
Materialien und Werkzeuge:
- Mikrocontroller Arduino (in diesem hausgemacht wendet Arduino Uno Rev 3) an;
- Zwei Servos von Parallax;
- Joystick (ebenfalls von Parallax);
- Leiterplatte) klein);
- Anschlüsse zum Anschluss;
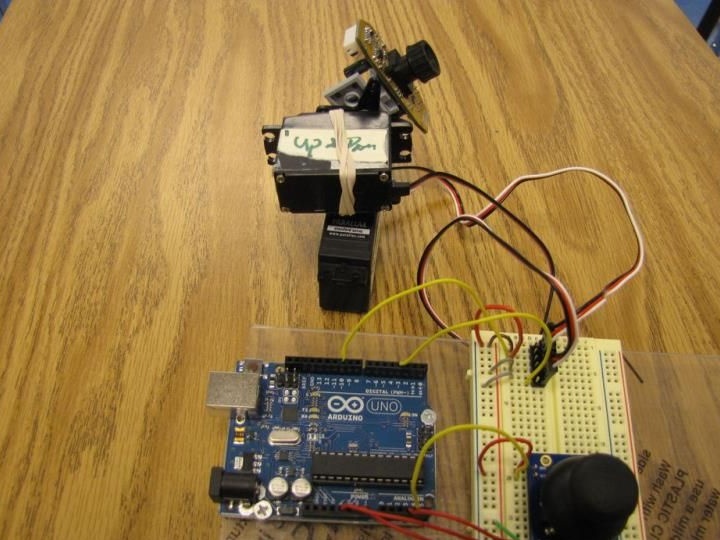
- Ein Gerät zur Verfolgung der Bewegung von Servomotoren (eine kaputte Webcam und Legowürfel werden verwendet).
Selbst gemachter Montageprozess:
Erster Schritt. Wir verbinden Servomotoren
Der hausgemachte Montageprozess beginnt mit dem Anschließen der Servomotoren. Um ein vorläufiges Layout zusammenzustellen, wird eine Leiterplatte verwendet. Dann ist es möglich, einen separaten Schild herzustellen. In der Abbildung sehen Sie, wie genau alles miteinander verbunden ist.
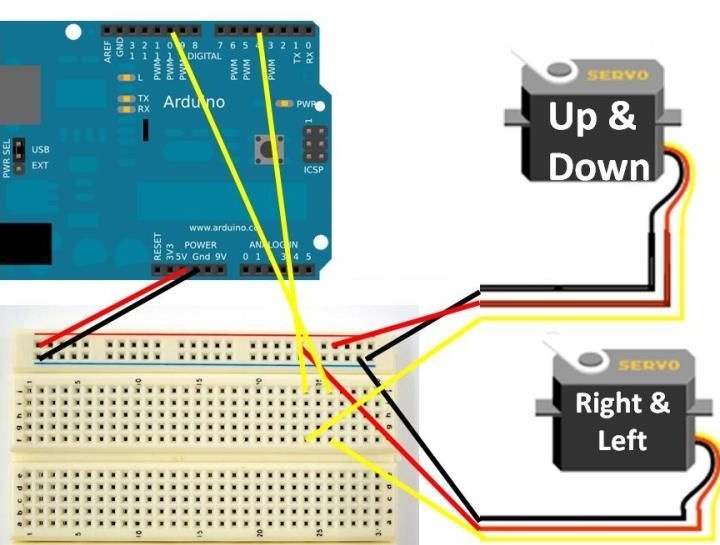
Das rote Kabel ist die Stromversorgung und wird an den 5-V-Pin des Arduino-Controllers angeschlossen.
Das schwarze Kabel ist ein Minus (Masse) und wird mit dem Arduino-Ausgang namens GND verbunden.
Das gelbe Kabel vom rechten und linken Servomotor muss an Pin 11 angeschlossen werden. Bei einigen Modellen kann es weiß sein.
Ein ähnliches gelbes Auf- und Ab-Kabel muss an Pin 4 angeschlossen werden. Bei einigen Motormodellen kann es auch weiß sein.
Es ist wichtig zu beachten, dass die zur Steuerung des Motors verwendeten Signalanschlüsse von den PWM-Ausgängen stammen.
Schritt zwei Schließen Sie den Joystick an
Wie der Joystick angeschlossen ist, ist auf dem Bild zu sehen. Auf den ersten Blick mag das Schema ziemlich kompliziert erscheinen, aber tatsächlich gibt es hier nichts Kompliziertes. Wie bei Motoren wird hier eine Leiterplatte verwendet.
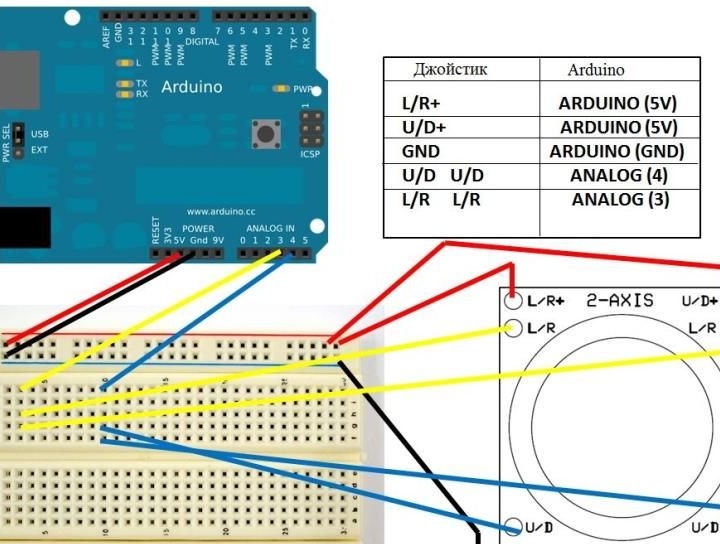
1. Auf dem Joystick-Modul finden Sie die Ausgänge U / R + und L / R +. Über diese Ausgänge wird die Stromversorgung angeschlossen. Dementsprechend müssen Sie eine Spannung von +5 V vom entsprechenden Pin an das Arduino anlegen.
2. Unter dem Joystick befinden sich außerdem zwei Anschlüsse mit der Bezeichnung L / R und zwei U / D-Anschlüsse. Sie müssen an die Analogausgänge A3 und A4 angeschlossen werden.
3. Nun, abschließend muss die Erde am Joystick mit der Erde am Arduino verbunden werden.
Nach dem Zusammenbau muss die Verbindung noch einmal überprüft werden. Aufgrund von Verbindungsfehlern treten in den meisten Fällen Probleme auf. Dies gilt insbesondere dann, wenn eine Leiterplatte verwendet wird und viele Verbindungen vorhanden sind.
Schritt dreiSkizze für Arduino
Der Code ist sehr einfach und enthält detaillierte Kommentare. Der obige Code muss nur in die Arduino IDE kopiert werden. Sobald der Code geladen ist, sollten sich die Motoren nicht mehr bewegen. Sie sollten sich erst bewegen, wenn die Taste am Joystick gedrückt wird.
Probleme, die auftreten können, und wie man sie löst
1. Wenn sich die Motoren nicht einschalten lassen, überprüfen Sie die Verbindung. PWM-Ausgänge werden zum Anschließen von Motoren und analoge Ausgänge zum Anschließen von Joysticks verwendet.
2. Es kommt vor, dass die Motoren unmittelbar nach dem Laden des Codes zu vibrieren beginnen. Dies passiert, wenn Sie die Pins U / D + L / R + falsch anschließen. Die Verbindung muss sorgfältig geprüft werden. Um die Karte während des Tests nicht zu verbrennen, muss sie vom Computer getrennt werden.
3. Wenn alles erneut überprüft wird, die Motoren jedoch immer noch nicht funktionieren möchten, können Sie versuchen, den Joystick erneut anzuschließen. Es muss von der Leiterplatte entfernt und dann mit etwas Aufwand wieder installiert werden. Joystick-Anschlüsse sollten gut in das Layout passen.
Wenn sich alles herausgestellt hat, können Sie jetzt mit der Steuerung über den Joystick selbstgemachte Elemente erstellen. Sie können beispielsweise einen Roboter herstellen, der mit dem Joystick gesteuert werden kann, und vieles mehr.