
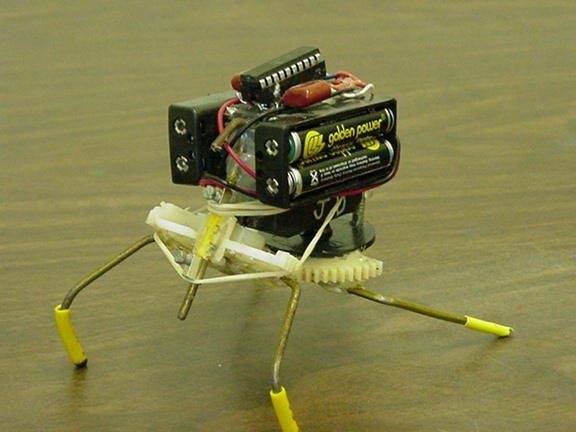
Es gibt nichts Interessanteres als einen Laufroboter, weil so der Roboter ahmt die besten Lebewesen nach, die mit uns auf unserem Planeten leben. Einen solchen Roboter herzustellen ist nicht schwierig, aber Sie müssen einen Wunsch und einige Fähigkeiten auf dem Gebiet der Elektronik haben.
Materialien und Werkzeuge:
- ein Stück Kupferdraht;
- zwei Halter von Fingerbatterien;
- zwei monolithische Keramikkondensatoren von jeweils 0,22 mF;
- ein 3,3 M Widerstand;
- 74NST240 Oktal-Inverter-Chip für acht Kanäle (einer);
- 20-poliges DIP 74XX240 oder 74XX245 (eins);
- Servomotor (einer);
- wechseln;
- ein Kunststoffzahnrad;
- Kabelstecker.
Herstellungsprozess:
Erster Schritt. Vorbereitung der Ausrüstung
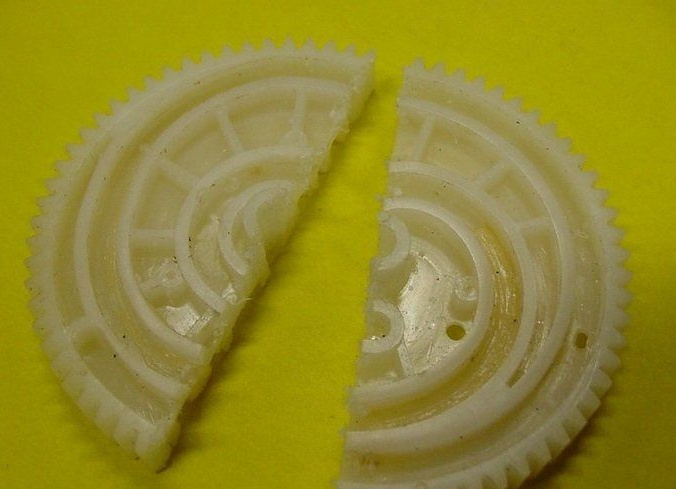
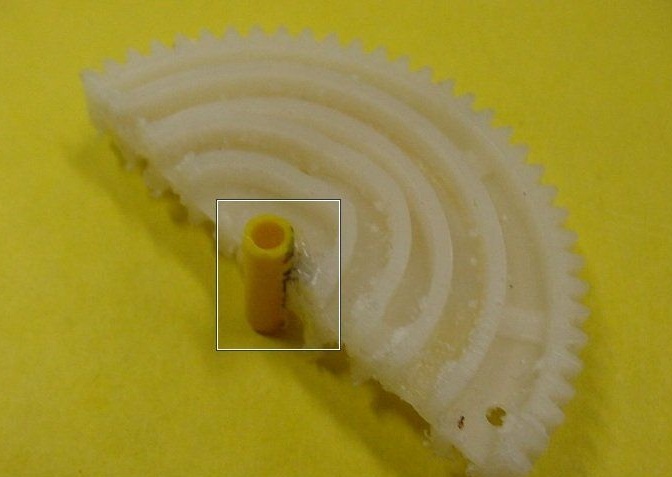
Sie müssen das Kunststoffzahnrad nehmen und in zwei identische Teile schneiden. Dann müssen Sie das Horn entfernen und mit Klebstoff an einem Halbkreis befestigen.

Schritt zwei Änderung des Motors
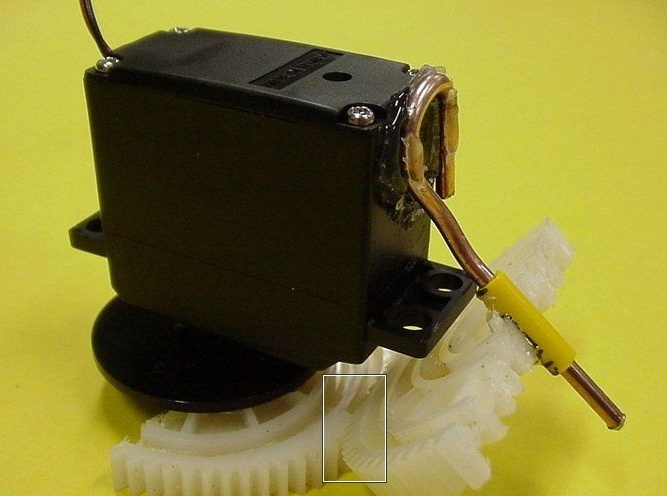
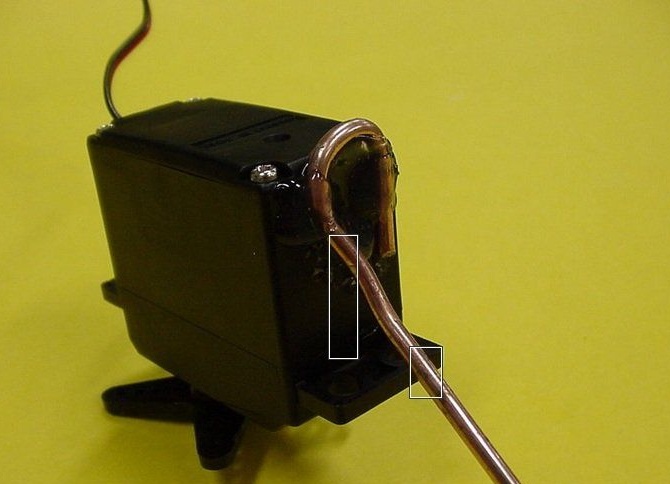
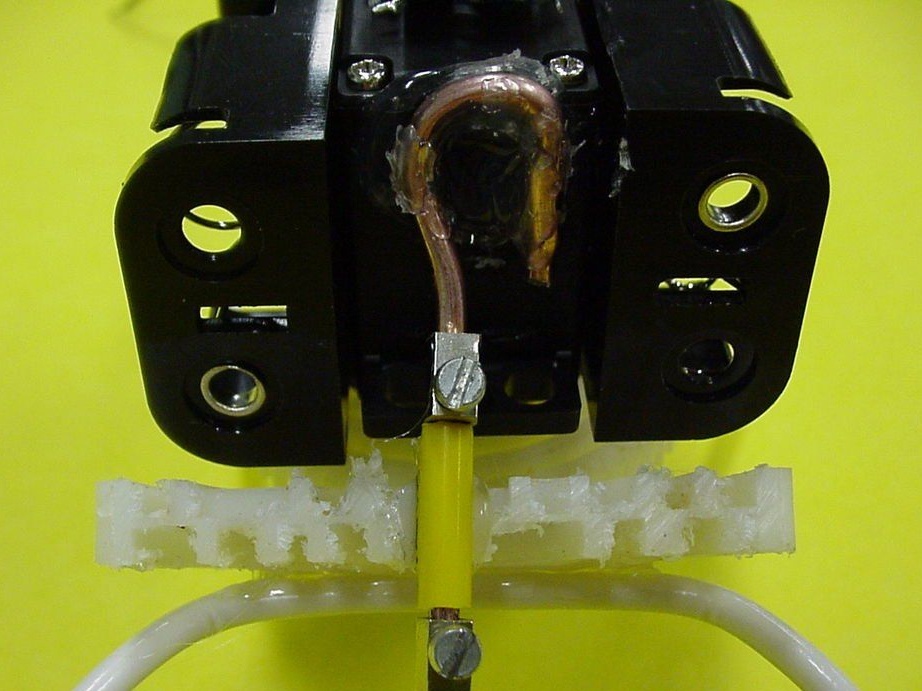
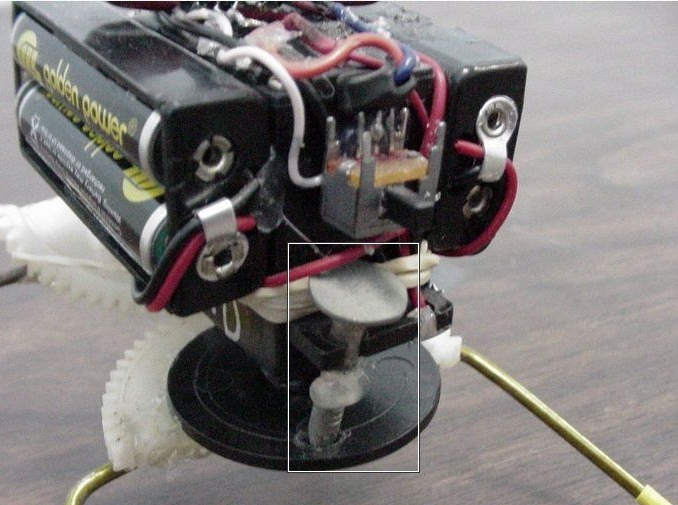
Der Servomotor muss erneuert werden, damit er nur bei Drehung funktioniert. Dann müssen Sie den Kupferdraht wie in der Abbildung gezeigt darauf kleben.
Auch in diesem Stadium benötigen Sie ein Kunststoffrohr mit geeignetem Durchmesser, das auf den Halbkreis geklebt werden muss. Das Servomotorhorn wird anschließend an seiner ursprünglichen Stelle platziert. Dann legen Sie ein Plastikrohr auf den Kupferdraht. In dieser Phase kann die Arbeit als abgeschlossen betrachtet werden.

Schritt drei Roboterpfoten erstellen und installieren
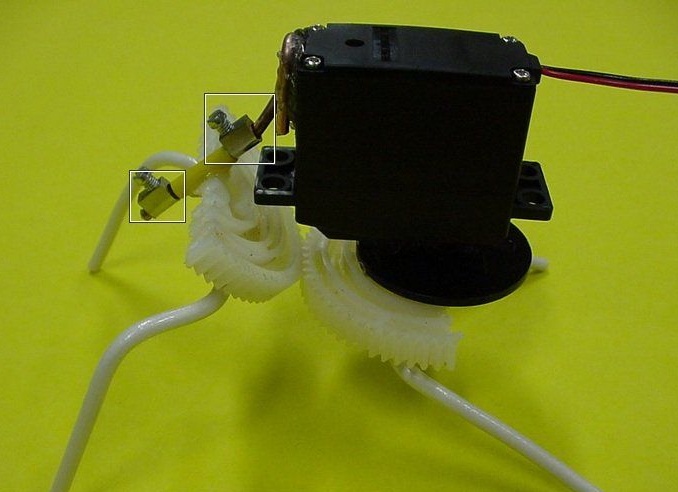
Kupferdraht wird als Beine verwendet, er muss wie in der Abbildung gezeigt gebogen werden. Dann klebt der Autor die Pfoten auf die Halbkreise. Sie können jetzt auch Batteriehalter am Servomotor anbringen.


Schritt vier Arbeit mit Elektronik
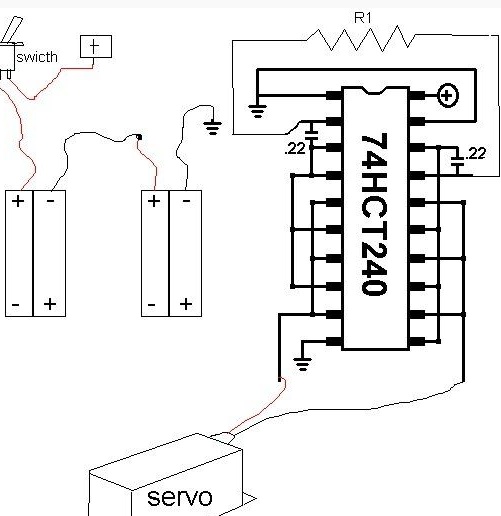
Vielleicht ist dies der schwierigste und entscheidende Moment. Das gesamte System muss wie in der Abbildung angegeben klar angeschlossen sein. Unmittelbar nach dem Anschließen ist der Roboter bereit und kann getestet werden.

Durch Ändern des Winkels der Beine können Sie verschiedene Eigenschaften des Roboters erzielen. Sie können es schneller oder langsamer machen. Sie können den Roboter auch mit zusätzlichen Steuerelementen ausstatten, z. B. einem Schnurrbart, mit dem er das Hindernis bestimmt. Sie können einen Roboter auch mit Augen in Form von LEDs ausstatten, wodurch die Ähnlichkeit eines Lebewesens noch realistischer wird.
Sie müssen einen solchen Roboter auf einer ebenen Fläche laufen lassen. Um ein Verrutschen seiner Beine zu verhindern, können Cambrices an ihren Enden getragen werden.