
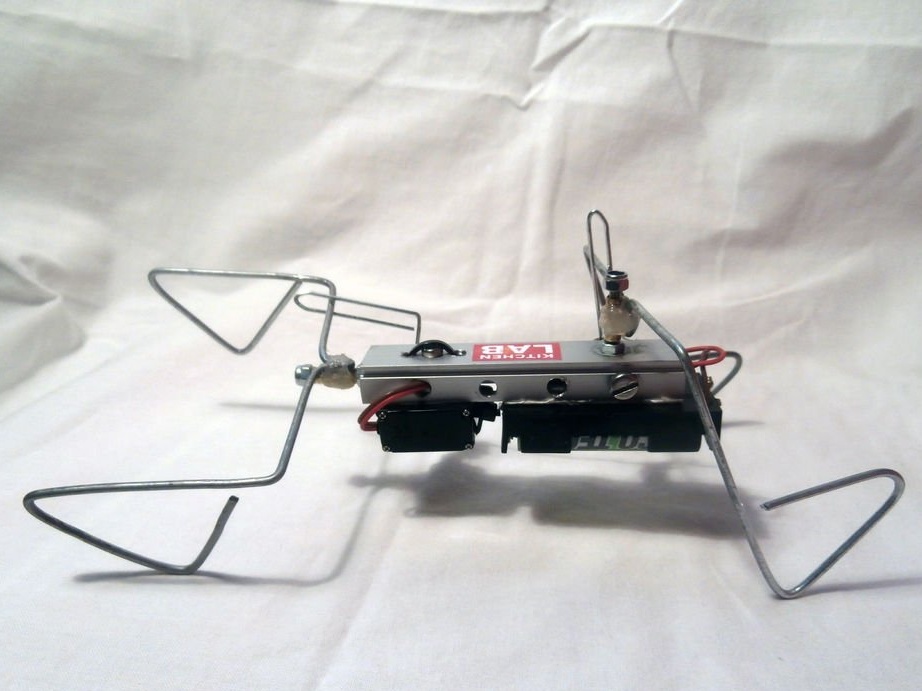
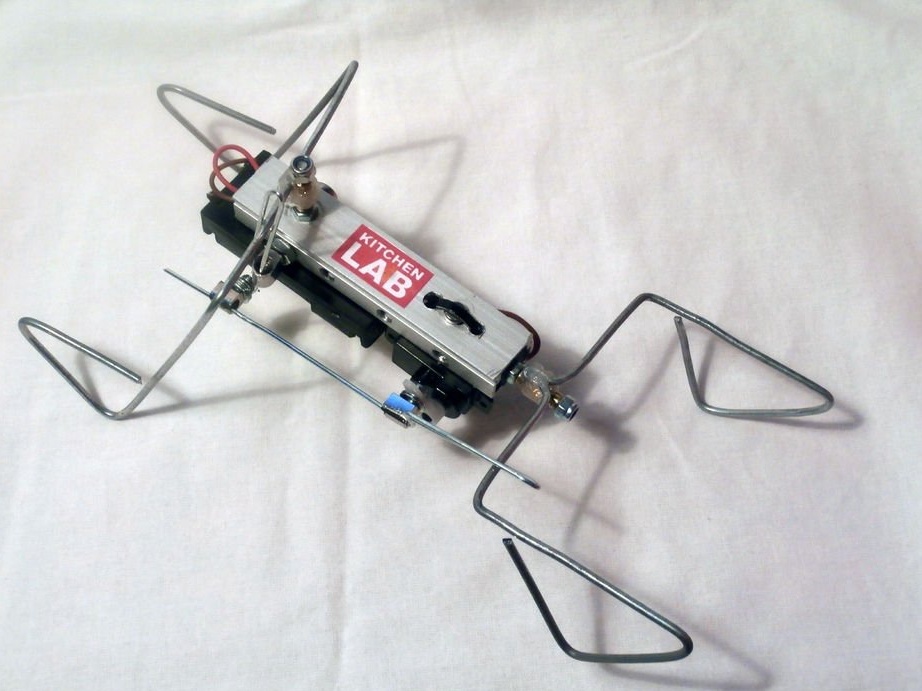
Hallo allerseits! Ich war inspiriert, meinen BEAM-Roboter zu entwickeln, nachdem ich im Internet genug von solchen einmotorigen und zweimotorigen Wundern der Robotik gesehen hatte. Die Idee war, einen Laufroboter zu entwickeln, der auf die gleiche Weise wie BEAM-Walker mit 1 oder 2 Motoren läuft. Nach mehreren erfolglosen Experimenten habe ich getan, was ich wollte!
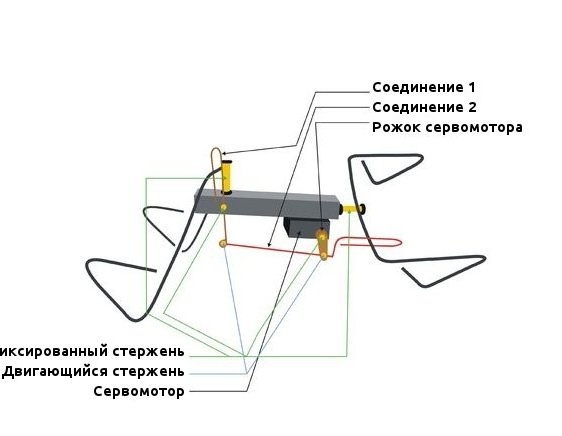
Schritt 1: Der Mechanismus
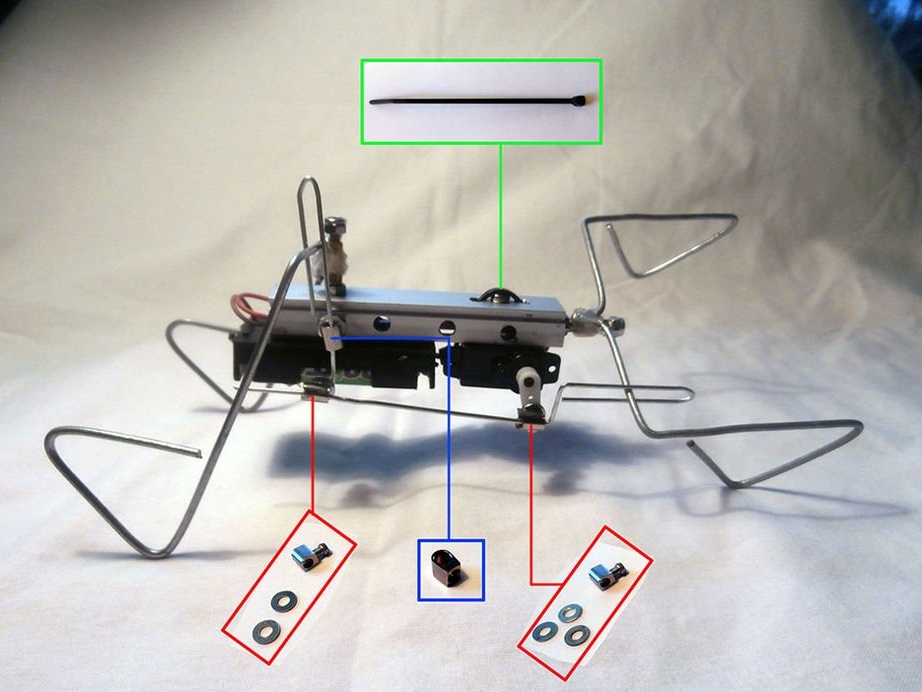
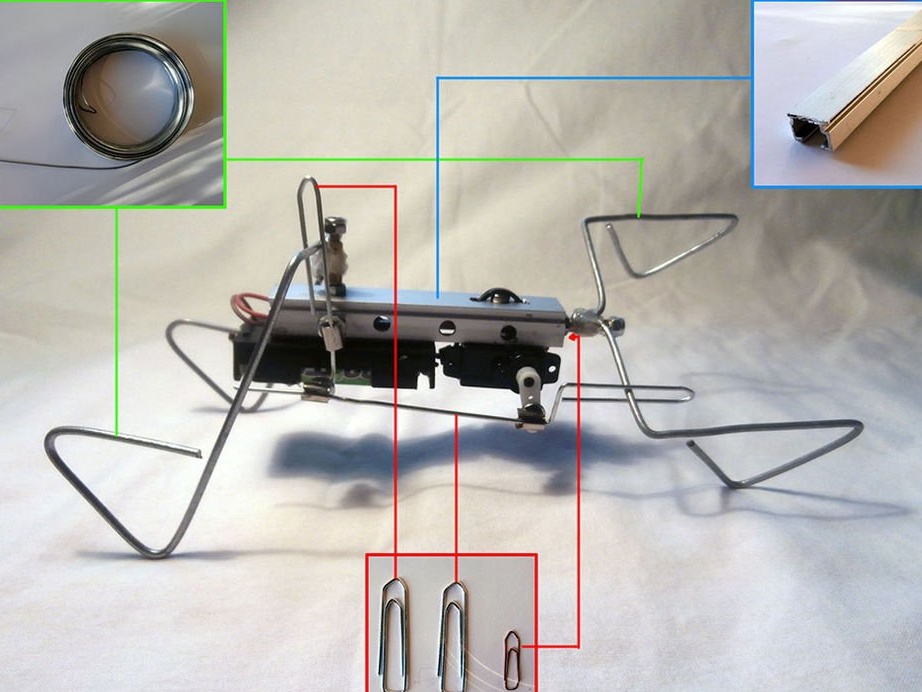
Schritt 2: Erforderliche Teile

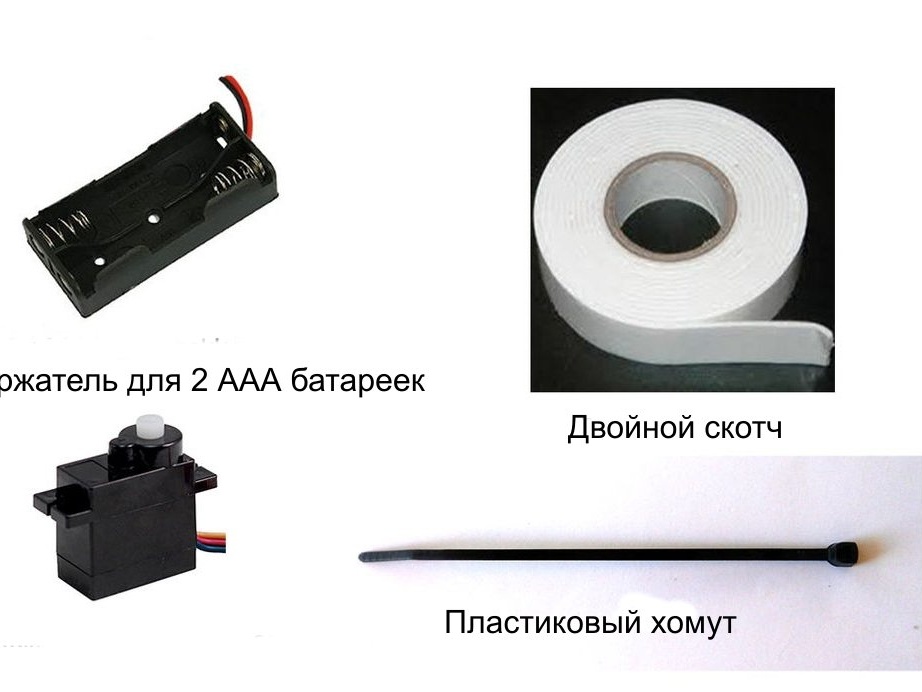



(1x) Servo mit kontinuierlicher Rotation
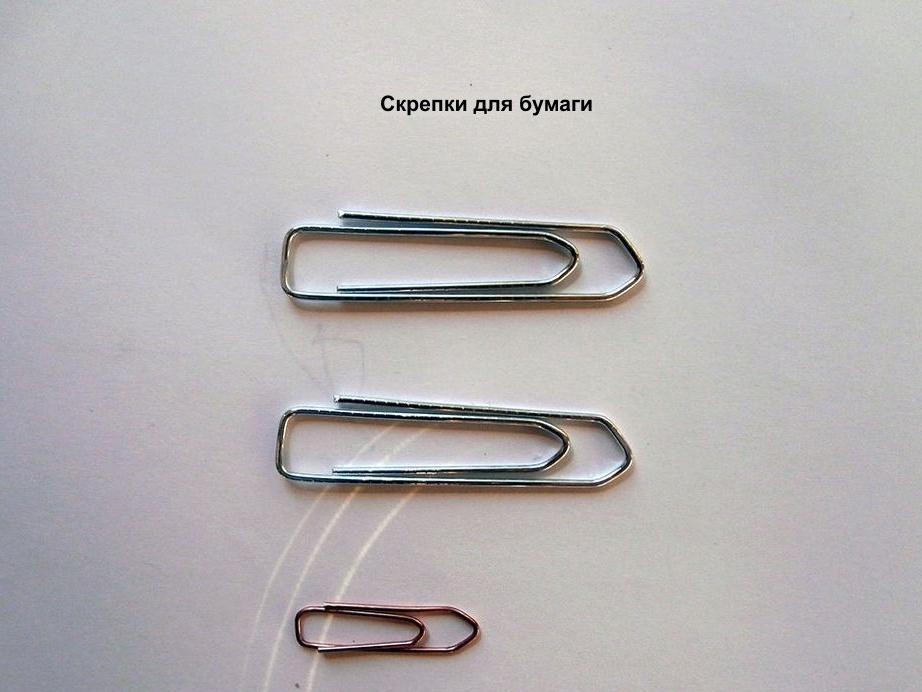
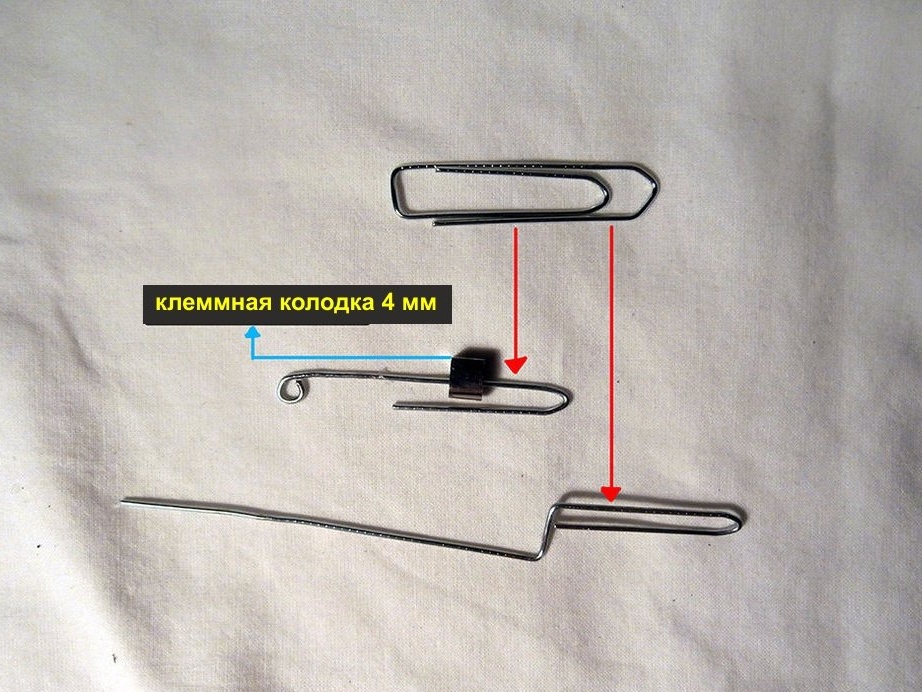
(2x) große Büroklammern
(1x) kleine Büroklammer
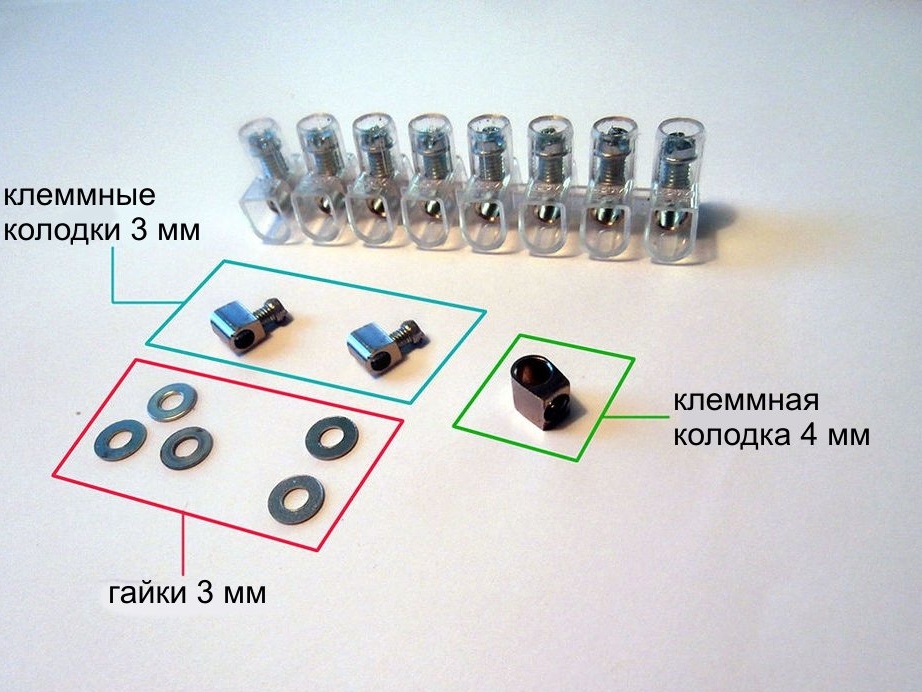
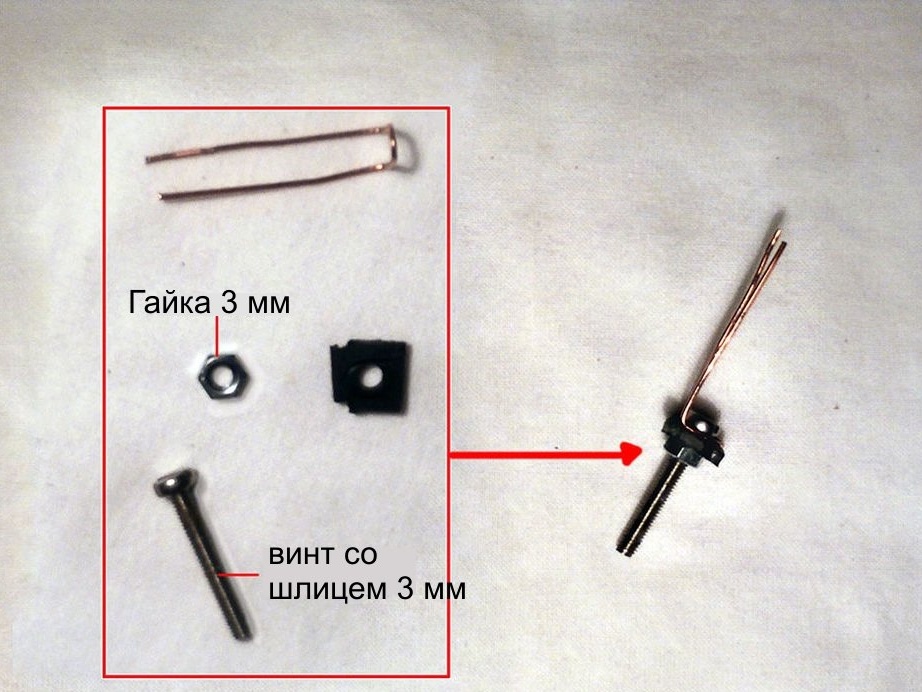
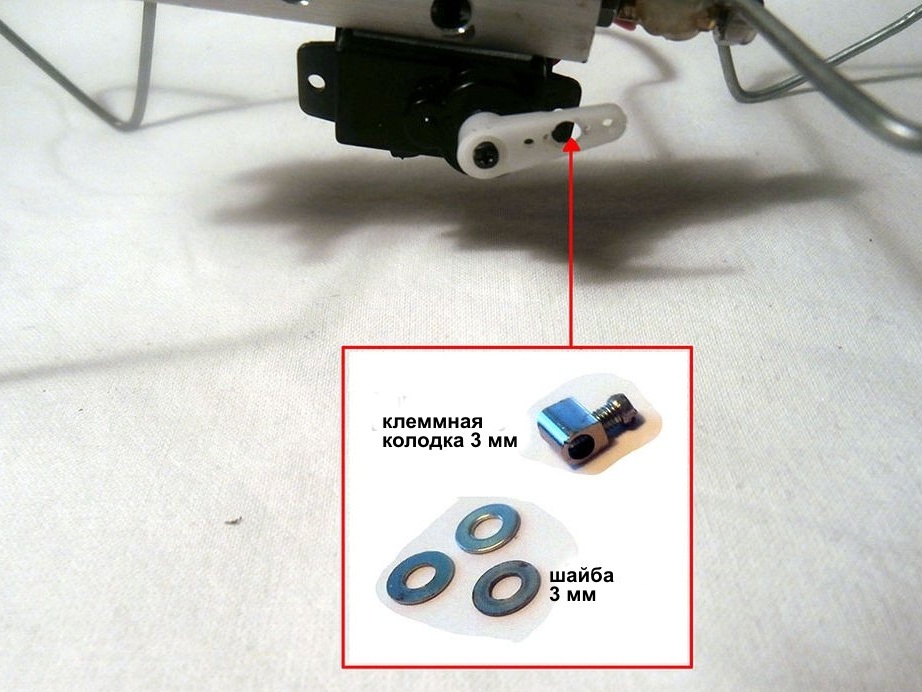
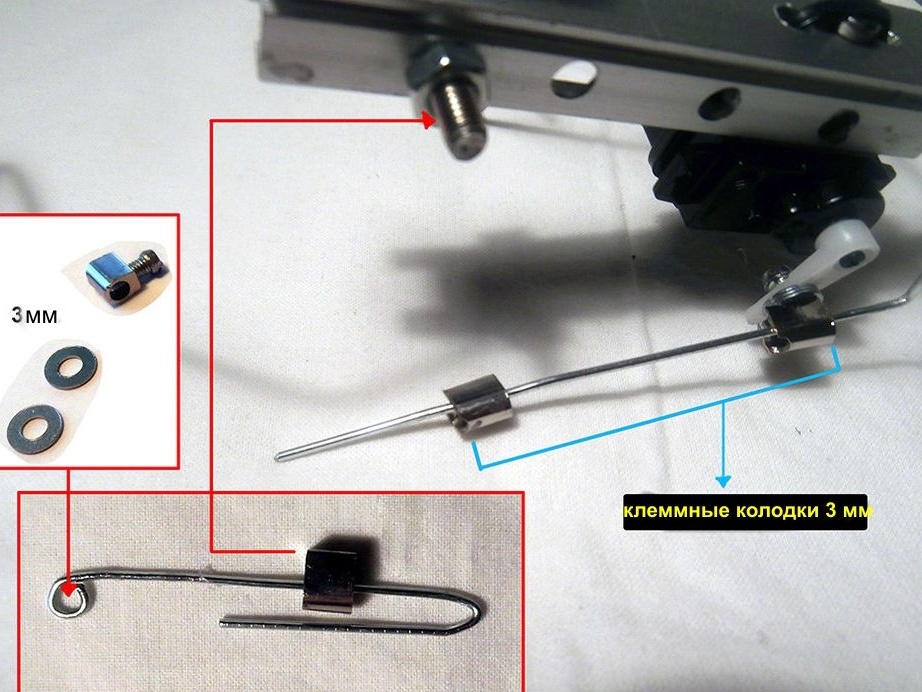
(2x) Klemmenblöcke (3 mm)
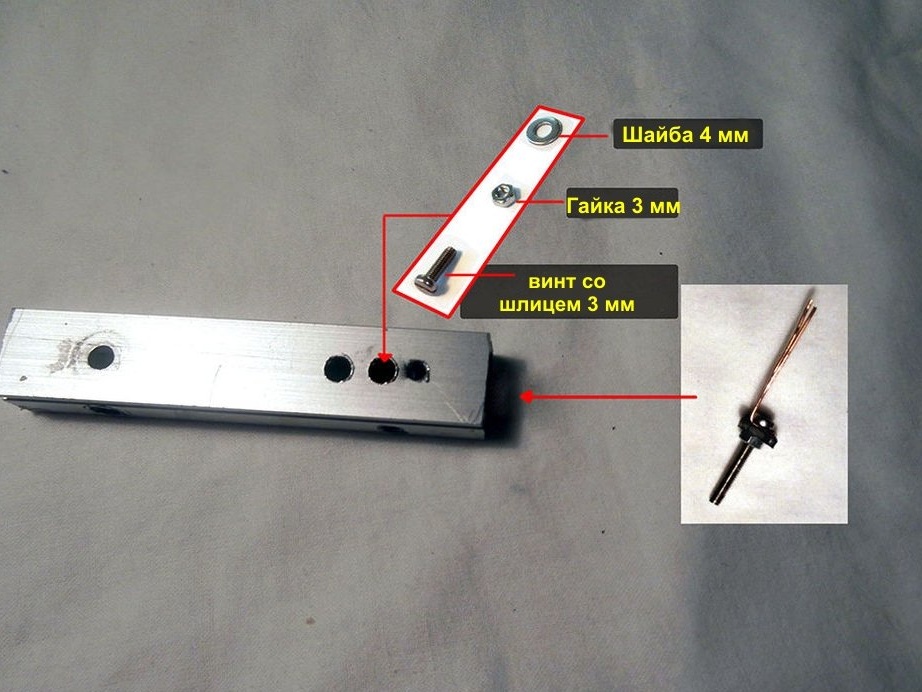
(1x) Klemmenblöcke (4 mm)
(1X) Gebrauchter Aluminiumprofilblock
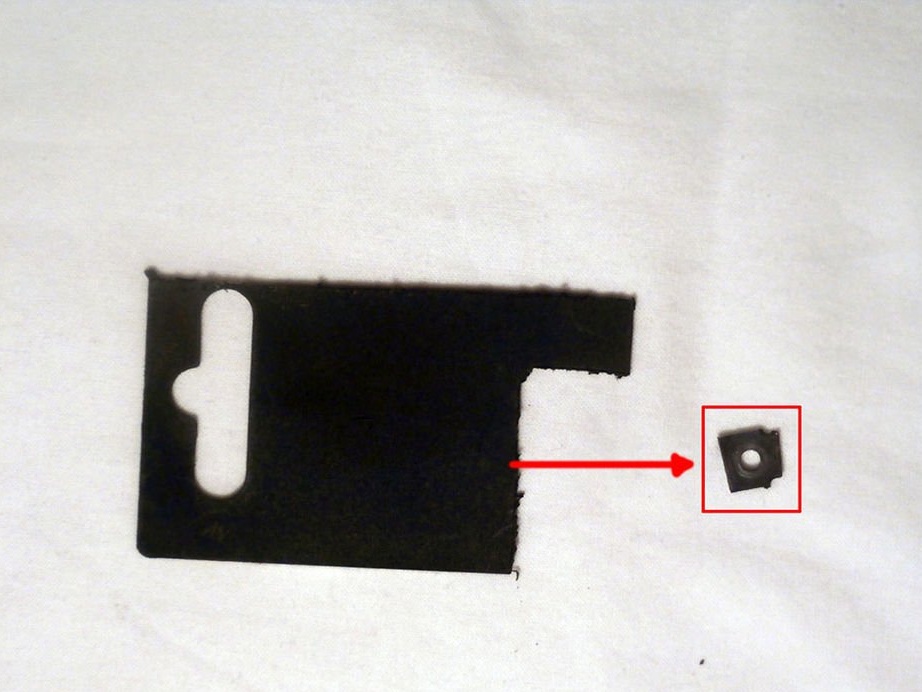
(1X) Stück Plastik
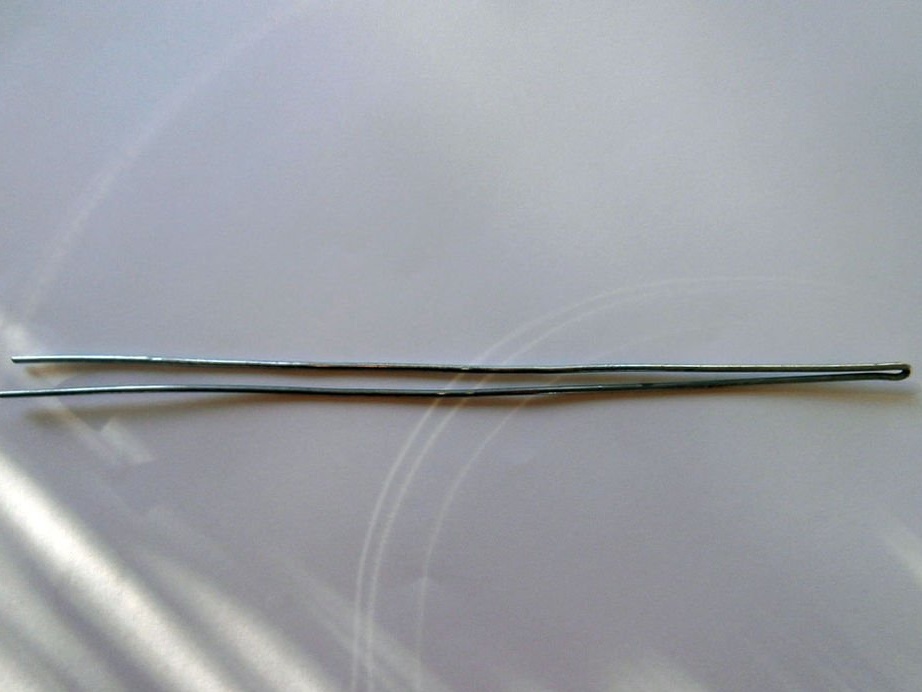
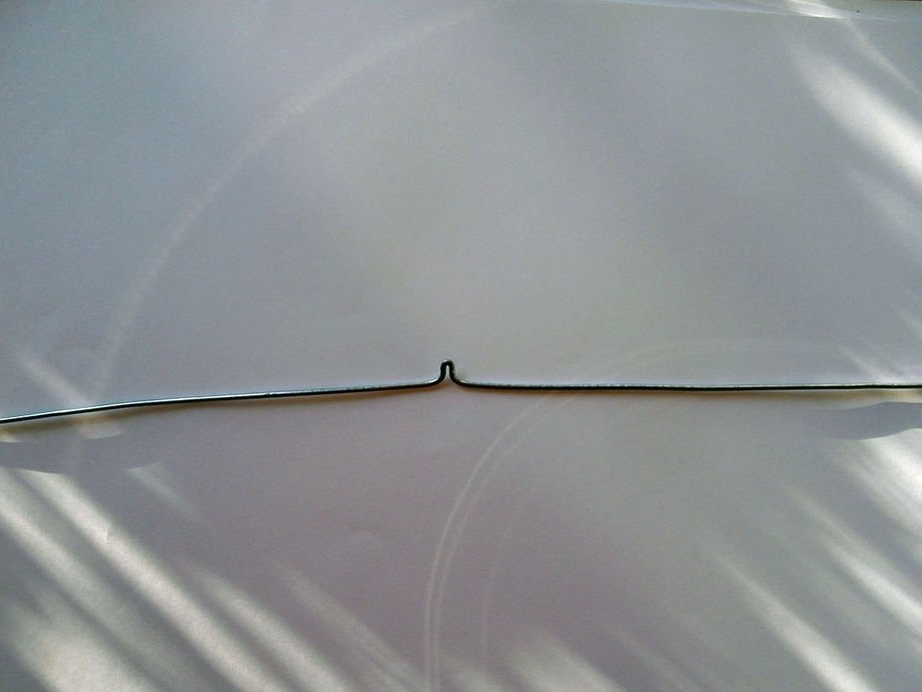
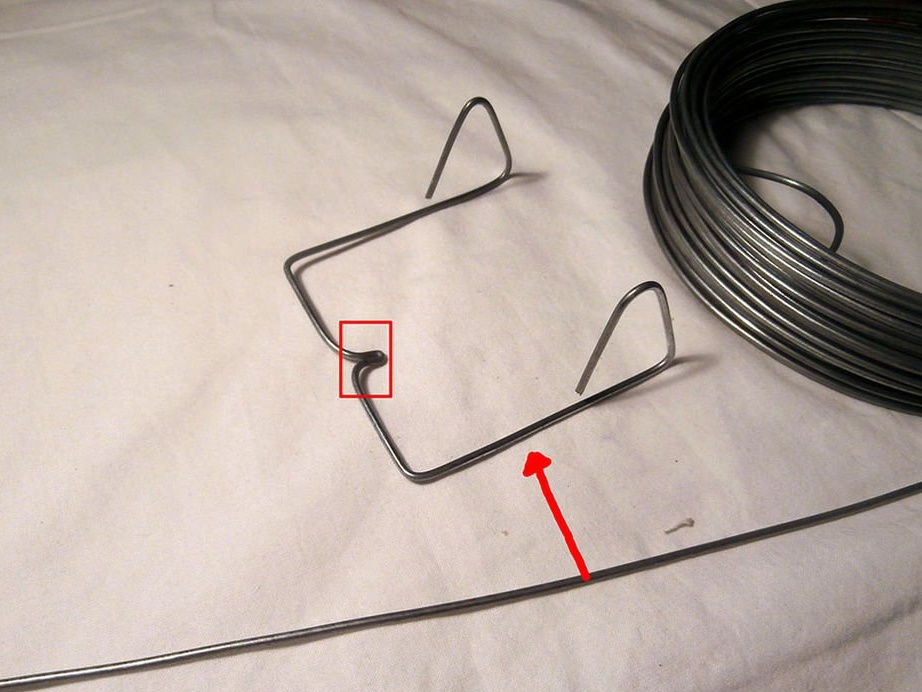
Stahldraht (2 mm)
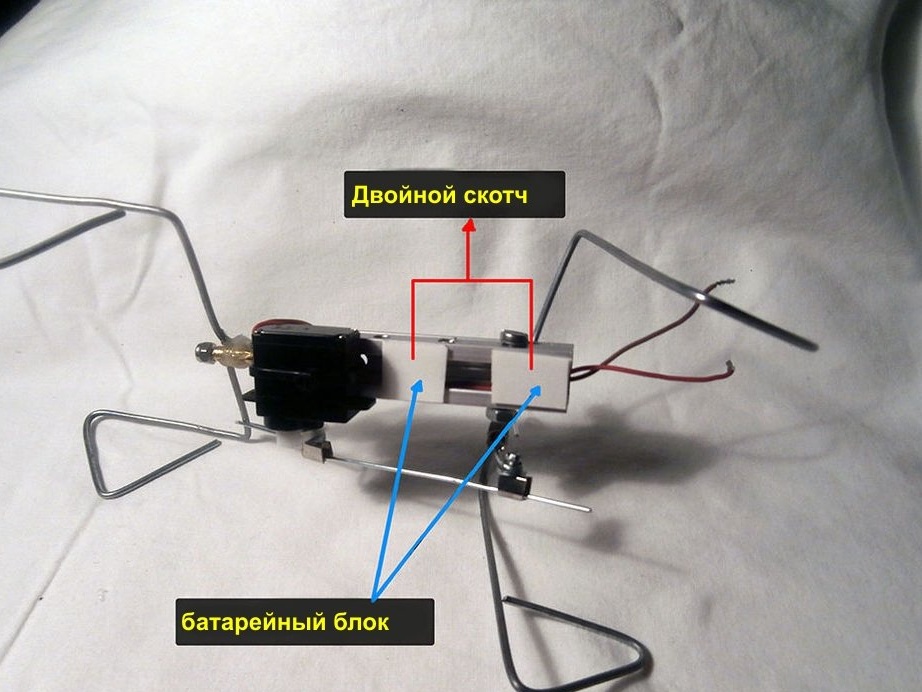
Doppelklebeband
Messingrohr
(1X) kleine Klammer
(1X) Akku (2 x AAA)
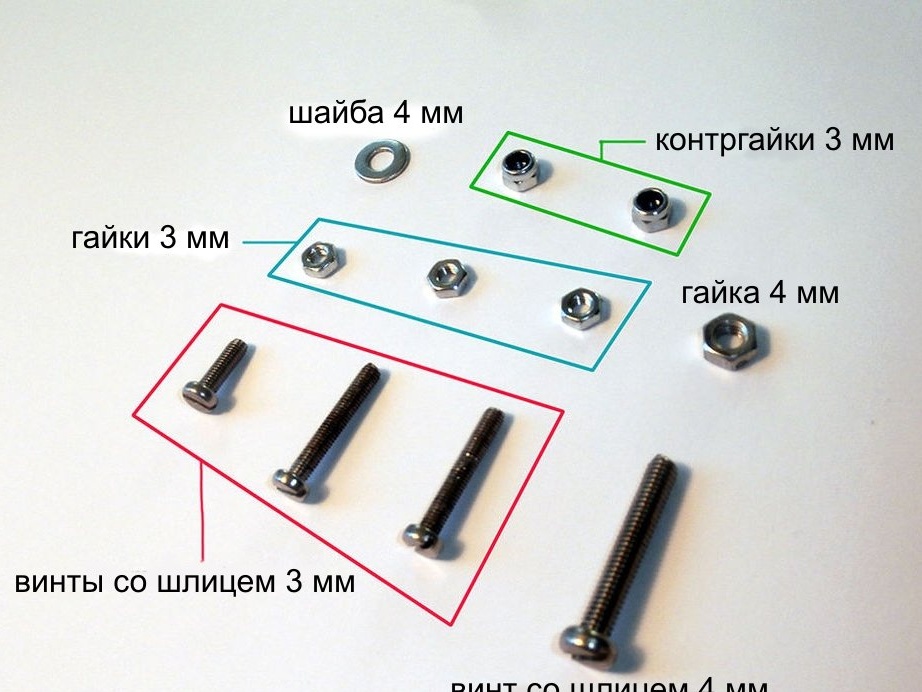
(2X) Kontermuttern (3 mm)
(3X) Muttern und Schrauben (3 mm)
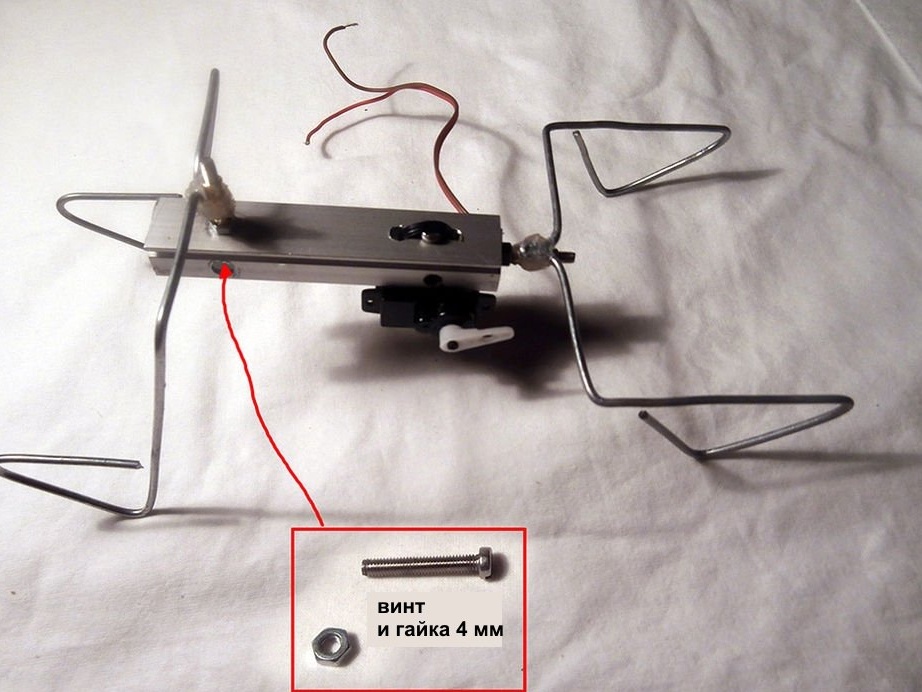
(1x) Schrauben und Muttern (4 mm)
(5x) Unterlegscheibe (3 mm)
(1X) Unterlegscheibe (4 mm)
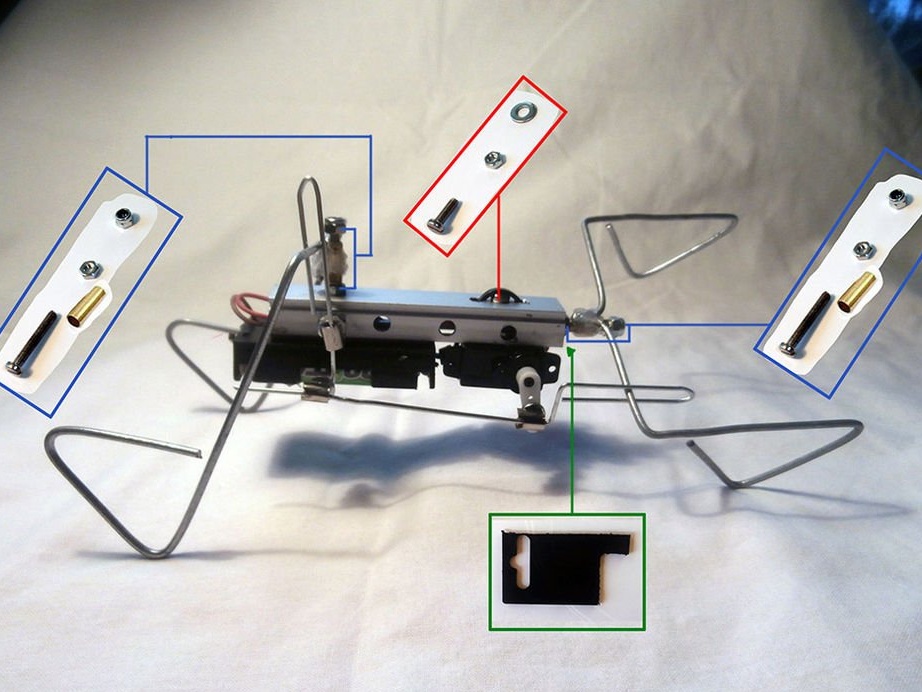
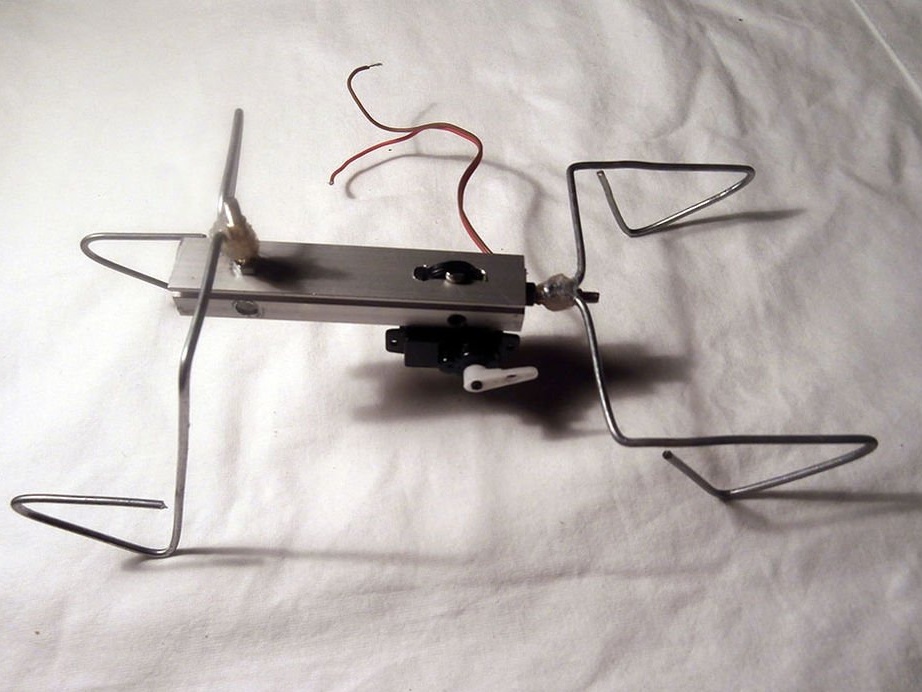
Schritt 3: Teile zusammenbauen
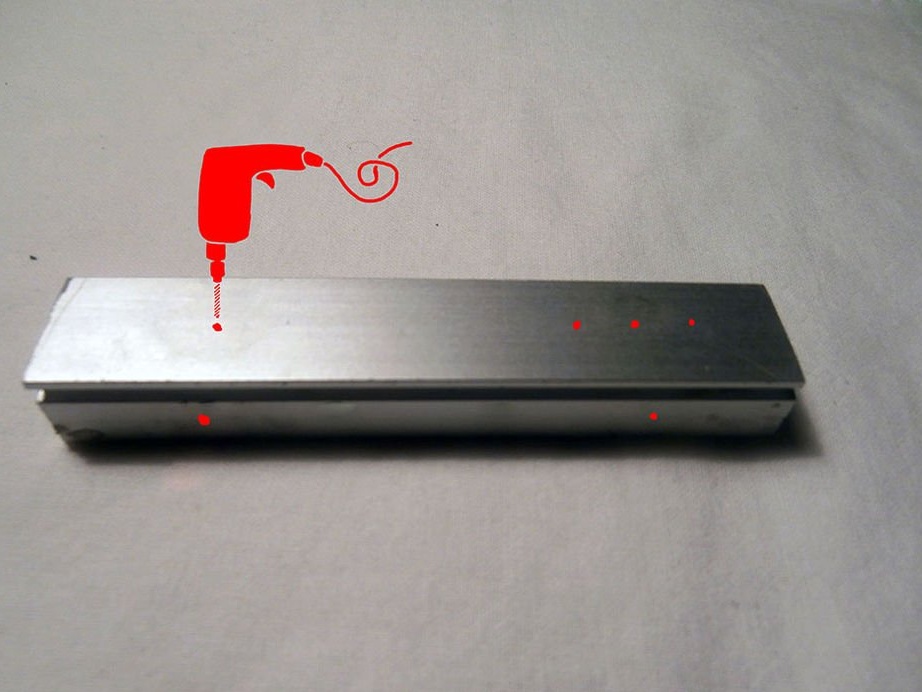
Schritt 4: Werkzeuge
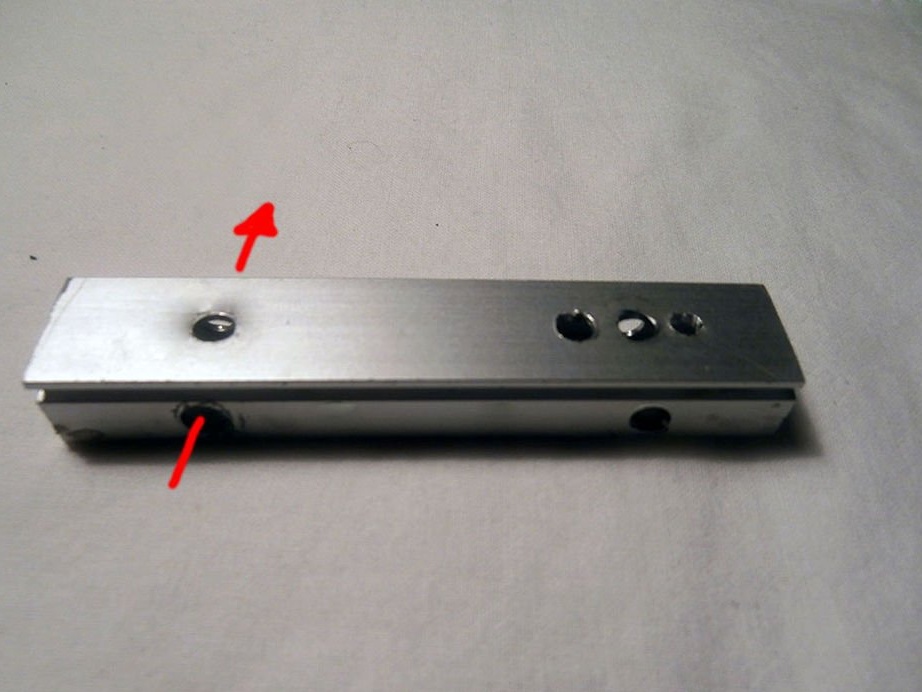
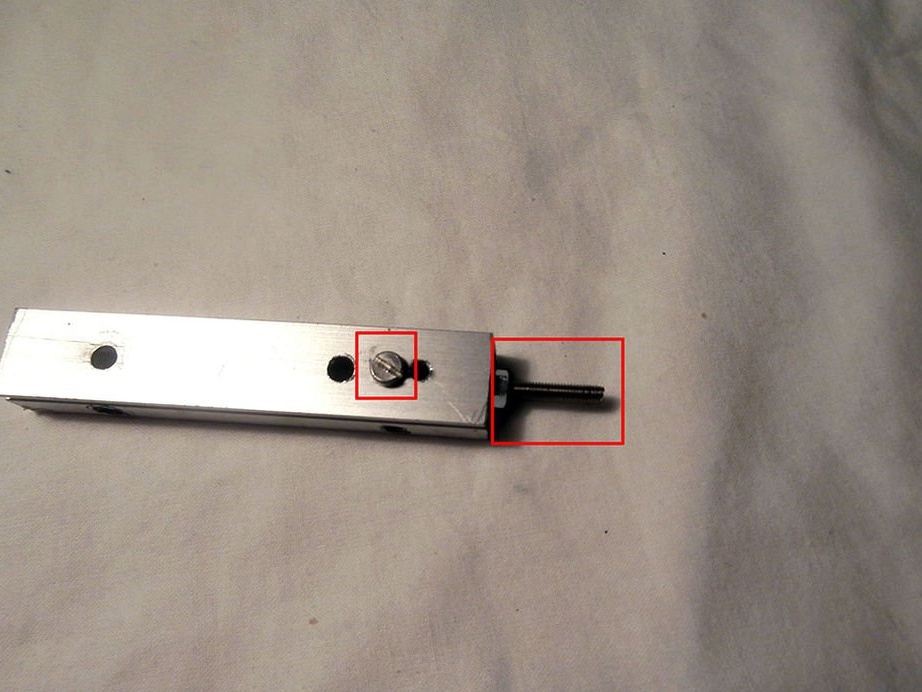
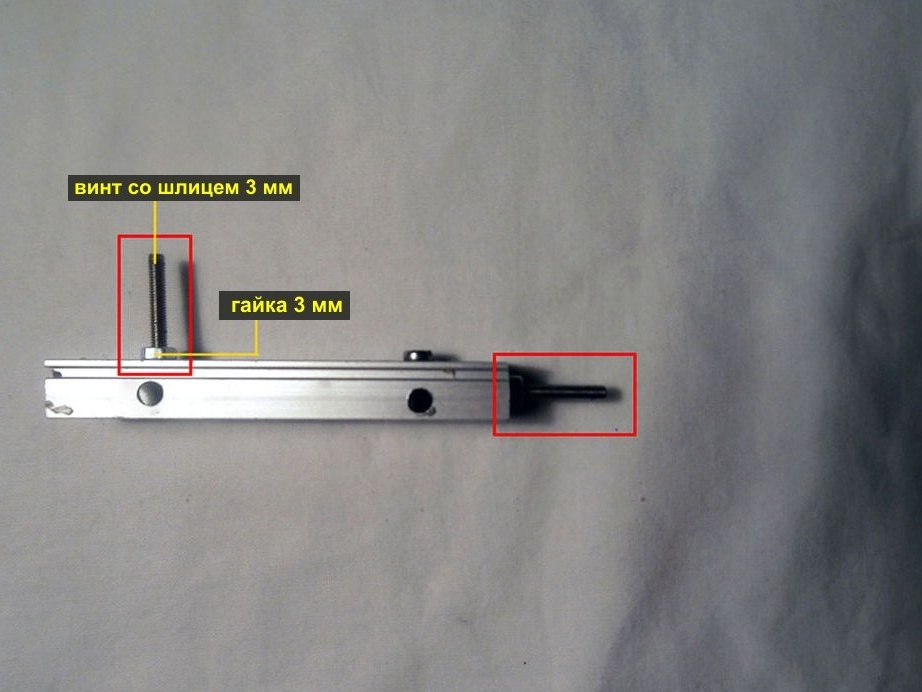
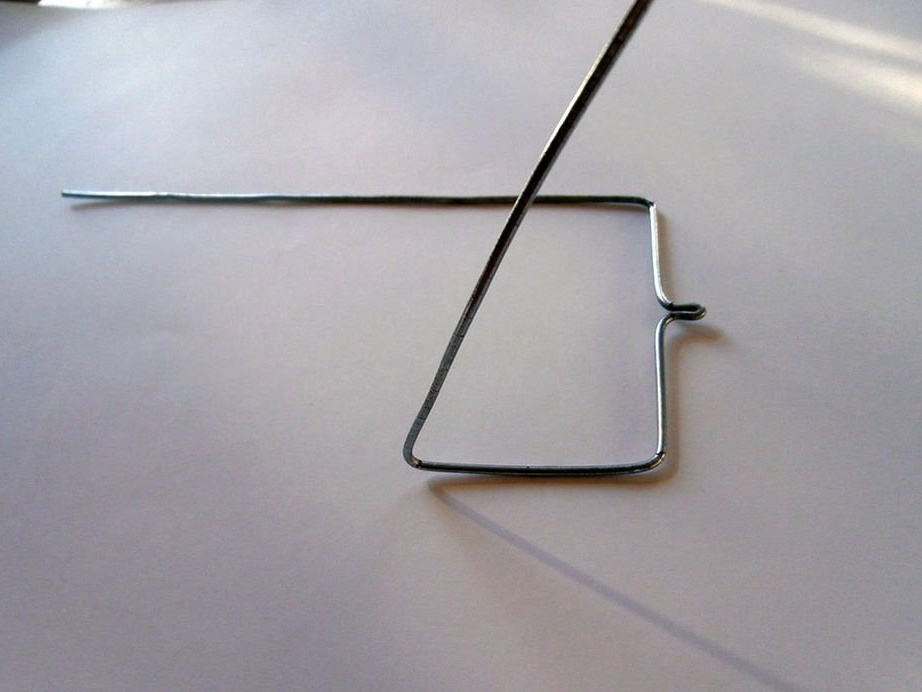
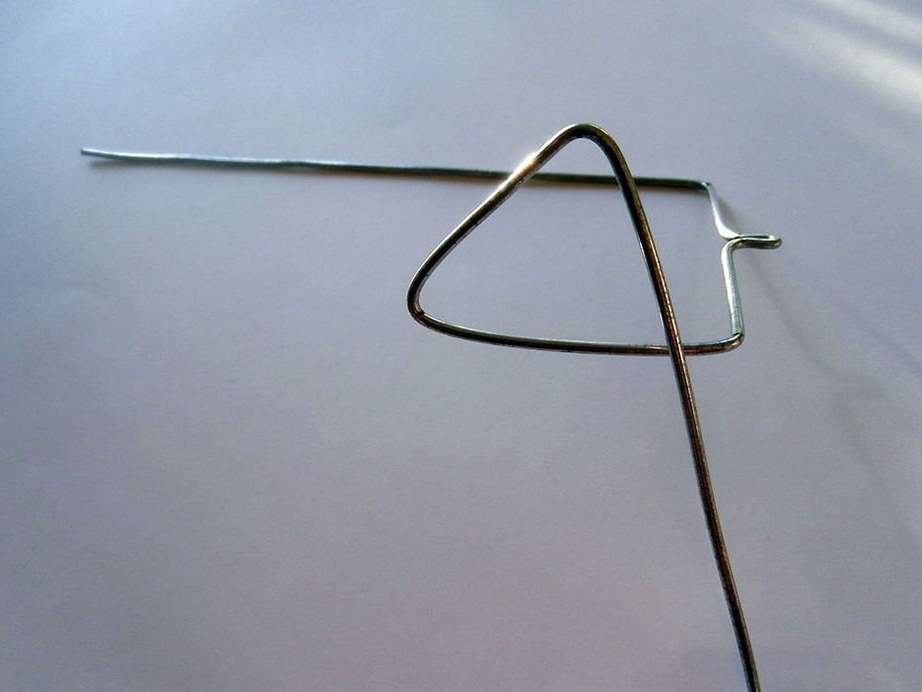
Schritt 5: Gehäuse

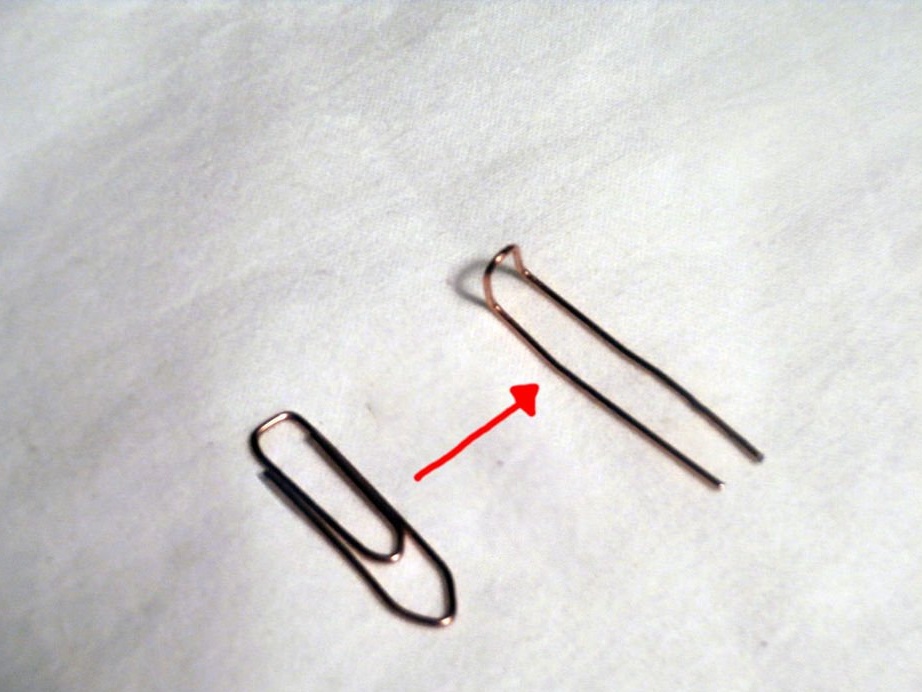

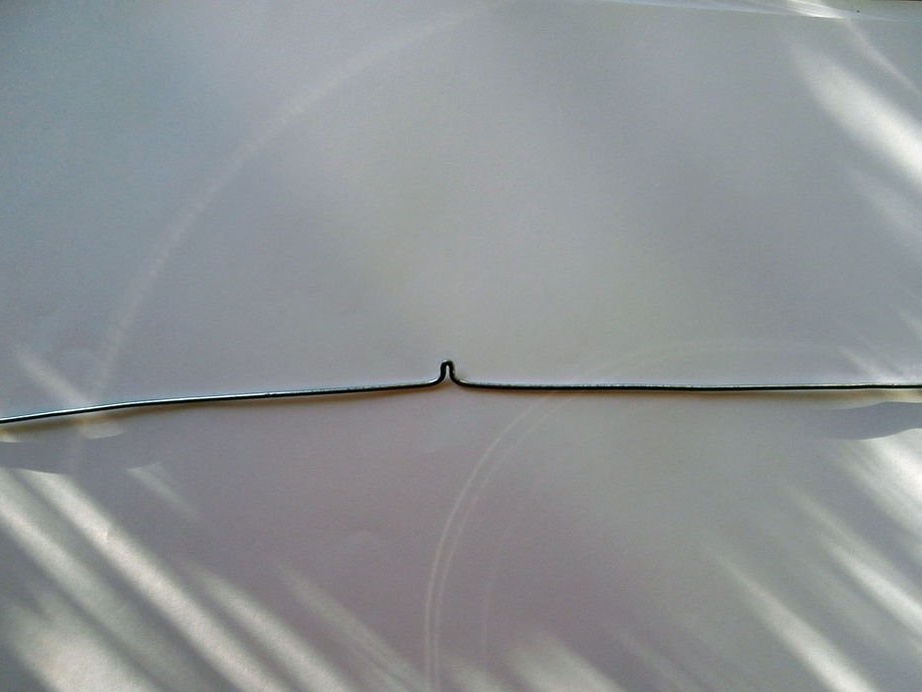
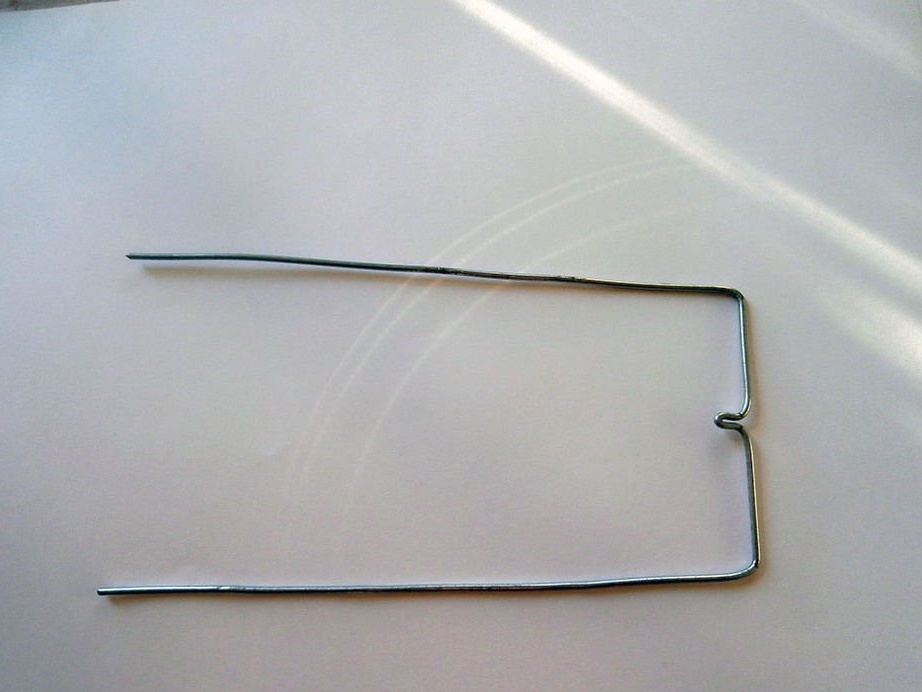
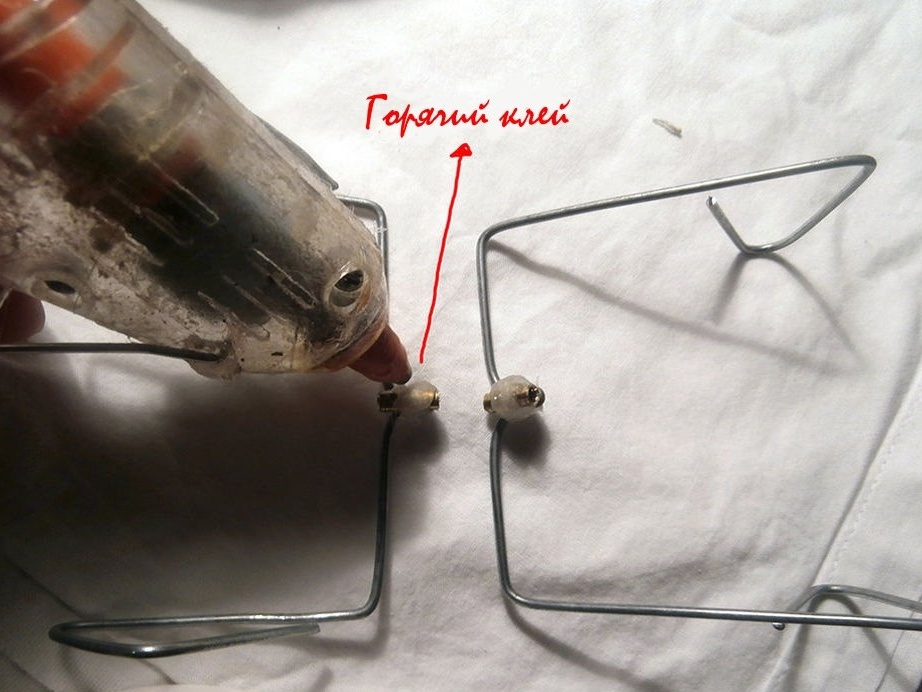
Schritt 6: Vorderbeine
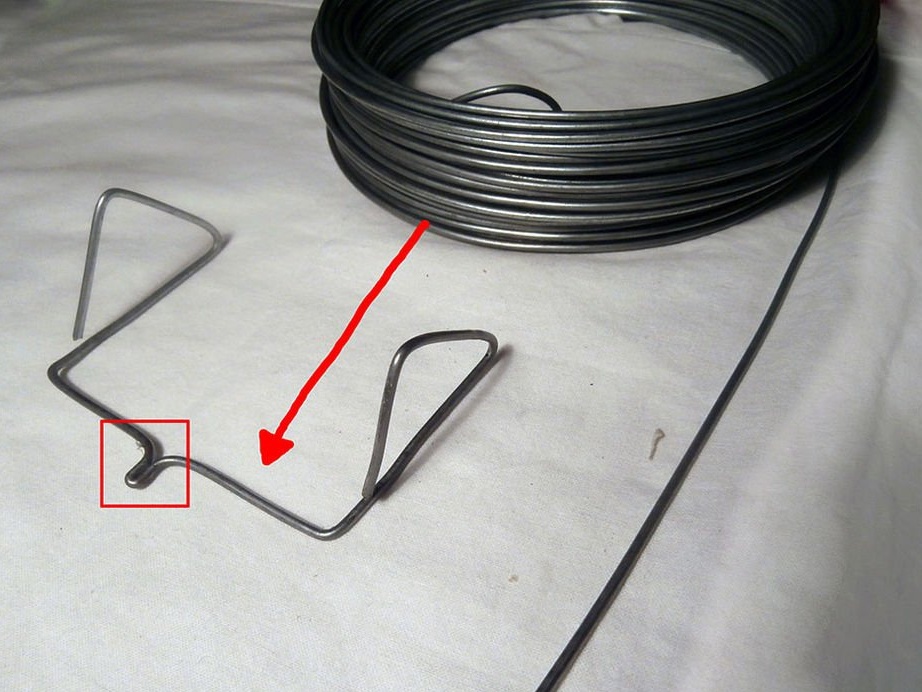
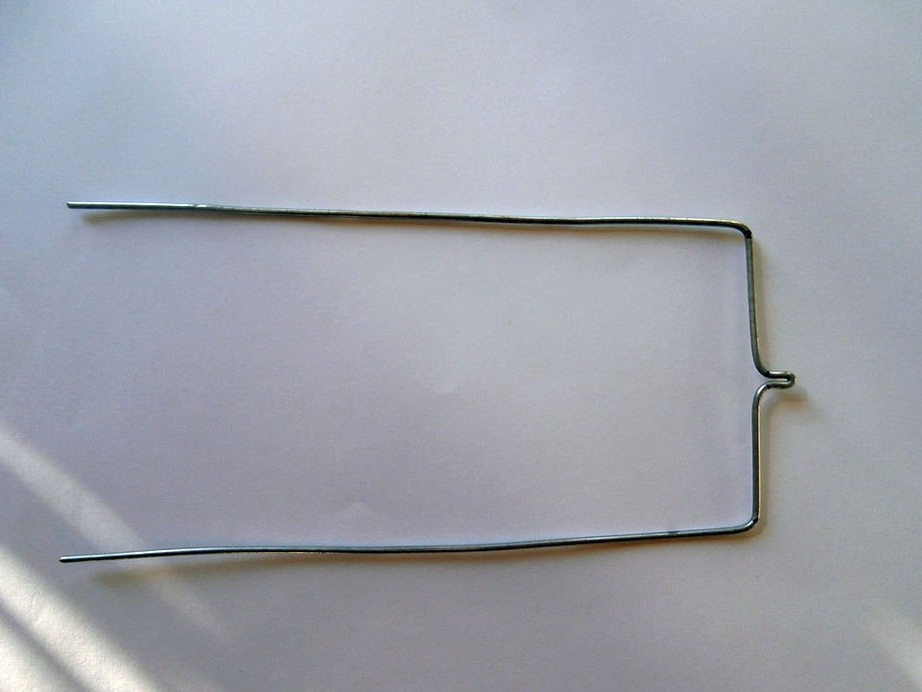
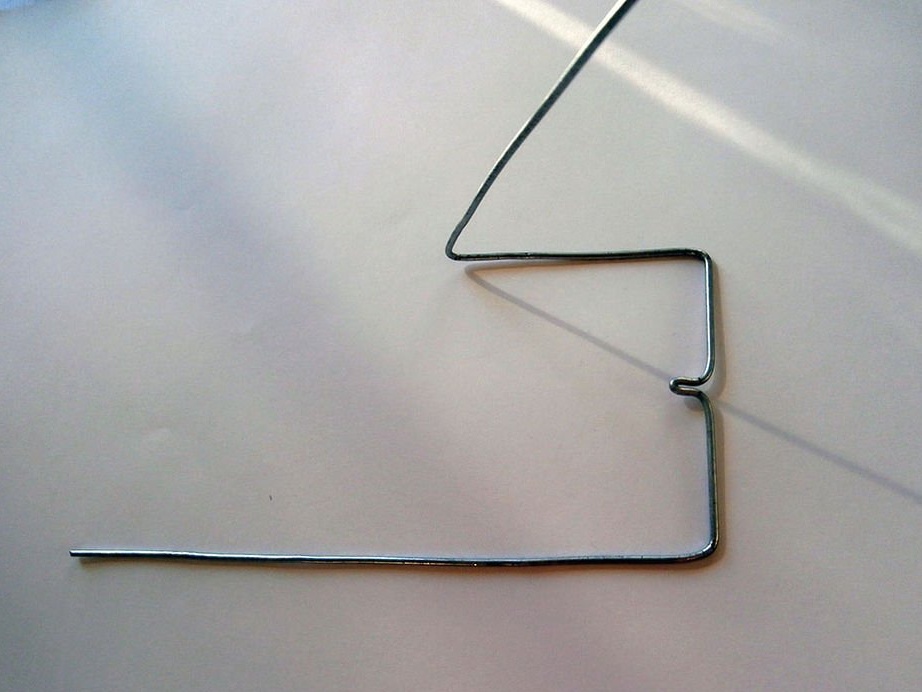
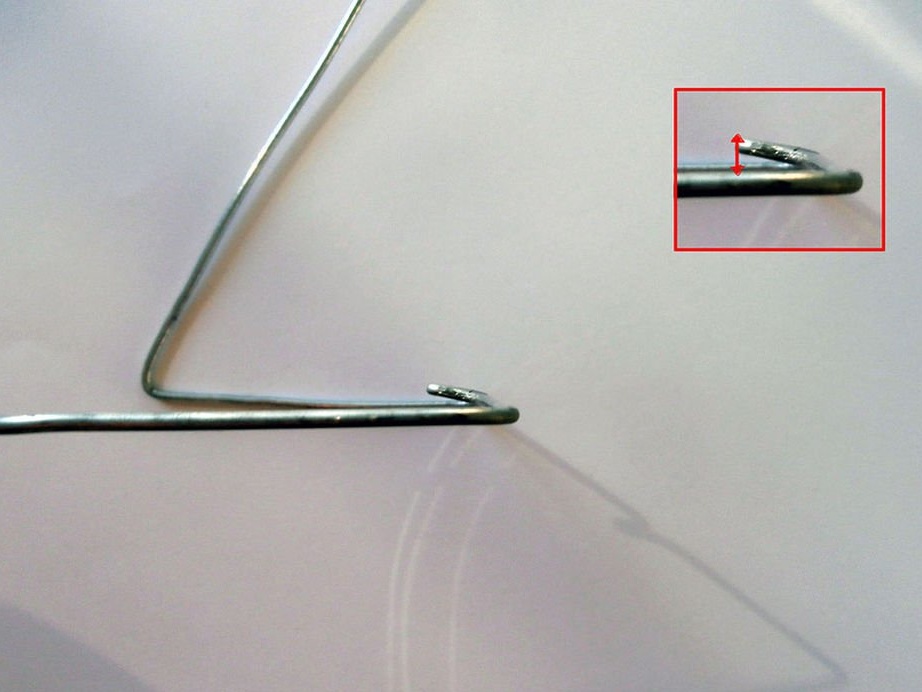
Schritt 7: Hinterbeine
Schritt 8: Anbringen der Füße
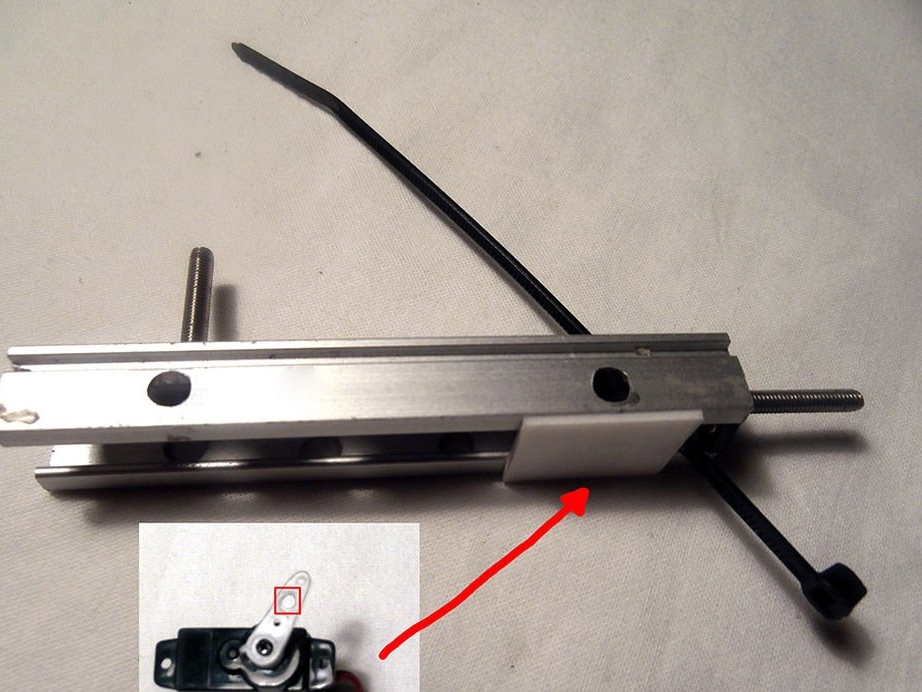
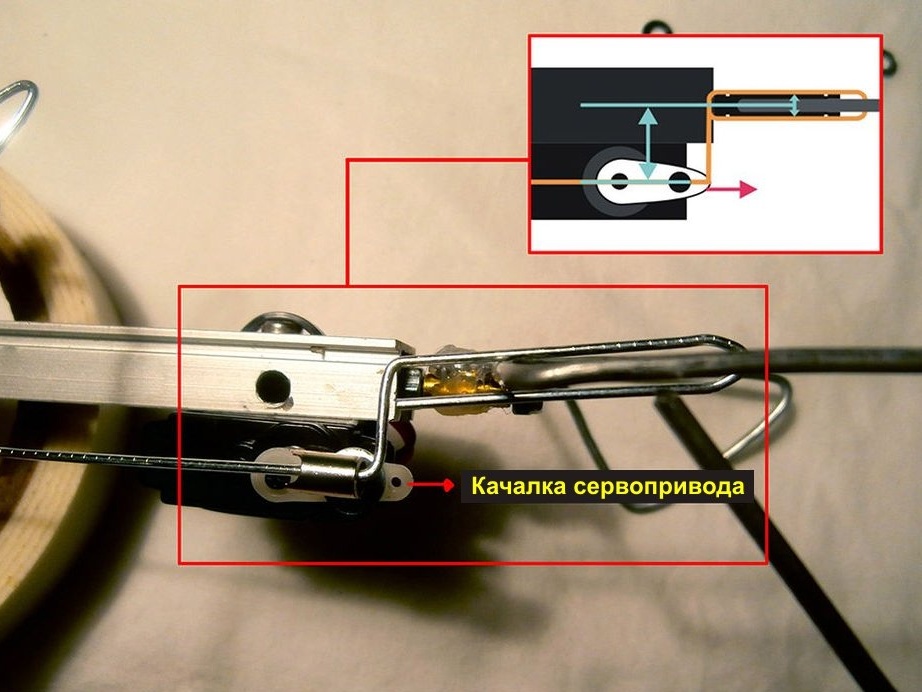
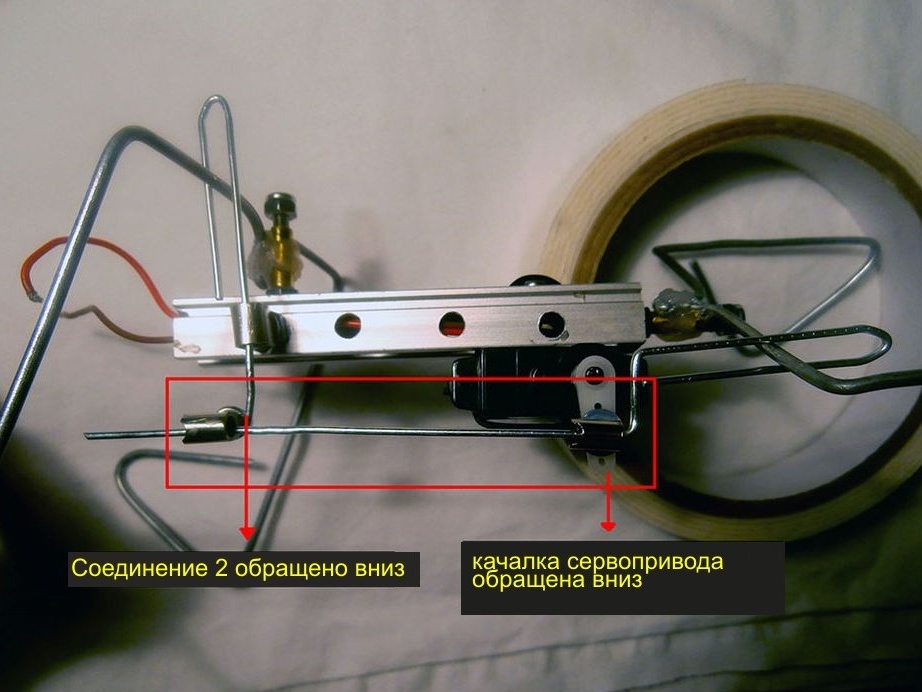
Schritt 9: Kupplung
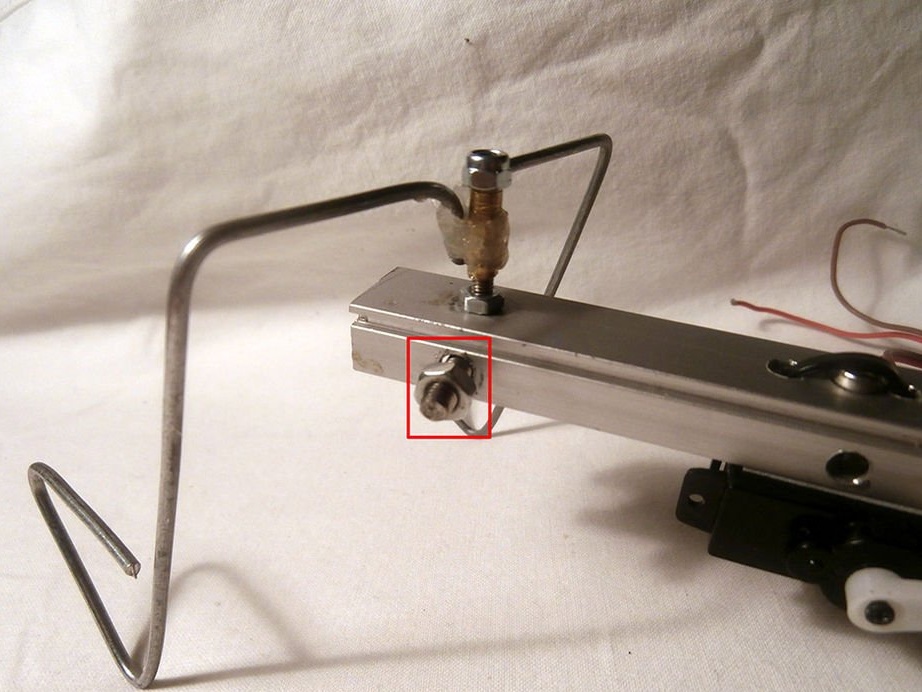
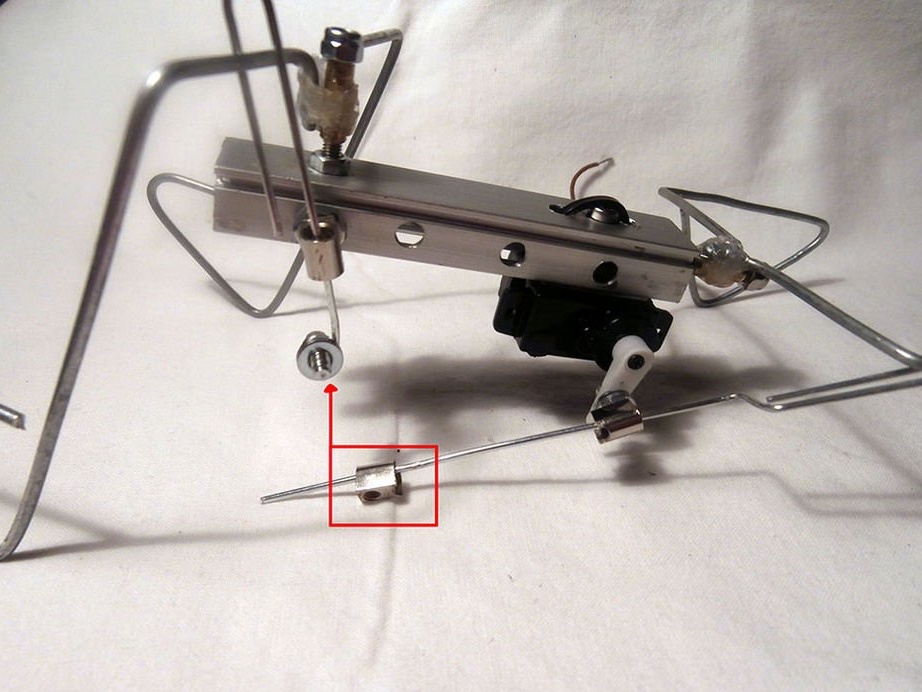
Schritt 10: Kupplungshalterung
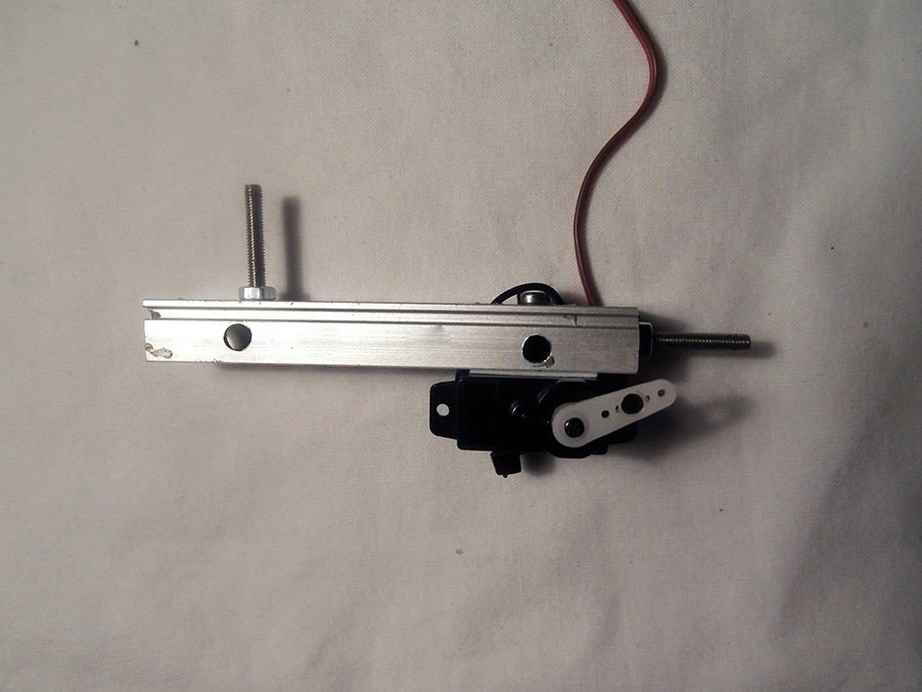
Schritt 11: Der letzte Schliff
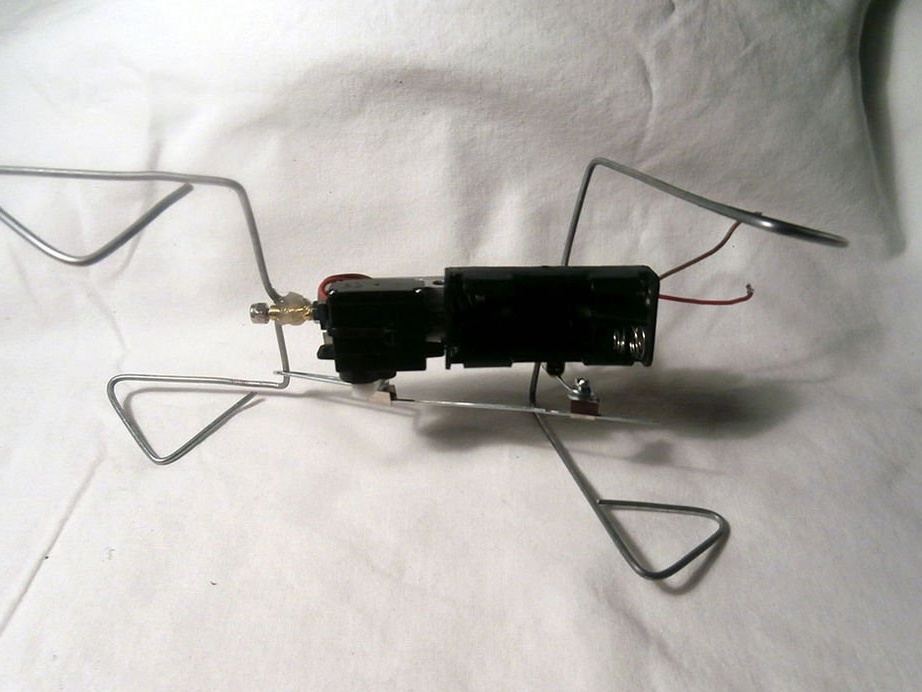
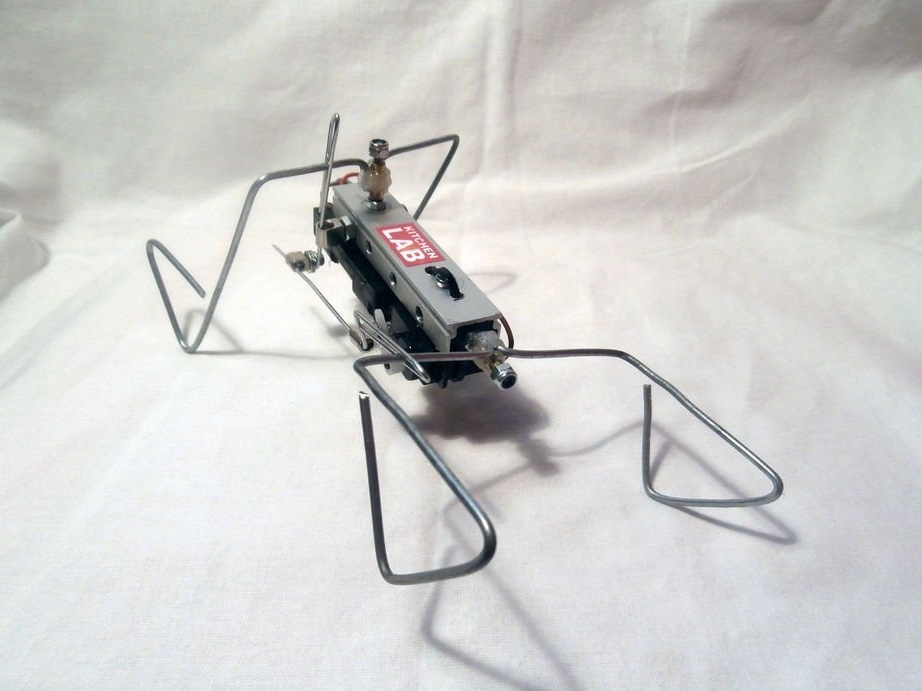
Am Ende verdrahten Sie einfach das Servo und die Batterien und der Roboter Eule wird eine Reise um Ihr Haus beginnen :)