

Guten Tag Liebhaber von Arduino! Im Internet habe ich einen ziemlich interessanten und spektakulären Roboter (oder ein Gerät, nennen Sie es wie Sie wollen) gesehen, der das Stak-Spiel „spielt“. Dabei werden dieselben Funktionsprinzipien verwendet, mit denen Sie einen Roboter herstellen können, der Spiele wie Geometrie-Dash, Klavier und andere Spiele spielen kann, bei denen Sie nur brauchen Stecken Sie mit einer bestimmten Reihenfolge in den Bildschirm. Was ich getan habe, bewerten Sie bitte in der folgenden Umfrage.
Wenn jemand interessiert ist, hier ein Video von der Arbeit dieses Roboters:
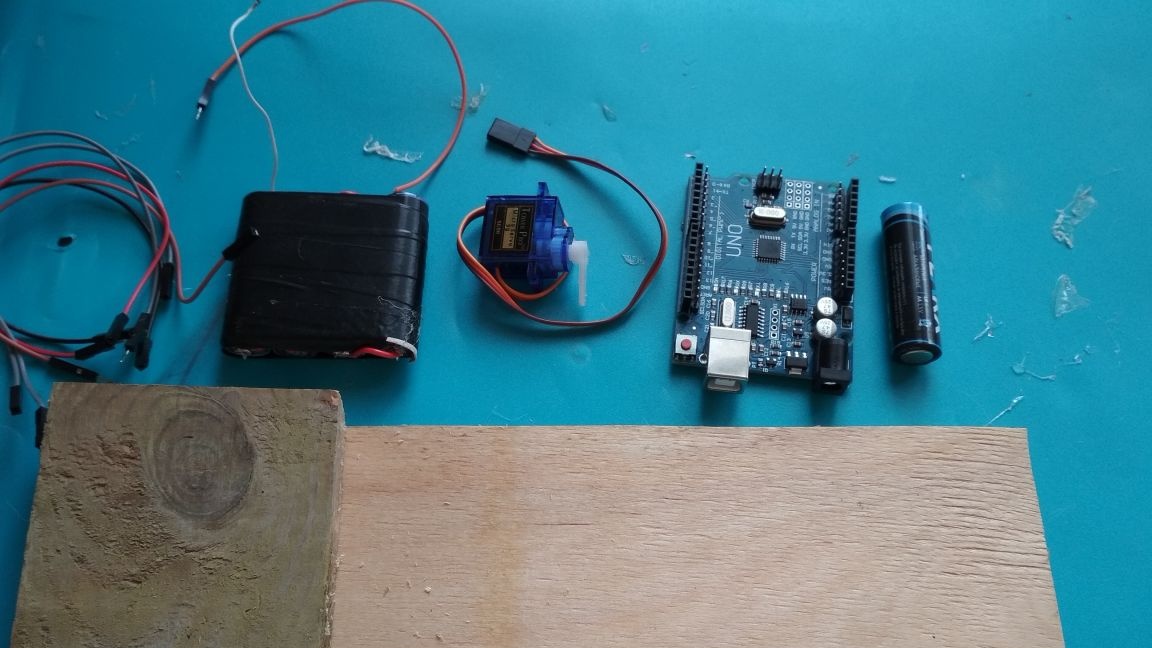
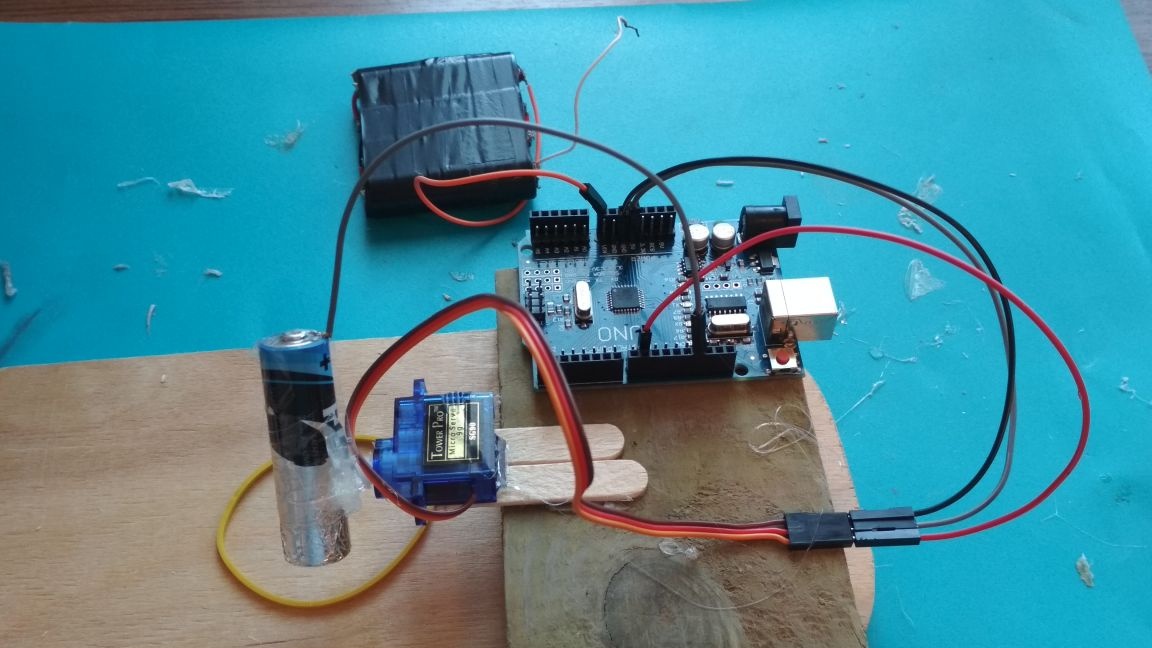
Und so brauchen wir für diesen "Roboter":
Zahlung Arduino Uno
- Verbindungsdrähte wie "Vater-Mutter" oder "Vater-Vater"
-Service
- ein Stück Sperrholz
- Ein Stück Brett mit einer Dicke von etwa 1 cm. Hauptsache, zweimal ist es dicker als Sperrholz
Eisstange
Stift
Folie (wenn kein Stift vorhanden ist)
-Batterie (wenn kein Stift vorhanden ist)
- Stromversorgung für 6-12 Volt (ich verwende 4 in Reihe geschaltete Fingerbatterien)
Von den Werkzeugen, die wir brauchen:
Schere
Thermokleber
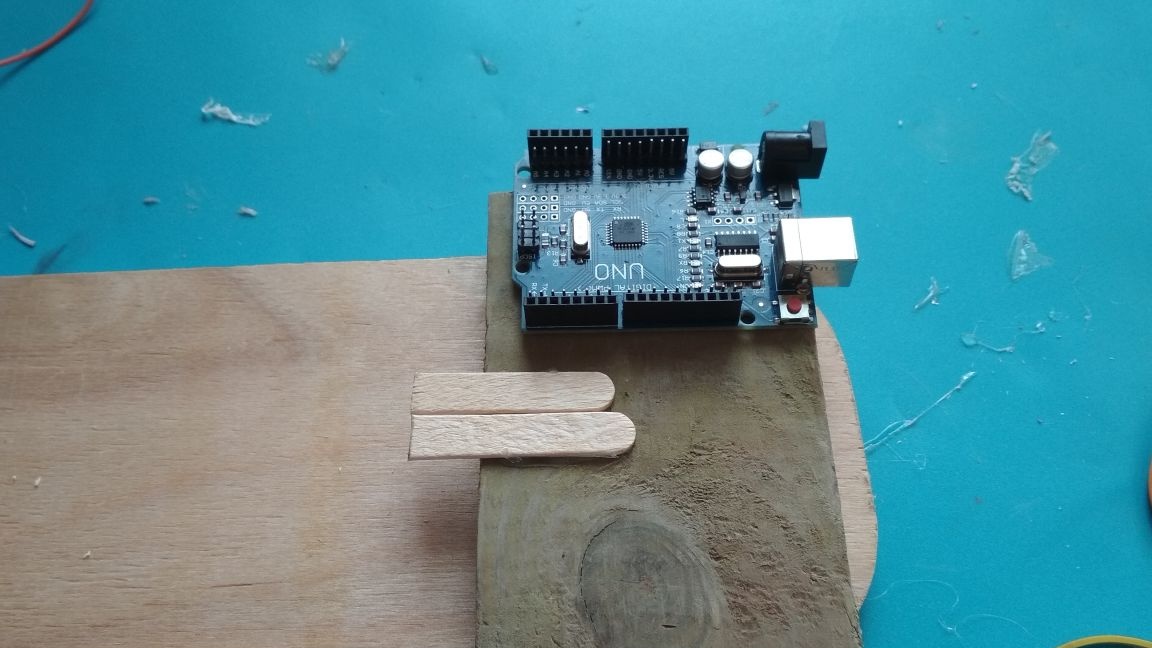
Das erste, was Sie tun müssen, ist, ein Stück, das doppelt so groß ist wie Ihr Telefon, aus einem Stück Sperrholz zu schneiden. Sie können es größer machen, und Sie müssen ein Stück in der Größe Ihres Telefons von der Platine abschneiden (ich habe etwas andere Größen hergestellt, aber das ist überhaupt nicht kritisch). Dann kleben wir unsere Rohlinge wie auf dem Foto gezeigt:

Nehmen Sie den Eisstock und schneiden Sie ihn in etwa die Hälfte:

Kleben Sie sie von der Sperrholzseite in die Mitte der Platte, wie auf dem Foto gezeigt:

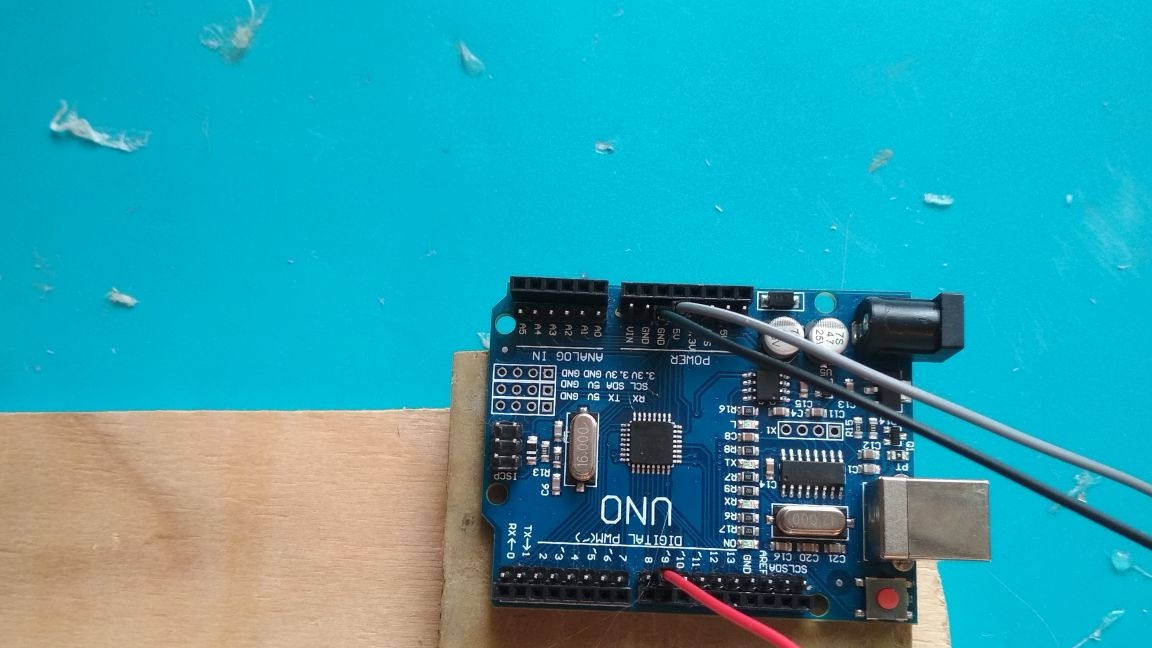
Wir kleben das Ardino Uno Board vom Rand des Boards:
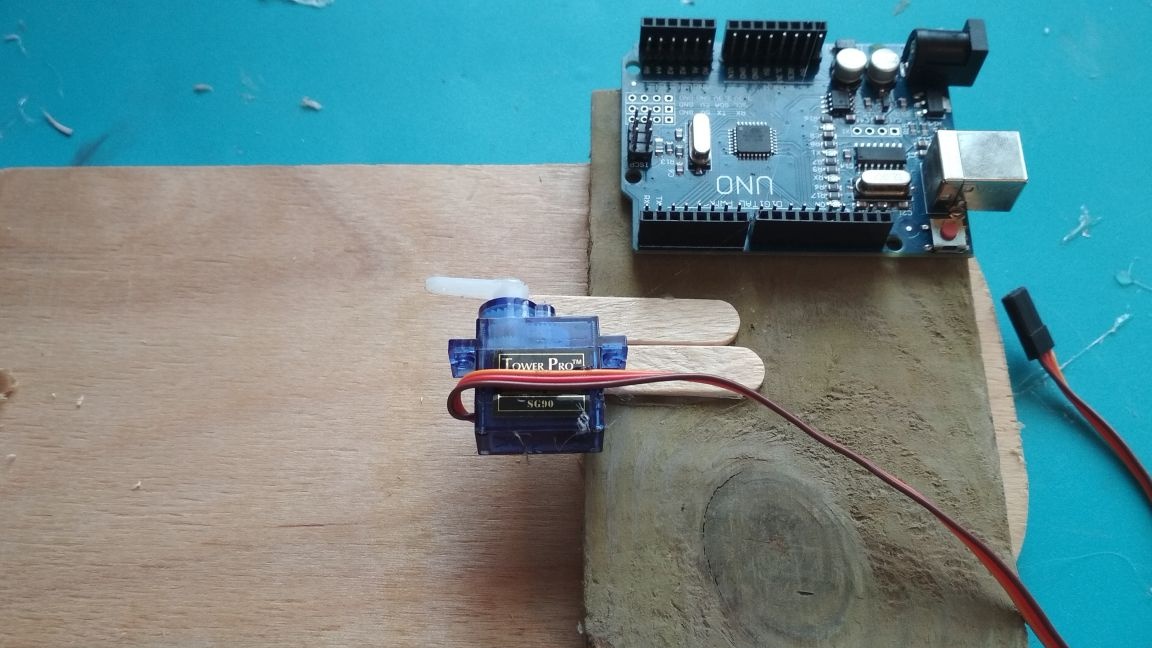
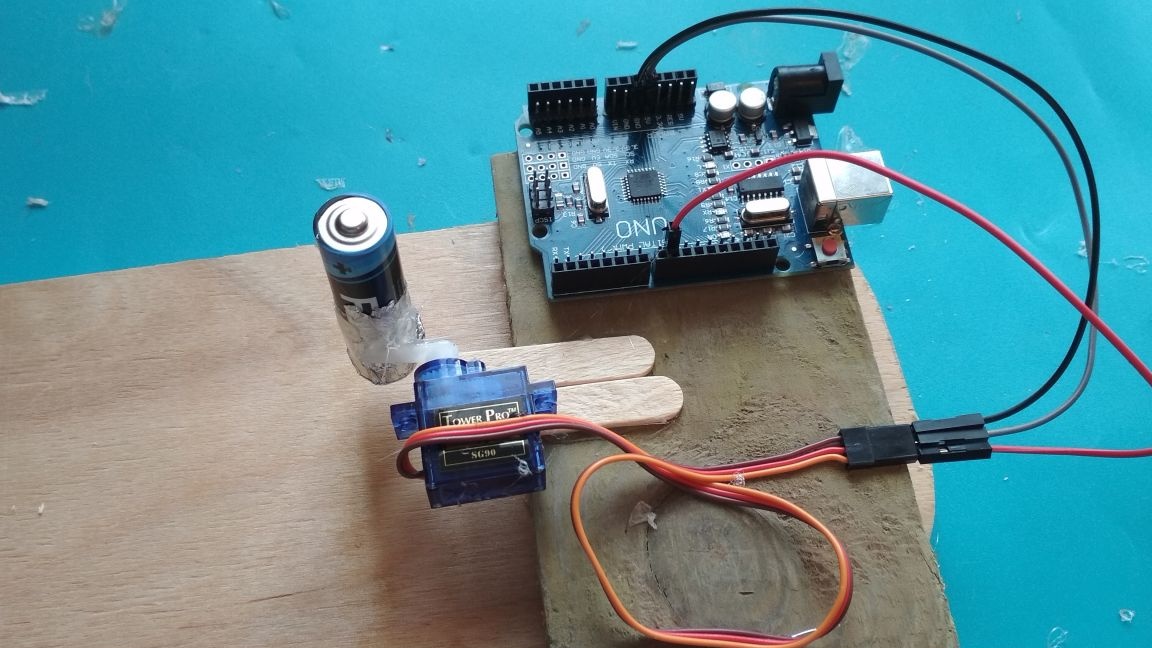
Wir nehmen den Servomotor und kleben die Drähte so, dass sie nicht stören:
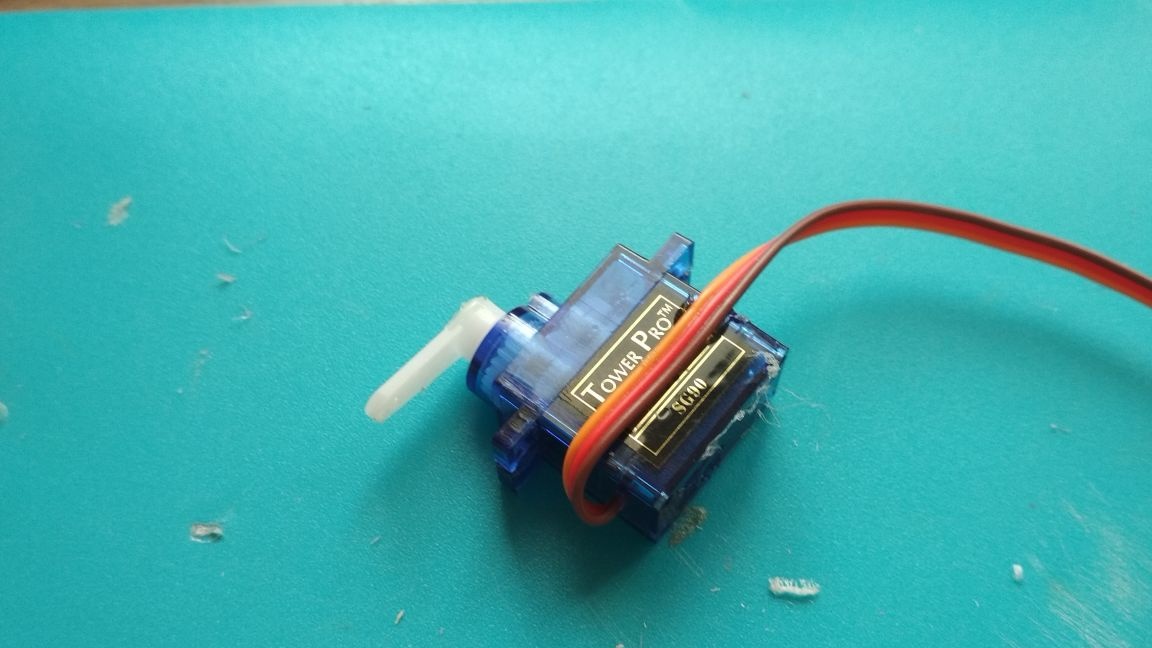
Kleben Sie den Servomotor an das Ende der Hälften der Eisstangen:
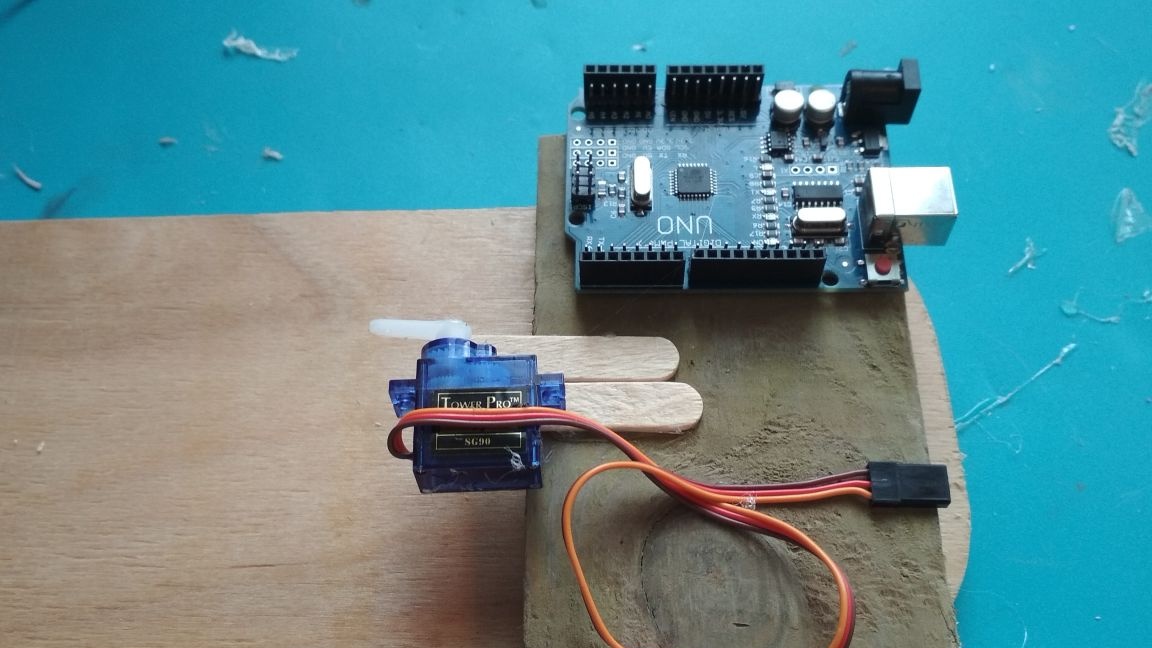
Wir verlegen die Drähte und kleben den Servomotorausgang an die Kante der Platine:
Fügen Sie 3 Vater-Mutter-Drähte hinzu, vorzugsweise in verschiedenen Farben, um nicht verwirrt zu werden
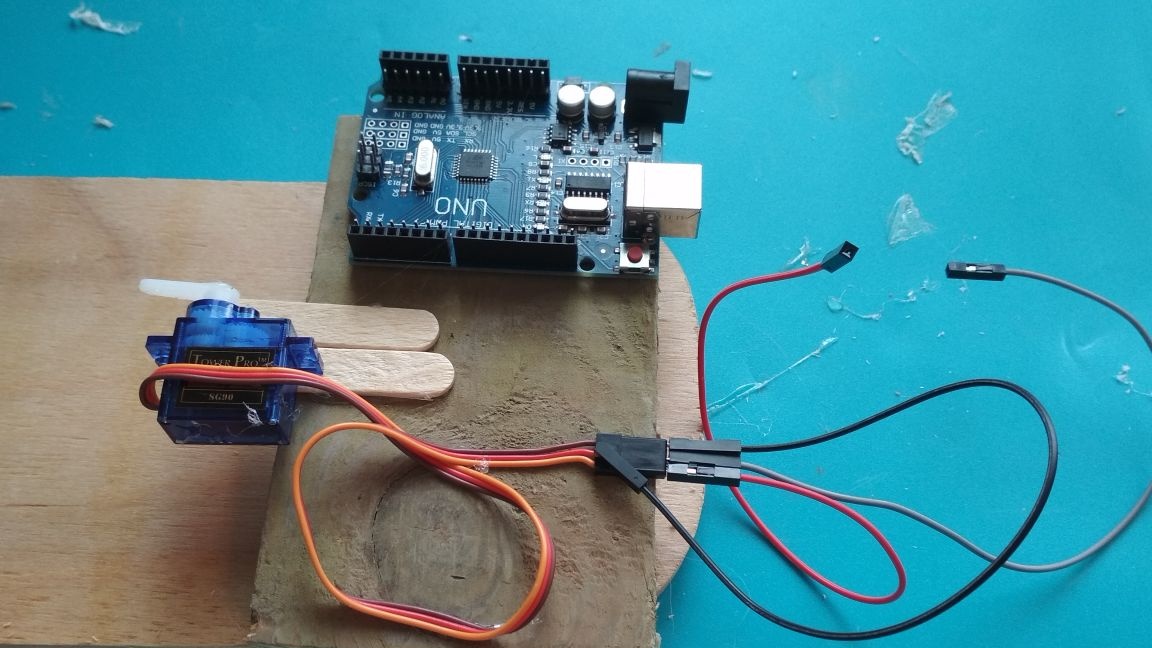
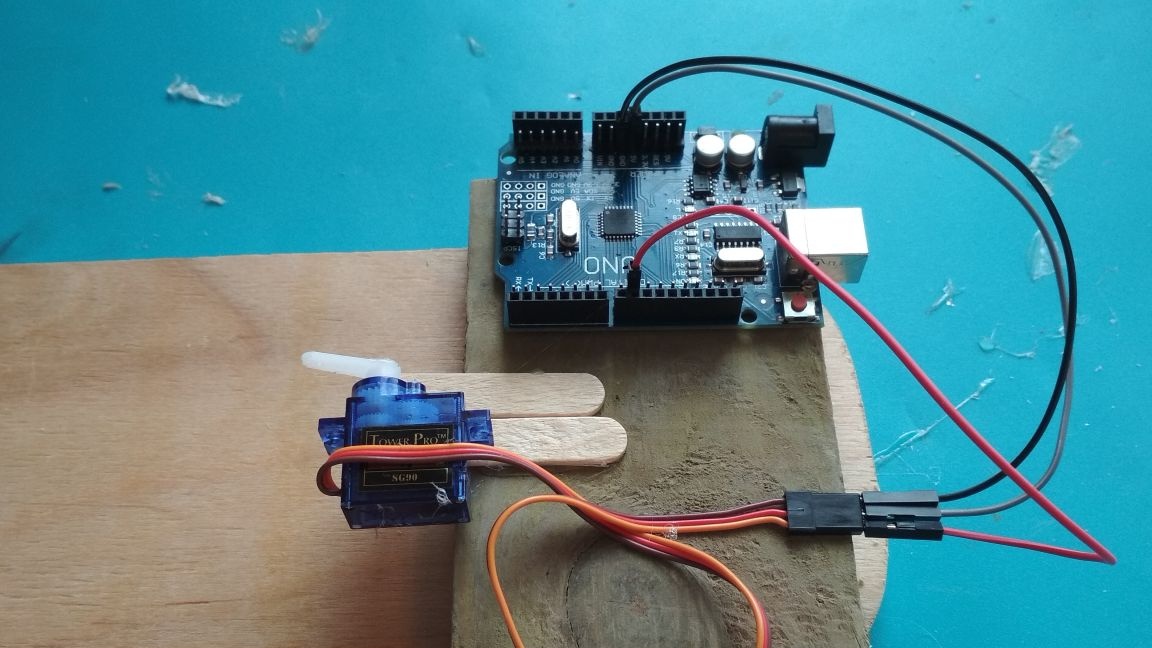
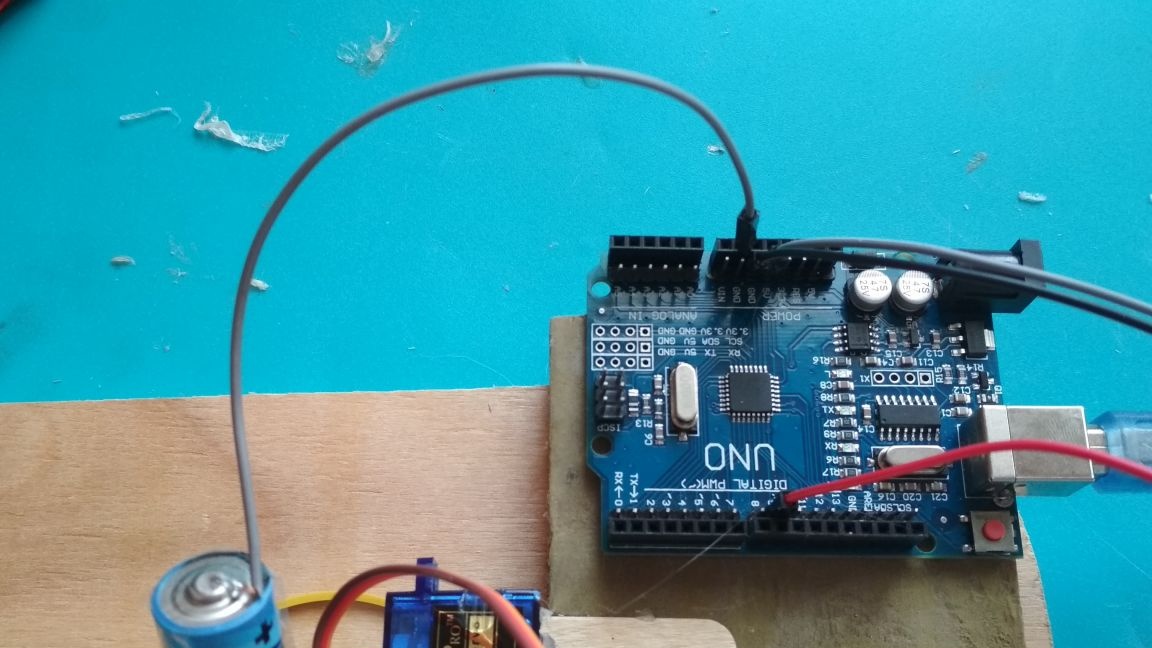
Wir verbinden den Servoantrieb wie folgt mit der Arduino-Platine:
brauner Draht zu gnd
-Rotdraht auf 5V
- orangefarbener Draht an 9 "digitaler Pin"
Wenn Sie keinen Stift wie meinen haben, dann verzweifeln Sie nicht, es ist sehr einfach.
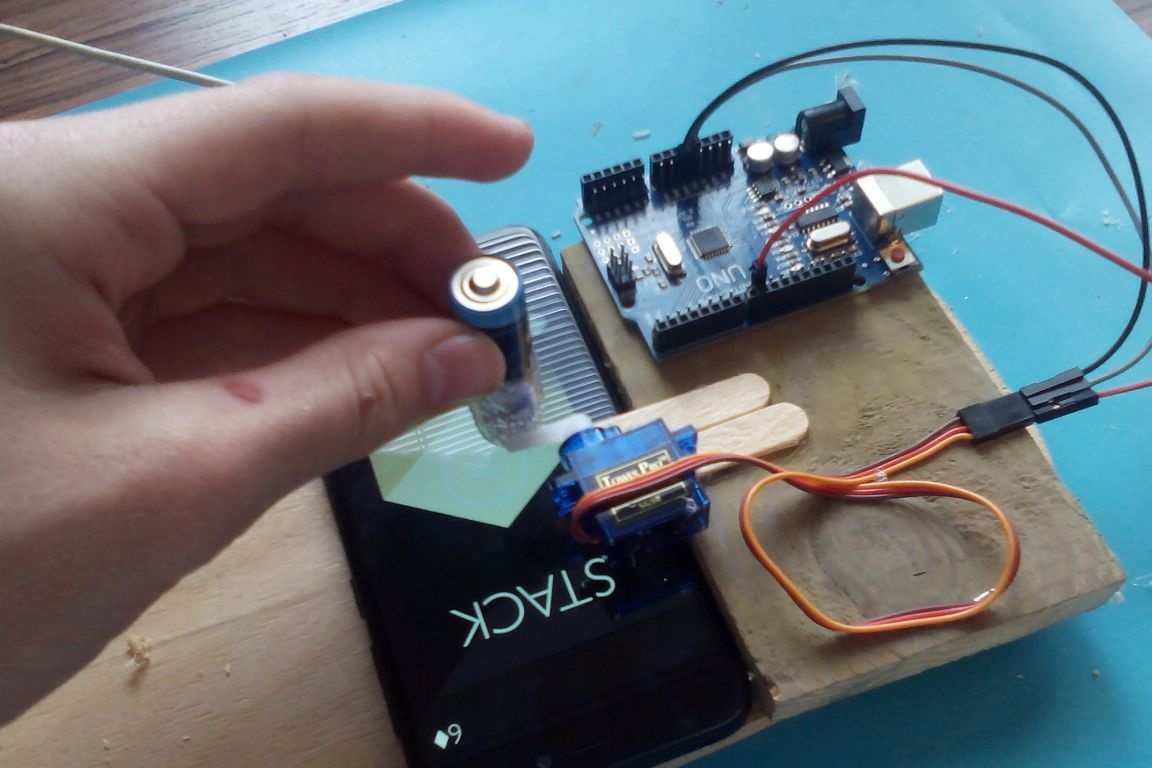
Wir nehmen eine normale Fingerbatterie und die negative Seite so fest wie möglich, wickeln sie mit Folie ein und kleben sie dann sehr fest:

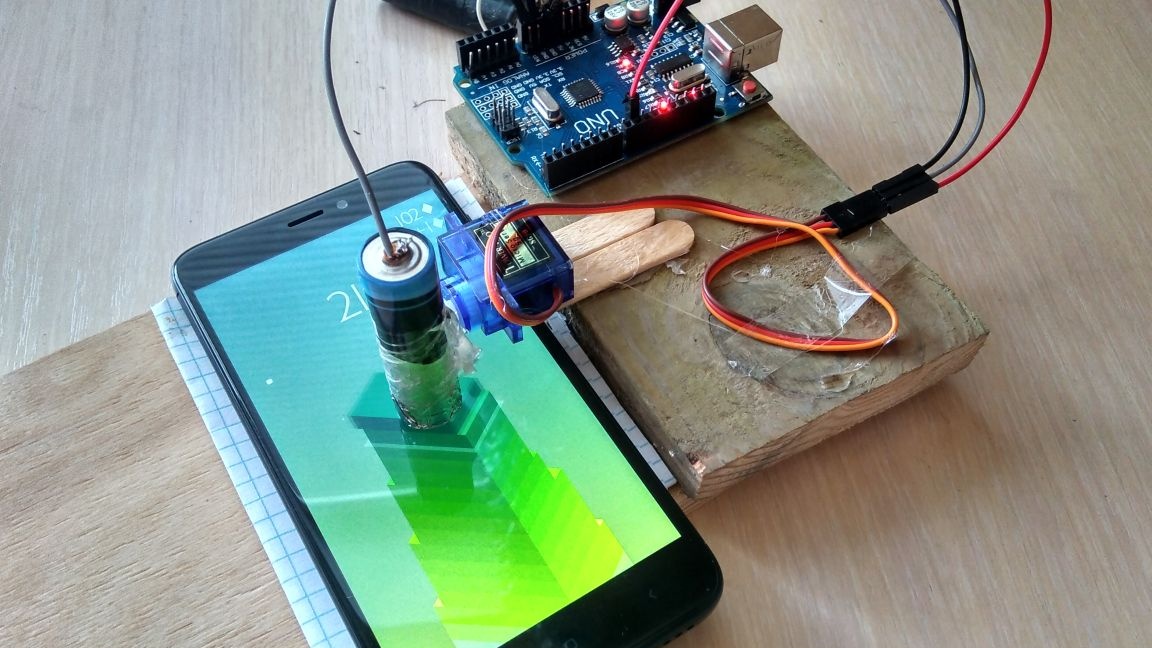
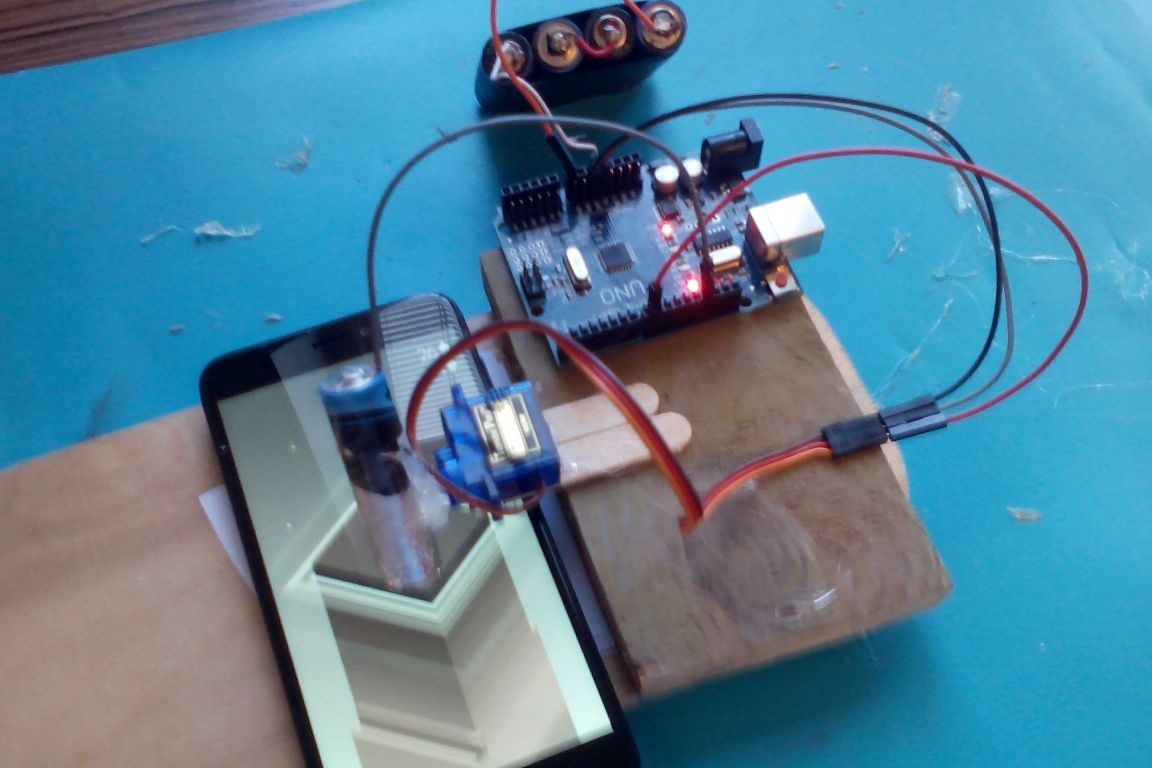
Jetzt müssen Sie das Telefon auf das Sperrholz unter dem Servomotor legen, den Akku oben anbringen und notieren, auf welcher Höhe wir unseren "Stift" kleben werden. Nachdem wir alles notiert haben, kleben Sie den „Stift“ fest in einem Winkel von 90 Grad fest auf den Hebel des Servomotors (der gleiche Winkel sollte sein, wenn Sie den „Stift“ auf das Telefon legen, als wir ihn gemessen haben). Alles sollte wie auf dem Foto gezeigt funktionieren:

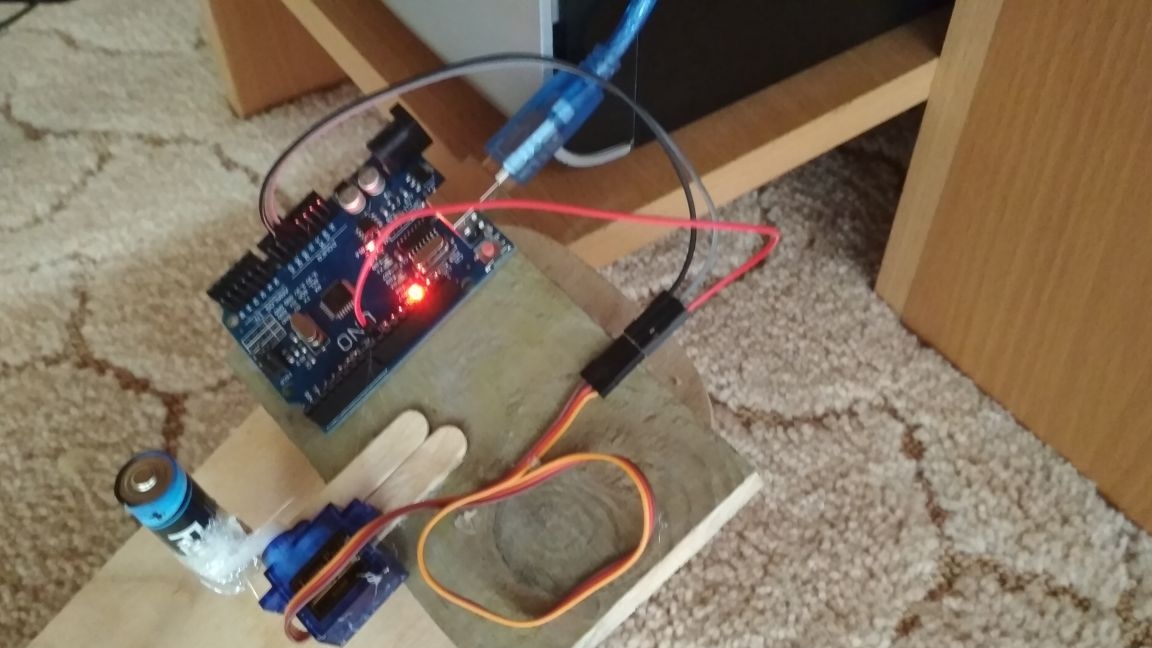
Jetzt verbinden wir unseren "Roboter" über den in der Arduino IDE konfigurierten Port mit dem Computer, führen die zuvor benannte Arduino IDE aus, kopieren die folgende Skizze und klicken dann auf die Schaltfläche "Herunterladen". Wenn alles richtig gemacht wurde, wird die Skizze fehlerfrei geladen und nach einigen Sekunden beginnt der Servomotor seine Arbeit. Wenn Sie signifikante Unterschiede in der Größe des Stifts und des Servomotors haben, machen Sie diese Skizze selbst, es ist ganz einfach.
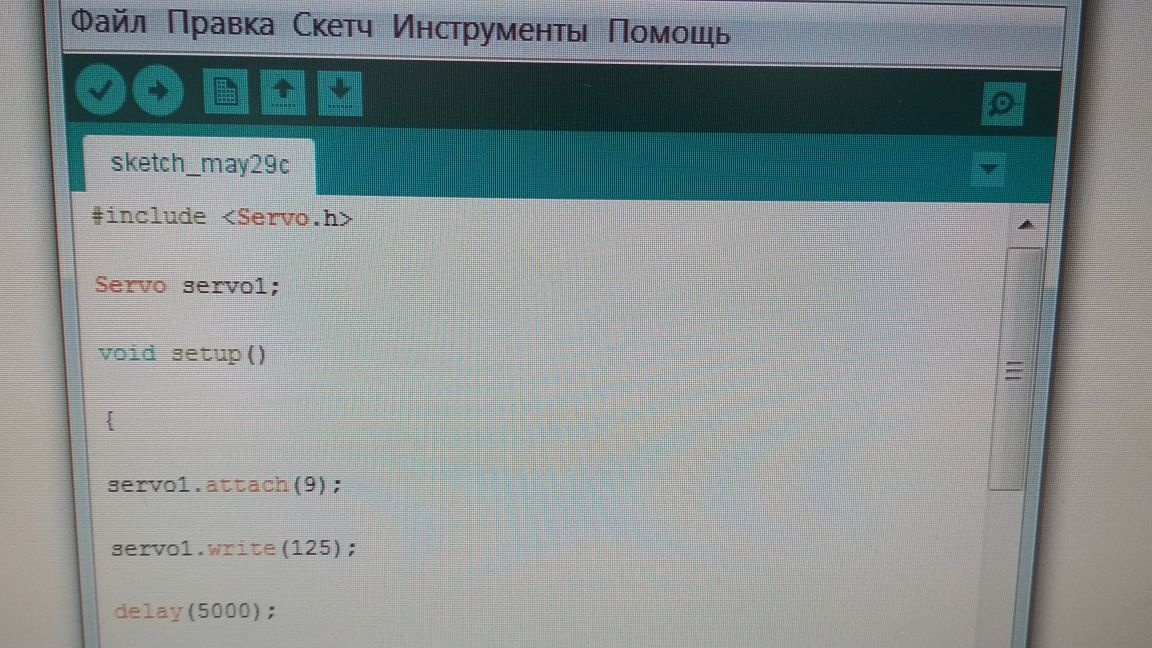
Hier ist eine Skizze:
#include
Servo servo1;
void setup ()
{
servo1.attach (9);
servo1.write (125);
Verzögerung (5000);
servo1.write (90);
Verzögerung (200);
servo1.write (125);
Verzögerung (750);
}}
void loop ()
{
servo1.write (90); // 1
Verzögerung (200);
servo1.write (125);
Verzögerung (600);
}}Mit Klebeband oder Isolierband wickeln wir die abisolierte Seite eines Drahtes vom Typ "Mutter zu Mutter" mit einem abgeschnittenen "Mutter" -Ausgang auf die Plus-Seite unseres "Stifts" und geben diesen Draht an Gnd auf Arduino aus:
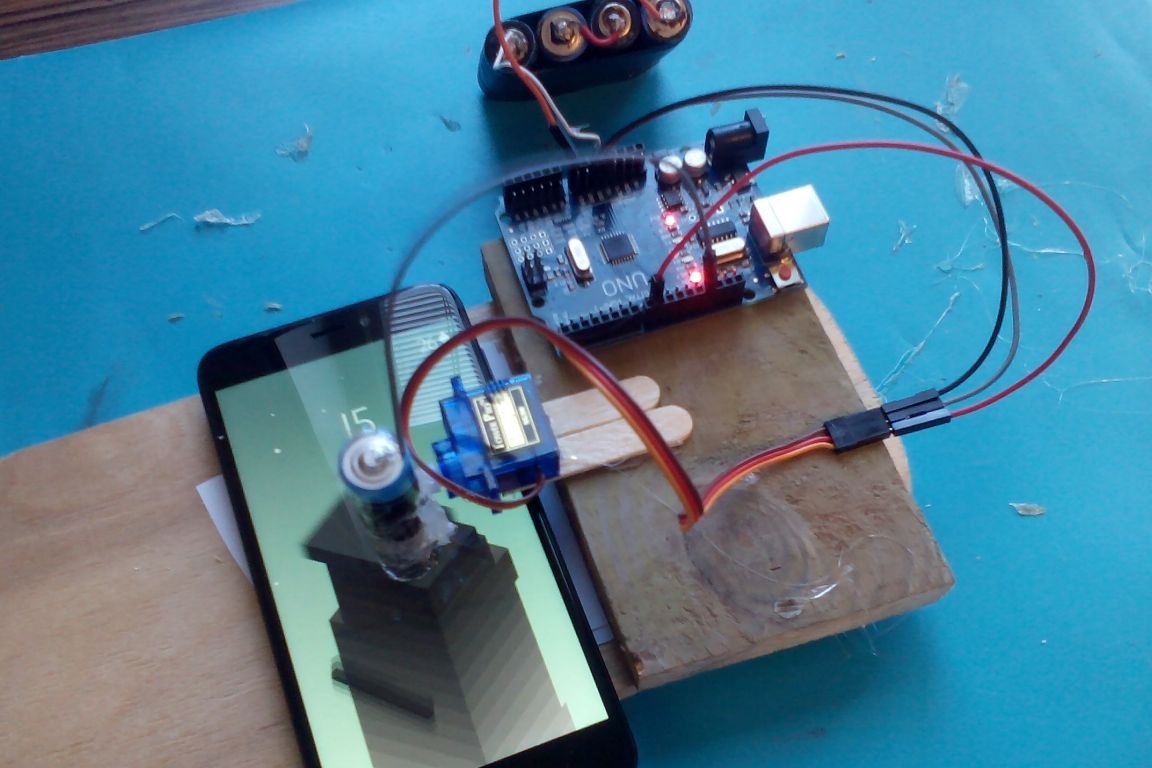
Nun, das ist es! Unser einfaches der Roboter bereit und es bleibt nur zu testen! Legen Sie dazu das Telefon unter den Stift, starten Sie die Stak-Anwendung und platzieren Sie das Telefon so, dass es sich über der durch einen Pfeil gekennzeichneten Wiedergabetaste befindet. Wir verbinden das Arduino entweder mit Hilfe eines speziellen Adapters mit Strom oder geben das Plus von unserem „Akku“ an Uin auf Arduino und Minus aus zu gnd. Nach dem Anschließen der Stromversorgung beginnt unser Roboter sofort zu "spielen". Und obwohl unser Roboter aufgrund der Tatsache, dass ich keinen normalen Stift, sondern einen Akku verwendet habe, ziemlich oft nicht in das Tempo gekommen ist und ihn verpasst hat, hat er "lange gespielt". Wenn alles sehr genau gemacht wird, wird er im Allgemeinen abgespielt, bis das Telefon ausfällt.

Vielen Dank für Ihre Aufmerksamkeit!