen. Die Räder sind bis zur Motorwelle eingebaut. Parallel dazu werden zwei rechte Motoren sowie zwei linke Motoren eingeschaltet. Wie das Chassis nach dem Einbau von vier Rädern und Motoren aussieht, ist auf dem Foto unten zu sehen.
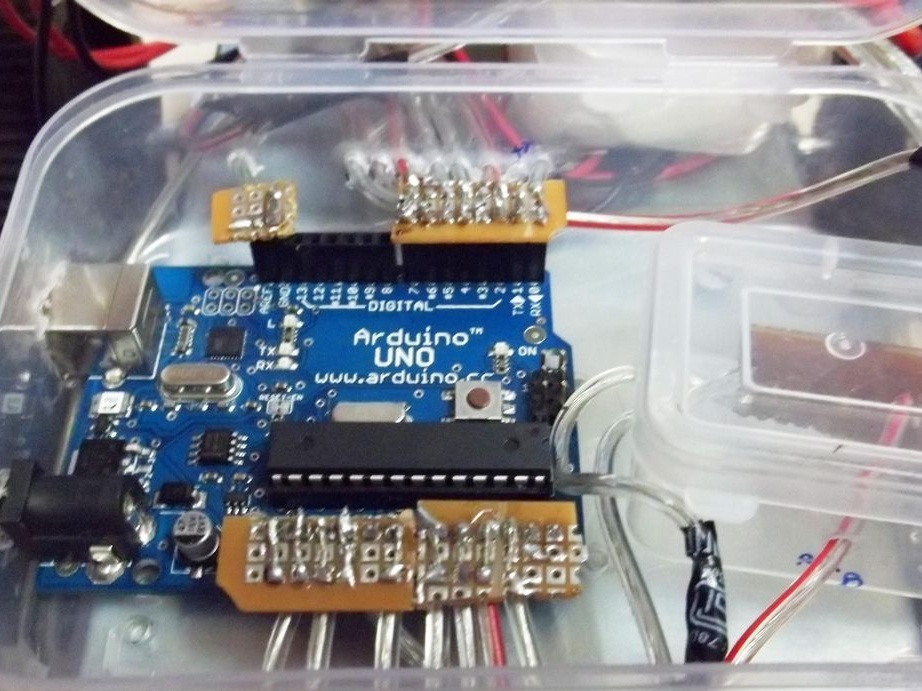
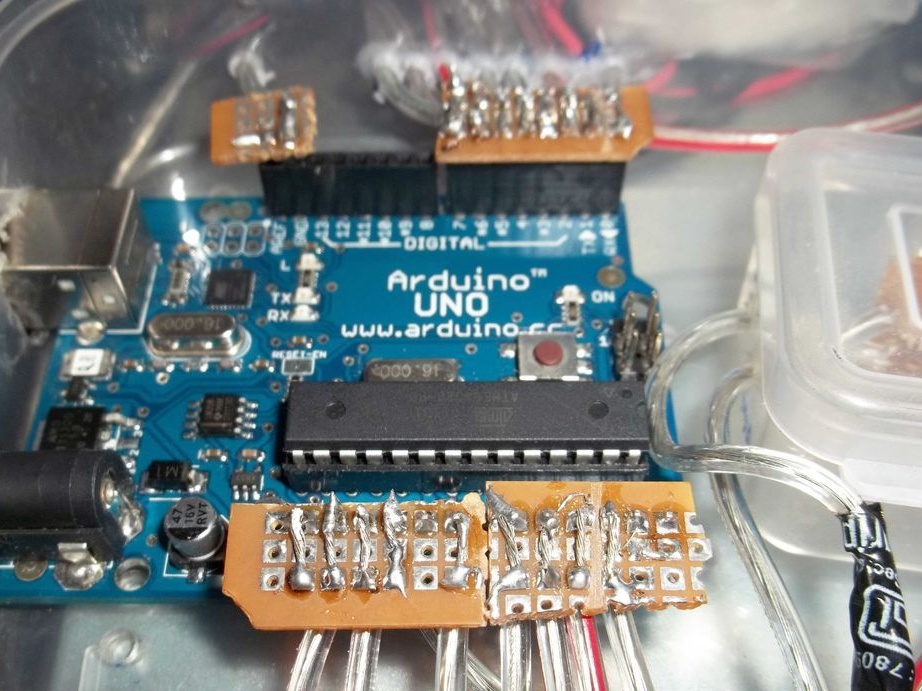
Schritt zwei Gehäuse für Arduino.
Das Falldiagramm für das Arduino ist in mehrere Teile unterteilt. Eine solche modulare Designlösung wird in Zukunft helfen, die Schaltung zu unterstützen oder eine mögliche Fehlfunktion zu beseitigen. Wenn eine der Komponenten ausfällt oder durchbrennt, kann sie schnell und ohne Unterbrechung des Designs ausgetauscht werden. Die Box für Arduino wurde wie folgt erstellt:
- Aus dem Steckbrett wurden vier Teile geschnitten, zwei davon mit Löchern der Größe 8x3, die zweiten beiden Teile 6x3.
- BLS-Stifte wurden an jeder Platine auf der langen Seite angelötet.
- Jeder Stift auf dem Steckbrett wurde zusätzlich mit etwa 10 cm langen Drähten verlötet. Dies geschah, damit sich die Drähte nicht vom Arduino lösen, da sich die Last nun gleichmäßig zu verteilen begann.
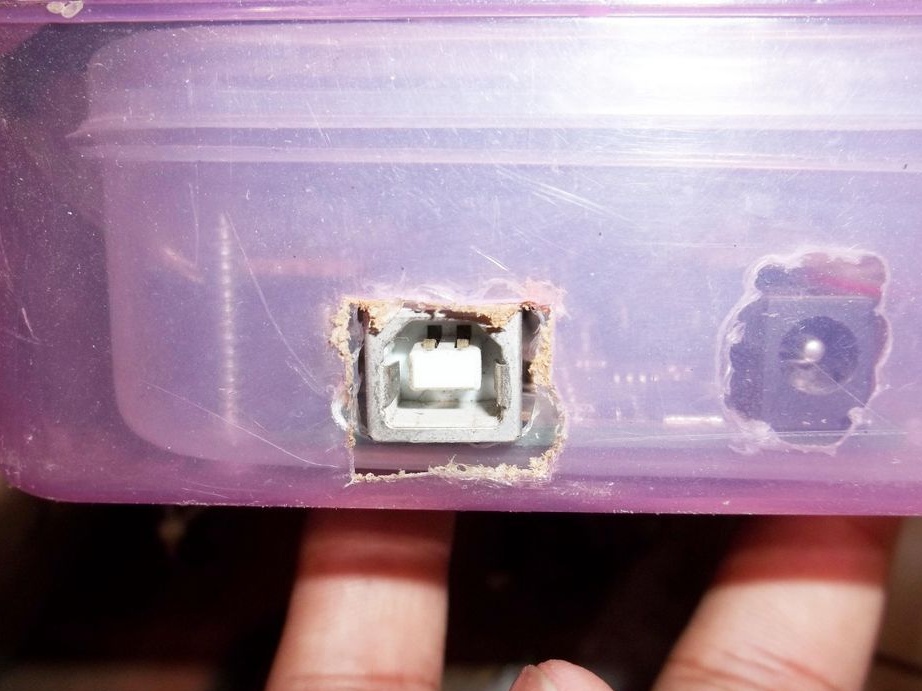
- Als nächstes wurde die Arduino-Karte so in das Gehäuse eingelegt, dass der USB-Ausgang die Wand berührte. Für diese Ausgabe wurde ein Loch ausgeschnitten. Dies hilft, zusätzliche Programme in die Maschine zu laden oder Korrekturen an vorhandenen Programmen vorzunehmen. An den Seiten der Box wurden Löcher für die Drähte geschnitten, die von der Platine ausgehen würden. Zusätzliche Löcher wurden am Boden der Box unter den Arduino-Montageanschlüssen herausgeschnitten.


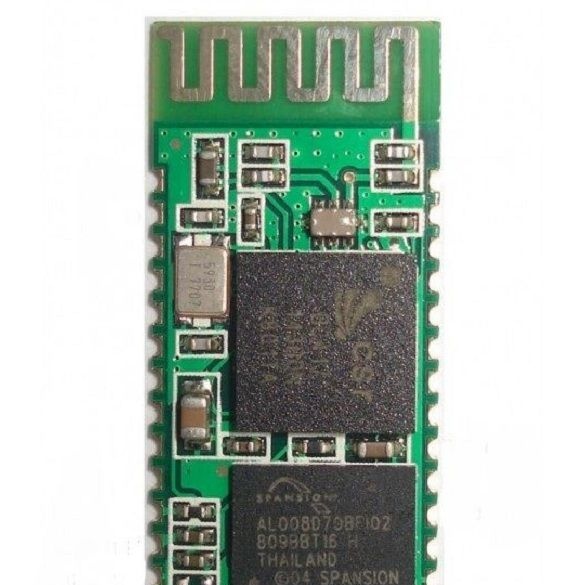
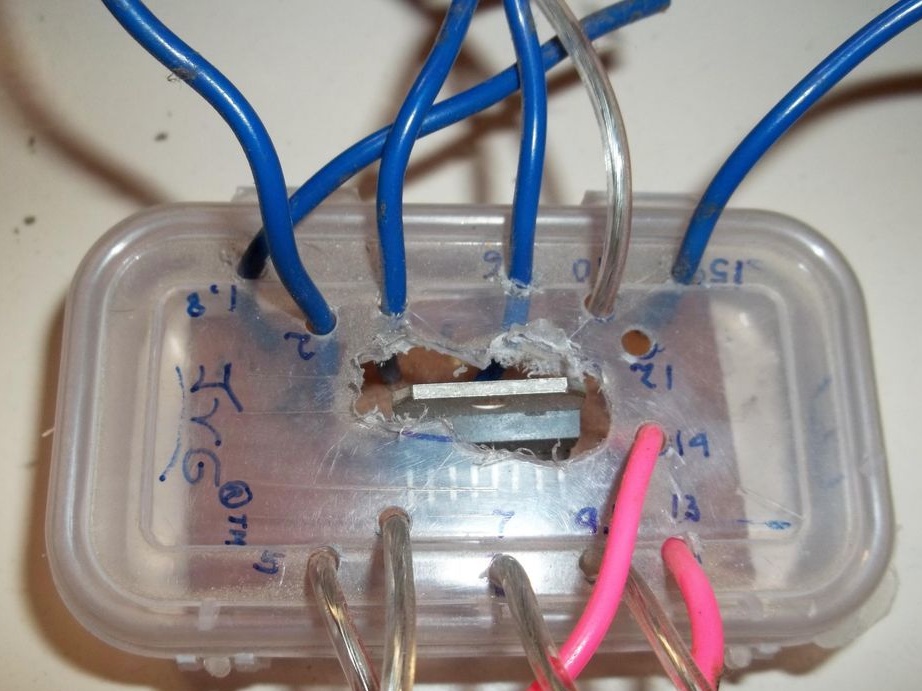
Schritt drei Bluetooth-Transceiver.
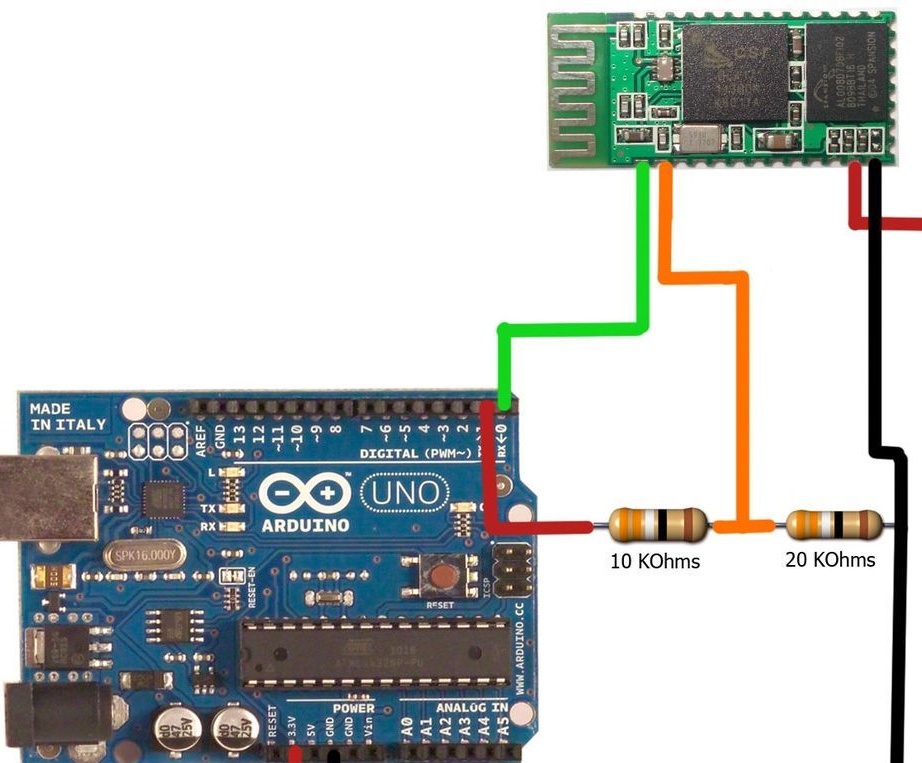
Das Löten von Drähten an einen Bluetooth-Transceiver ist die schwierigste Aufgabe bei der Montage dieses Projekts. Dem Autor fehlte beim Löten wirklich eine dritte Hand. Es wurden vier 10 cm lange Leiter verwendet, die an die Stifte 1 (Tx), 2 (Rx), 12 (+ 3,3B) und 13 (GND) gelötet wurden. Jetzt könnte der Transceiver in ein Gehäuse mit vorbereiteten Löchern für die Drähte eingesetzt werden. Der Autor hat die Drähte auf die Box geklebt, um zu verhindern, dass die Drähte die Kontakte abbrechen.



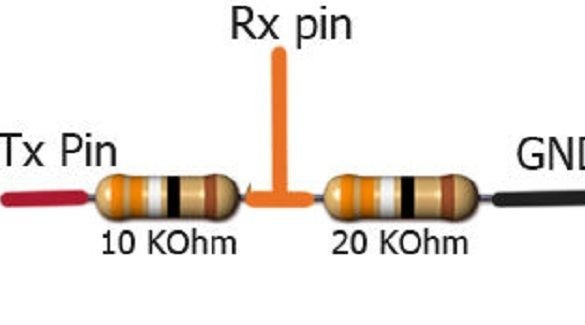
Der vierte Schritt. Gehäuse für Widerstände.
Aufgrund der Tatsache, dass der Arduino Tx-Ausgang ein Signal mit einer Spannung von 5 V sendet und das Bluetooth-Modul mit einer Spannung von 3,3 V arbeitet, war es erforderlich, 5 V in 3,3 V umzuwandeln. Für diese Aufgabe verwendete der Autor einen Spannungsteiler. Gemäß der unten angegebenen Schaltung löte er einen Widerstand an das verbleibende Stück des Steckbretts. Natürlich war es möglich, diese Schaltung in ein Arduino-Gehäuse zu stecken, aber es gab nicht genügend Platz, so dass der Autor eine separate für Widerstände herstellte.


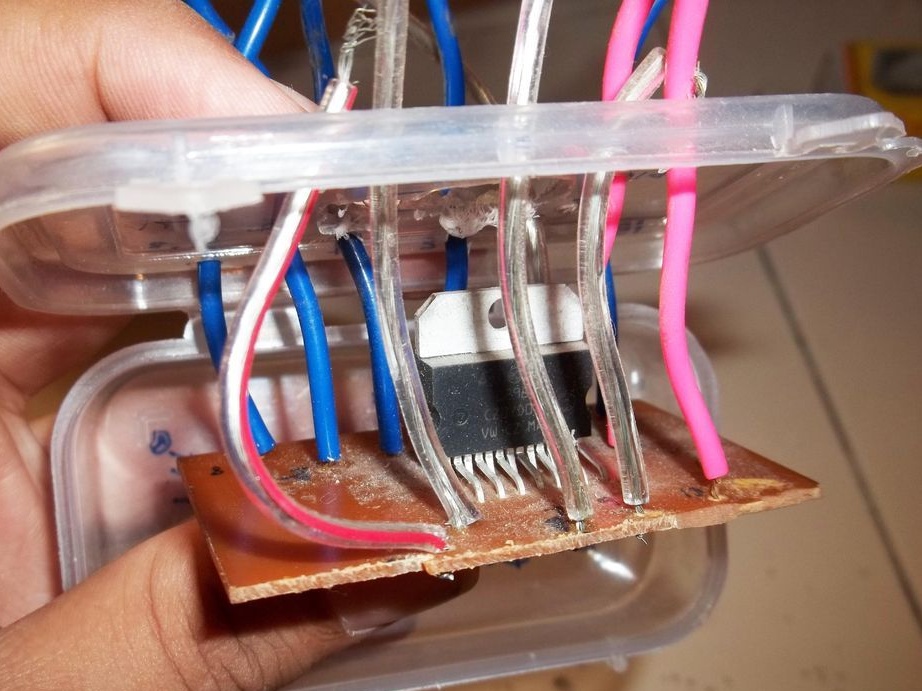
Schritt fünf Lokführer.
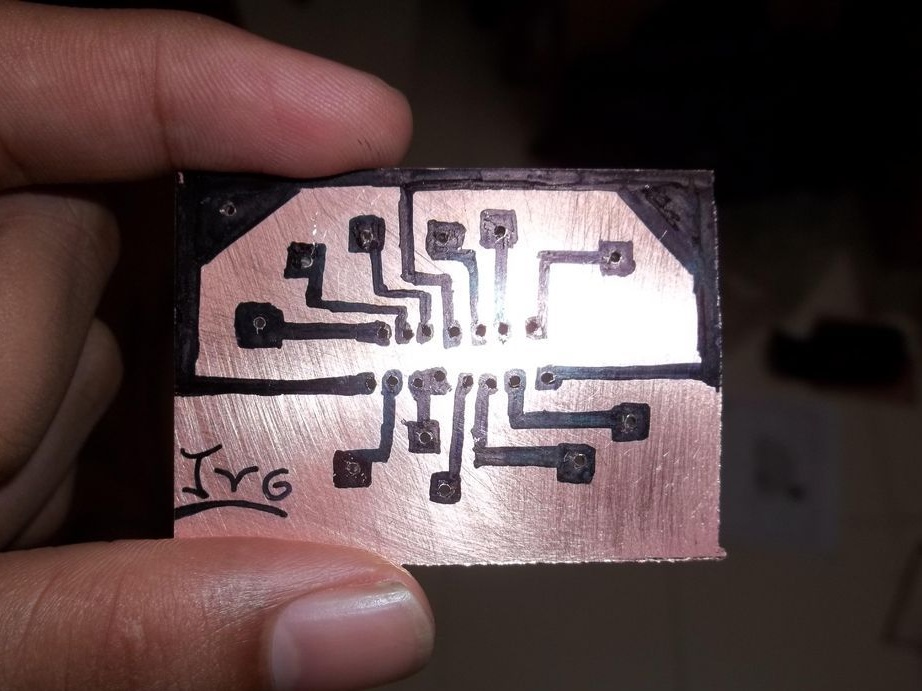
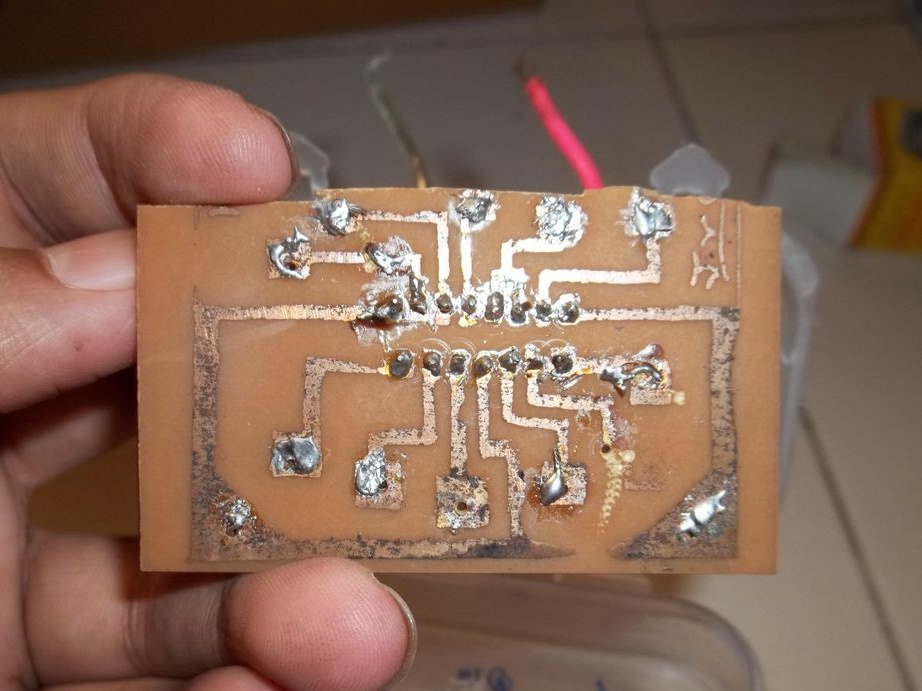
Der Autor verwendet einen Doppeltreiber mit einem H-Bridge L298 IC, er steuert vier Motoren. Für ihn hat der Autor eine Platine erstellt, um ihm das Löten von Drähten zu erleichtern, die Platine selbst auf dem Foto unten. Nach dem Löten wurde der Treiber auch in ein separates Gehäuse mit Löchern für die Drähte gebracht.
Schritt sechs Die Endmontage.
Jede einzelne Komponente ist gemäß dem Schema mit dem Arduino verbunden.
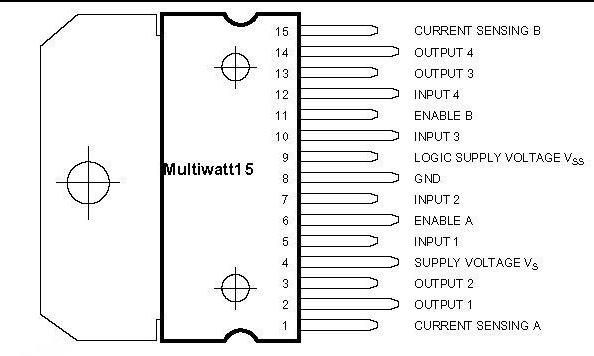
Die Verbindung des Motortreibers mit Arduino erfolgte gemäß dieser Pinbelegung:
1 bis GND
2 bis zum ersten Kontakt der linken Motoren
3 zum zweiten Kontakt der linken Motoren
4 bis 12V Batterie
5, um Arduino 2 zu stecken
6 zum Stift Arduino 3
7, um Arduino 4 zu stecken
8 bis GND
9 bis 5V mit Arduino
10, um Arduino 5 zu stecken
11, um Arduino 6 zu stecken
12 zum Stift Arduino 7
13 bis zum ersten Kontakt der richtigen Motoren
14 zum zweiten Kontakt der rechten Motoren
15 bis GND
12 V wurden an den Vin Arduino Pin und Pin 4 von L298 angeschlossen. GND Arduino bzw. GND Stromversorgung.
Siebter Schritt. Programm für Arduino.
Damit das Programm ordnungsgemäß funktioniert, musste die Amarino-Bibliothek installiert werden, die heruntergeladen werden kann. Sie können den Quellcode für Arduino unter dem Artikel herunterladen.
Schritt acht. Software für Android
Amarino Library ist ein Toolkit für die Arbeit mit Android-Smartphones. Durch die Installation einer zusätzlichen Anwendung auf Ihrem Telefon können Sie mit dem Schreiben eines Programms beginnen.
Amarino App und Plugin können von heruntergeladen werden. Nach der Installation auf dem Telefon musste nur noch das Gerät eingeschaltet und eine Verbindung hergestellt werden. Wählen Sie den Abschnitt Ereignisse hinzufügen-> Beschleunigungssensor.
Video mit der Installation von Amarino und seinen Plugins:
Die Geschwindigkeit der Maschine entspricht der Neigung des Telefons. Wenn sich die Maschine in die falsche Richtung bewegt, müssen Sie die Drähte von den Motoren austauschen.