Heute möchte ich mein nächstes teilen hausgemacht. Es basiert auf Lego und Arduino. Zur Steuerung verwenden wir eine Fernbedienung mit einem 433-MHz-Sender. Diesmal wollte ich ein Rennen machen ein Auto. Weiter:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- 433 MHz Funkkommunikationsmodul
- Untersetzungsgetriebe 200 U / min mit einem Wellendurchmesser von 3 mm
- 2 LEDs
- 2 Widerstände 150 Ohm
- Kondensator 10v 1000uF
- 2 einreihige Kämme PLS-40
- 2 PBS-20-Anschlüsse
- Induktor 68mkGn
- 6 NI-Mn 1,2 V 1000 mA-Batterien
- Stecker Papa-Mama zwei Pin zum Draht
- Homutik
- Drähte in verschiedenen Farben
- löten
- Kolophonium
- Lötkolben
- Schrauben 3x40 und Muttern und Unterlegscheiben für sie
- Schrauben 3x20
Schritt 1 montieren Sie den Fall.
Es ist notwendig, unsere Maschine gemäß den Lego-Anweisungen 42022 der zweiten Option mit etwas Verfeinerung zusammenzubauen. Wir führen alle Aktionen von Seite 3 bis 6 durch. Wir brauchen kein Getriebe. Der Lego-Motor muss ebenfalls nicht zusammengebaut werden. Sie benötigen jedoch Motorlager, die auf den Seiten 14 bis 19 aufgeführt sind, mit Ausnahme von Zahnrädern und Wellen. Als nächstes sammeln wir alles von den Seiten 20 bis 74, mit Ausnahme des Hebels auf Seite 25.
Schritt 2 mechanisiert den Körper.
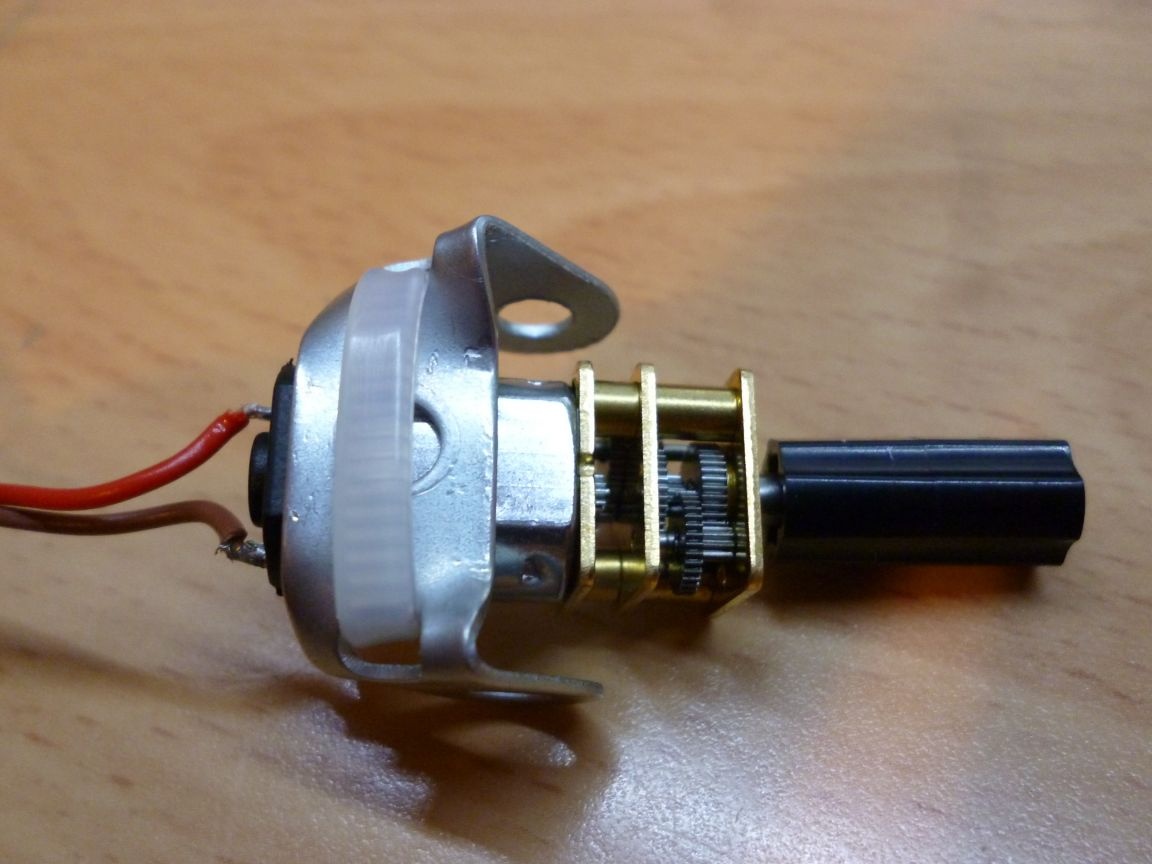
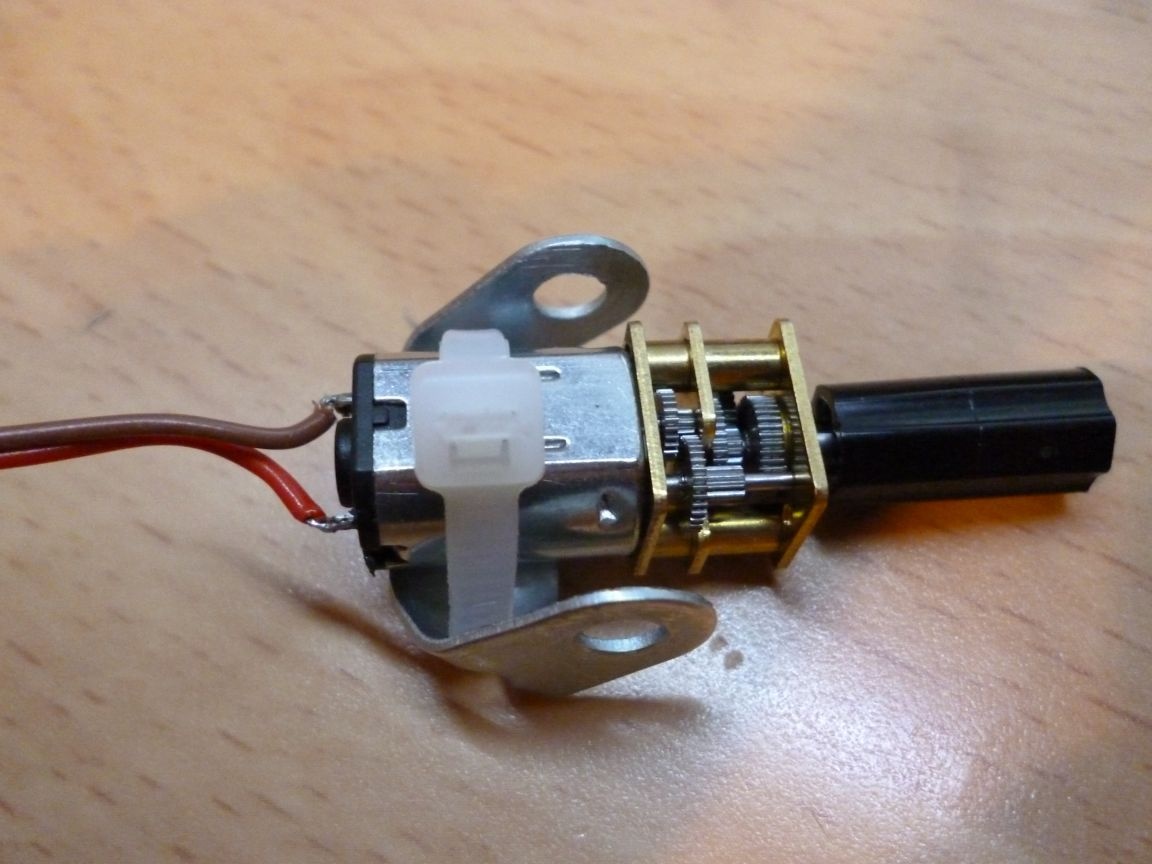
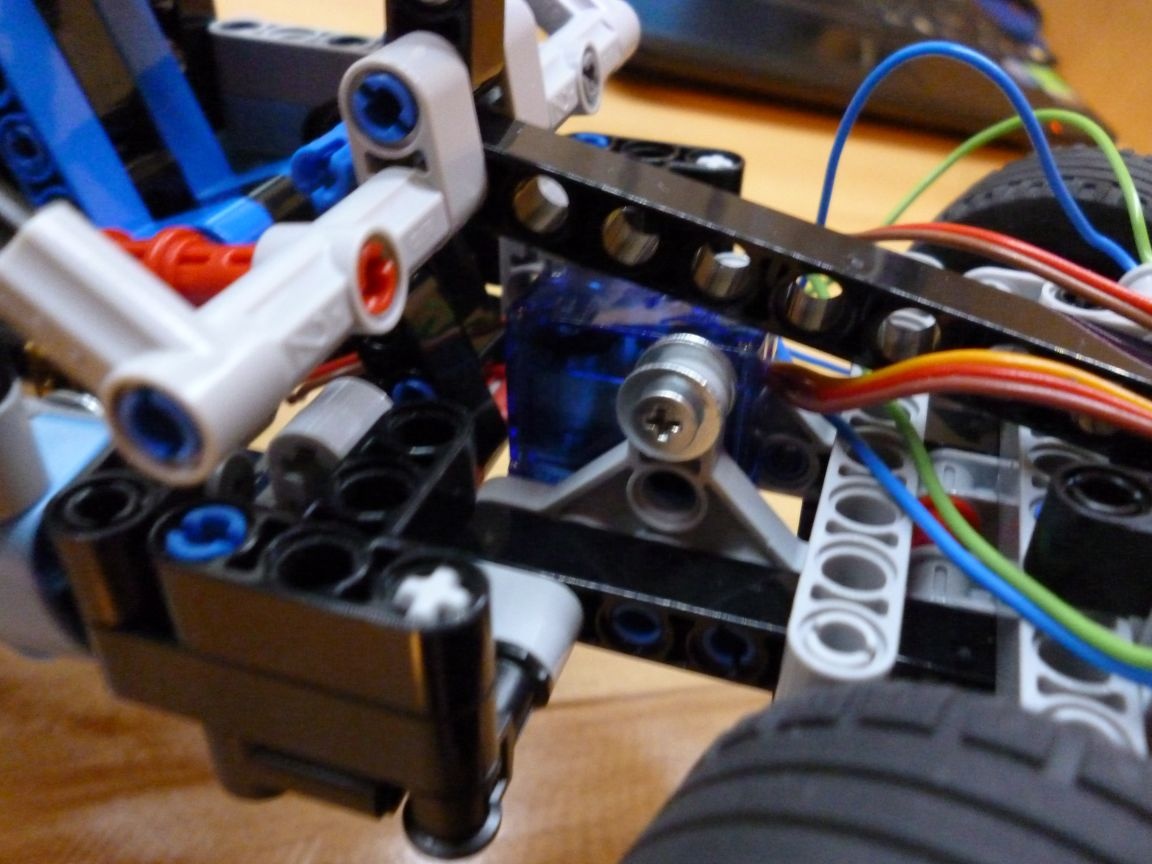
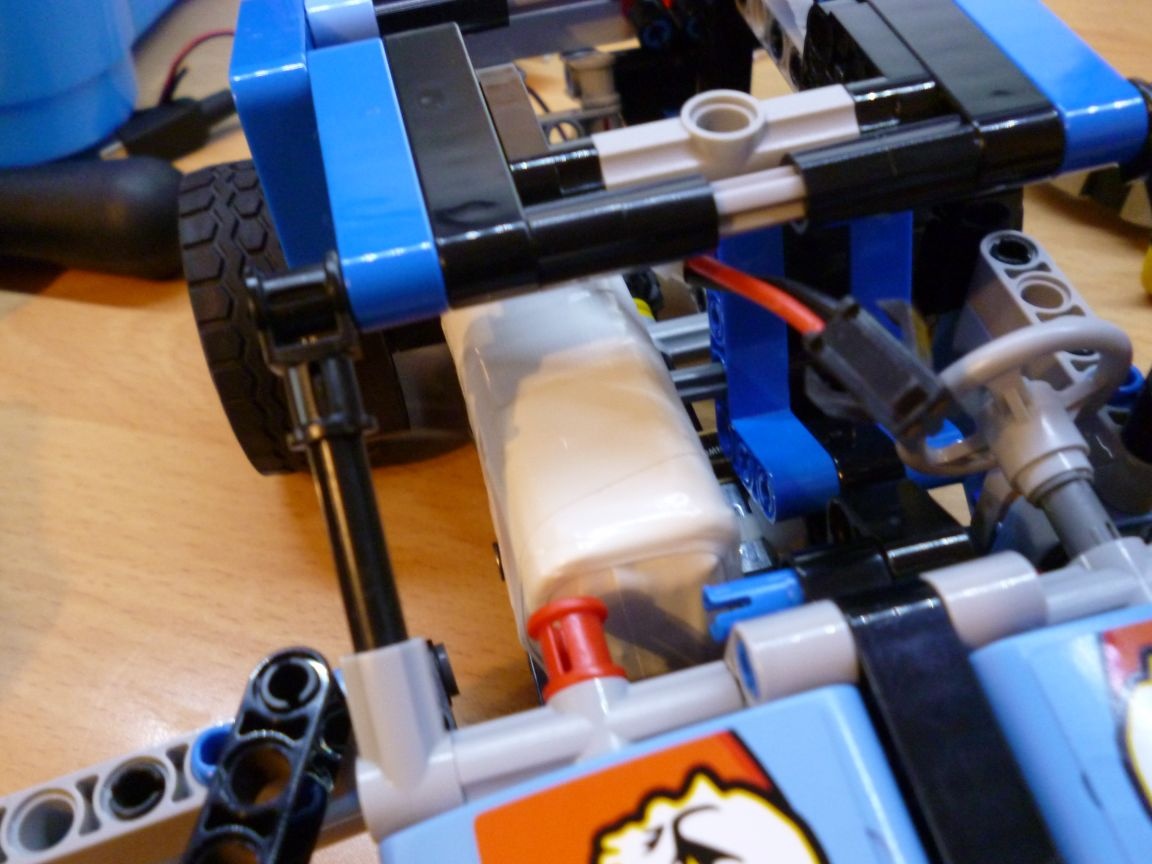
Setzen Sie unsere in Bewegung das Modell Es wird einen Getriebemotor mit einer Drehzahl von 200 U / min geben. Kann mit einem anderen Übersetzungsverhältnis verwendet werden. Aber meiner Meinung nach ist dies die beste Option. Bei 100 U / min - zu langsam, 300 U / min - ist nicht genügend Leistung vorhanden und der Motor ist sehr heiß. Setzen Sie auf der Welle des Getriebemotors die Verbindungshülse „Legovskaya“ auf und sichern Sie sie mit einer Zierleiste gegen Verdrehen des Streichholzes. Um unseren Motor am Modell zu befestigen, muss das Teil vom Metallbauer mit dem Buchstaben „P“ gebogen und der Getriebemotor mit einer Klemme an der Platte befestigt werden. Das Ergebnis sollte folgendes sein:
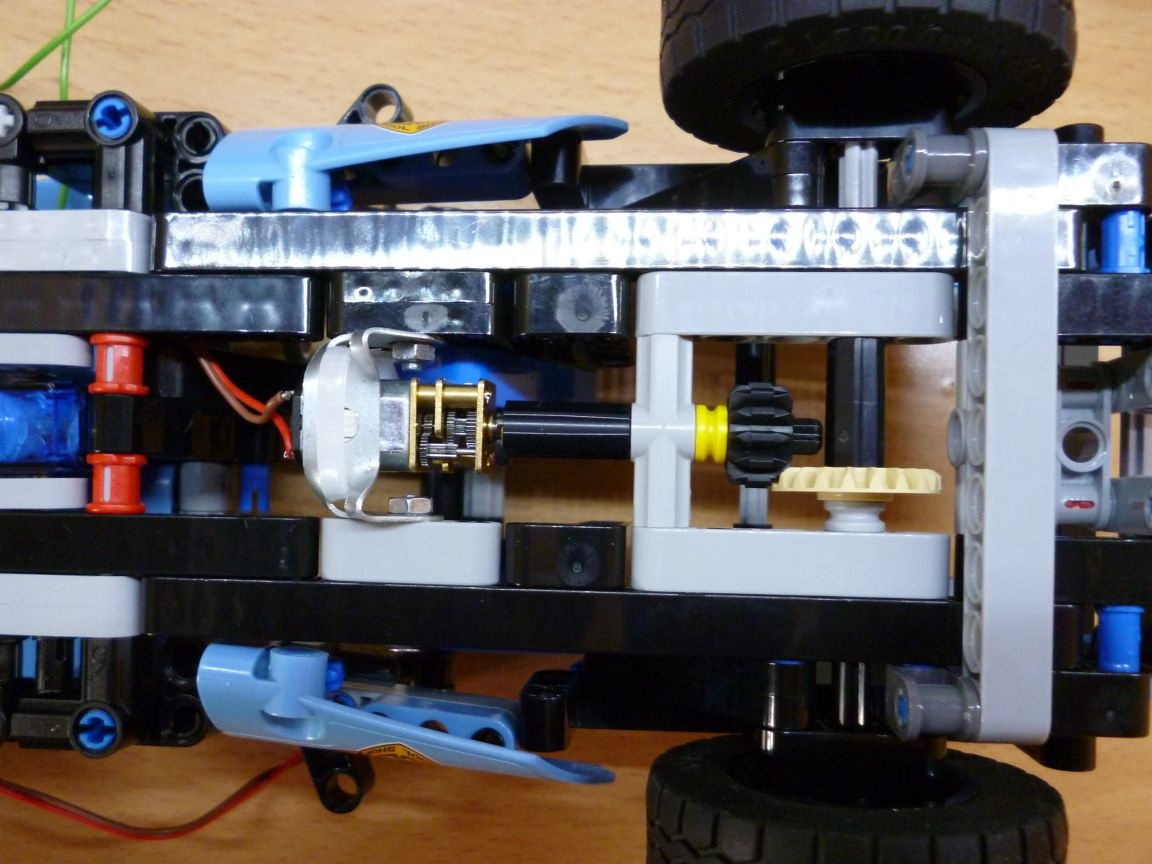
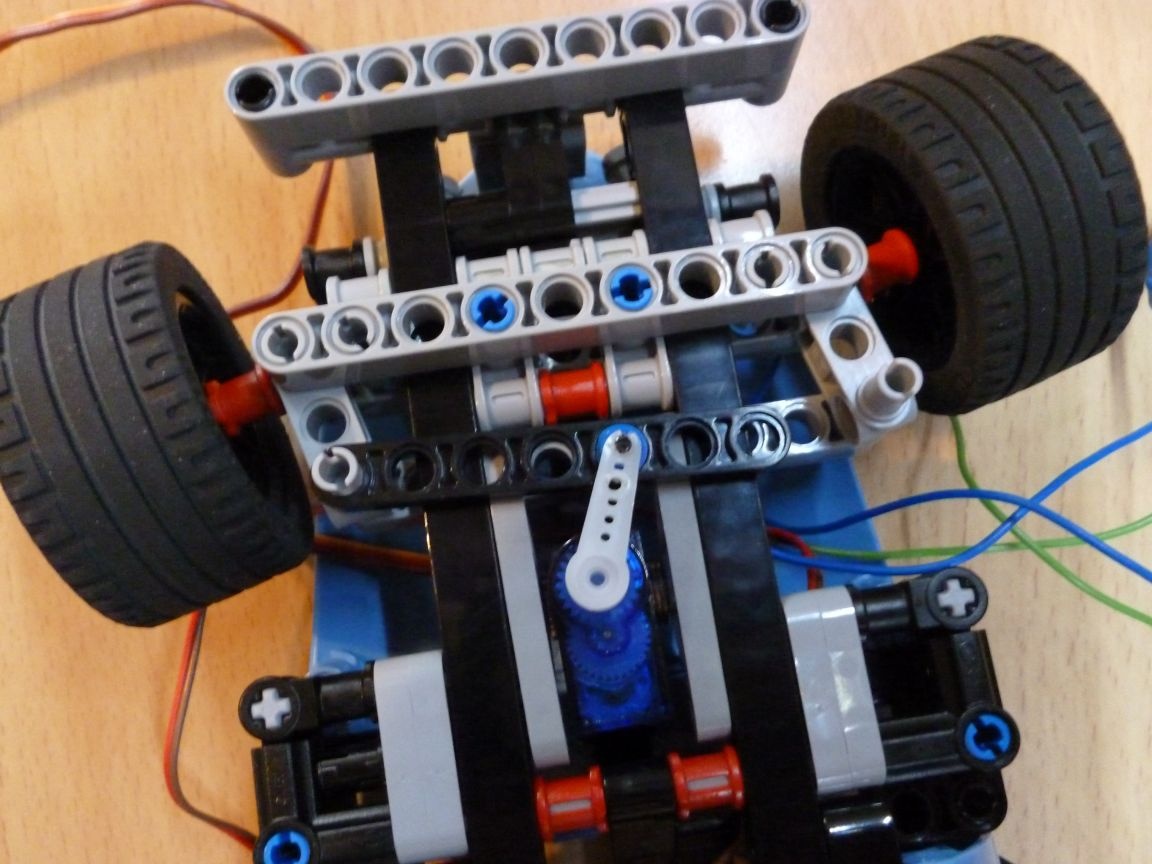
Mit Hilfe von 3x20 Schrauben befestigen wir unseren Motor am Modell. Nicht zu fest anziehen! Andernfalls können Sie Lego-Konstruktorteile beschädigen. Auf dem Modell sieht es so aus:
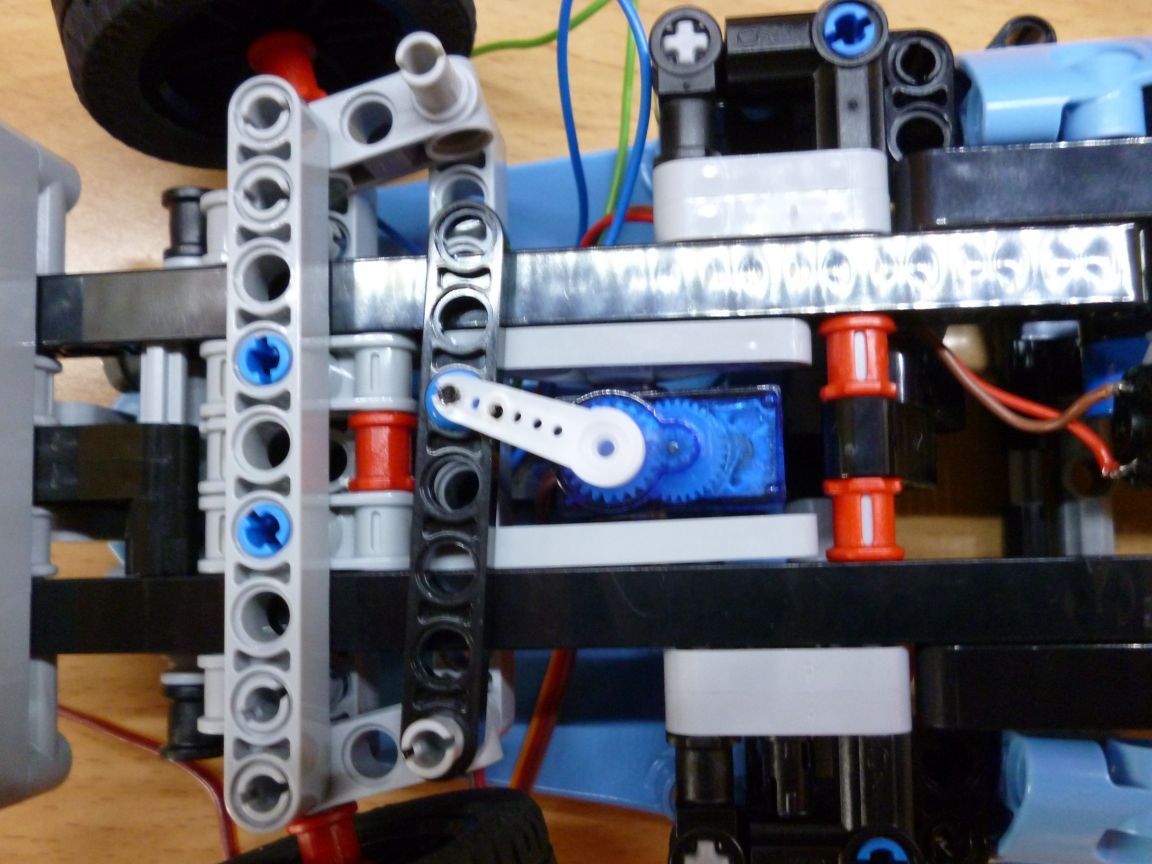
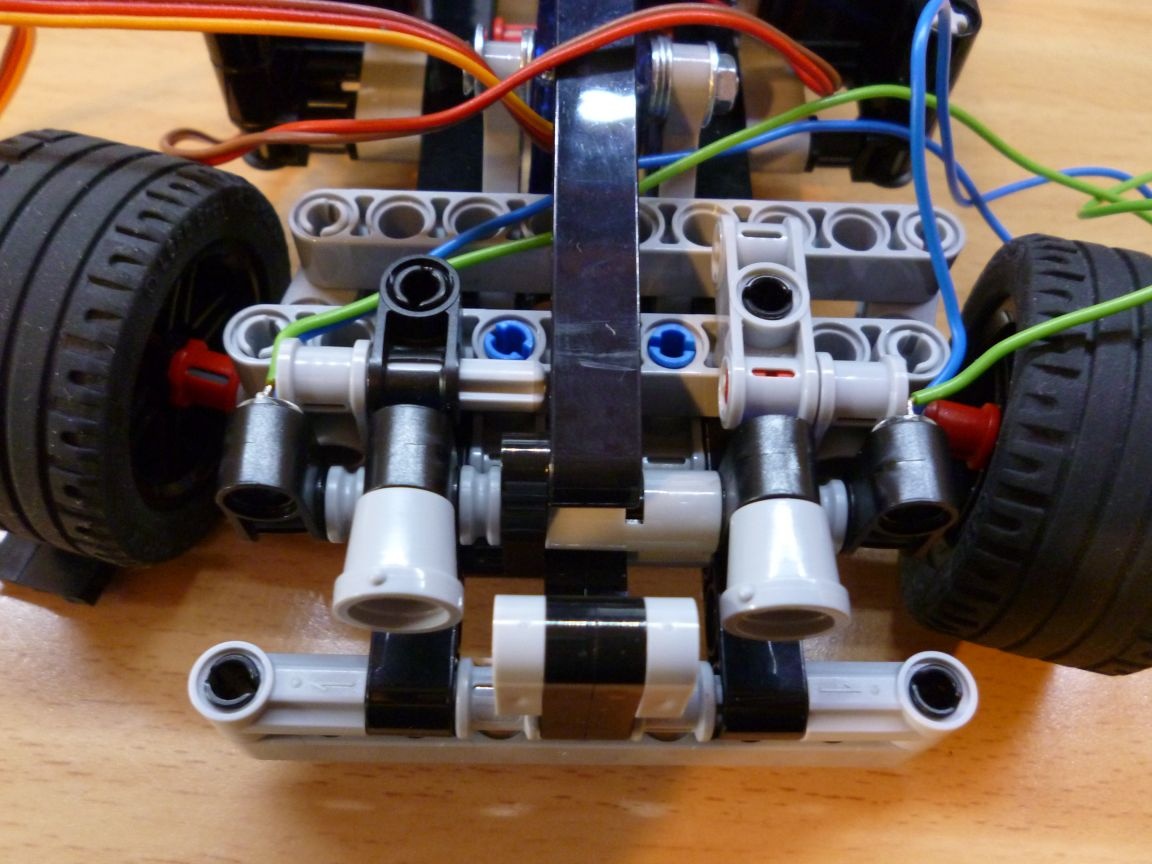
Um die Kurve zu machen, nehmen Sie ein leicht modifiziertes Servo SG-90. Das Gehäuse muss sorgfältig gebohrt werden, um die Innenteile, das Durchgangsloch mit einem Durchmesser von 3,2 mm, nicht zu berühren, oder einfach mit einem Schreibwarenmesser geschnitten werden.

Wir setzen einen Bolzen in das Loch ein und setzen an den Kanten dreieckige Platten auf und befestigen sie mit Muttern. Wir setzen den Hebel auf die Servowelle und befestigen das Teil am Lego-Hebel. Auf einer Schreibmaschine sieht es so aus:
Schritt 3 ist ein Elektriker.
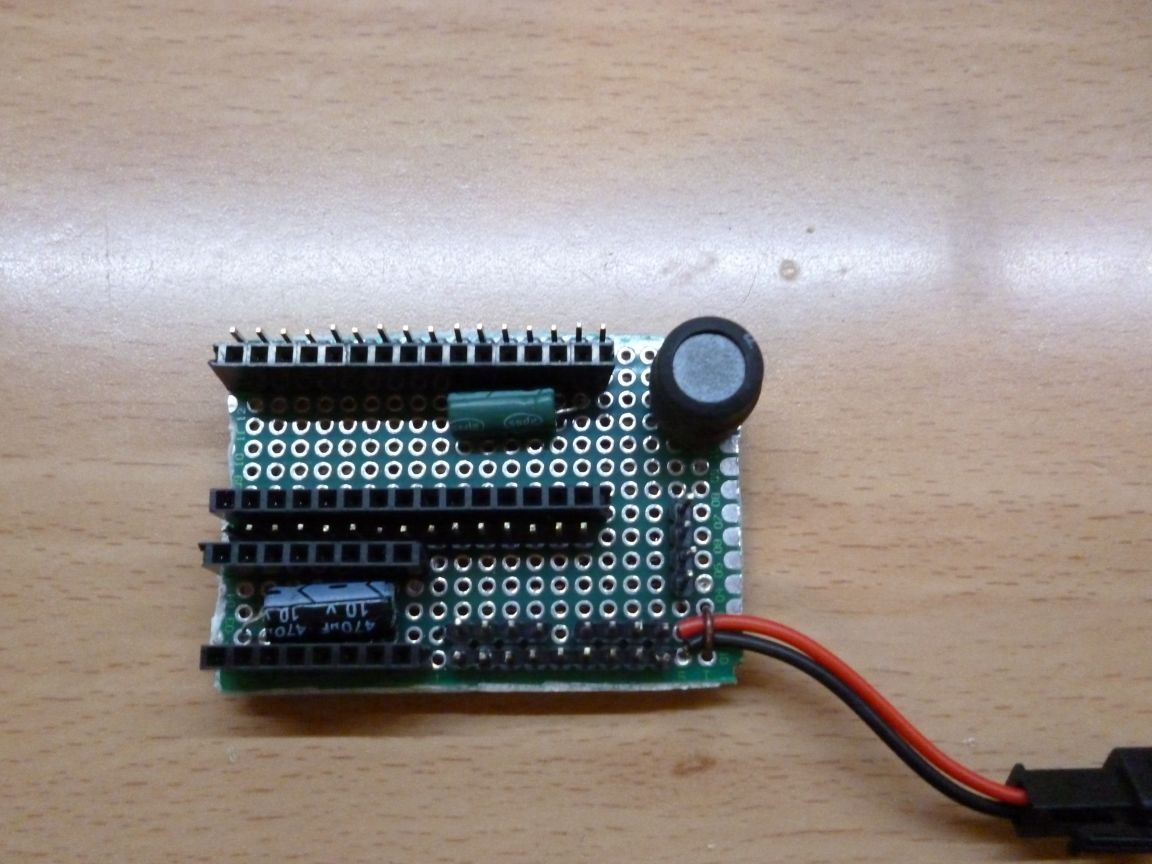
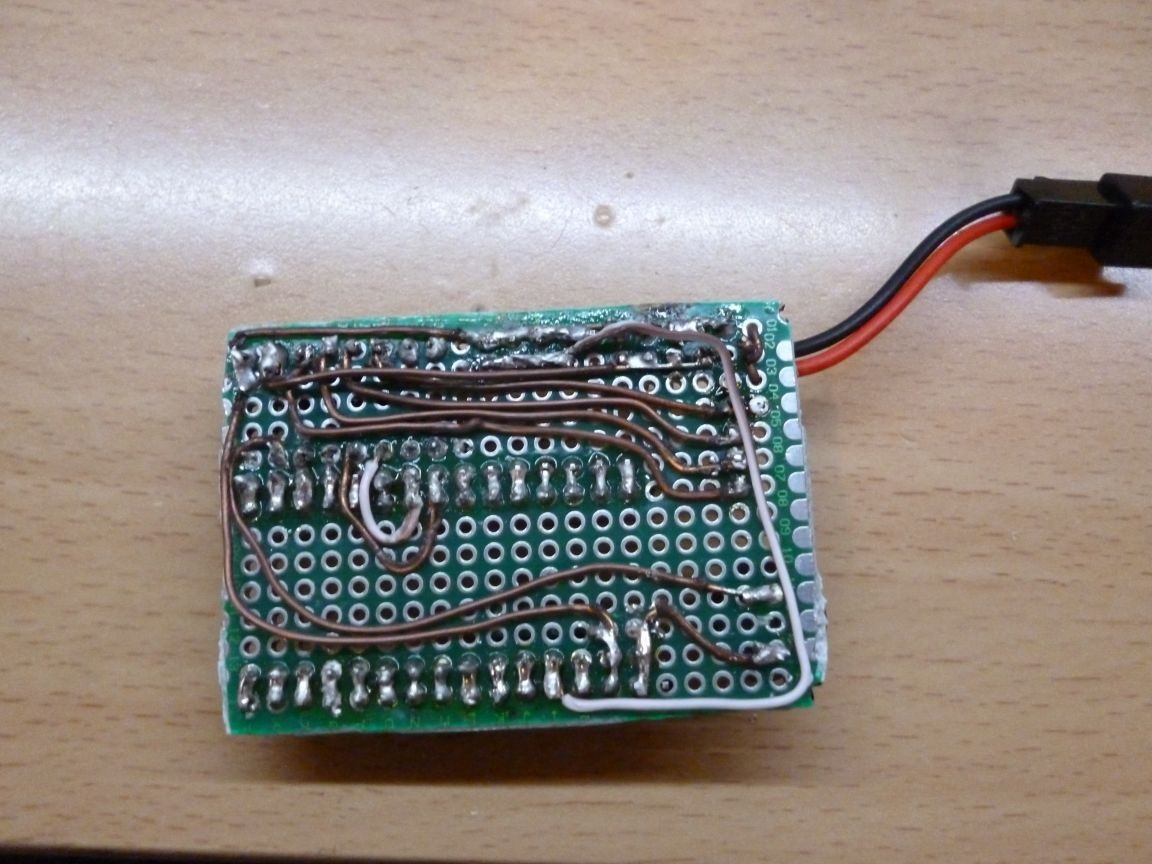
Lötkolben in der Hand und los. Die gesamte Elektrik kann einfach durch Anschließen der Befestigungsdrähte zusammengebaut werden. Dies ist jedoch unpraktisch, da es viel Platz benötigt. Darüber hinaus besteht eine hohe Wahrscheinlichkeit für Kontakte von schlechter Qualität. Daher ist es besser, alles auf der Leiterplatte nach folgendem Schema zu löten:
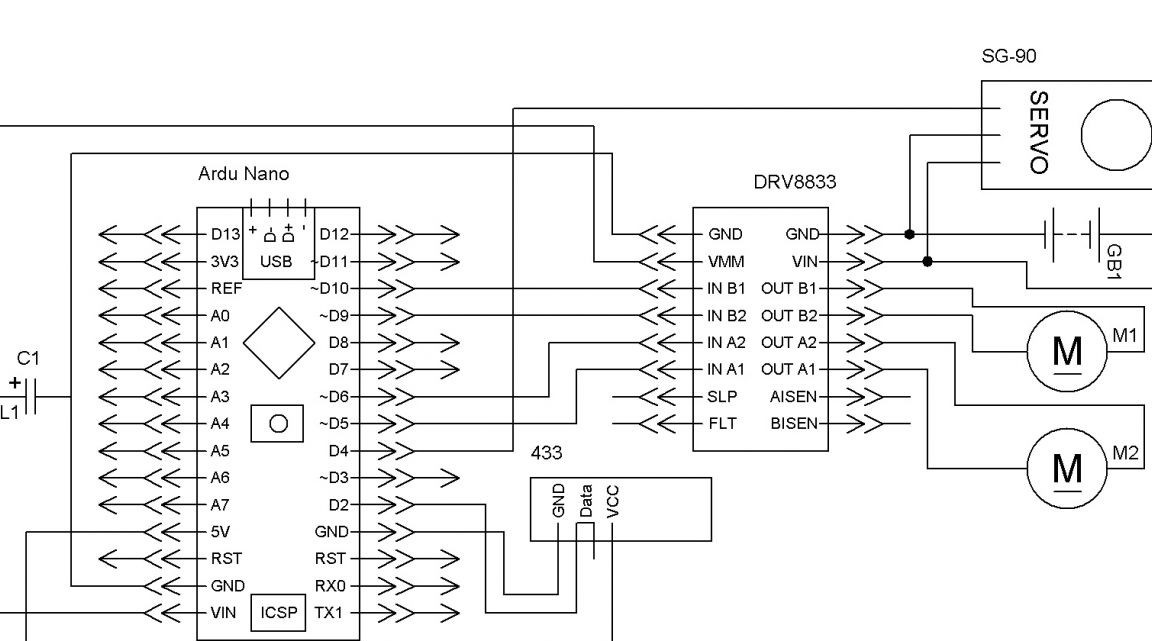
Ich bringe ein wenig Klarheit: Sie können jeden Kondensator mit geringem Stromverbrauch nehmen, Sie können auch einen Induktor jeglicher Art finden, dies ist notwendig, um die Spannung des Mikrocontrollers zu stabilisieren. Die Antenne muss mit dem Empfänger verlötet werden. Ich habe folgendes bekommen:
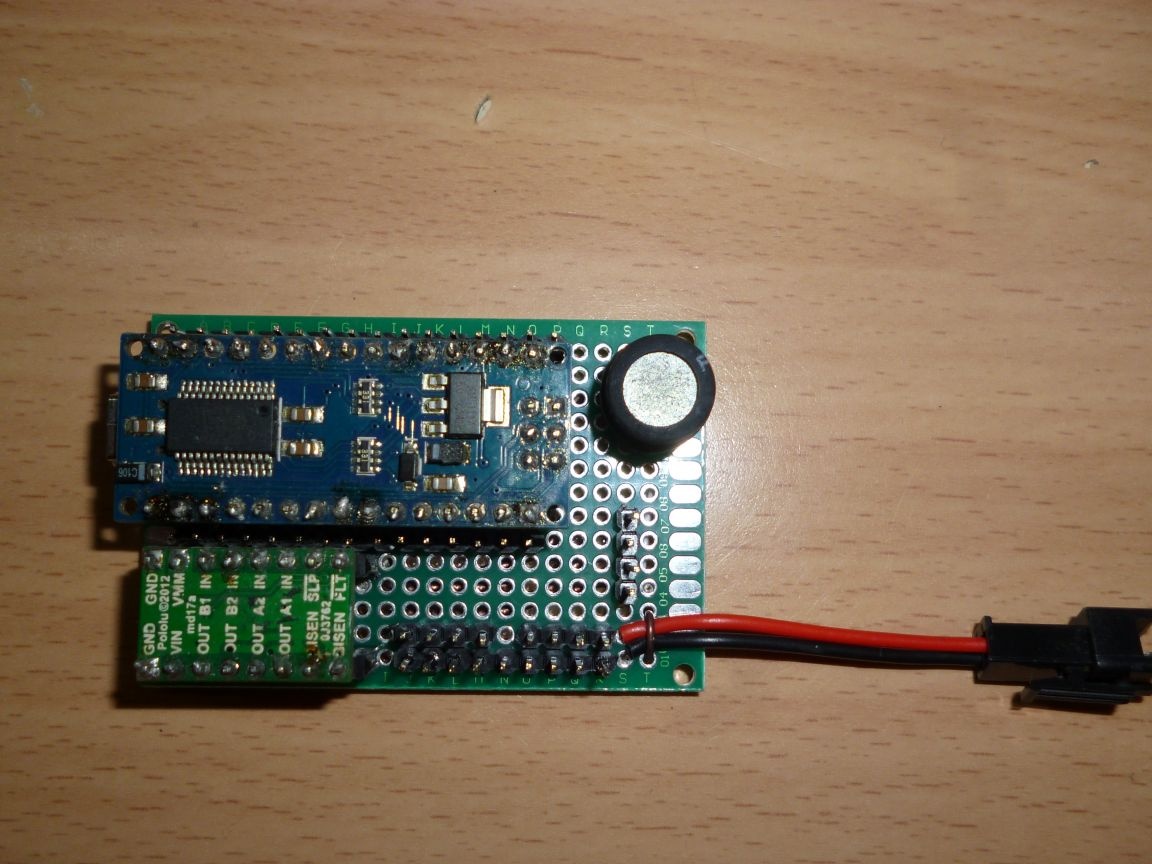
Wir haben Arduino Nano und DRV 8833 an ihre Stelle gesetzt:
Für die Stromversorgung werden 6 Ni-Mn 1,2 V 1000 mA-Batterien verwendet, die in Reihe gelötet und mit Klebeband gewickelt sind. Kleben Sie sie auf einen beidseitigen Klebeband-Beifahrersitz.

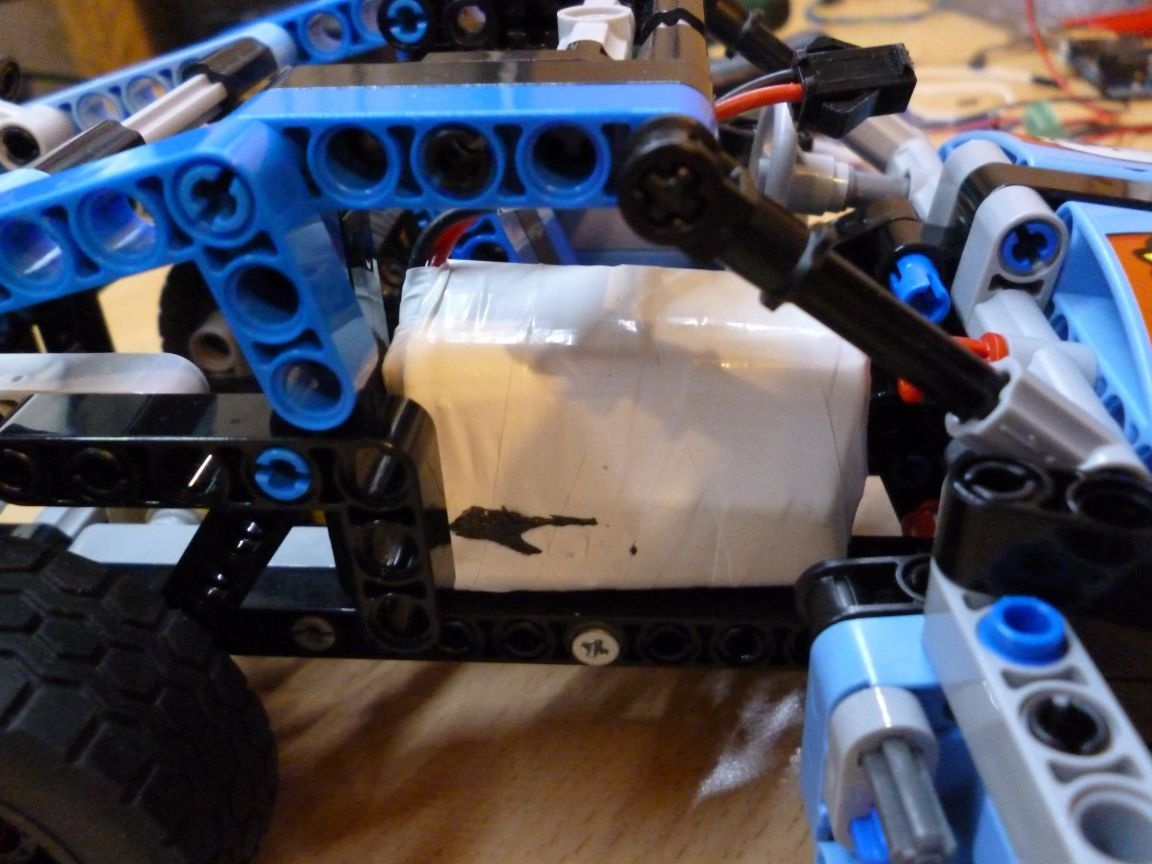
Wir schließen alles nach dem Schema an und installieren es auf der Rückseite der Maschine. Sie können auch einige LEDs hinzufügen. Setzen Sie sie in die Scheinwerfer ein und verbinden Sie sie mit Pin 14 (A2).
Schritt 4 Firmware.
Zum Schreiben der Firmware habe ich die Arduino IDE verwendet. Die aktuelle Version zum Zeitpunkt des Schreibens ist 1.8.1. Es ist zweckmäßig, das Kommunikationsprotokoll unter Verwendung des 433-MHz-Moduls unter Verwendung der rc-switch-2.52-Bibliothek zu implementieren. Sie müssen es herunterladen und zum Ordner "Bibliotheken" der Arduino IDE hinzufügen.
Wir verbinden das Arduino und flashen es mit der folgenden Firmware:
Um die Leistung unseres Modells zu testen, benötigen wir ein zweites Arduino-Board. Es ist erforderlich, einen 433-MHz-Funksender an die zweite Karte anzuschließen. Der Sender ist wie folgt angeschlossen:
VCC (Sender) bis 5+ (Arduino),
GND zu GND,
DATEN bis D10.
Schreiben Sie dort die modifizierte SendDemo-Skizze. Es befindet sich in den Beispielen in der von uns installierten Bibliothek und dient zum Senden von Befehlen. Bevor Sie die Skizze flashen, müssen Sie sie geringfügig ändern, dh die übertragenen Befehle ändern. Schreiben Sie je nachdem, was Sie überprüfen müssen, die folgenden Befehle in die Sendezeile:
"1" - Vorwärtsbewegung (Befehl ohne Anführungszeichen schreiben!)
"2" - Rückwärtsbewegung
"15" - Punkt
"3" - Lenkrad nach links drehen
"4" - Lenkrad nach rechts drehen
"5" - Lenkrad in die Mitte stellen
"10" - Schalten Sie die Scheinwerfer ein
"11" - Schalten Sie die Scheinwerfer aus
Die Herstellung einer Fernbedienung mit einem 433-MHz-Funksender ist ein Thema für einen separaten Artikel. Ich werde auf jeden Fall die Anleitung zur Herstellung einer solchen Fernbedienung schreiben.
Ich möchte sagen, dass diese Option für fast jedes Modell von Lego-Autos geeignet ist. Es reicht aus, alle Mechaniker zu verbinden und einen Platz für das Board zu finden. Und wenn Sie Fantasie einbeziehen, können Sie jedes Modell mechanisieren.