

Einen solchen Roboter mit eigenen Händen herzustellen, wird überhaupt nicht schwierig und sogar interessant sein. Das Ergebnis ist ein sehr interessantes Gerät, das sich wie ein Lebewesen verhält. All dies dank zweier kleiner Motoren, die den Roboter antreiben. Durch Ändern des Anstellwinkels der Motorwellen können Sie den Roboter schneller oder langsamer machen. Sie können auch mit verschiedenen Spitzen experimentieren, die auf der Motorwelle getragen werden können.
Materialien und Werkzeuge:
- zwei kleine Motoren (3 Volt, in Kinderspielzeug enthalten);
- Batteriehalter (Sie können es selbst machen oder aus der alten Fernbedienung, Taschenlampe usw. herausziehen);
- zwei Schalter vom Typ SPDT (sie können von einer alten Computermaus bezogen werden);
- zwei kleine und eine große Büroklammer;
- ein kleines Rad aus dem Spielzeug;
- dünne Verkabelung

Herstellungsprozess:
Erster Schritt. Lötverdrahtung
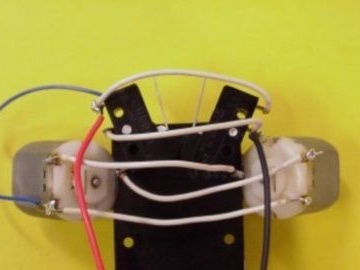
Zunächst müssen Sie die Drähte vorbereiten und an alle elektronischen Komponenten anlöten, damit Sie später die Knoten bequem anschließen können. Die Drähte müssen auf eine Länge von 6 cm zugeschnitten und ca. 1 cm von ihren Enden entfernt werden. Jetzt müssen Sie zwei Drähte an die Motoren und die Schalter anlöten. Vergessen Sie auch nicht, die beiden Drähte an die Kontakte des Batteriehalters anzulöten. Andere Enden der Drähte sind vorzugsweise verzinnt.

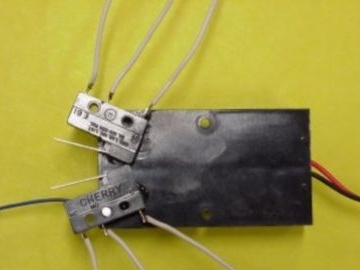
Schritt zwei Schalter einstellen
Zum Einstellen der Schalter muss der Batteriehalter auf den Kopf gestellt werden. Jetzt müssen Sie die Schalter mit Klebstoff auf den Batteriehalter kleben. Infolgedessen sollte sich der Buchstabe V bilden.
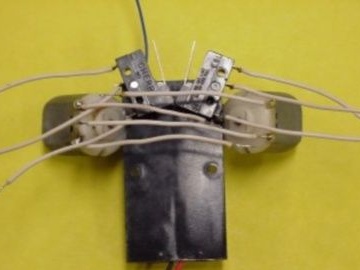
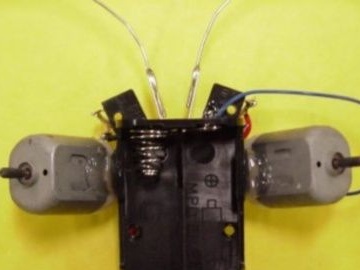
Schritt drei Motor einbauen
Die Motoren müssen in einem Winkel am Batteriehalter angebracht werden, wie in der Abbildung gezeigt. Andernfalls müssen die Winkel auf beiden Seiten gleich sein der Roboter wird nicht richtig funktionieren. Die Motorwellen müssen an der Straße anliegen. Motoren können mit Klebstoff montiert werden.

Schritt vier Einbau des Stabilisatorrades
Der Stabilisator wird benötigt, um hausgemacht stand flach auf der Straße. Um ein Rad herzustellen, können Sie eine Walze von einem Kassettenrekorder oder ein Rad von einem Kinderspielzeug verwenden. Der „Stecker“ besteht aus einer langen Büroklammer oder Schnur.Zusammenfassend haftet der Stabilisator gleichmäßig am Batteriehalter.

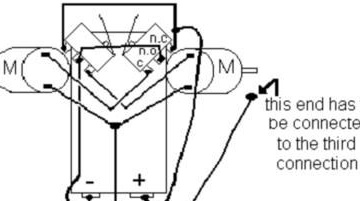
Schritt fünf Kabelverbindung
Damit der Roboter ordnungsgemäß funktioniert, müssen alle Drähte gemäß dem Schema eindeutig angeschlossen sein. Die Schaltung ist auf dem Bild zu sehen.

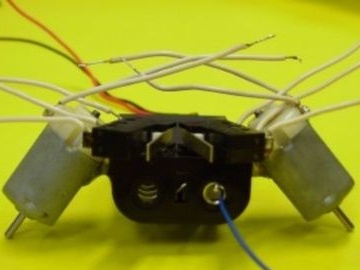
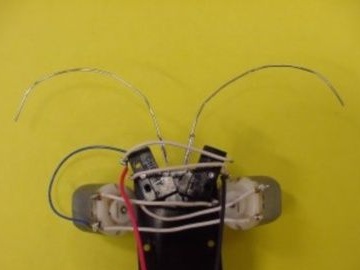
Schritt sechs Einen Schnurrbart für den Fehler machen
Der Schnurrbart dient als Rad für den Käfer. Sobald sich ein Hindernis auf seinem Weg trifft, schaltet der Schnurrbart die Schalter ein und die Motoren drehen den Roboter in eine andere Richtung. Wenn der Schalter aktiviert ist, schaltet sich einer der Motoren aus und eine Art Differential wird ausgelöst. Wenn beide Schalter aktiviert sind, stoppt der Roboter vollständig. Der Schnurrbart besteht aus kleinen Büroklammern, die sorgfältig auf die Knöpfe der Schalter geklebt werden müssen.

Siebter Schritt. Endgültige Überarbeitung und Prüfung des Roboters
In der letzten Phase müssen Gummispitzen auf den Motorwellen installiert werden, sie werden für einen besseren Halt benötigt. Sie können aus Kambrium hergestellt werden.
Das ist alles, der Roboter ist bereit. Sie müssen es auf einer glatten Oberfläche ausführen, z. B. auf einem Tisch oder Linoleum. Da die Pfoten des Käfers zu klein sind, kriecht er nicht über den Teppich, dazu müssen die Spitzen auf den Motorwellen vergrößert werden.
In Zukunft kann der Roboter nach eigenem Ermessen aufgerüstet werden. Zum Beispiel kann er LED-Augen herstellen, die bei Kontakt mit einem Hindernis aufleuchten.