

Guten Tag Liebhaber von Arduino! Als es im Internet hing, stieß ich auf einen ziemlich unterhaltsamen Artikel darüber, wie man eine Hand zu einem Manipulator macht, der die Bewegungen der Hand einer Person wiederholt, inspiriert von Einfachheit und Wirkung hausgemacht hausgemacht beschlossen, es zu sammeln. Ich habe auf der Alliekspress Biegesensoren für die Hand des Senders gefunden und bin ein wenig tot geworden. Eines lag im Bereich von 15 bis 20 US-Dollar. Es stellte sich heraus, dass 5 dieser Sensoren für nur eine Hand 75 bis 100 US-Dollar kosten und dies nur für die Sensoren! Nach einiger Zeit lernte ich, wie man solche Sensoren herstellt mit seinen eigenen HändenEs stellt sich als sehr einfach und billig heraus.
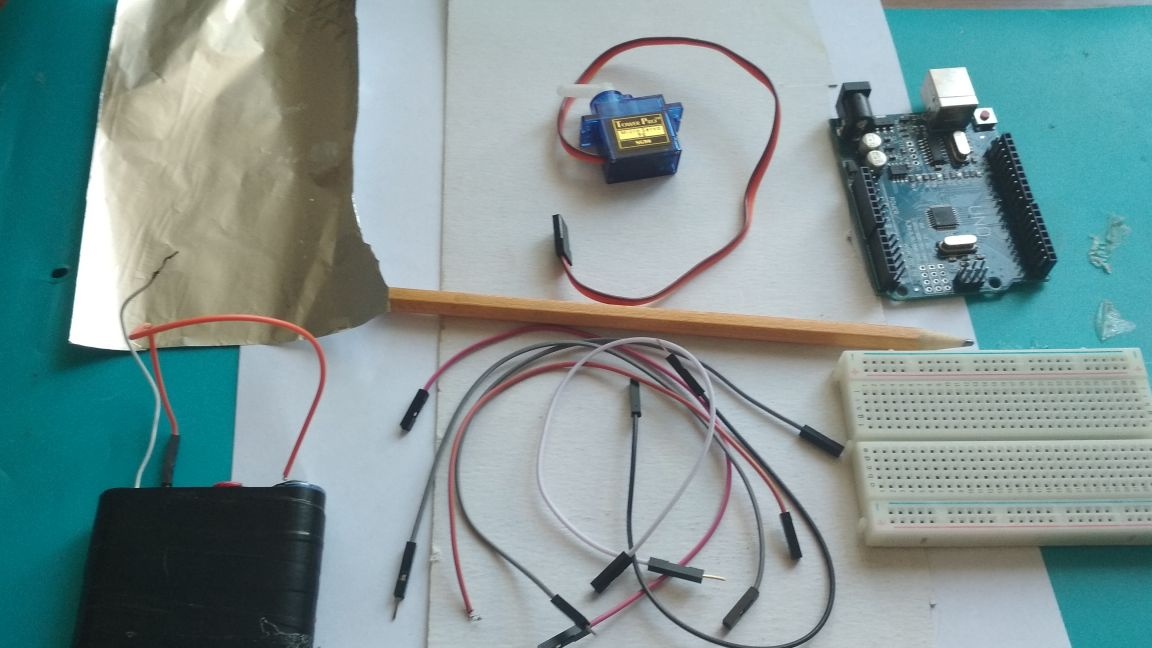
Und so brauchen wir für den Biegesensor:
Zahlung Arduino Uno ()
-Breadboard
- Verbindungsdrähte wie "Vater-Mutter" oder "Vater-Vater"
-Servomotor
Karton
Papier
Folie
Bleistift
- Stromversorgung von 6 bis 12 Volt (ich verwende 4 in Reihe geschaltete Batterien mit 1,5 V)
Von den Werkzeugen, die wir brauchen:
Klebepistole
Schere
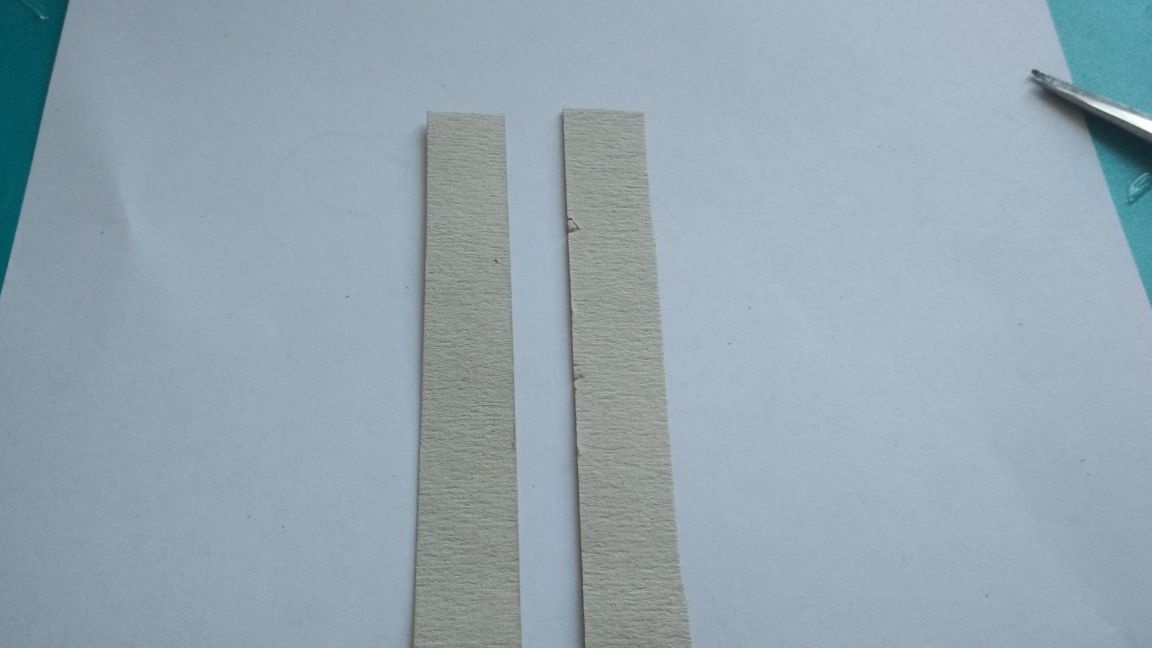
Das erste, was wir aus dem Karton herausschneiden, sind zwei Streifen, die 2 cm länger als Ihr Zeigefinger und etwa 1 cm breit sind:

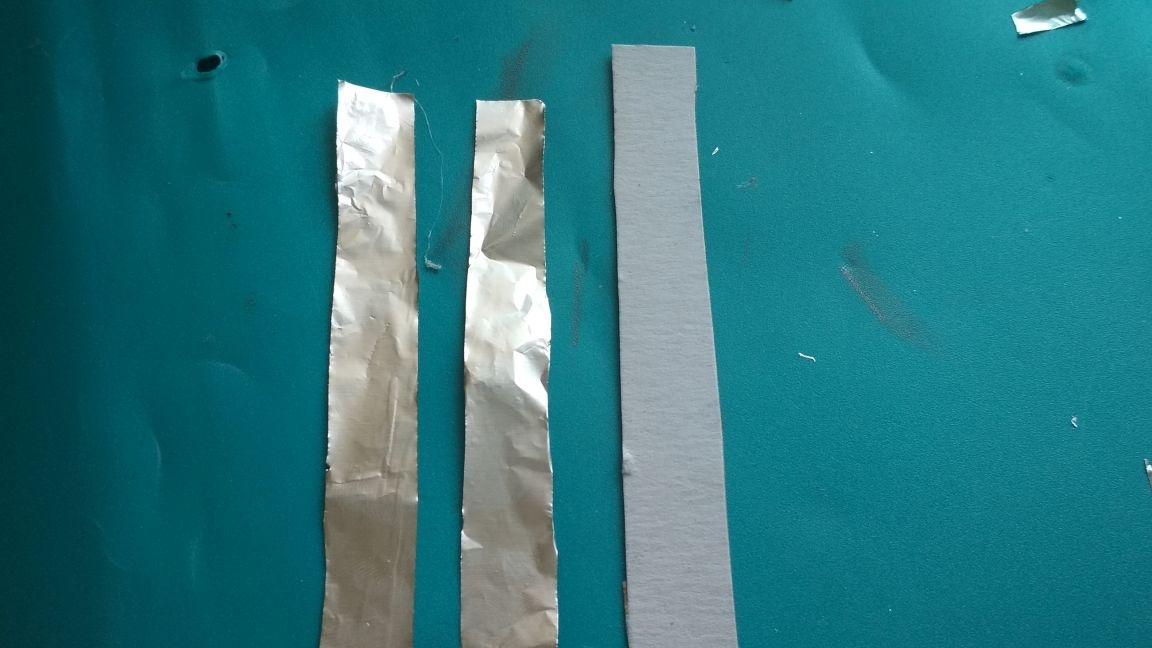
Schneiden Sie einen der gleichen Papierstreifen etwas weniger ab:

Bleistiftschatten auf beiden Seiten des Papierstreifens so gut wie möglich:


Schneiden Sie zwei Folienstreifen ab, die kleiner als Papier sind:
Kleben Sie sie wie auf dem Foto gezeigt auf die Kartonstreifen:

Von den Verbindungsdrähten "Vater-Mutter" schneiden wir den Ausgang "Mutter" ab und reinigen ihre Enden von der Isolierung:
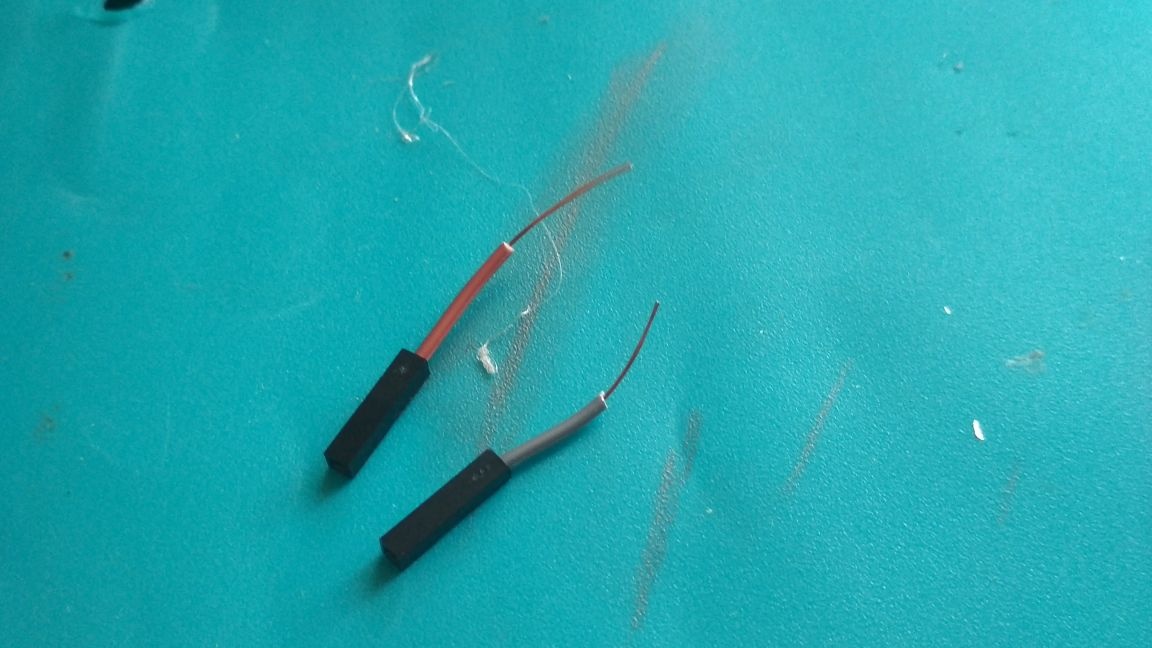
Wir befestigen von Klebeband oder Lot:

Wir befestigen einen Papierstreifen an einer der Hälften, so dass er mit der Folie in Kontakt kommt, bedecken dann mit der zweiten Hälfte die Seite mit der Folie, drücken und kleben an den Seiten:

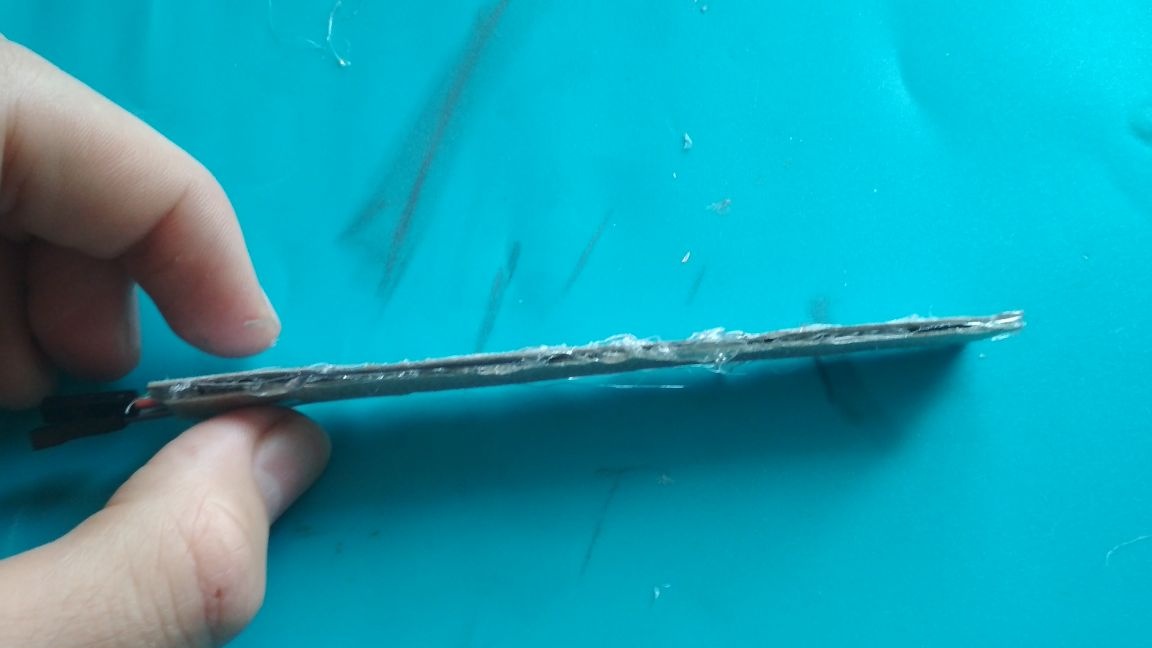

Wir stellen solche „Schlangen“ auf jeder Seite mit Hilfe von Heißkleber her, sie werden benötigt, damit das Design flexibler ist

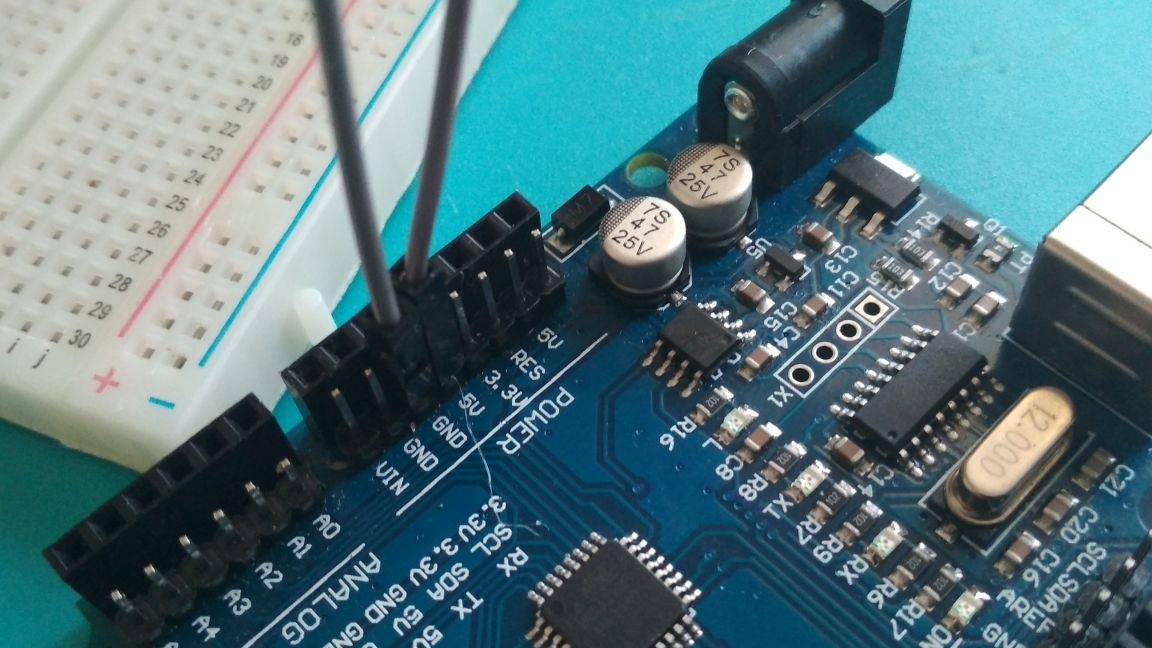
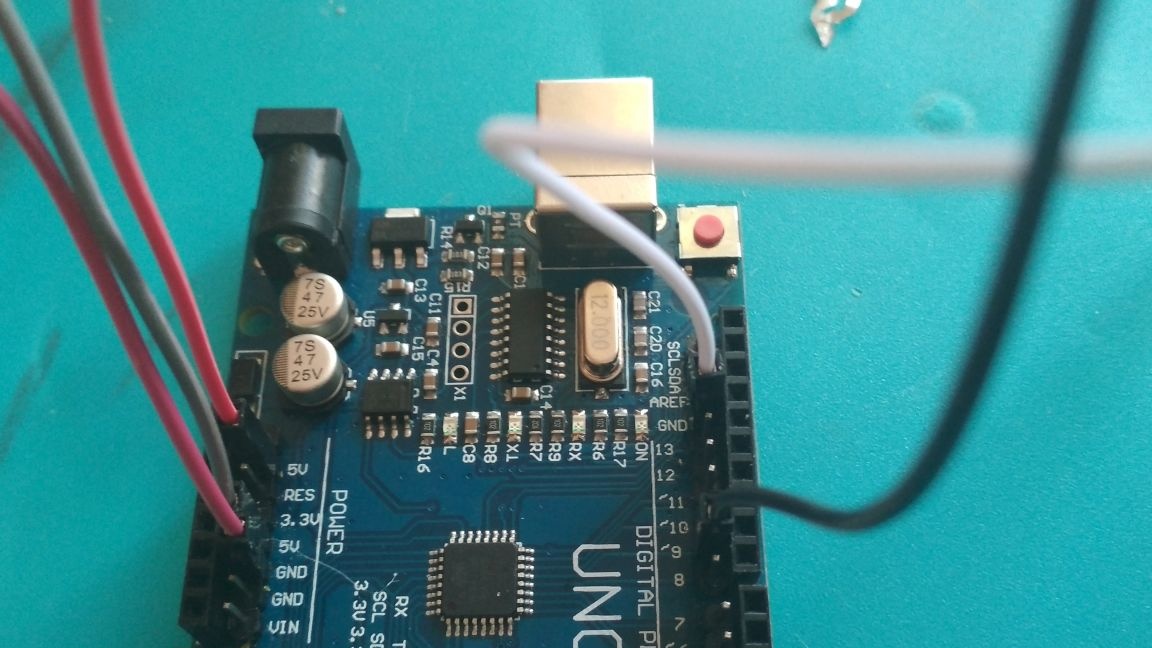
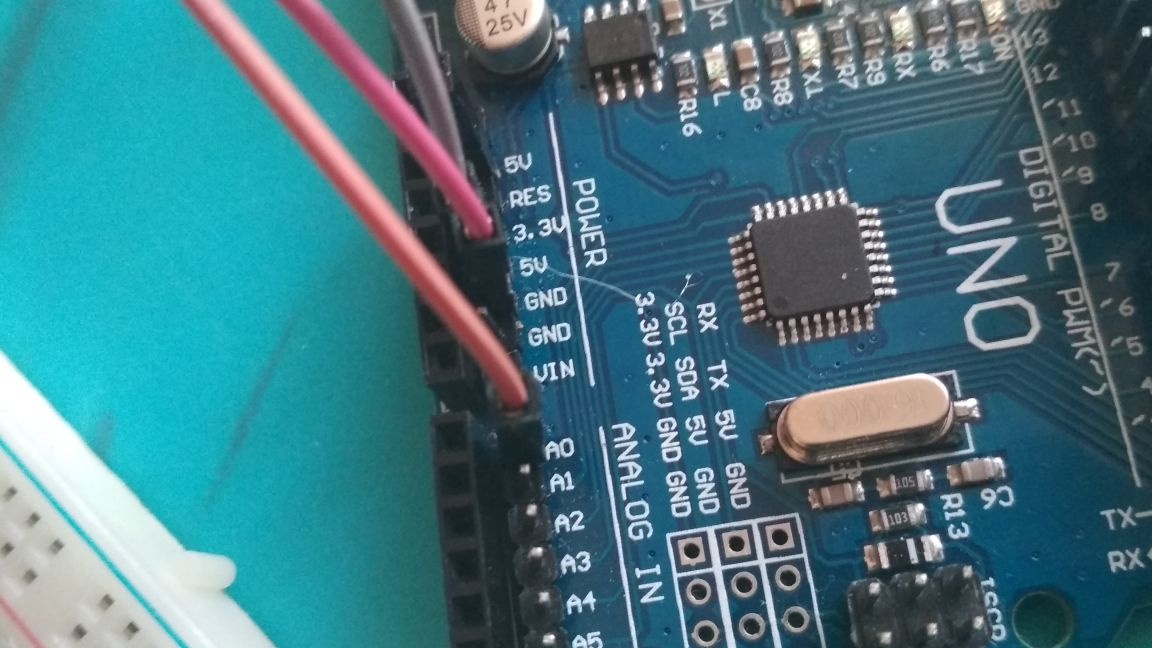
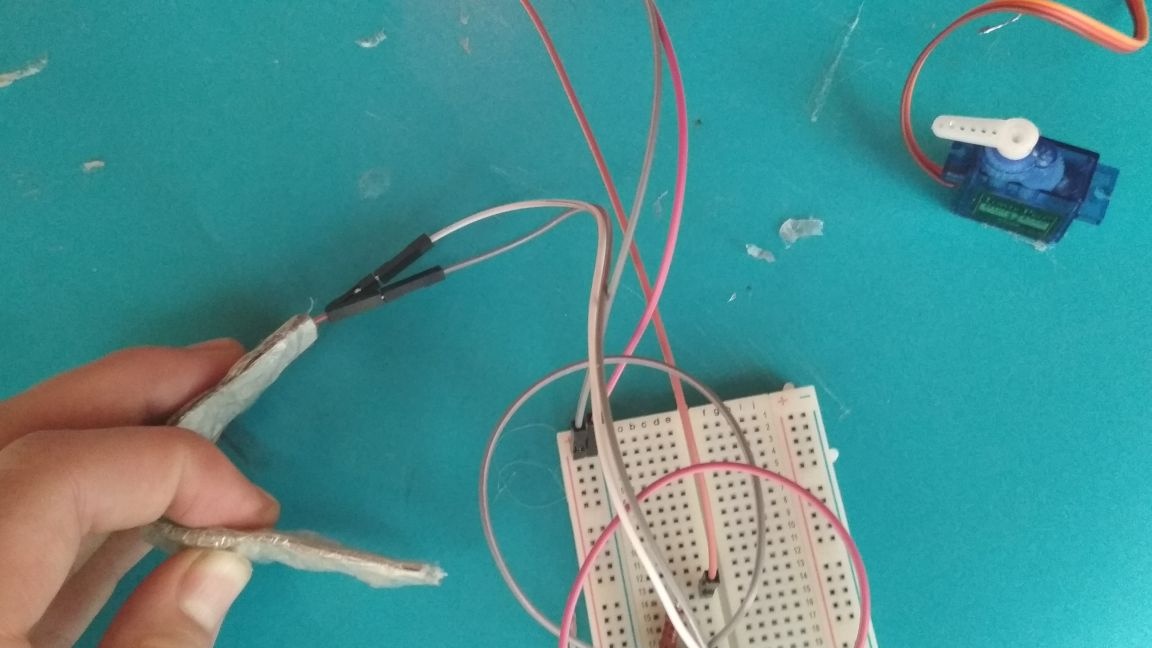
Wir nehmen ein Arduino und verbinden den 5-V-Ausgang mit dem Plus des Steckbretts und Gnd mit dem Minus:

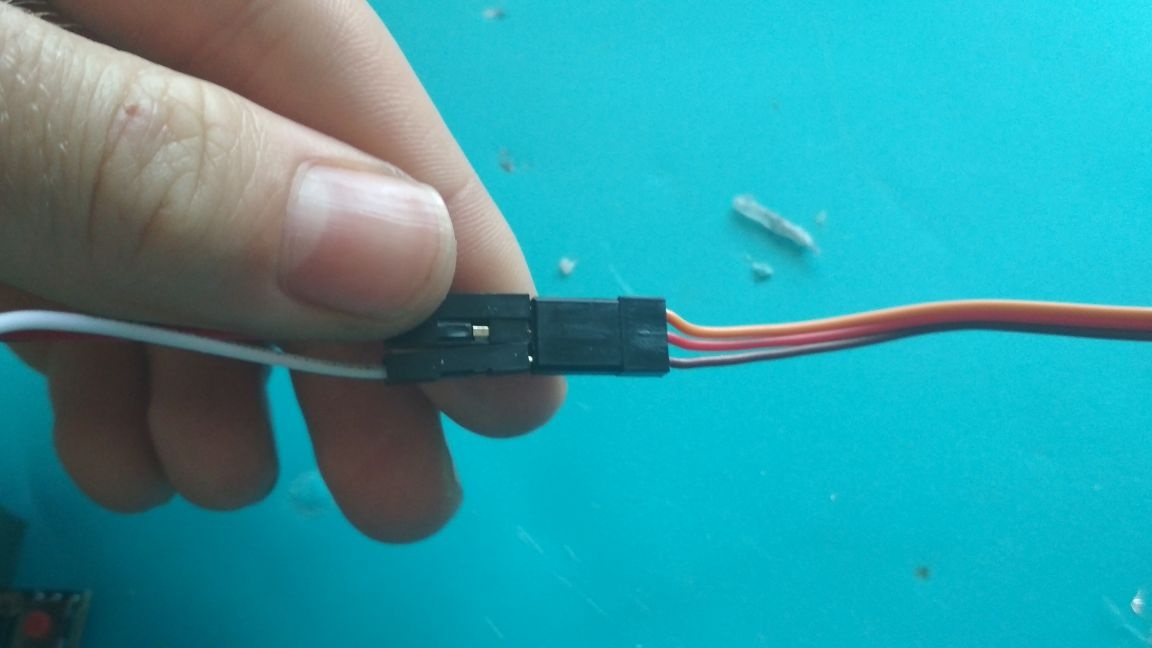
Fügen Sie dem Servomotor einen Verbindungsdraht hinzu und verbinden Sie ihn wie folgt mit dem Arduino:
Brauner Draht zu gnd
rot bis 5v
orange bis 9 Pin
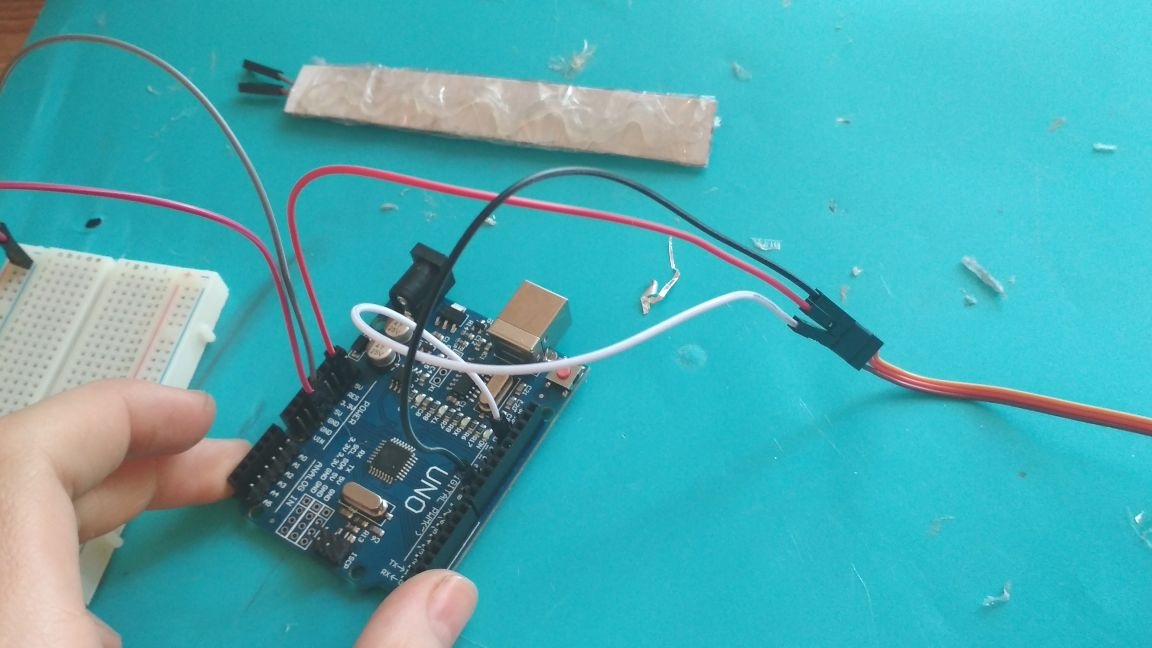
Fügen Sie unserem Biegesensor zwei Drähte von Vater zu Vater hinzu

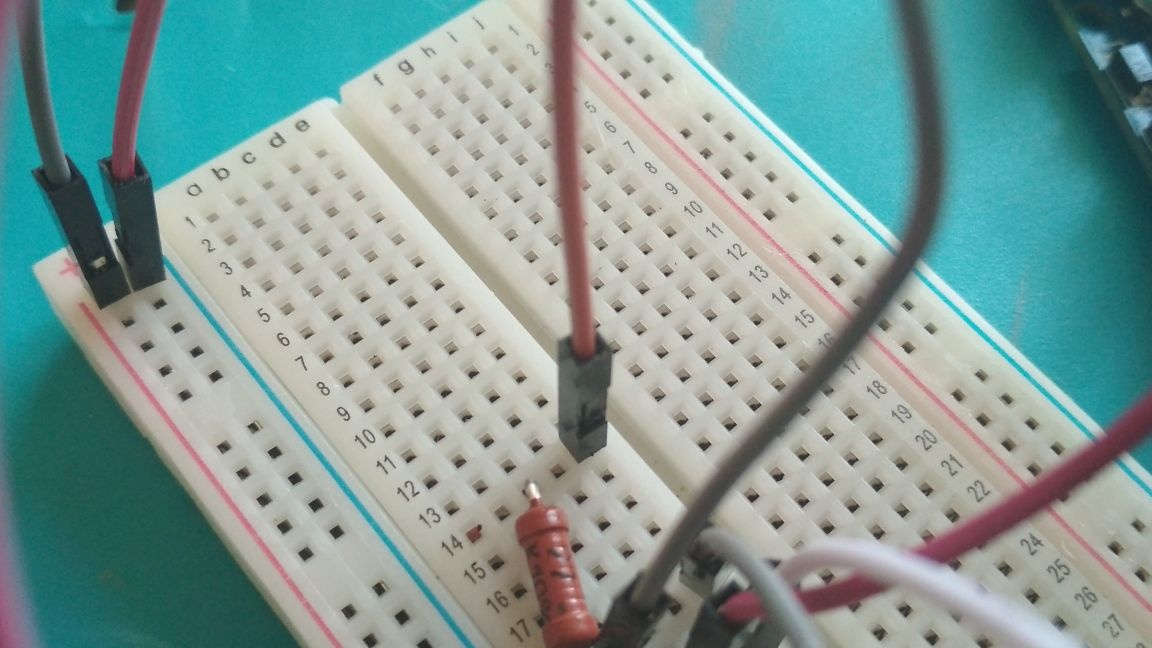
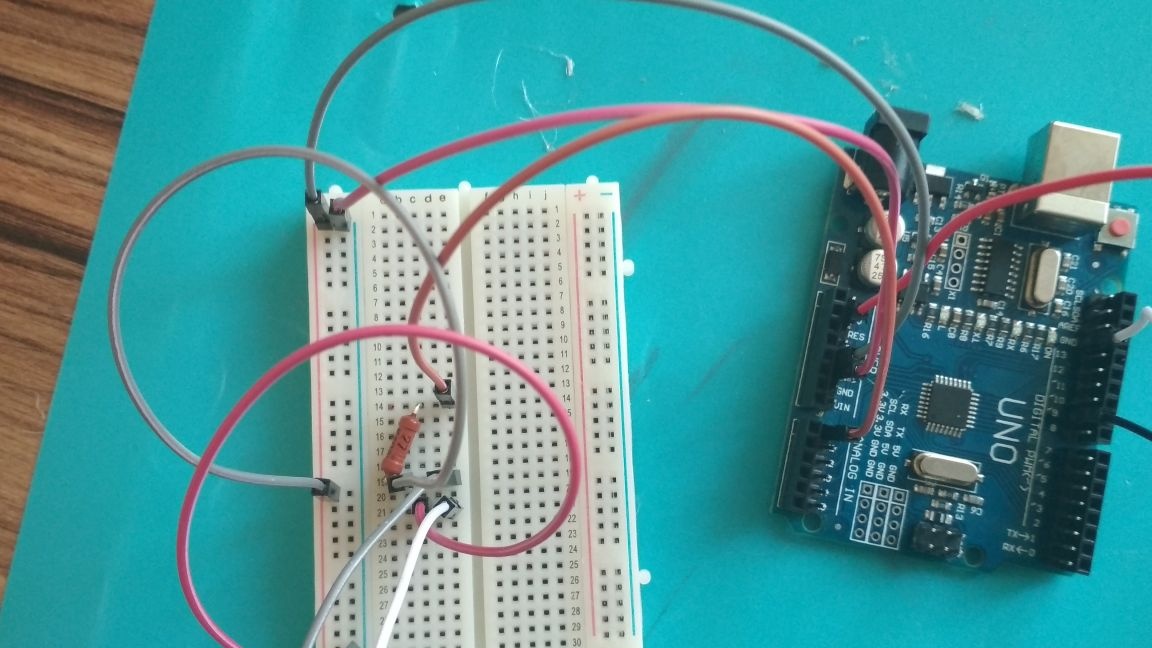
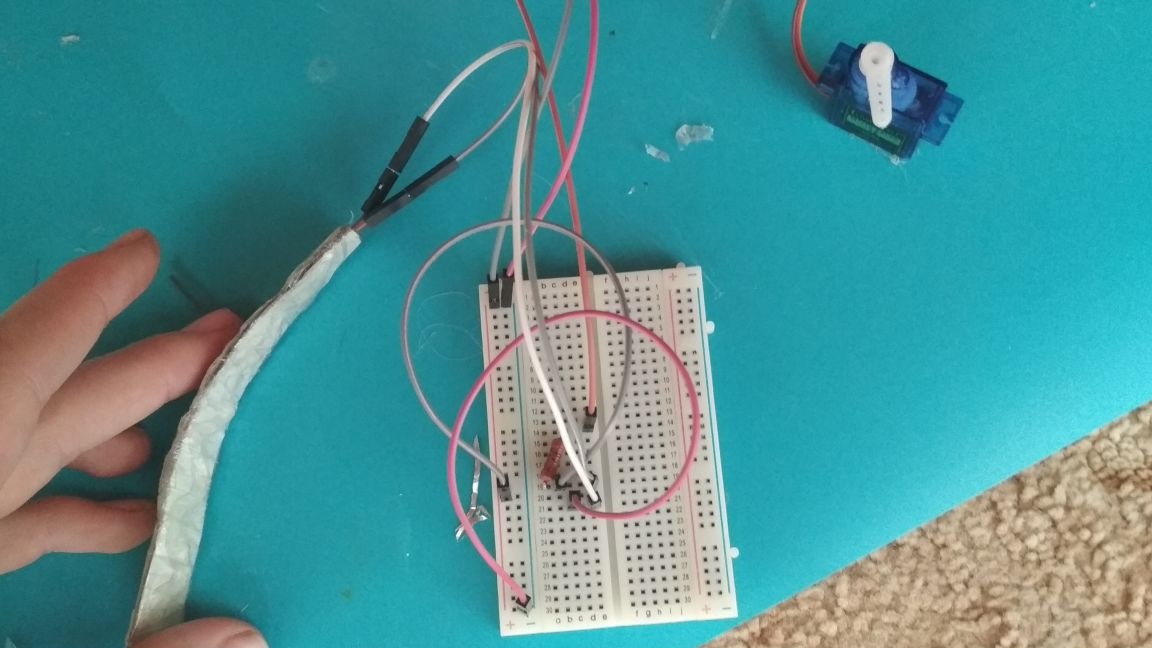
Verbinden Sie sie mit dem Steckbrett:
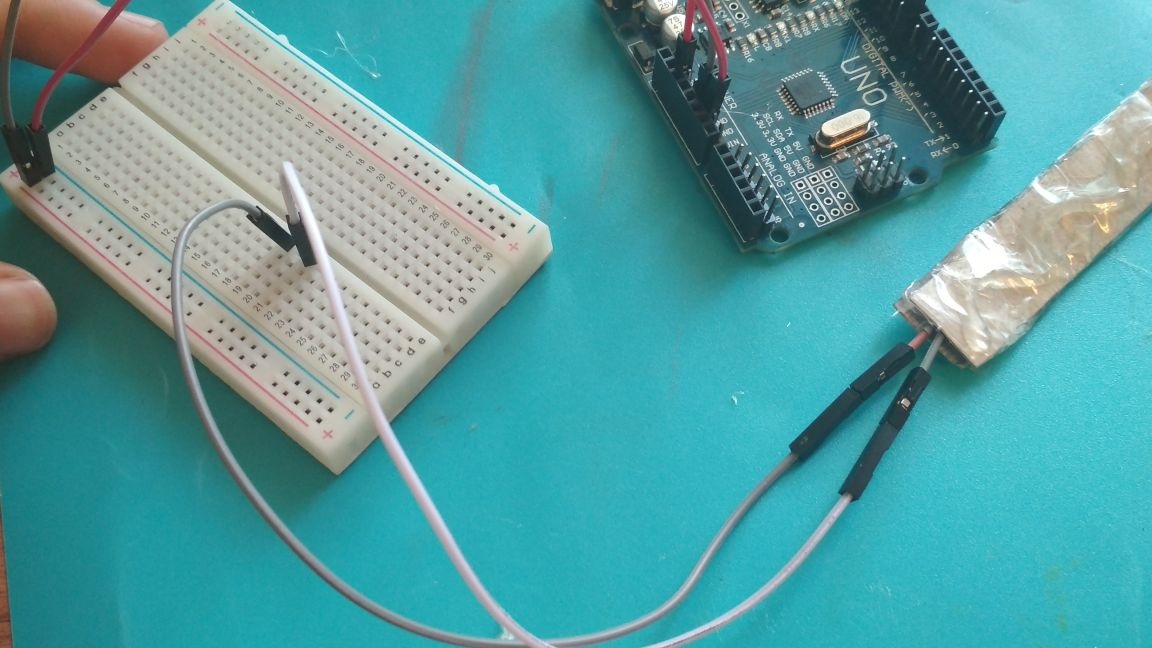
Eines der Enden des Sensors ist über einen 22-Kilo-Ohm-Widerstand mit dem Plus des Steckbretts verbunden (leider habe ich es verwechselt und an einen anderen Ausgang angeschlossen, aber dies hat nicht auf die Funktionsfähigkeit reagiert), und das andere mit dem Minus:
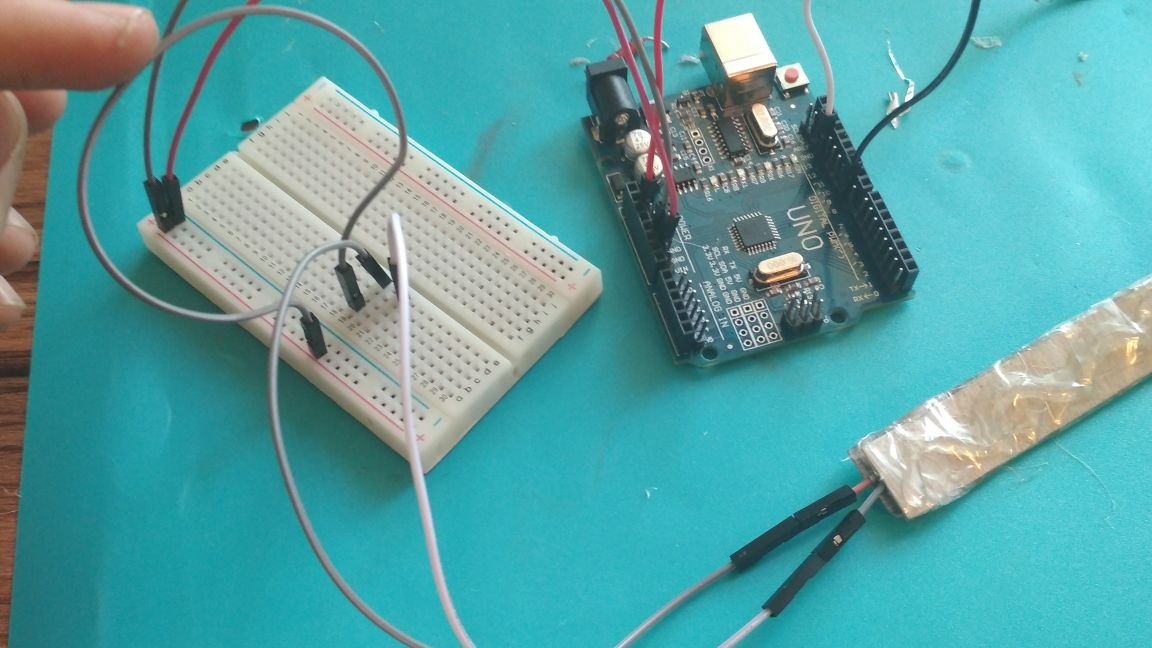
Fügen Sie auf der Breadboarda-Leitung, an der das Ende des Sensors mit dem Plus verbunden ist, einen weiteren Draht hinzu und geben Sie ihn an den Ausgang A0 von Arduino aus:
Jetzt verbinden wir Arduino mit dem Computer, starten die Arduino IDE und laden die folgende Skizze hinein:
#include
Servo servo1;
const int flexpin = 0;
void setup ()
{
Serial.begin (9600);
servo1.attach (9);
}}
void loop ()
{
int flexposition;
int servoposition;
flexposition = analogRead (flexpin);
Servoposition = Karte (Flexposition, 1018, 1023, 0, 90);
Servoposition = Einschränkung (Servoposition, 0, 90);
servo1.write (Servoposition);
Serial.print ("sensor:");
Serial.print (Flexposition);
Serial.print ("servo:");
Serial.println (Servoposition);
Verzögerung (1000);
}}Schalten Sie den Portmonitor ein, an den Arduino angeschlossen ist, und laden Sie die Skizze

Jetzt beobachten wir die Änderungen, die im Port-Monitor auftreten, wenn sich unser Sensor biegt. Wir sehen, dass 1023 90 Grad und 1020 und 1019 0 sind. In meinem Fall ändere ich also die Nummer 1018 in der Skizze in 1020, Sie können eine andere haben. Jetzt ist 1020 0 Grad und 1023 ist 90 Grad. Laden Sie nach allen Änderungen die neue angepasste Skizze auf das Arduino-Board hoch


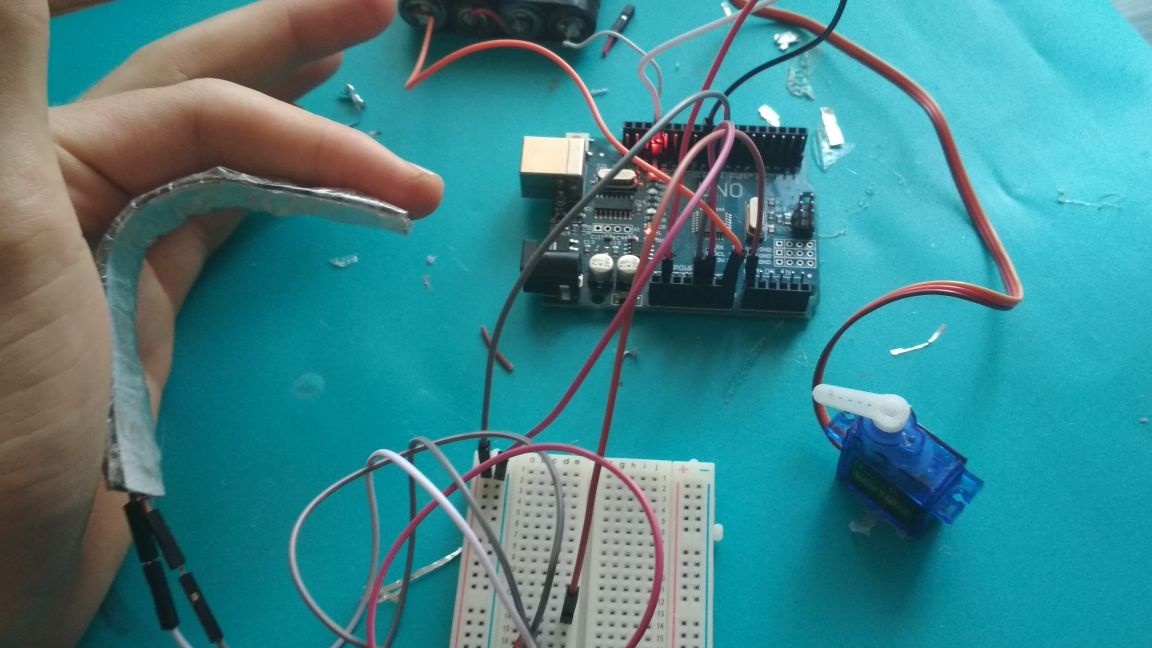
Nun, das ist es! Unser einfachster und vor allem billiger Biegesensor ist fertig!
Wenn alles richtig gemacht wurde, dreht sich der Servoantrieb beim Biegen des Sensors um 90 Grad, und wenn er ausgefahren ist, kehrt er in seine ursprüngliche Position zurück. Natürlich ist die Genauigkeit dieses Sensors schlechter als die des gekauften, aber er eignet sich für Projekte, die nicht besonders verwirrt sind. Wenn Sie alles sorgfältig ausführen und fein abstimmen, wird er fast wie gekauft ausfallen. Ich hoffe, dieser Artikel ist für jemanden nützlich.
Vielen Dank für Ihre Aufmerksamkeit!