


Ich habe einen Teil meines Entwurfs aus der Montageanleitung für Lego Technic 42049 und Lego Technic 42041 entnommen. Der Rest ist meine Improvisation. Zur Steuerung verwende ich das Bluetooth-Modul, das dem Android-Gerät oder Computer zugeordnet ist. Also brauchen wir:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5 V AT Mega 328
- Motortreiber L9110S
- 1 Servoantrieb SG-90
- Bluetooth-Modul HC-05 oder gleichwertig
- USB-UART für Arduino-Firmware
- Motorgetriebe 6v 1: 150 100 U / min
- 2 LEDs
- 2 Widerstände 150 Ohm
- Kondensator 10v 1000uF
- 2 einreihige Kämme PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1,2 V 1000 mA-Batterien
- Stecker Papa-Mama zwei Pin zum Draht
- Homutik
- Drähte in verschiedenen Farben
- löten
- Kolophonium
- Lötkolben
- Schrauben 3x20, Muttern und Unterlegscheiben für sie
- Schrauben 3x40
- Schrauben 3x60
Schritt 1 Hinterachsbaugruppe
Das Vorwärts- und Rückwärtsfahren wird von einem Getriebemotor mit einem 6-V-Motor, einem Übersetzungsverhältnis von 1: 150 und einer Leerlaufdrehzahl von 100 U / min ausgeführt. Sie können ein anderes Übersetzungsverhältnis ausprobieren, aber meiner Meinung nach ist dies optimal. Die Getriebeachse auf beiden Seiten muss kreuzförmig eingeschnitten und mit Legodetails versehen sein:
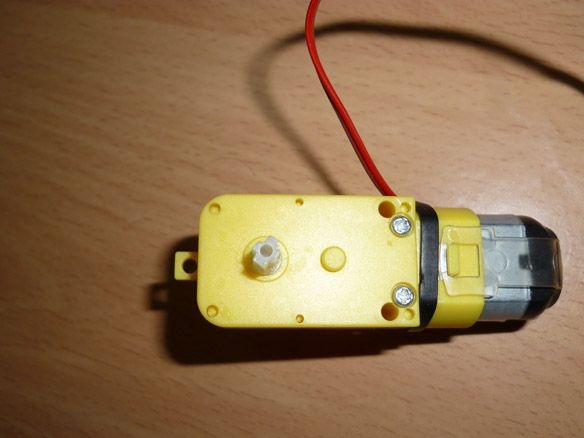
Als nächstes sammeln wir die Basis der Hinterachse gemäß den Anweisungen von Lego 42029 Teil 1, beginnend mit 3 Seiten bis einschließlich 8. Fügen Sie einige Details hinzu, damit Sie den Motor und das Getriebe einbauen können.
Online-Datei anzeigen:
Online-Datei anzeigen:



Schritt 2 Montage der Vorderachse
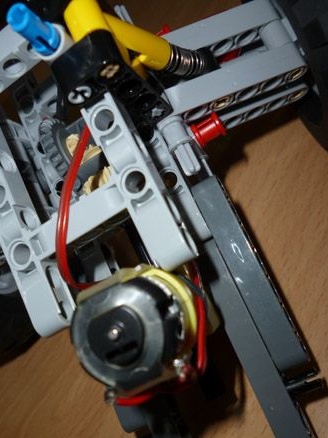
Wir montieren den vorderen Teil der Aufhängung gemäß den Anweisungen von Lego 42029 Teil 1 von Seite 21 bis 23. Wir nehmen das Trapez aus dem zweiten Teil von Lego von Seite 6 bis 11. Der Servo SG-90 eignet sich gut zum Drehen der Räder. Um es an unserem Modell zu befestigen, muss ein Durchgangsloch mit einem Durchmesser von 3,2 mm vorsichtig gebohrt werden, um die inneren Teile des Servos nicht zu berühren, oder es einfach mit einem Schreibwarenmesser geschnitten werden. Schneiden Sie auch die hervorstehenden Teile ab („Flügel“ zur Befestigung). Wir setzen einen Bolzen in das Loch ein und befestigen ihn mit Muttern. Auf der Servowelle setzen wir einen Hebel mit einem Schraubteil von lego auf:





Schritt 3 Montage der Basis und der Kabine
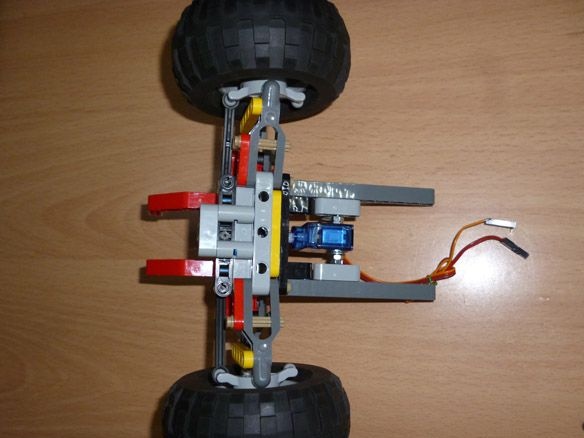
Wir verbinden beide Brücken wie auf dem Foto gezeigt:
Wir bauen die Kabine gemäß den Anweisungen des Lego 42041 zusammen. Ab den Seiten 39 bis 47 des ersten Teils. Weiter von Seite 5 bis 28 des zweiten Teils. Sowie die Stoßstange auf den Seiten 38 bis 43 des zweiten Teils der Anleitung.
Online-Datei anzeigen:
Online-Datei anzeigen:


Online-Datei anzeigen:
Online-Datei anzeigen:
Schritt 4 Elektrik
Zur Steuerung verwenden wir das Arduino Pro Mini und das Bluetooth-Modul. Das Pro Mini kann durch jedes andere Arduino-Board ersetzt werden. Ich habe mich für den Pro Mini entschieden, deshalb ist er der kleinste. Der Motortreiber wird zum Anschließen des Motors benötigt.
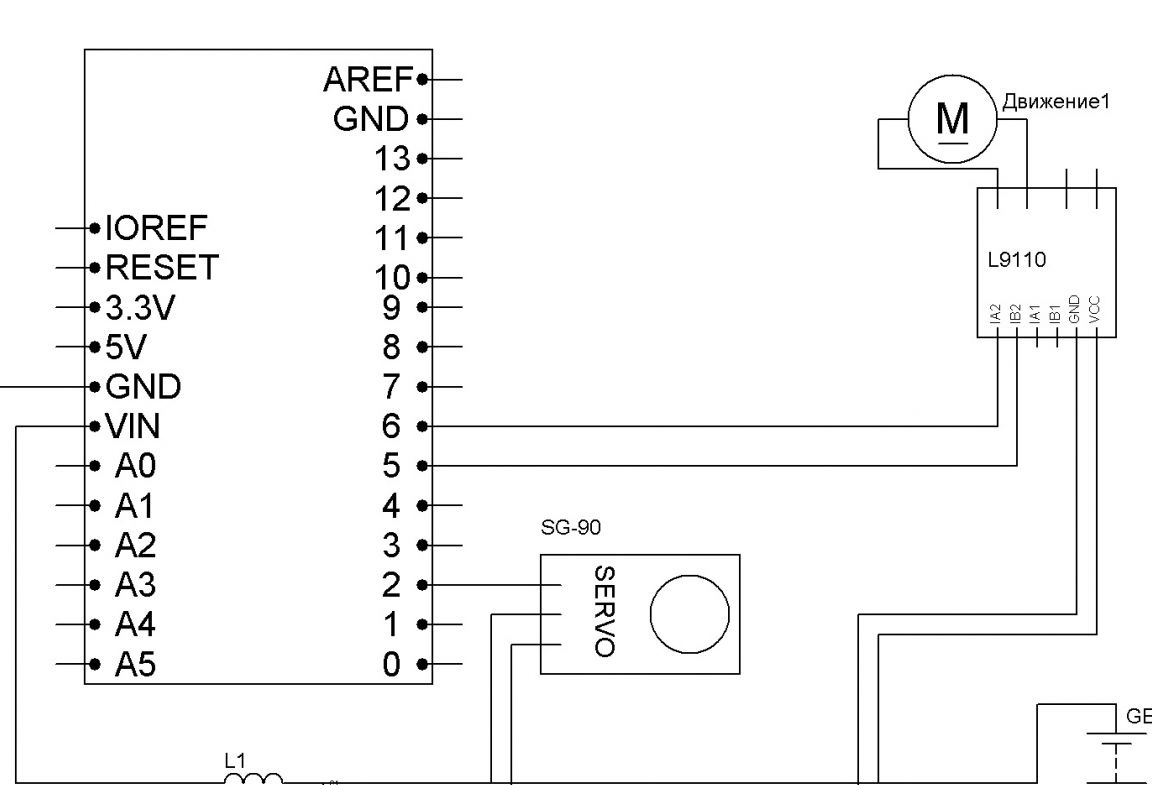
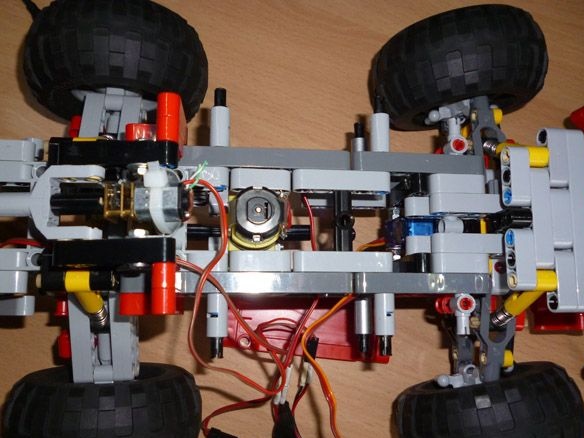
Anschluss aller Komponenten an Dupont-Mutter-Mutter-Kabel. Stromversorgung - 6 in Reihe geschaltete NI-Mn 1,2 V 1000 mA-Batterien. Ein Kondensator mit geringer Leistung, ein Induktor, den Sie auch finden, müssen Sie die Leistung des Mikrocontrollers stabilisieren. Die Anoden der beiden LEDs sind mit 4-poligem Arduino verbunden, die Kathoden mit GND. Für die verwendeten LEDs werden Widerstände ausgewählt. Wickeln Sie die Batterien der Einfachheit halber mit Klebeband auf.

Wir kleben alles auf ein doppelseitiges Klebeband auf der Grundlage von:
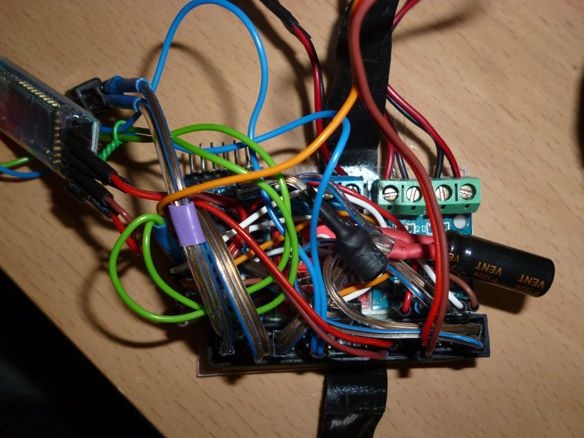
Wir stellen unseren Elektriker zwischen die Räder und schließen:
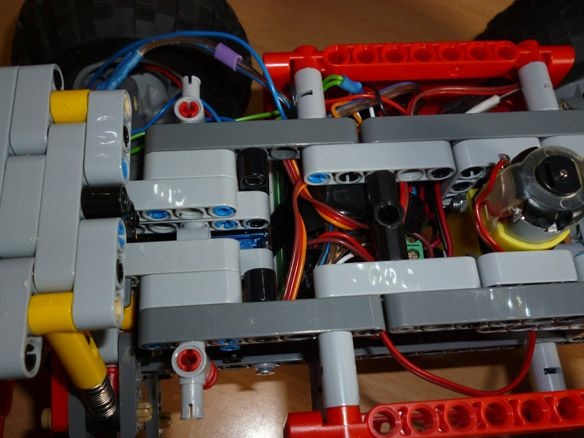
Fügen Sie ein paar Striche hinzu:


Schritt 5 Bluetooth-Einrichtung
Die derzeit günstigsten Bluetooth-Module sind der HC-05 und der HC-06. Sie sind in chinesischen Online-Shops reichlich vorhanden. Die Unterschiede zwischen ihnen bestehen darin, dass der erste sowohl im Master-Modus (Slave) als auch im Slave-Modus (Master) arbeiten kann. Das zweite ist ein reines Slave-Gerät. Mit anderen Worten, HC-06 kann ein gekoppeltes Gerät nicht erkennen und eine Verbindung damit herstellen, sondern nur dem Master gehorchen.
Kurze Eigenschaften der Module:
- Bluetooth-Chip - BC417143 hergestellt von
- Kommunikationsprotokoll - Bluetooth-Spezifikation v2.0 + EDR;
- Aktionsradius - bis zu 10 Meter (Leistungsstufe 2);
- Kompatibel mit allen Bluetooth-Adaptern, die SPP unterstützen;
- Die Größe des Flash-Speichers (zum Speichern von Firmware und Einstellungen) - 8 Mbit;
- die Frequenz des Funksignals - 2,40 .. 2,48 GHz;
- Host-Schnittstelle - USB 1.1 / 2.0 oder UART;
- Stromverbrauch - Der Strom während der Kommunikation beträgt 30-40 mA. Der durchschnittliche Stromwert beträgt ca. 25 mA. Nachdem die Verbindung hergestellt wurde, beträgt die Stromaufnahme 8 mA. Es gibt keinen Ruhemodus.
Normalerweise werden Module als zwei miteinander verlötete Platinen verkauft. Das kleinere ist ein Fabrikmodul, das in verschiedenen Bereichen weit verbreitet ist elektronisch Geräte. Groß - ein spezielles Steckbrett für Heimwerker.
So sehen die DIY-Module HC-05 und HC-06 aus:
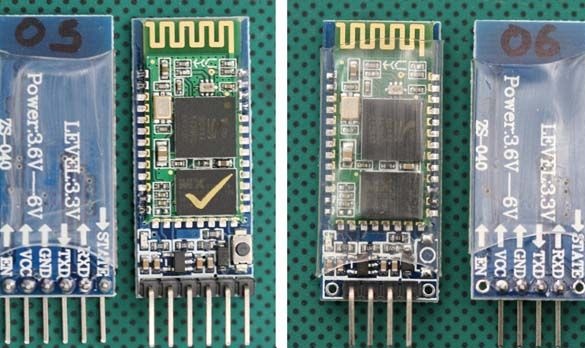
Grundsätzlich können Sie jedes beliebige Modul verwenden. Ein Modul ohne Steckbrett kostet weniger, aber dann müssen Sie sich um die 3,3-V-Stromversorgung des Moduls kümmern und sich selbst quälen, indem Sie Drähte an das Modul anlöten. Ich habe meiner Meinung nach das Optimum im Preis-Leistungs-Verhältnis HC-06 gewählt.
Wir verbinden uns wie folgt:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5 V - VCC
GND –GND
Für einen ordnungsgemäßen Betrieb muss das Modul konfiguriert sein. Wir werden AT-Befehle konfigurieren, die in das Terminalfenster eingegeben werden. Ich gebe ein Beispiel für die Einrichtung des HC-05-Moduls. Wenn Sie eine andere Einstellung haben, kann dies anders sein. Damit unser Modul Befehle empfängt, flashen wir zuerst das Arduino mit der folgenden Firmware:
In diesem Fall fungiert Arduino als Brücke zwischen Computern und dem Modul. In der Firmware verwende ich die SoftwareSerial-Bibliothek. Bei hohen Geschwindigkeiten funktioniert es instabil. Wenn Sie eine hohe Geschwindigkeit wünschen, können Sie das Modul direkt an die Arduino RX- und TX-Kontakte anschließen und die Firmware neu schreiben. In meinem Fall werden wir jedoch mit einer Geschwindigkeit von 9600 mit dem Modul arbeiten. Öffnen Sie nach der Firmware das Terminal und geben Sie Folgendes ein:
"AT" (ohne Anführungszeichen) Die Antwort "OK" sollte kommen (dies bedeutet, dass alles richtig angeschlossen ist und das Modul funktioniert).
"AT + BAUD96000" (ohne Anführungszeichen) sollte die Antwort "OK9600" kommen.
Wenn Sie die richtige Antwort haben, fahren Sie mit dem nächsten Schritt fort.
Schritt 7 Firmware
Um die Firmware und die Firmware selbst zu schreiben, verwende ich die Arduino IDE. Die aktuelle Version für heute ist 1.8. Eigentlich Firmware:
Schritt 8 Richten Sie Ihr Telefon ein.
Auf einem Android-Telefon müssen Sie ein Programm installieren, um den Roboter über Bluetooth zu steuern. Es gibt viele von ihnen. Sie können "Bluetooth Arduino" in Google Play eingeben und nach Ihrem Geschmack auswählen. Ich mochte den BT Controller. Laden Sie es herunter und installieren Sie es auf Ihrem Android-Telefon oder -Tablet. Als nächstes müssen Sie über die Android-Einstellungen eine Verbindung mit unserem Modul herstellen. Das Passwort für die Verbindung lautet "1234" oder "0000". Konfigurieren Sie als Nächstes das Programm für die entsprechenden Befehle. Die Liste ist unten.
Schritt 9 Computer-Setup (falls erforderlich)
Bei Bedarf oder einfach nur zur Steuerung können Sie einen Computer oder Laptop verwenden. Dazu muss der Computer über Bluetooth verfügen. Wir stellen die Kommunikation mit unserem Modul über die Steuerungen am Computer her. Als nächstes benötigen wir ein Terminal, um Befehle zu senden. Beliebig für Sie.Nach dem Aufzeichnen der Firmware erfolgt die Steuerung über die folgenden Tasten (Befehle):
W - vorwärts
S - zurück
A - links
D - richtig
F - Stop
G - Lenkrad
K - Scheinwerfer
L - Scheinwerfer aus
Die ständige Eingabe von Befehlen ist unpraktisch, daher empfehle ich, das Programm zum Senden von Befehlen zu verwenden. Ich benutze Z-Controller. Wählen Sie im Programm den Port (COM-Port, über den die Verbindung hergestellt wird) und konfigurieren Sie die Schlüssel für die Befehle. Richtig und intuitiv einrichten.
