


Ich habe an meinem Entwurf anhand der Montageanleitung für Lego Technic 42029 teilgenommen. Der Rest ist meine Improvisation. Also brauchen wir:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (besser als Populus, aber Sie können auch ein chinesisches Gegenstück haben)
- 2 Servoantriebe SG-90
- IR-Empfänger
- Motorgetriebe 200 U / min
- 2 LEDs
- 2 Widerstände 150 Ohm
- Kondensator 10v 1000uF
- 2 einreihige Kämme PLS-40
- 2 PBS-20-Anschlüsse
- Induktor 68mkGn
- 6 NI-Mn 1,2 V 1000 mA-Batterien
- Stecker Papa-Mama zwei Pin zum Draht
- Homutik
- Drähte in verschiedenen Farben
- löten
- Kolophonium
- Schreibwarenmesser
- Lötkolben
- Schrauben 3x40 und Muttern und Unterlegscheiben für sie
- Schrauben 3x60
- Batterien Ni-Mn 1,2 V 1000 mA 6 Stk.
Schritt 1 Wir sammeln die Rückseite der Aufhängung.
Zunächst müssen Sie die Hinterradaufhängung gemäß den Anweisungen von Lego 42029 Teil 1 montieren, beginnend mit 3 Seiten und 8 einschließlich. Fügen Sie als Nächstes einige Details hinzu, damit Sie den Motor und das Getriebe einbauen können.
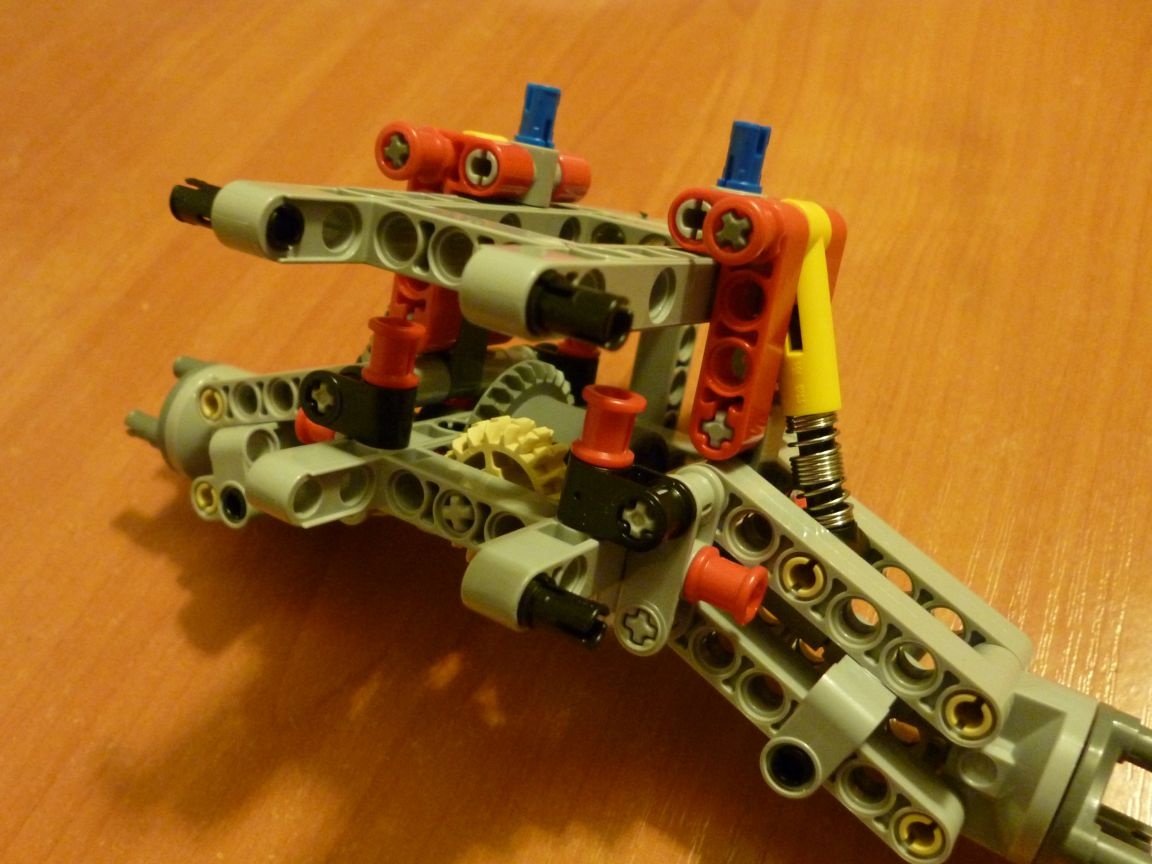

Schritt 2 Vorderradaufhängung.
Wir montieren den vorderen Teil der Aufhängung gemäß den Anweisungen von Lego 42029 Teil 1, von Seite 21 bis 23. Wir nehmen das Trapez aus dem zweiten Teil der Lego-Anweisungen von Seite 6 bis 11. Wir montieren die Winde aus dem zweiten Teil von Seite 14 - 22. Und der zweite Teil des Stoßfängers umfasst 34 bis 36 Seiten.
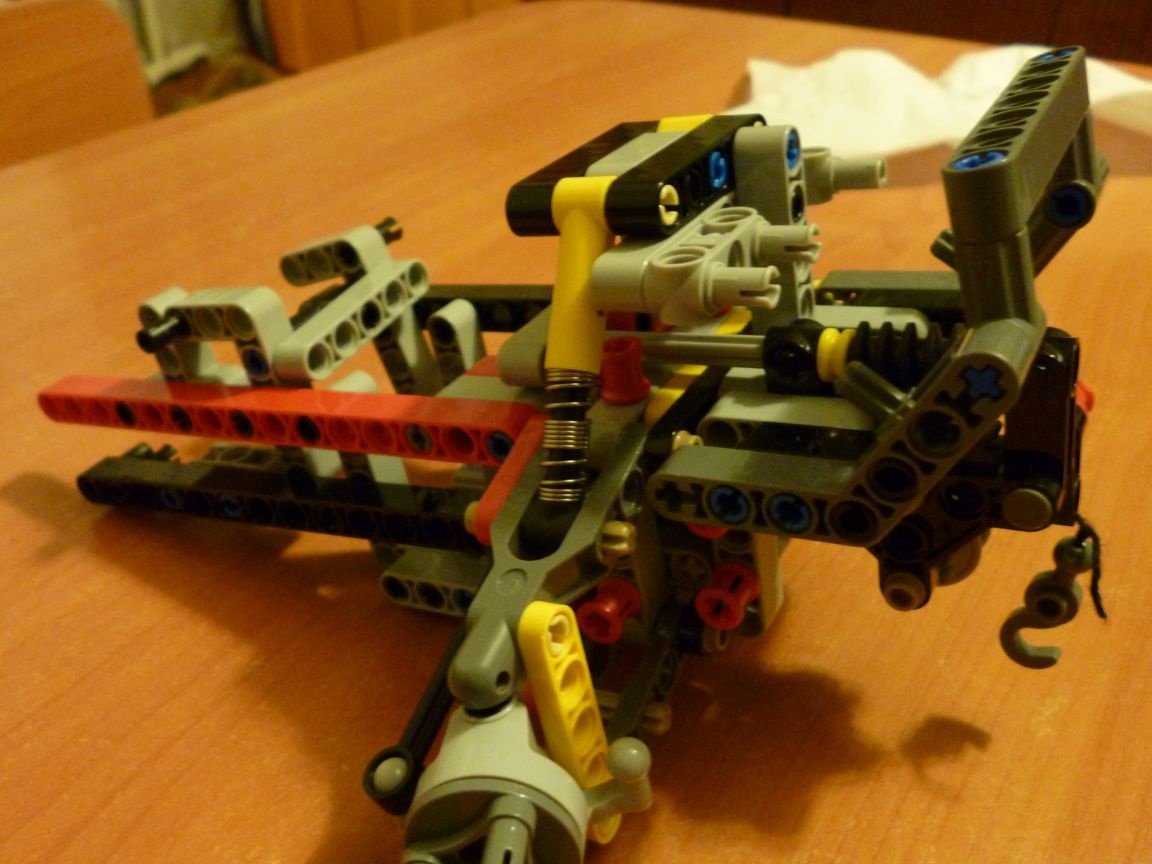
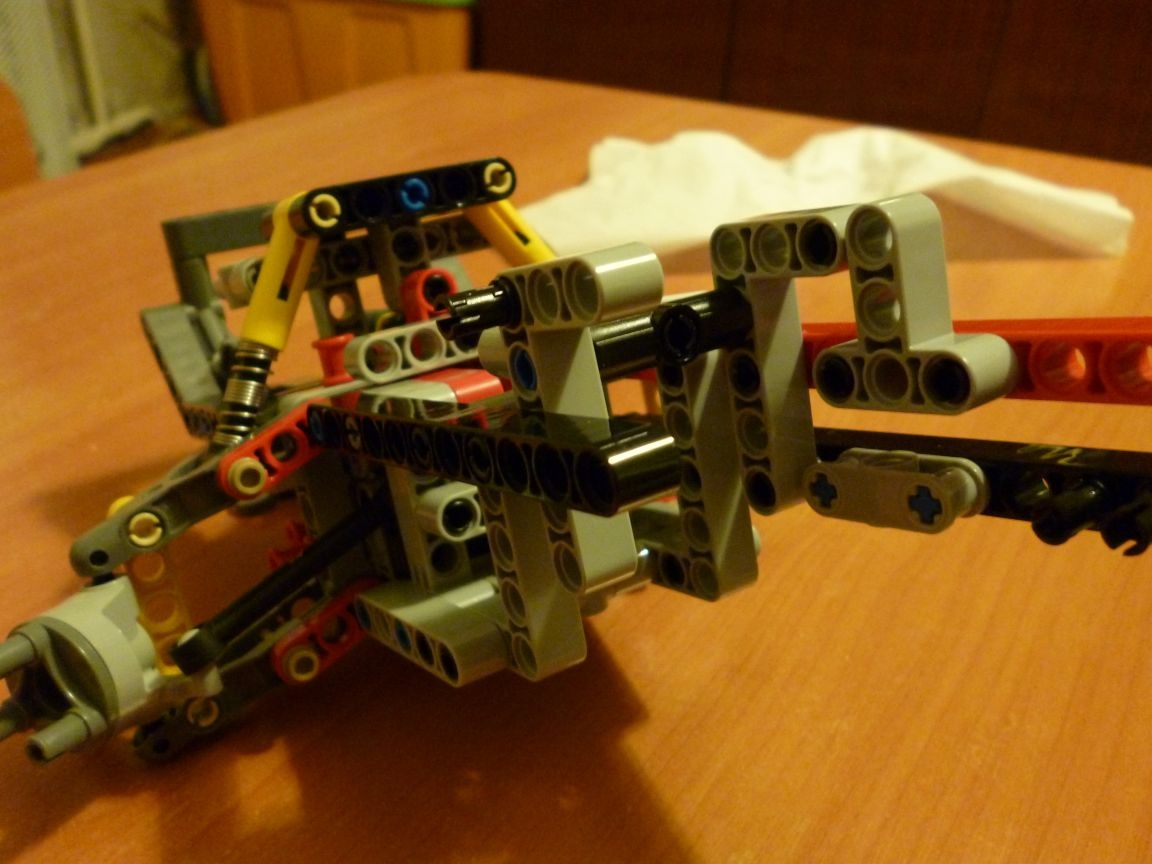

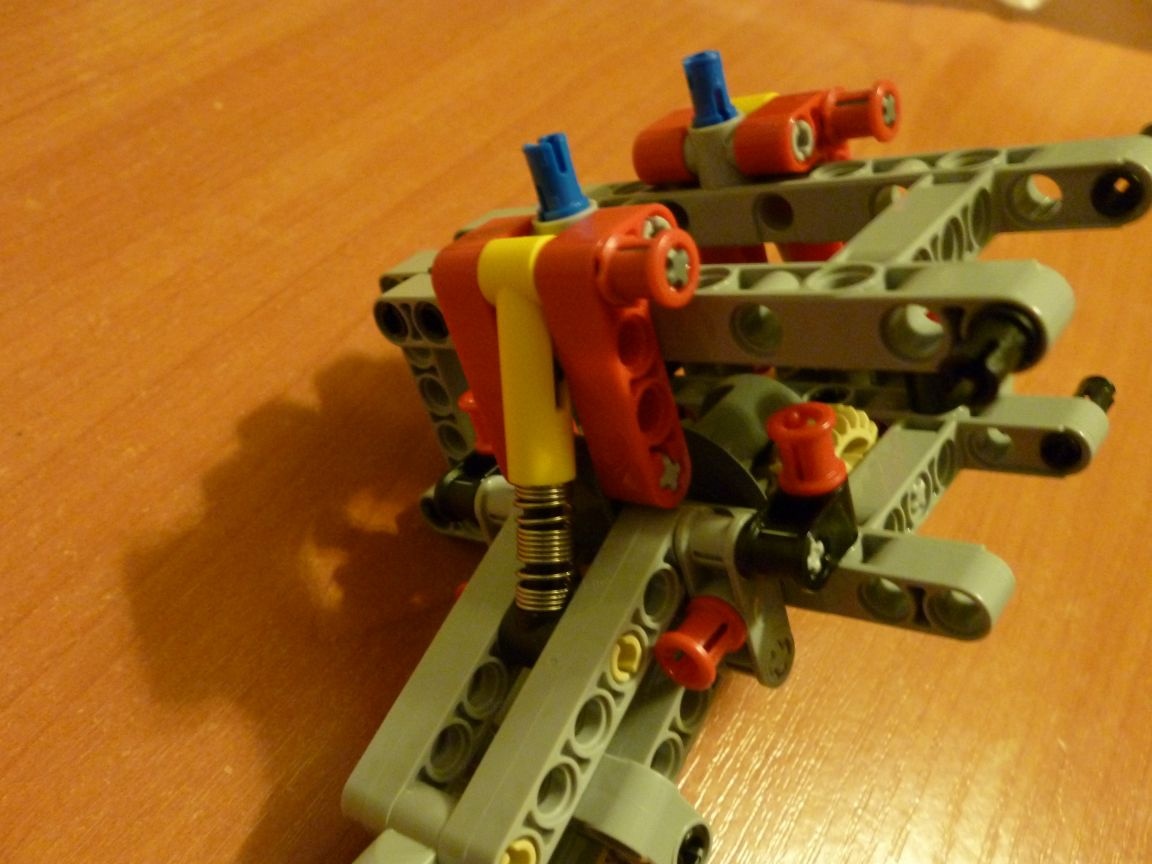
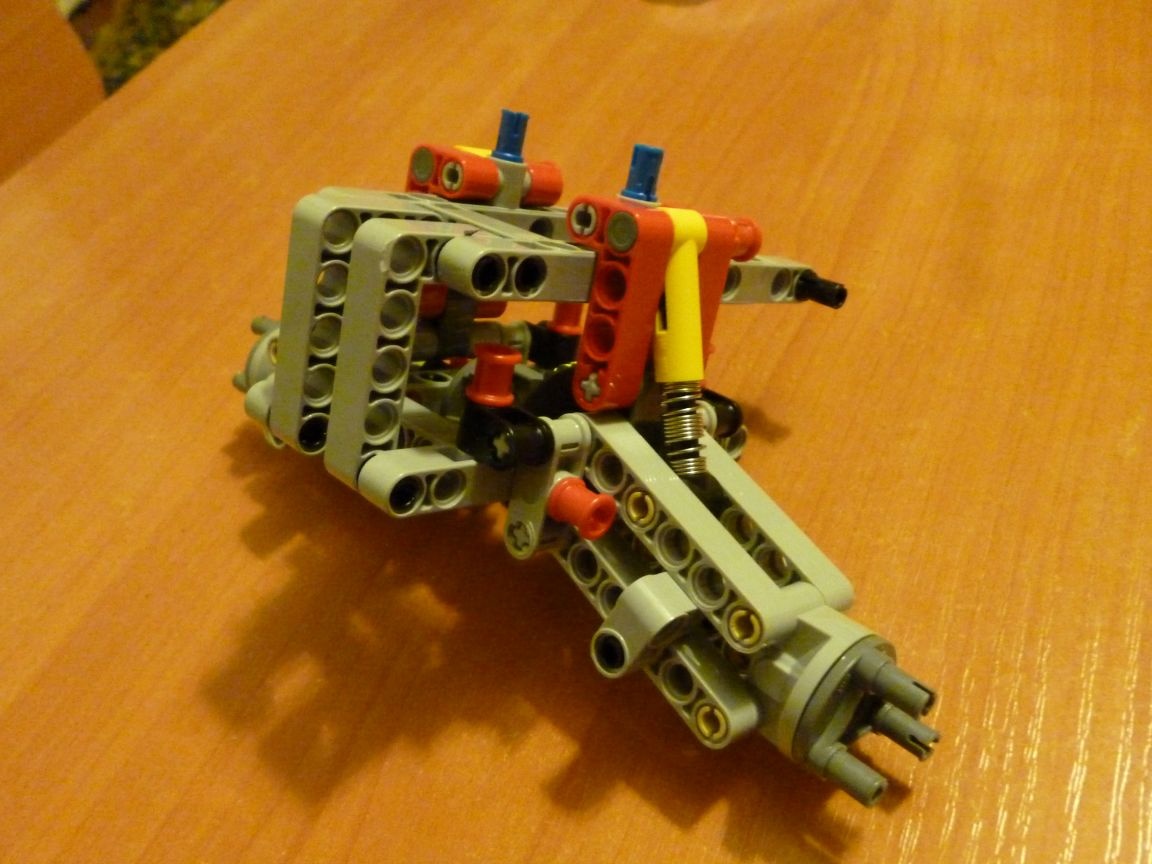
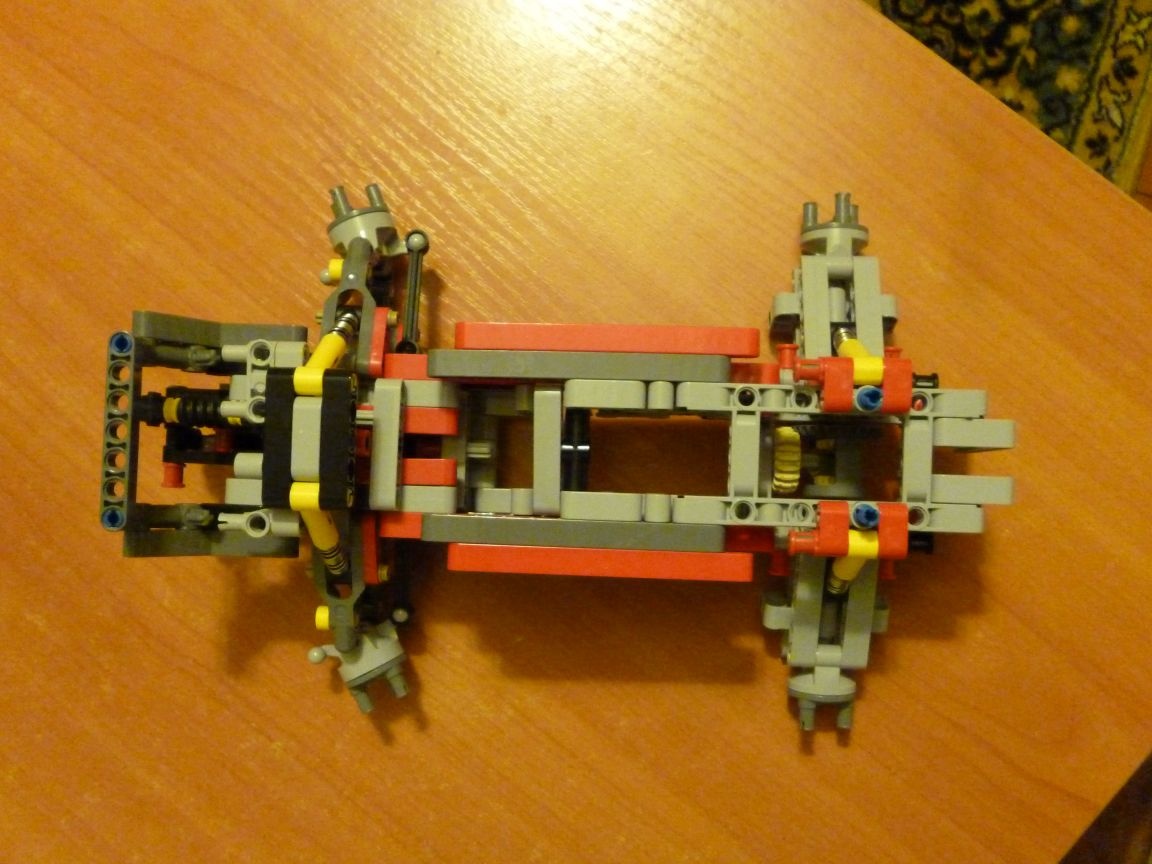
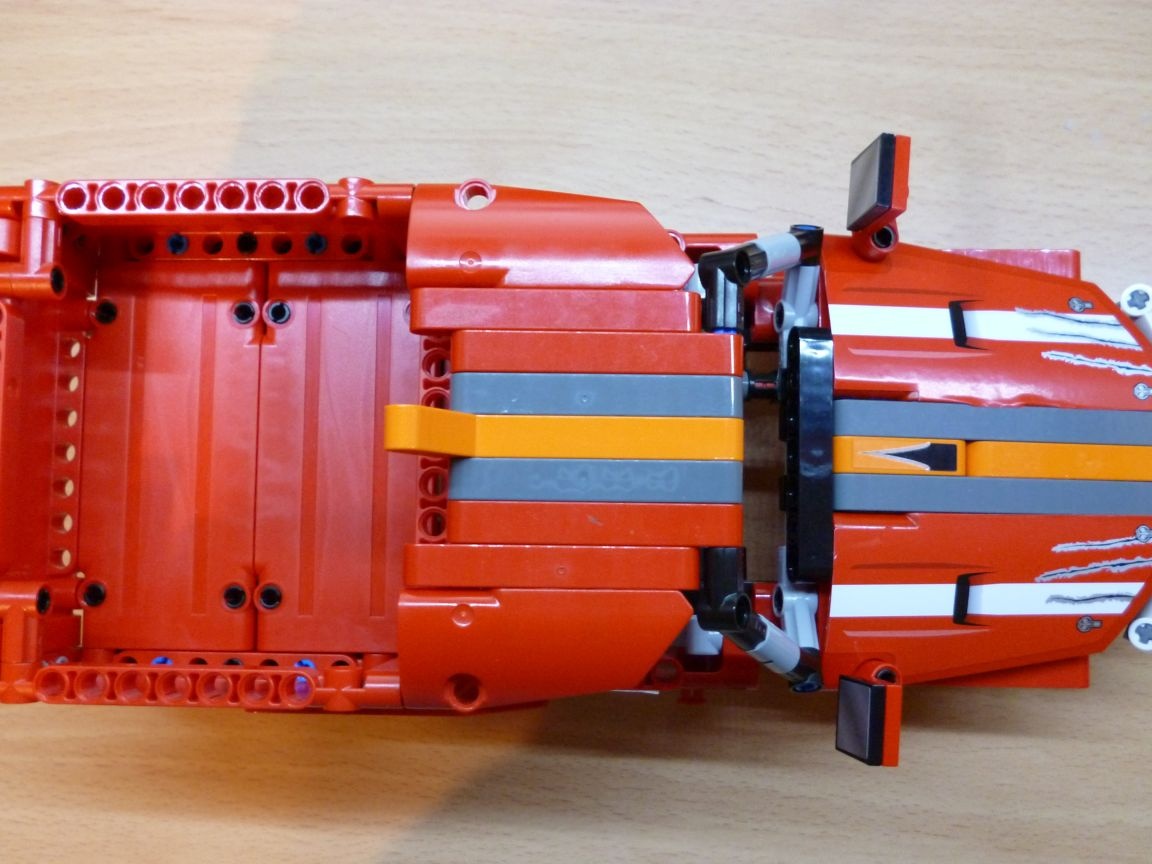
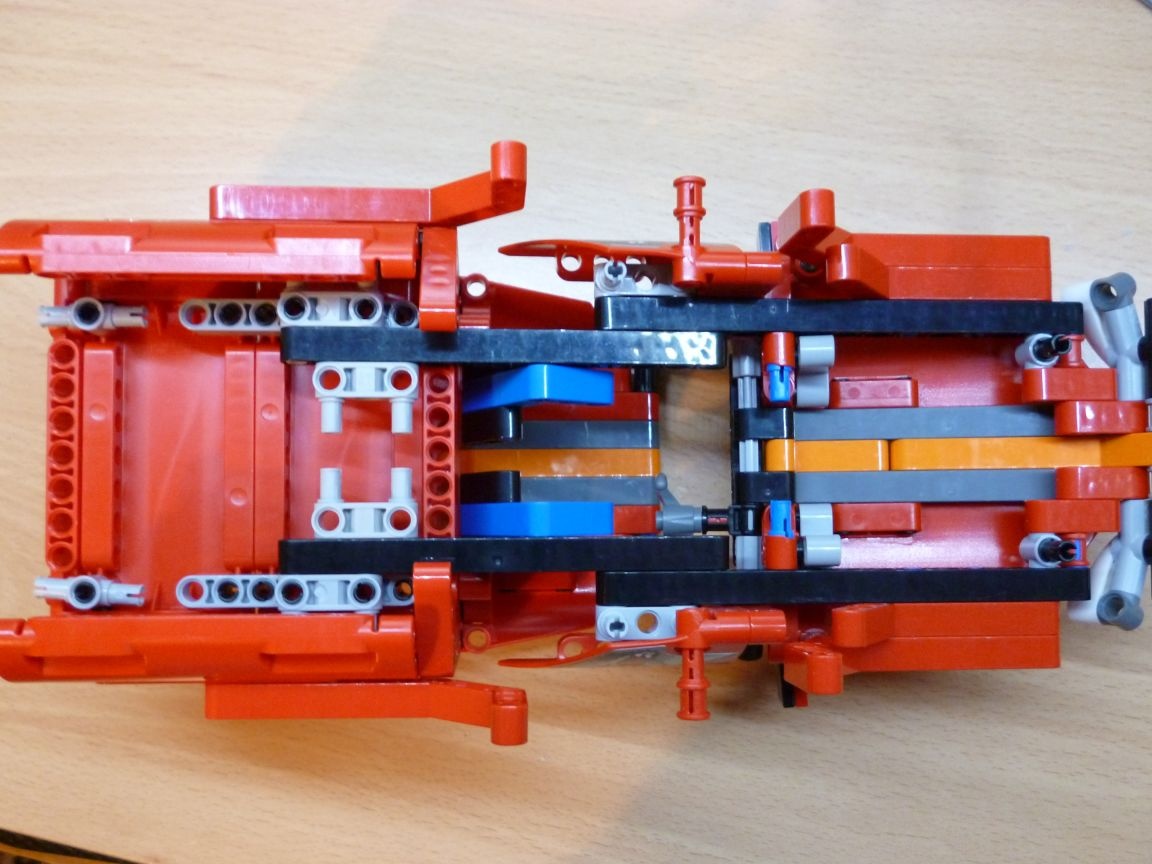
Schritt 3 Montieren Sie das Chassis.
Wir verbinden beide Teile wie auf dem Foto gezeigt:

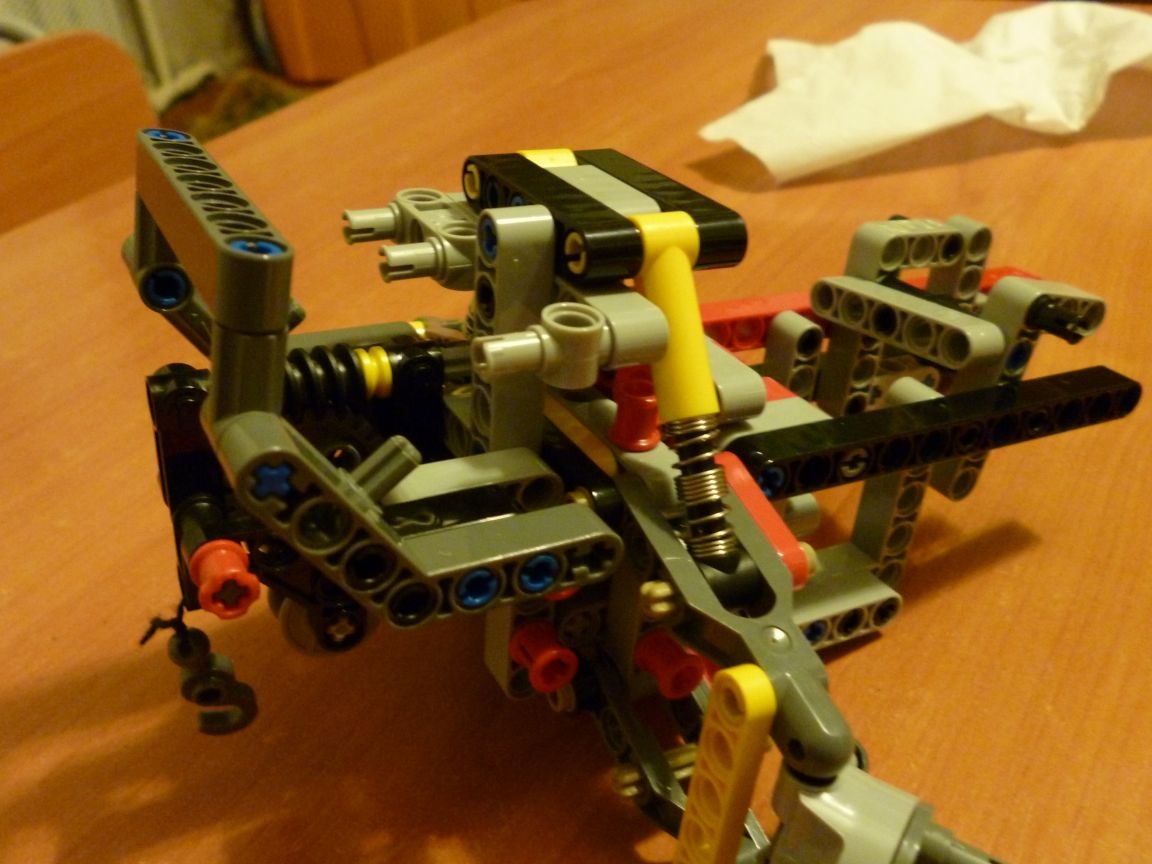
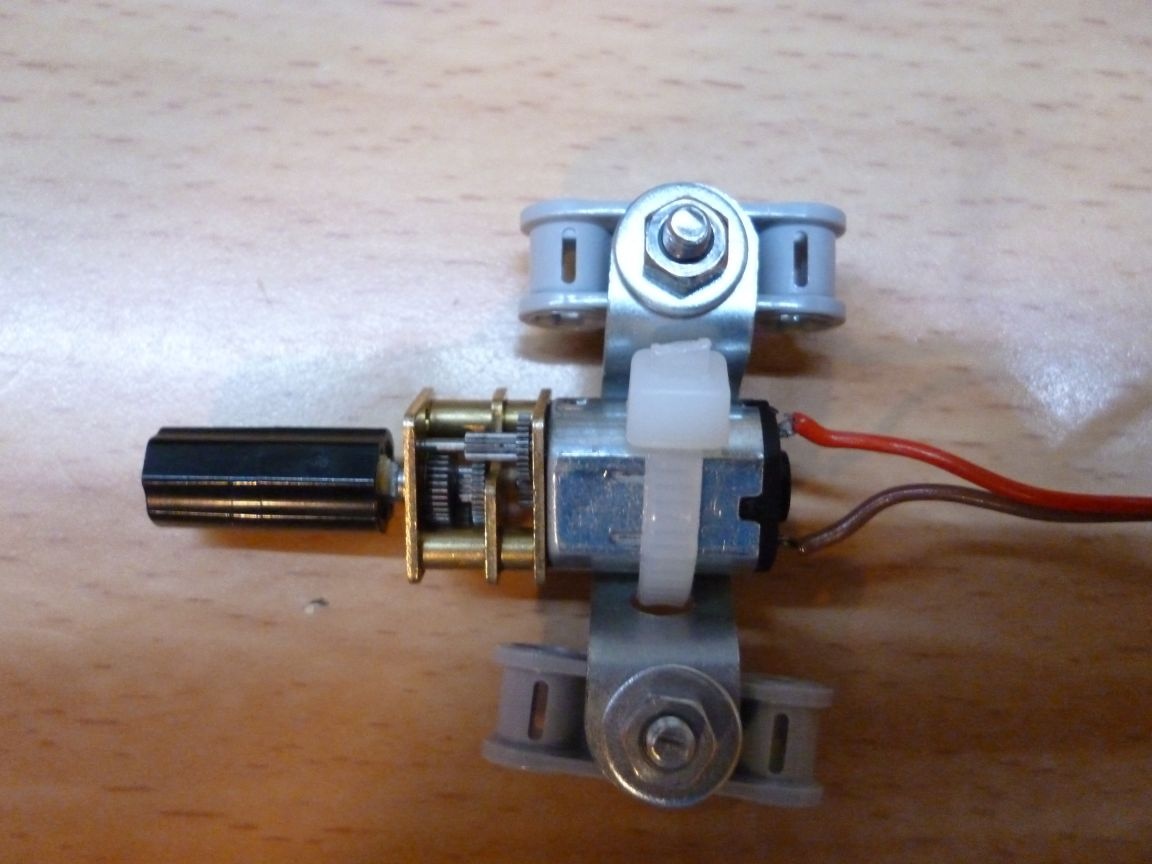
Ich habe das Problem des Verbindens des Getriebemotors mit den Teilen des Konstrukteurs wie folgt gelöst: Ich habe die Verbindungshülse auf die Achse des Getriebemotors gelegt und ein Streichholzstück zur Befestigung eingesetzt. Für die Montage des Getriebemotors wurde Metallkunststoff von einem Eisenkonstrukteur und eine Klammer verwendet.
Es stellte sich Folgendes heraus:
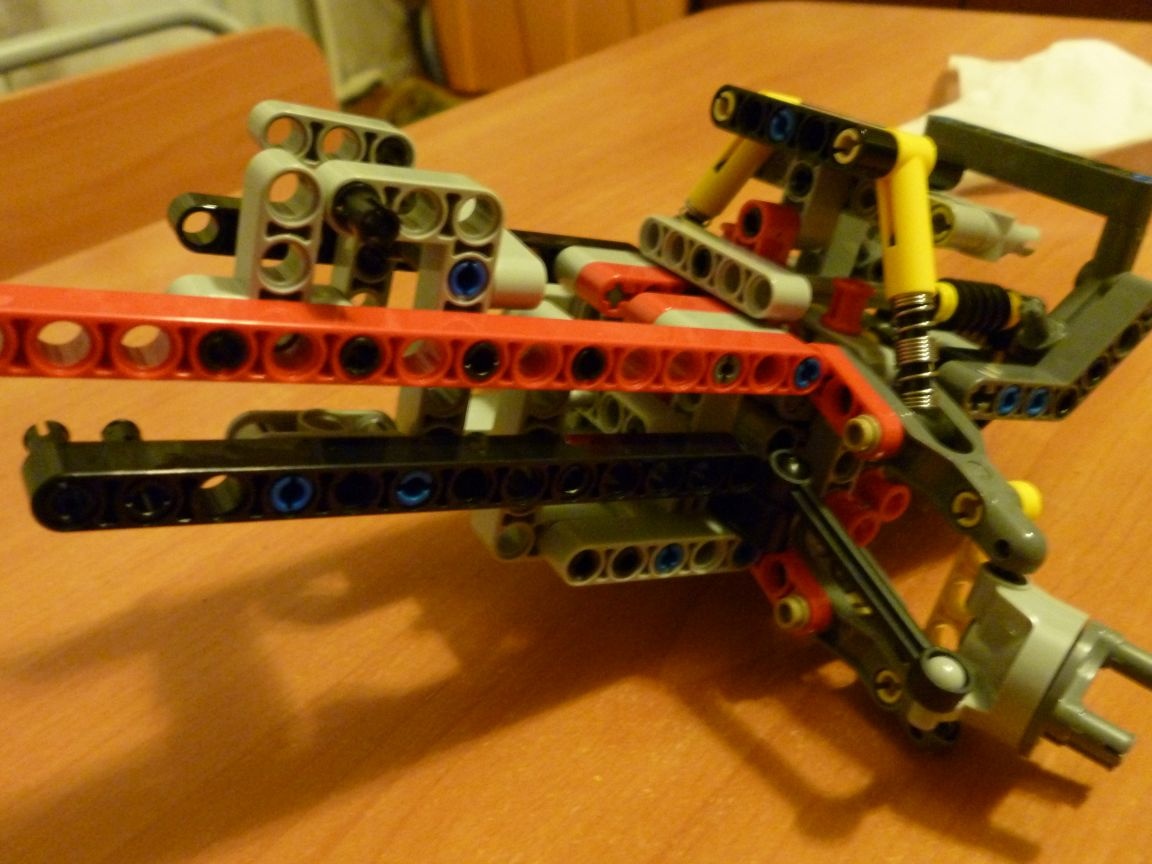
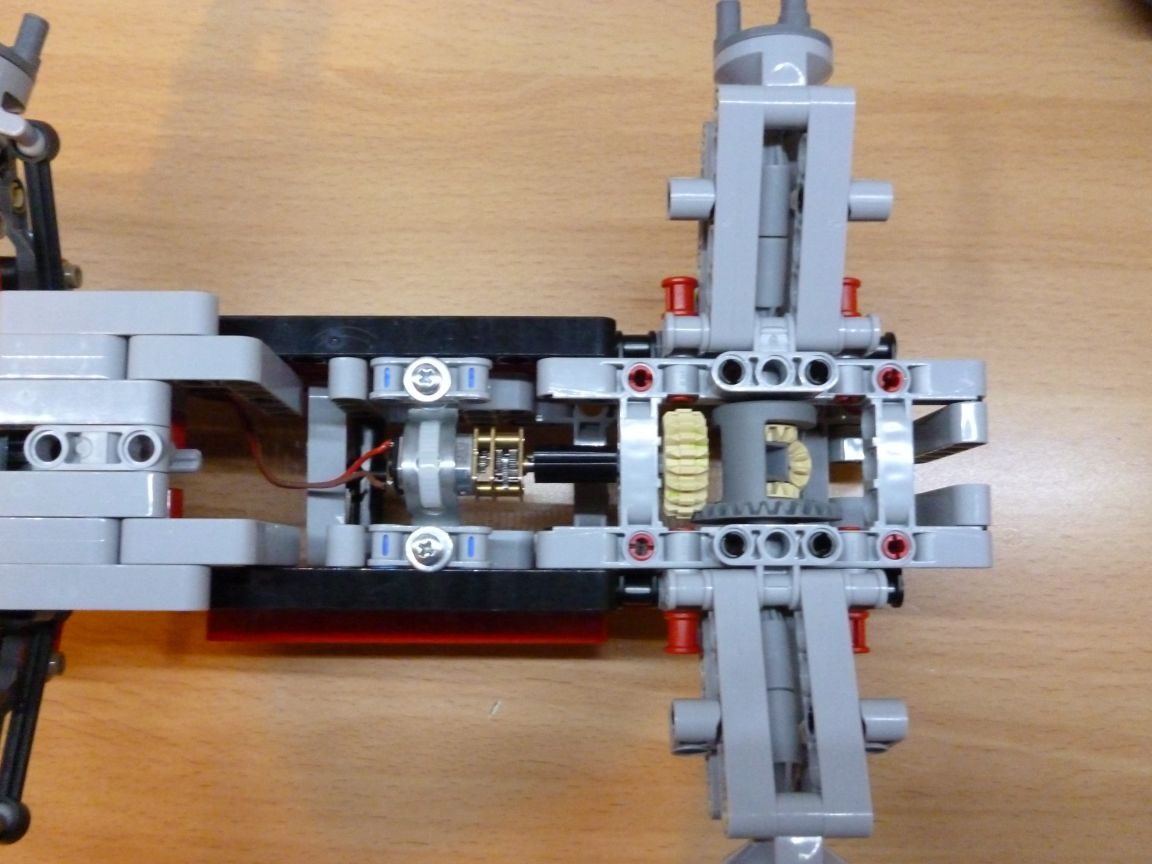
Montage am Chassis:
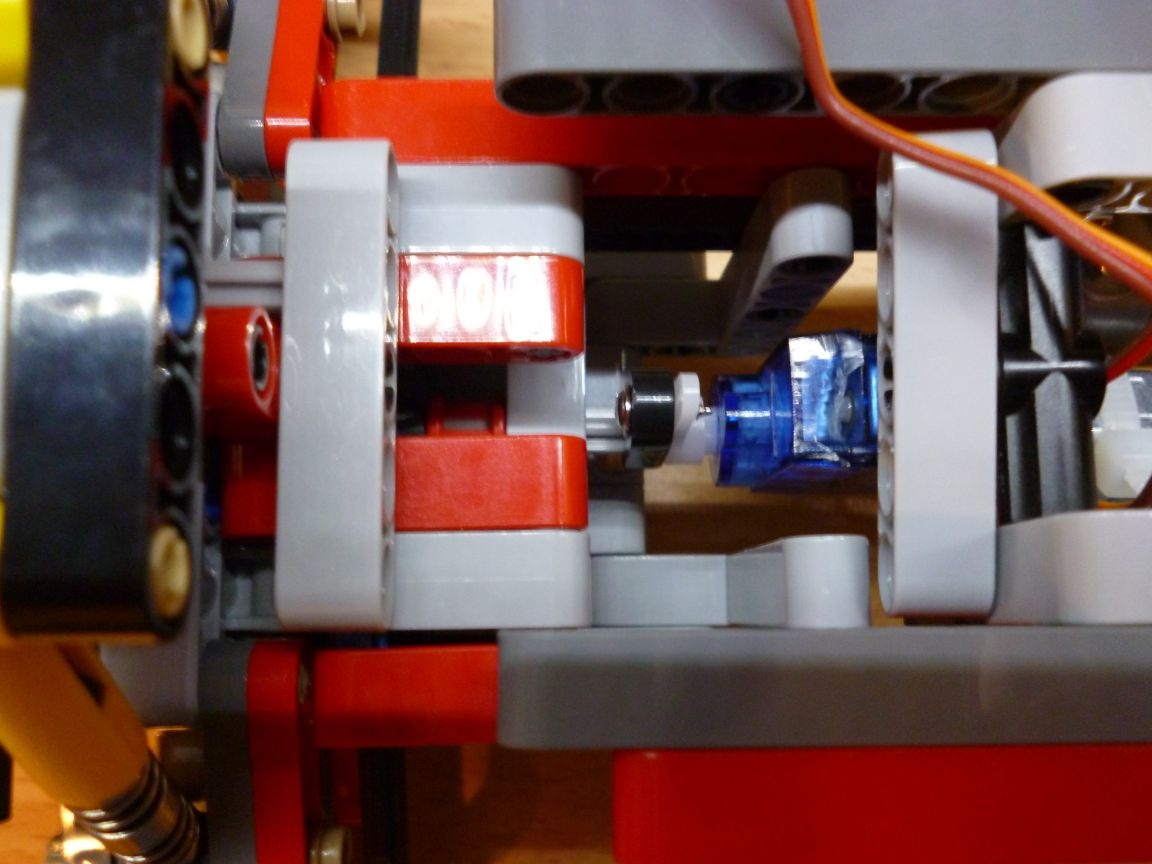
Zur Durchführung der Drehung wurde das Servo SG-90 benötigt. Um die Innenteile nicht zu berühren, muss ein Durchgangsloch mit einem Durchmesser von 3,2 mm vorsichtig gebohrt oder einfach mit einem Schreibwarenmesser geschnitten werden. Schneiden Sie auch die hervorstehenden Teile ab („Flügel“ zur Befestigung). Wir setzen einen Bolzen in das Loch ein und befestigen ihn mit Muttern. Auf der Servowelle setzen wir einen Hebel mit einem Schraubteil von lego auf:
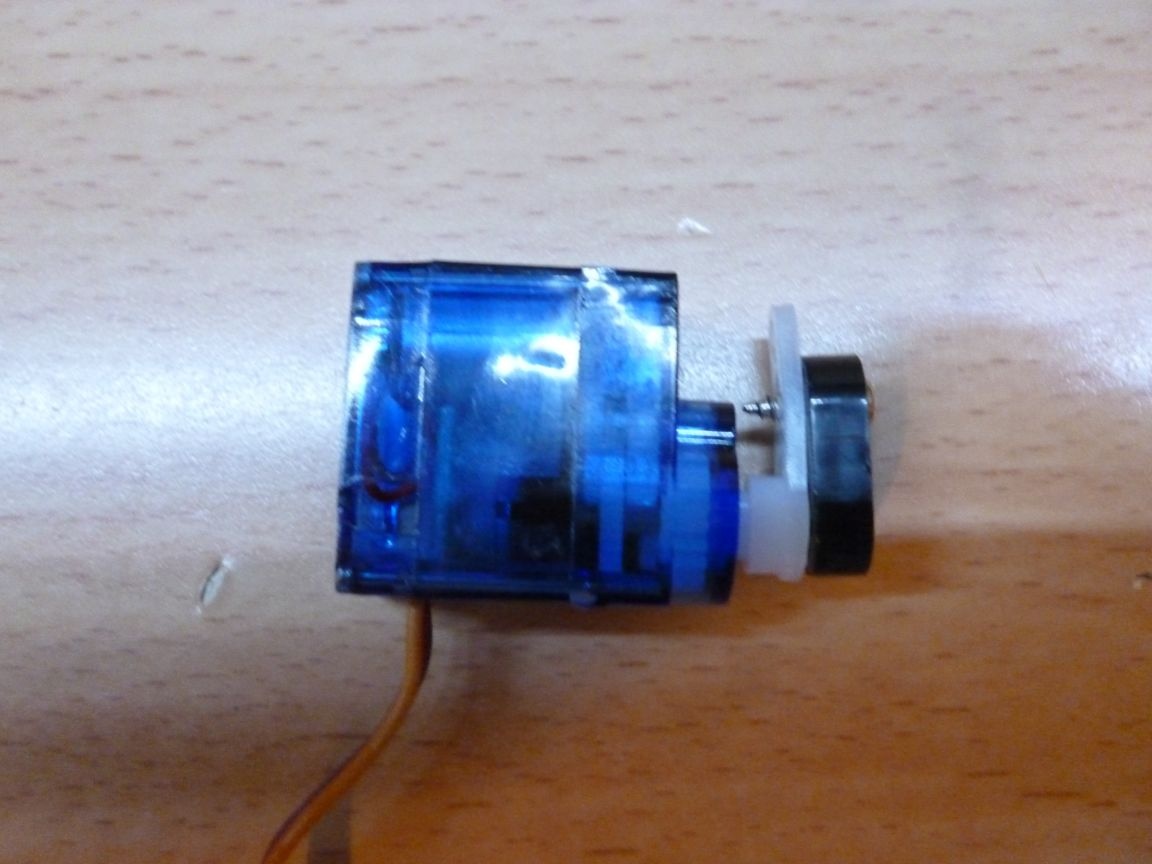
Installieren:
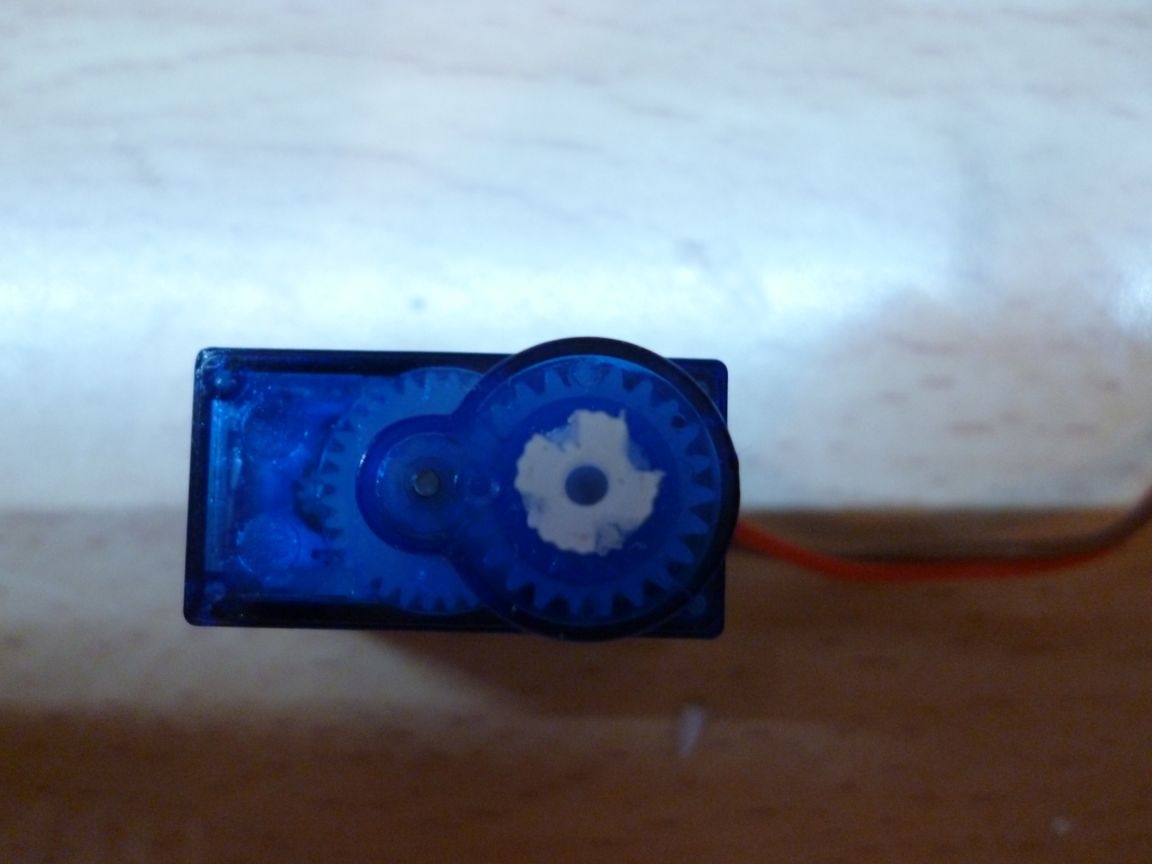
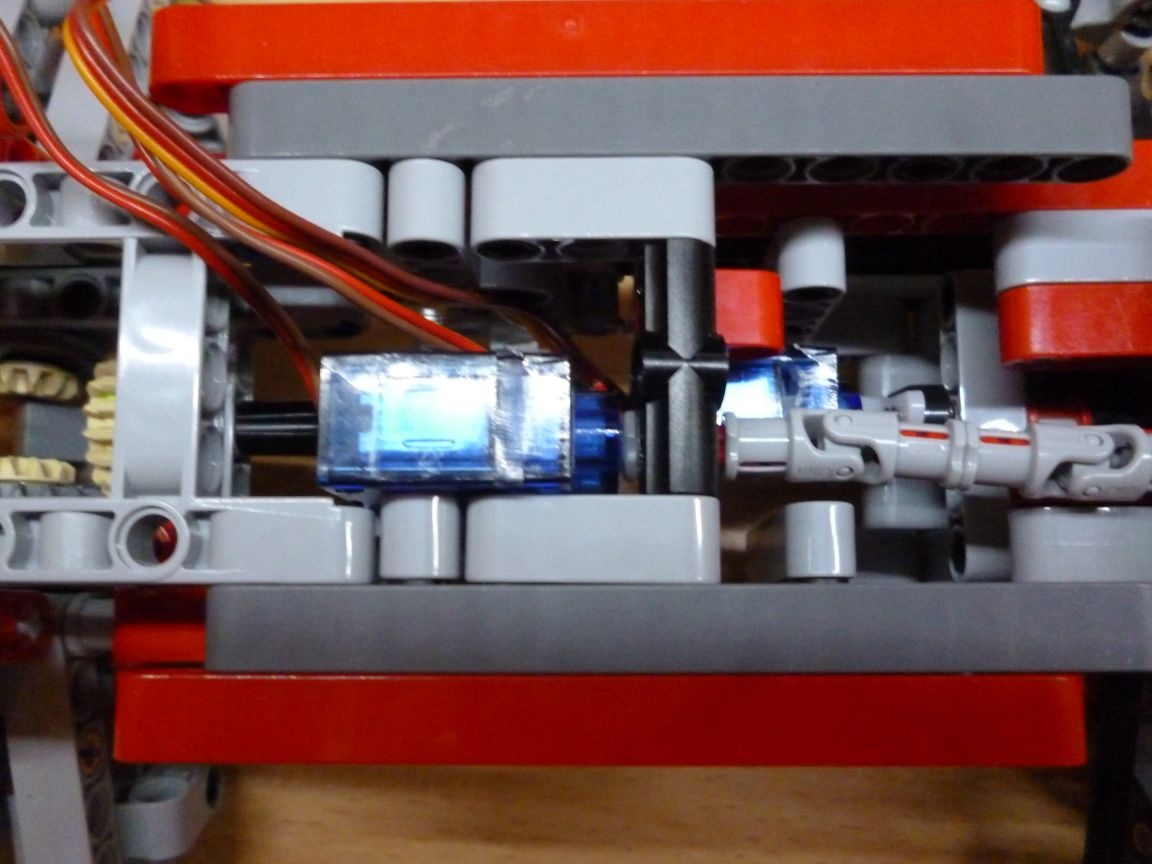
Wir werden das zweite Servo für die Winde verwenden. Wir machen das gleiche wie beim ersten. Und jetzt muss es modernisiert werden, damit es sich frei drehen kann. Dazu zerlegen wir den Servoantrieb, entfernen die Platine und löten die Drähte direkt an den Motor. Wir nehmen das Hauptzahnrad heraus und schneiden seine Fahrstopps ab.Und schließlich machen wir einen Schlitz mit einem Schreibmesser im Hauptzahnrad wie auf dem Foto:
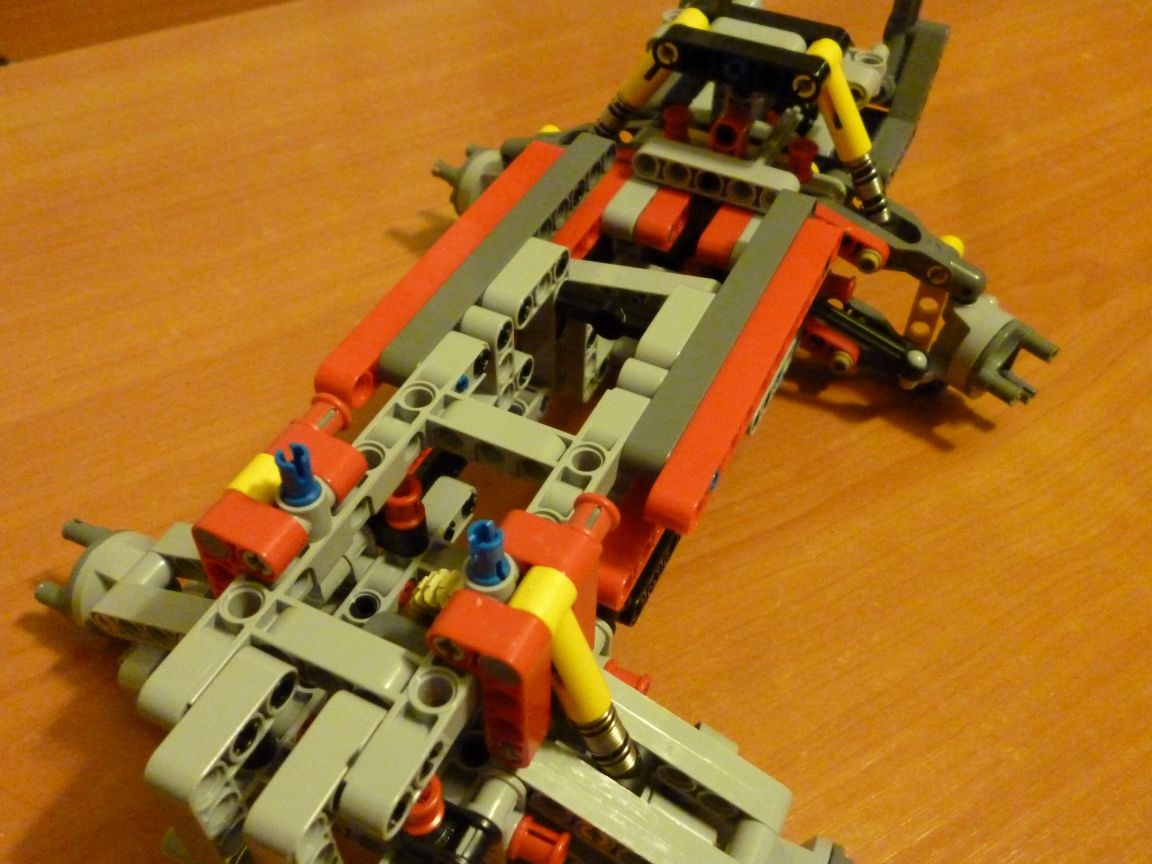
Wir verbinden uns mit unserer Winde und setzen das Fahrgestell auf:

Schritt 4 Controller verwalten
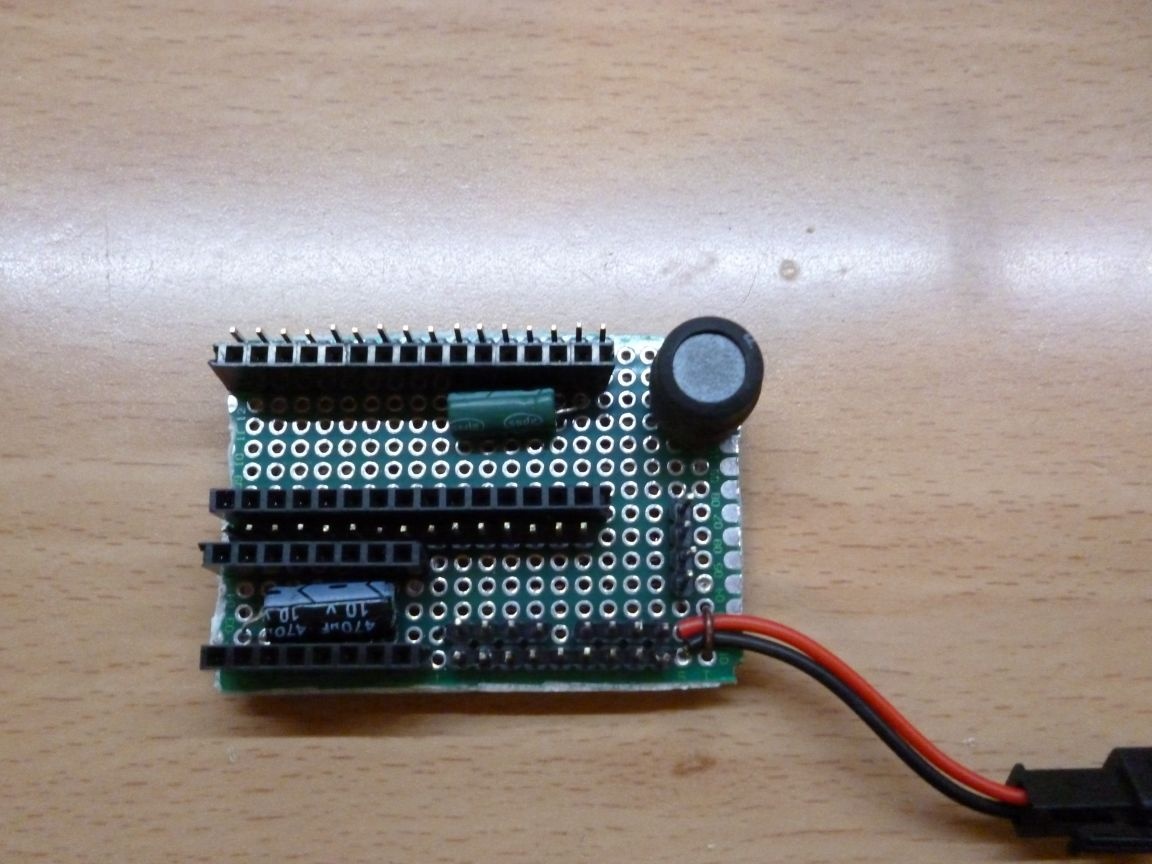
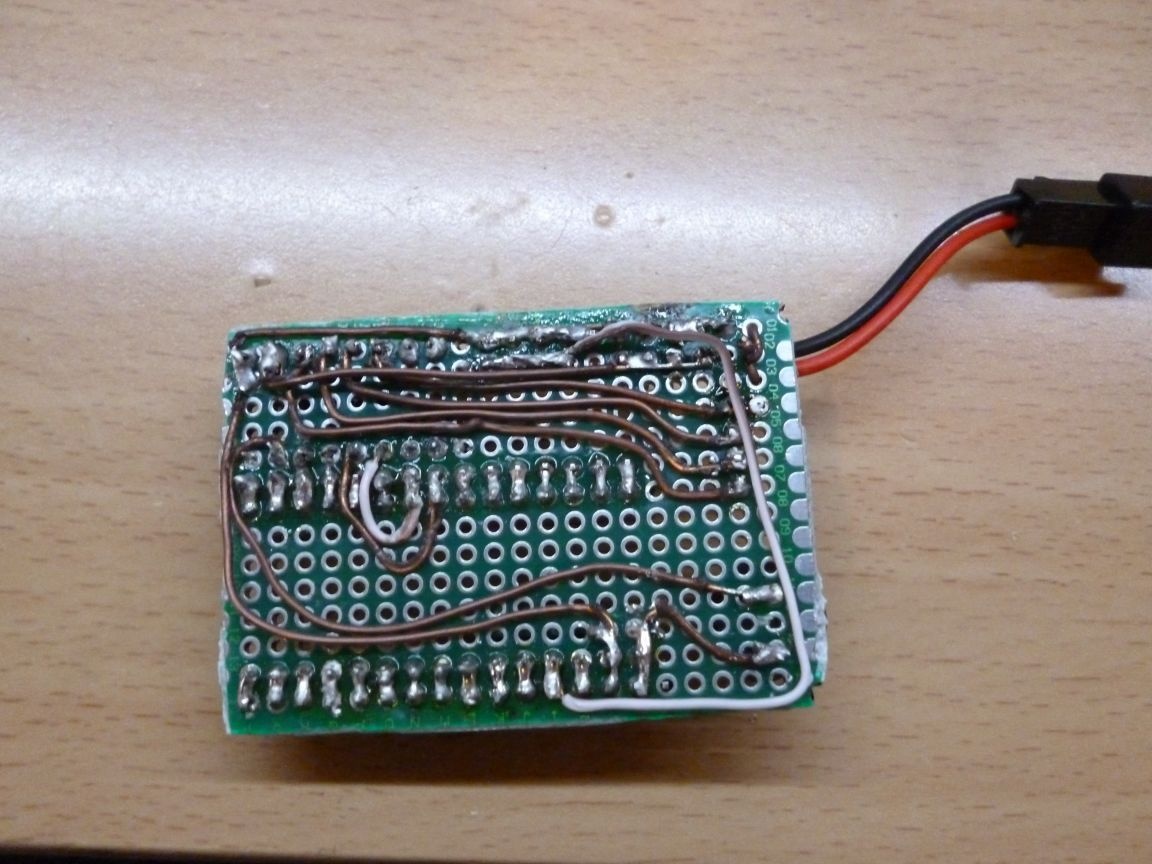
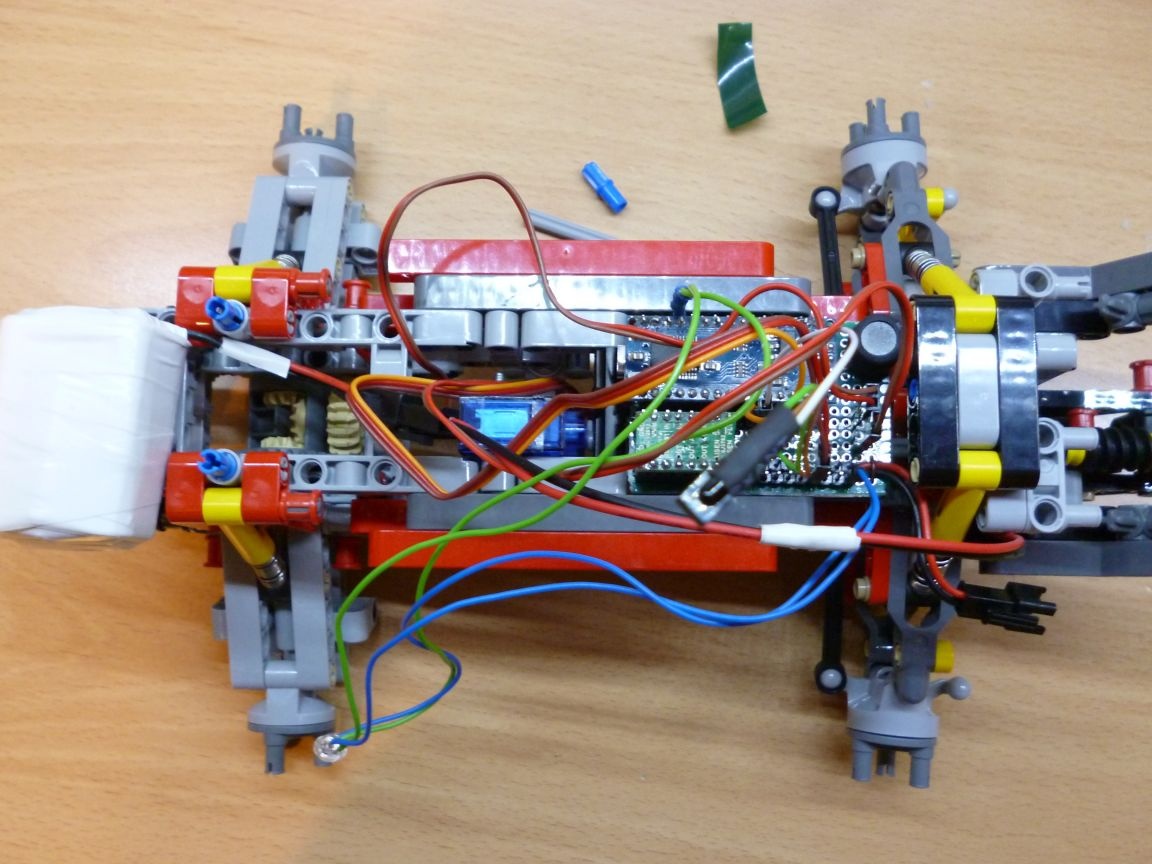
Zur Steuerung verwenden wir Arduino und IR-Empfänger. Wir nehmen einen Lötkolben und montieren folgendes auf der Leiterplatte:
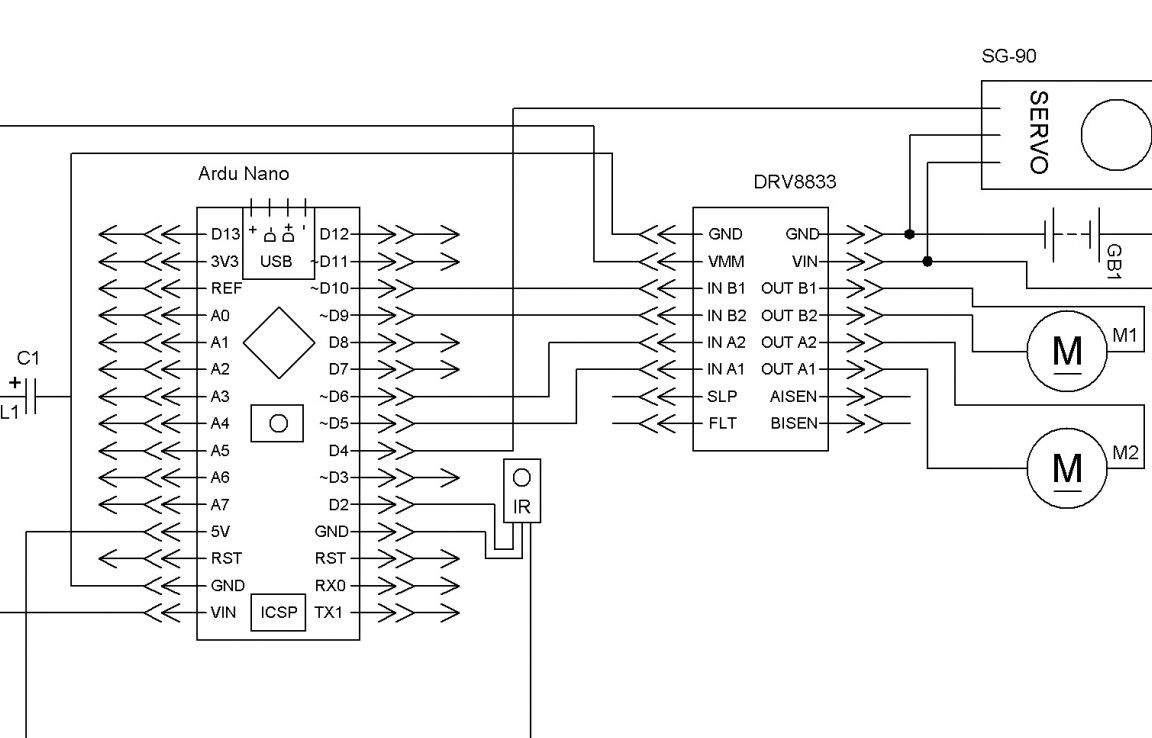
Ich erkläre: Bei jedem Kondensator mit geringer Leistung, der Induktivitätsspule, die Sie ebenfalls finden, müssen Sie die Spannung des Mikrocontrollers stabilisieren. Für die verwendeten LEDs werden Widerstände ausgewählt. IR-Empfänger oder TSOP können aus einem alten Spielzeug entnommen oder in einem Radiogeschäft gekauft werden. Wenn starke Störungen auftreten, fügen Sie dem Stromkreis des IR-Empfängers einen Kondensator hinzu.
Als Ergebnis erhalten wir:
Wir installieren Arduino Nano und DRV 8833 an ihren Orten:
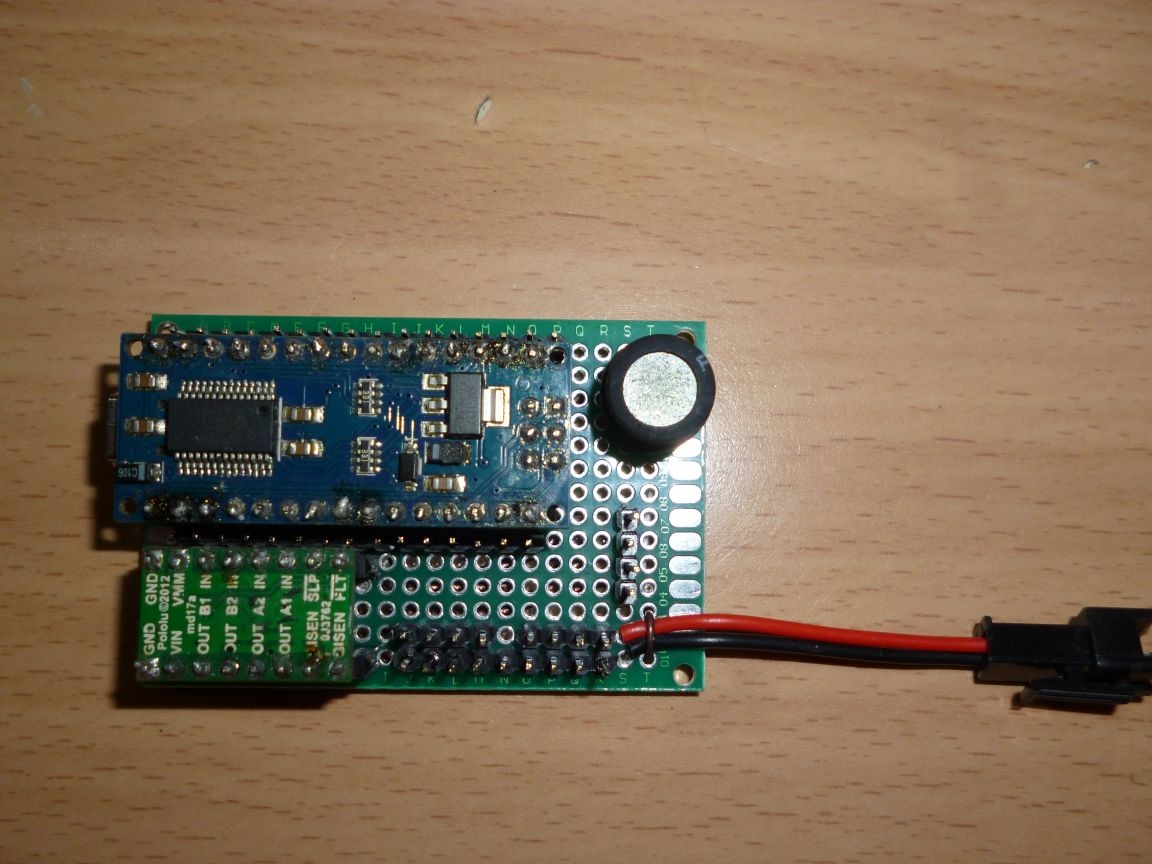
Und setzen Sie das Board auf das Chassis:
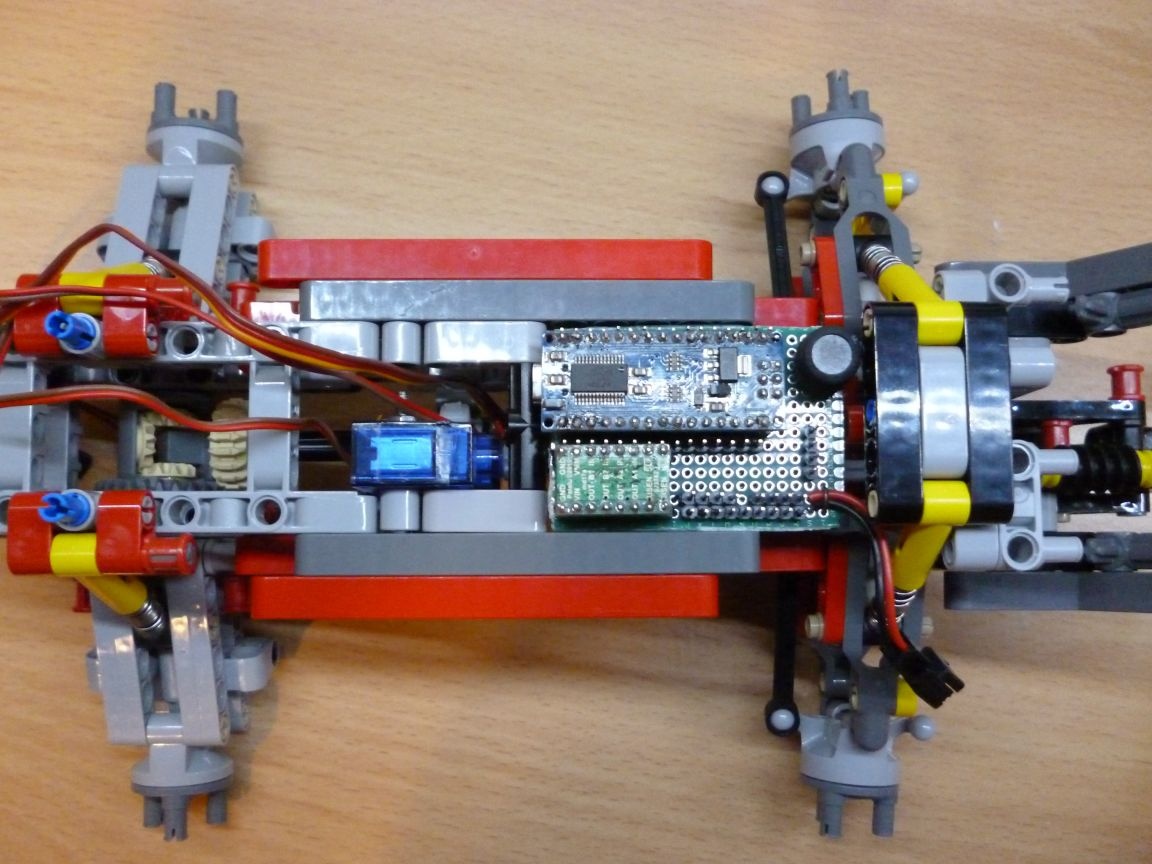
Stromversorgung - 6 Ni-Mn 1,2 V 1000 mA Batterien. Es ist notwendig, sie in Reihe zu löten und mit Klebeband aufzuwickeln. Kleben Sie doppelseitiges Klebeband auf die Rückseite des Gehäuses.
Wir verbinden unsere gesamte Struktur:
Schritt 5 Kabine
Die Kabine ist persönlich meine Improvisation, es gibt keine vorgefertigten Anweisungen, also müssen Sie von Fotos sammeln.



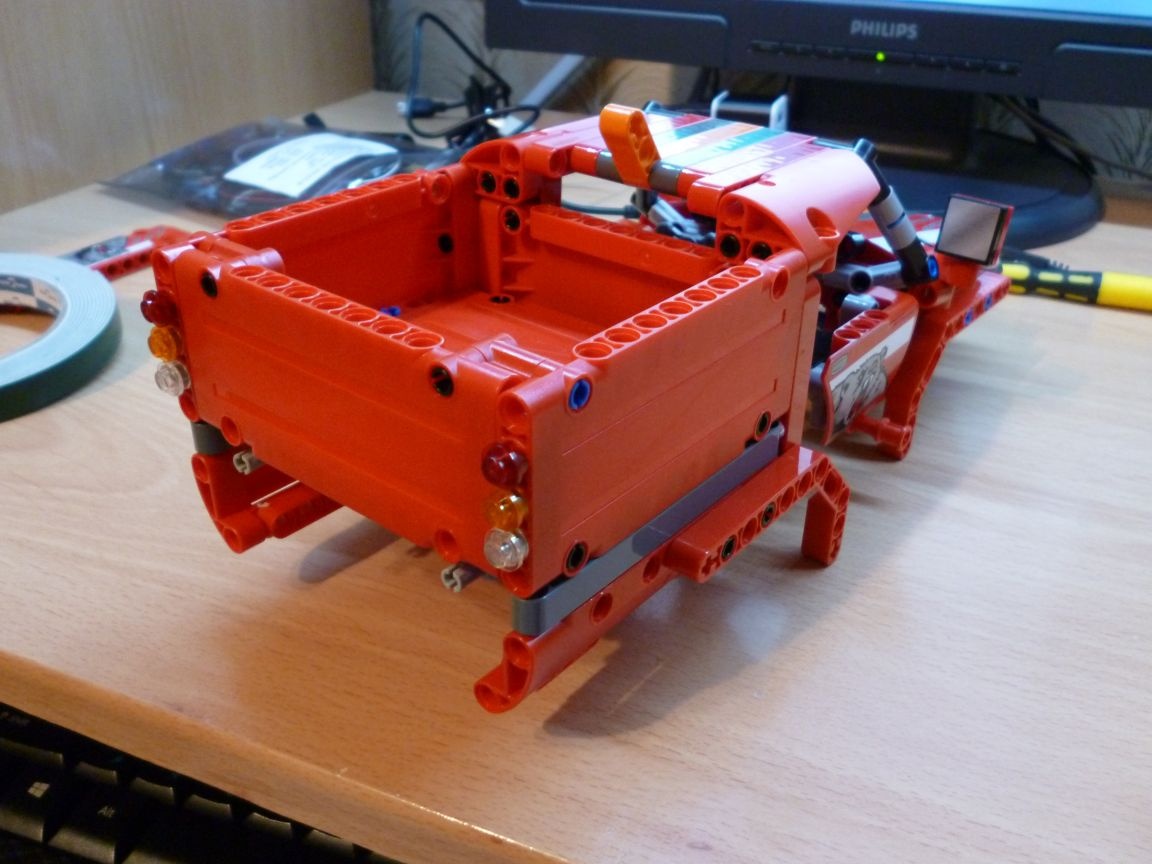
Sie können Ihre eigene Version zusammenstellen, Sie müssen sie nur unter das Chassis montieren. Die Hauptsache hier ist, die Montage mit dem Chassis abzustimmen. Es gibt vier von ihnen und sie sind auf dem Foto von der Unterseite der Kabine deutlich sichtbar.
Schritt 6 Firmware.
Heute programmiere ich jedoch wie immer in der Arduino IDE. Zuerst müssen Sie meine Firmware ausfüllen und über das Terminal die Fernbedienungscodes überprüfen, die Sie verwenden werden. Sie können jede IR-Fernbedienung nehmen, zum Beispiel von einem Fernseher, DVD-Player oder Ihre eigene zusammenbauen (ich habe eine selbstgemachte Fernbedienung vom Sega-Joystick). Durch Drücken einer Taste sehen wir im Terminal den Code der gedrückten Taste, schreiben Sie ihn auf ein Stück Papier. Wir machen das mit allen Tasten, auf denen wir die Aktionen programmieren wollen. Bearbeiten Sie als Nächstes die Skizze. Wir schreiben unsere Codes für die notwendigen Aktionen hinein und flashen sie erneut. Diese Firmware ist auf meiner Sega-Joystick-Fernbedienung konfiguriert. Beim Spielen mit der Maschine bemerkte ich einige Nuancen oder Unannehmlichkeiten. Es ist schwierig, während der Bewegung einen zuverlässigen Empfang von IR-Befehlen zu erreichen. Und es passiert so: Drücken Sie den Pfeil nach vorne, die Maschine erhielt einen Befehl zum Gehen und eilte vorwärts, ließ den Pfeil los, erhielt jedoch keinen Stoppbefehl und fährt weiter, bis er abstürzt oder stecken bleibt. Es gibt viele Pannen. Teilweise kann dieses Problem gelöst werden, indem die Anzahl der Wiederholungsversuche zum Senden eines Befehls erhöht wird. Dies ist jedoch nur möglich, wenn Sie die Fernbedienung selbst verwenden. Aber ich werde eine grundlegendere Lösung wählen - ich werde auf die Verwendung eines 433-MHz-Senders und -Empfängers umsteigen. Ich werde darüber im nächsten Artikel schreiben.
Schritt 7 auf Räder setzen.
Also müssen wir nur die Kabine auf das Fahrgestell setzen, die Räder aufsetzen und unseren SUV in Aktion überprüfen.

