

Der Roboter DIY wird ein tolles Spielzeug für Kinder sein, auch damit können Sie Verwandte oder Freunde spielen. Das Wesen des Roboters ist wie folgt. Es ist eine Box mit einem Schalter. Sobald jemand auf einen Schalter einer Box klickt, beginnt sich eine Tür zu öffnen, aus der eine Hand herauskommt und den Schalter wieder in seinen ursprünglichen Zustand versetzt. Trotz der äußeren Einfachheit des Roboters sieht das alles ziemlich lustig aus.
Die Basis für die Erstellung eines Roboters ist eine Schaltung Arduino. Es gibt auch einige mechanische Elemente, die unten diskutiert werden. Lassen Sie uns genauer betrachten, wie dies möglich ist mit seinen eigenen Händen montieren Sie einen solchen Roboter.
Materialien und Werkzeuge für die Herstellung:
- Arduino-Karte, jede mit PWM-Ausgängen reicht aus;
- Servomotoren, zweiteilig (geeignet) das Modell Futaba - S3003, die Leistung eines solchen Motors reicht aus, um die Tür zu öffnen, das Gerät produziert bis zu 3,2 kg / cm Leistung);
- Batterien;
- Schaltertyp SPST oder SPTT;
- einen Schalter zur Steuerung der Batterieleistung;
- Sie benötigen eine Schaltfläche, um Arduino neu zu starten.
- Drähte, Jumper und andere Kleinigkeiten.

Zusätzlich benötigen Sie ein Getriebe (geeignet für ferngesteuerte Autos), eine Platine für einen Elektromotor namens Arduino Motor Shield, einen RC-Servomotor. Diese Komponenten werden benötigt, um die Box wie den Autor in Bewegung zu setzen.
Um den Geräuschpegel während des Betriebs des Geräts zu verringern, werden ein Elektrolytkondensator mit einem Nennwert von 10 mF, ein 10K-Widerstand und ein Wechselrichter 74HC04 benötigt.
Der Herstellungsprozess des Roboters:
Erster Schritt. Wie man eine Box macht
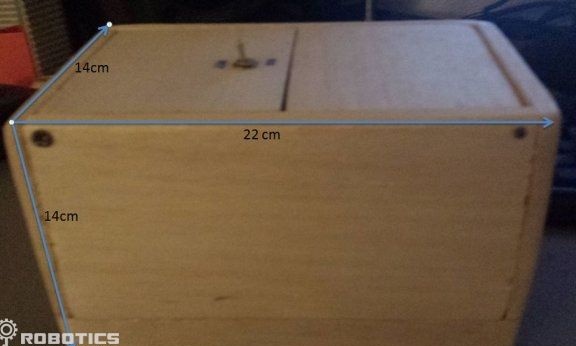
Um eine Box, dh einen Roboterkörper, zu erstellen, müssen Sie Sperrholz oder Kork finden. Zusätzlich benötigen Sie einen starken Kleber zum Kleben von Holz. Es ist wichtig zu verstehen, dass je mehr die Struktur wiegt, desto mehr Energie verbraucht wird. Die Größe der Box beträgt 22 cm x 14 cm x 14 cm.
Schritt zwei Schematische Darstellung e Teile
Die Oberseite des Roboters enthält eine Arduino-Hauptplatine, zwei Servos und einen Schalter. Die Schaltung, die für das Rauschen verantwortlich ist, kann durch einen normalen Widerstand ersetzt werden.
Servoantriebe werden über den fünften Pin der Arduino-Platine mit Strom versorgt. Die Signaldrähte sind mit den Kontakten 9 und 10 verbunden. Dank dieser PWM-Kontakte wird der Drehwinkel der Servomotoren gesteuert. Dies ist ein Winkel von 0 bis 180 Grad.
Der rote Knopf wird benötigt, um das Arduino neu zu starten.
Am unteren Ende der Schaltung befindet sich die Arduino-Motorabschirmung.Auf der Platine sehen Sie zwei Kanäle, A und B, dank ihnen können Sie auf Wunsch zwei Motoren gleichzeitig anschließen. Die Hauptaufgabe dieses Boards ist, dass Sie damit programmgesteuert die Drehzahl, Richtung und Pausen für jeden Kanal der Motoren einstellen können. Wenn Sie sich das Diagramm ansehen, wird Kanal B verwendet, während Kontakt 13 die Richtung bestimmt, Kontakt 11 die Geschwindigkeit ist und Kontakt 8 zur Steuerung der Bremsen verwendet wird.
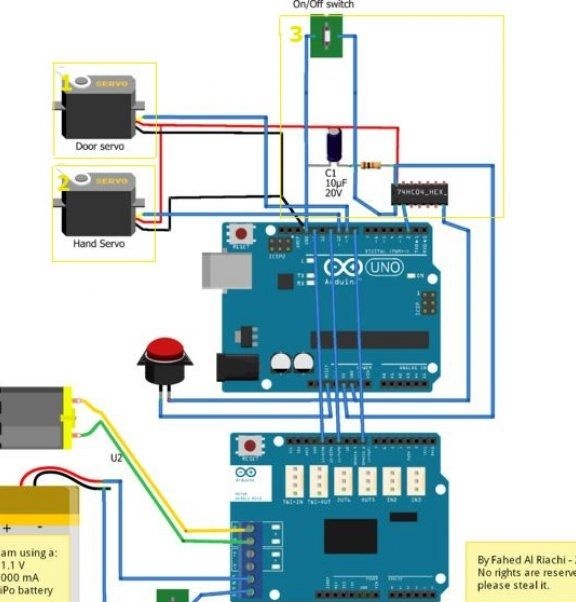
Die Stromquelle ist eine 11,1 / 1000-mA-Batterie, die an die Abschirmung des Arduino-Motorschilds angeschlossen wird. Wenn es nicht verwendet wird, wird der Akku direkt an die Hauptplatine angeschlossen.
Schritt drei Motor einbauen
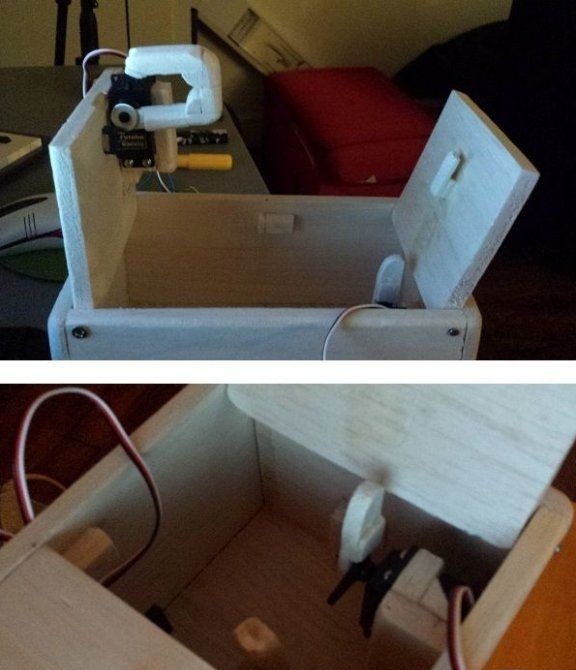
Der Servoantrieb und die Zeiger werden experimentell installiert. Sie müssen in der Praxis überprüfen, ob die Mechanik ordnungsgemäß funktioniert. Um den Abweichungsradius der Motoren zu überprüfen, können Sie das Arduino IDE-Programm verwenden.
Zur Herstellung von handgenommenem Holz jeglicher Art. Hauptsache, es ist leicht, da sonst der Energieverbrauch steigt. Die Größe der Hand wird während der Installation angepasst. Durch Auswahl der gewünschten Länge wird der gewünschte Effekt erzielt.
Der Abdeckungsschieber und die Hand sind so montiert, dass sie den Servomotor während des Betriebs nicht berühren.
Schritt vier Wir verbinden den Servomotor und wechseln zu Arduino
Mit Drähten und Steckbrücken müssen Sie alle elektronischen Elemente gemäß dem angegebenen Schema miteinander verbinden. Die Drähte müssen so verlegt werden, dass sie die beweglichen Elemente des Roboters nicht stören.
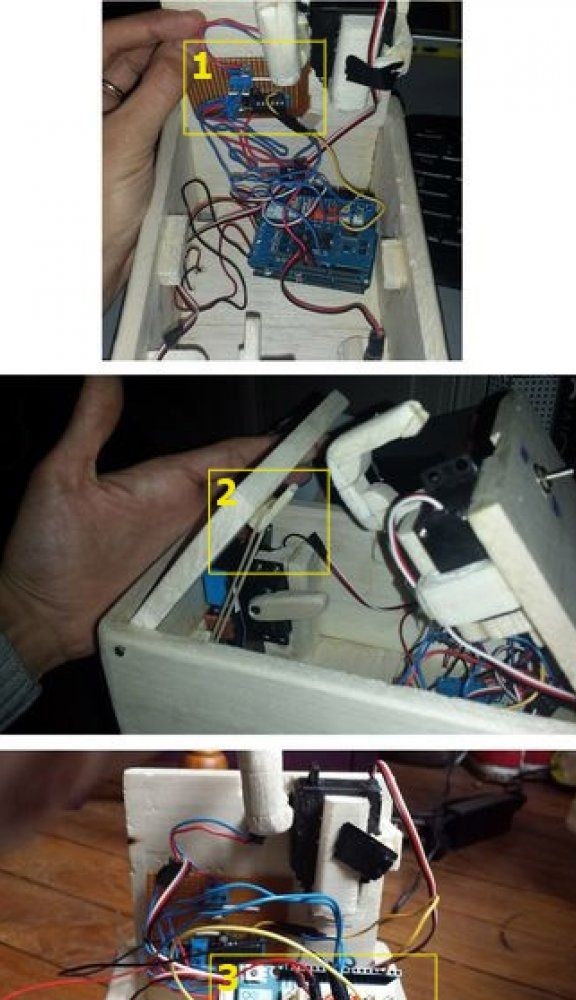
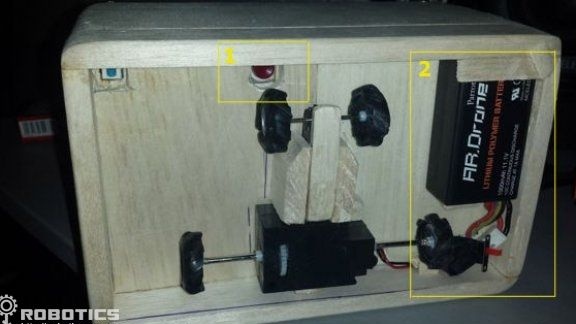
Unter der Nummer 1 können Sie sehen, wie es angeschlossen ist und wo sich der Schaltkreis befindet. Nummer 2 kennzeichnet ein solches Element als Gummiband. Es wird benötigt, damit sich die Tür mit einer gewissen Spannung öffnen kann. Nun, die Nummer 3 zeigt das am Arduino installierte Motorschild an.
Schritt fünf Installation des mechanischen Teils zum Bewegen der Box
Am Boden der Box befinden sich eine Batterie, ein Motor mit Rädern, ein Getriebe, ein Reset-Knopf und ein Kippschalter zur Steuerung der Roboterleistung. Vor dem Anbringen der Elemente müssen Sie das Gleichgewicht des Gewichts der Box berechnen. Damit der Roboter stabil ist, wird zusätzlich zur Vorderachse eine weitere installiert.
Schritt sechs Ein weiteres zusätzliches Feature
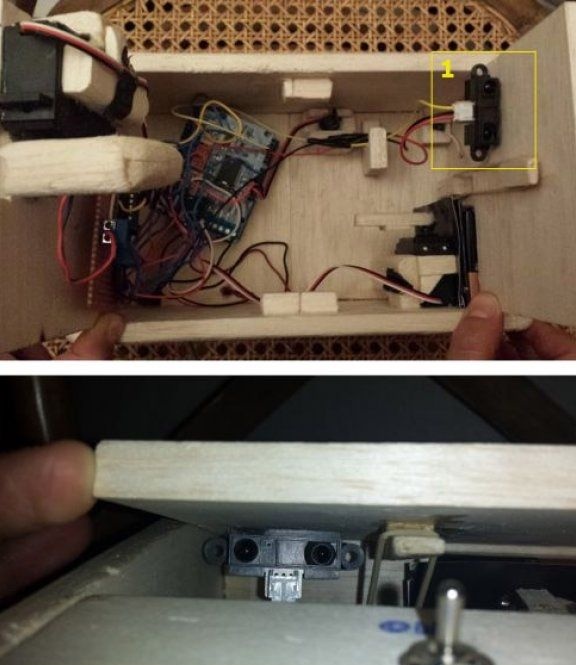
Damit der Roboter die Bewegungsrichtung bestimmen kann, kann er mit einem IR-Sensor ausgestattet werden. Wenn jemand versucht, den Kippschalter zu berühren, bewegt sich die Box gleichzeitig nach rechts und links. Für diese Zwecke ist der GP2Y0A21-Sensor geeignet, er hat drei Drähte. Gelb muss mit dem dritten Pin von Arduino verbunden sein, Rot mit Pin 5 und Schwarz mit Masse.
Das ist alles, ein einfacher und gleichzeitig lustiger Roboter ist bereit. Ein solches Spielzeug wird nicht nur dem Kind Freude bereiten, sondern auch viele Erwachsene überraschen.
Firmware: