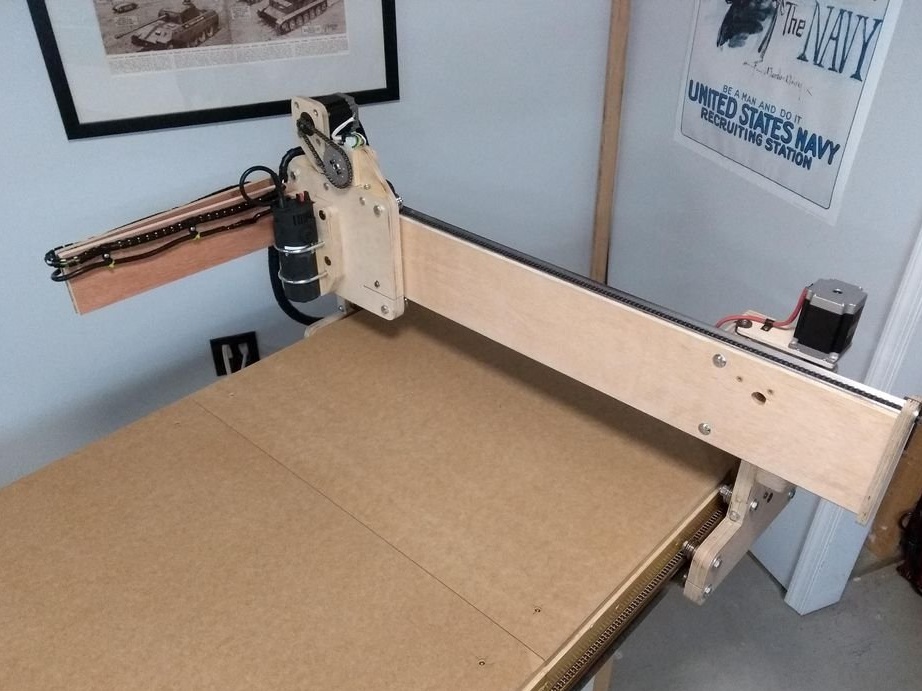
Der Meister baute diese Fräsmaschine hauptsächlich aus dem Material zusammen, das er zur Verfügung hatte.
Dies ist eine klassische dreiachsige Fräsmaschine. Es hat ein Portal, das sich entlang der Länge der Basis (Y-Achse) bewegt. Es gibt einen Wagen, an dem der Router montiert ist und der sich hin und her bewegt (X-Achse). Und es gibt einen Mechanismus, der den Router nach oben und unten hebt und senkt (Z-Achse). Für die Bewegung verwendet der Master Schrittmotoren und Ketten. Für Linearschienen werden Stahl-V-Lager verwendet, die sich über eine Stahlecke erstrecken. Der Assistent gibt keine detaillierten Anweisungen, sondern nur das allgemeine Konzept und die Ideen.
Werkzeuge und Materialien:
- Nachttisch;
-Tür;
-Roller;
-Metallecke;
-Sperrholz;
-Fasteners;
-Drill;
Fräser;
-Säge;
-Wire;
-Kette;
- Gewindestange;
-Schrittmotoren;
-Stars;
-Lager;
-Adapter für einen Staubsauger;
-Arduino;
- Estlcam-Controller;
-Solid State Relay;
-Netzteil;
-Schritt-Treiber;
Erster Schritt: Der Tisch
Der Meister stellte den Tisch vom alten Nachttisch ab. Als Arbeitsplatte nagelte der Meister eine Holztür an den Tisch. Unten wurden Rollen installiert.



Schritt zwei: Schienen
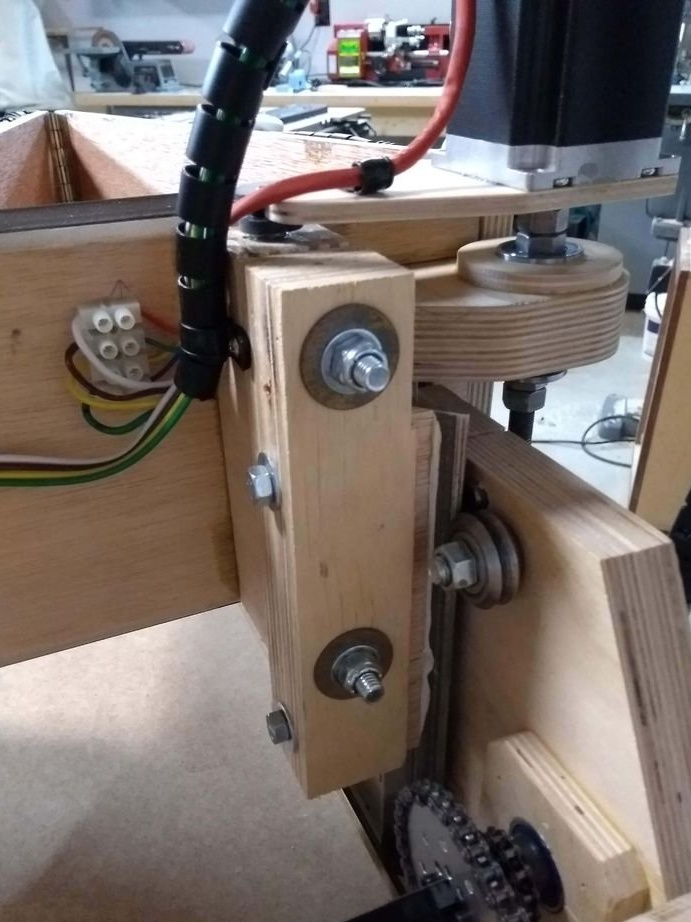
Der Meister verwendet eine Metallecke als Führung. Auf dem Sperrholzrohling befestigt der Master vier Lager mit einer Nut. Es ist klar, dass die Ecke auf beiden Seiten des Tisches angebracht ist.




Schritt drei: Portal
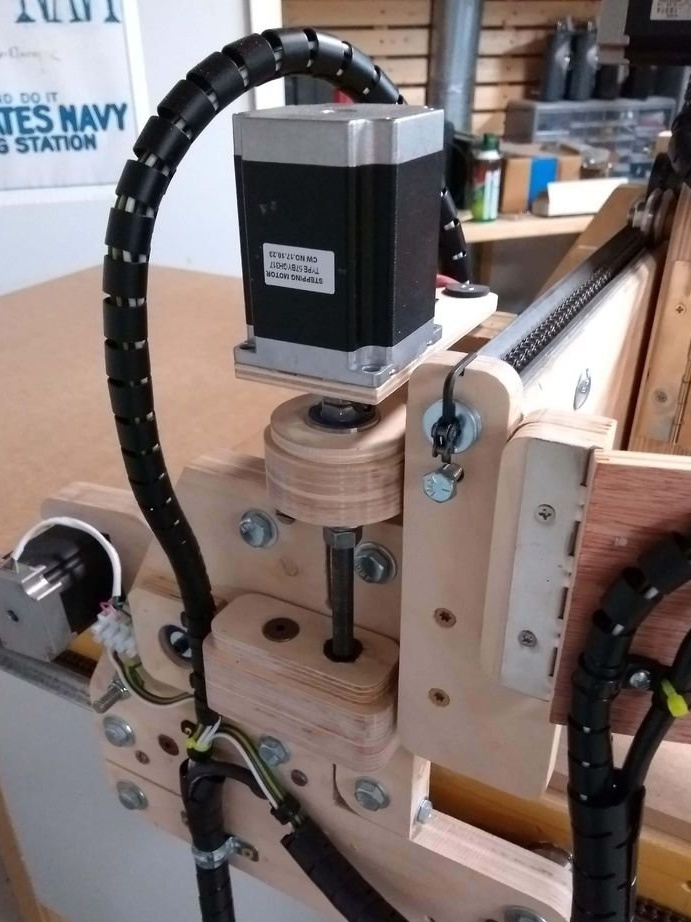
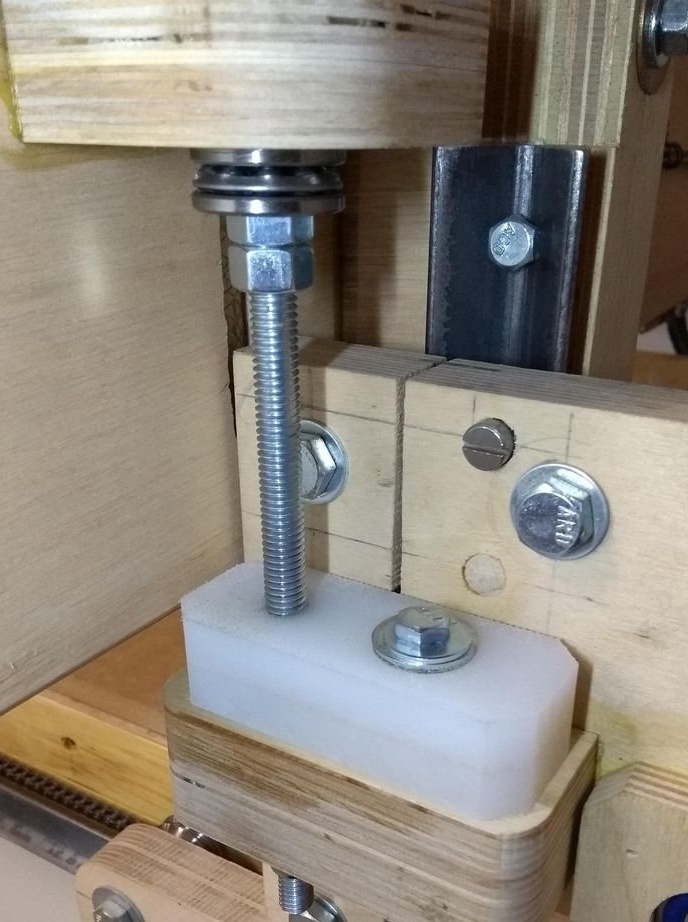
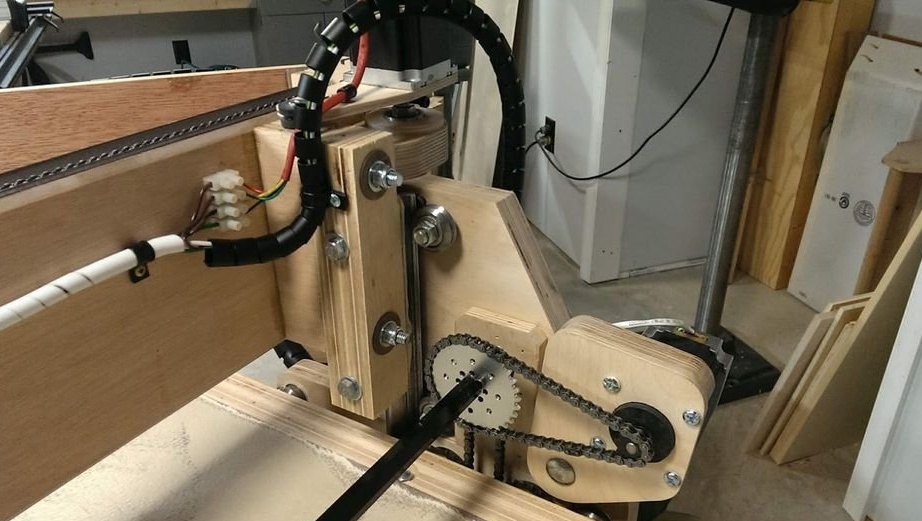
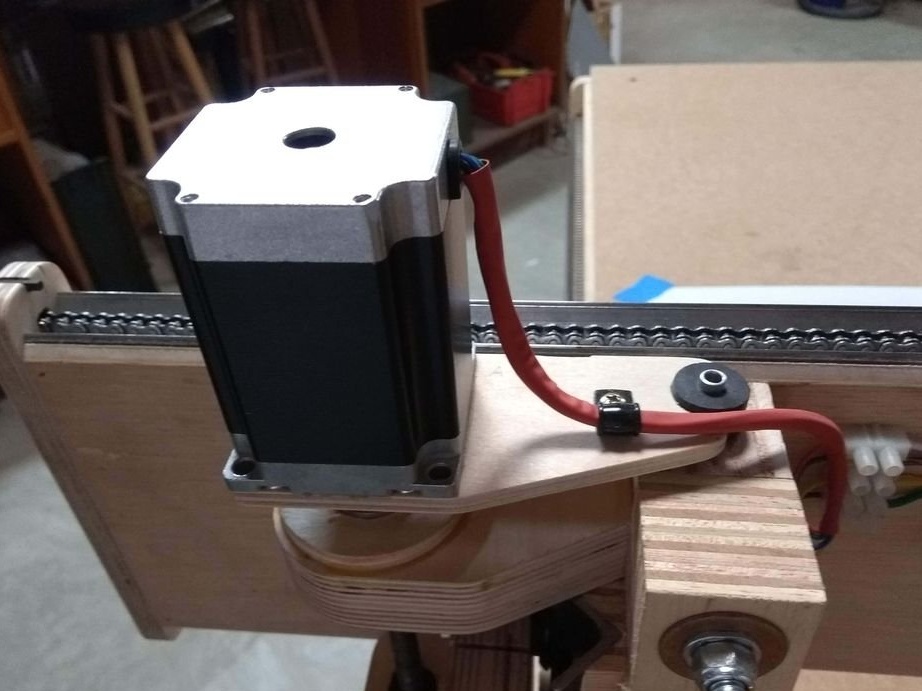
Das Portal besteht aus zwei miteinander verklebten Sperrholzschichten. Ein Fräser ist am Querdetail des Portals montiert. Das Querteil bewegt sich zusammen mit dem Fräser entlang derselben Schienen wie im vorherigen Schritt auf und ab. Zwei Schrittmotoren sind installiert, um sich entlang der Kanten zu bewegen. Der Kapitän befestigte lange Schrauben an den Achsen der Motoren. Am unteren Rand befindet sich ein Knoten mit Nüssen. Auf Befehl beginnen die Motoren zu arbeiten, die Wellen drehen sich und der Fräser senkt oder hebt sich.
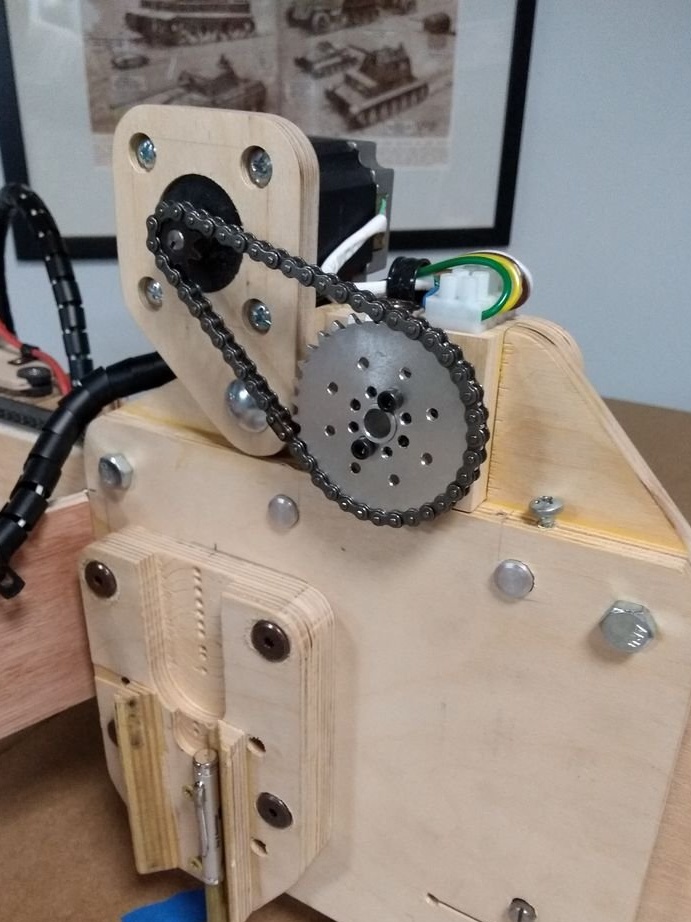
Um den Schlitten mit der Mühle auf der Z-Achse zu bewegen, verwendet der Master einen Schrittmotor und ein Kettenrad.





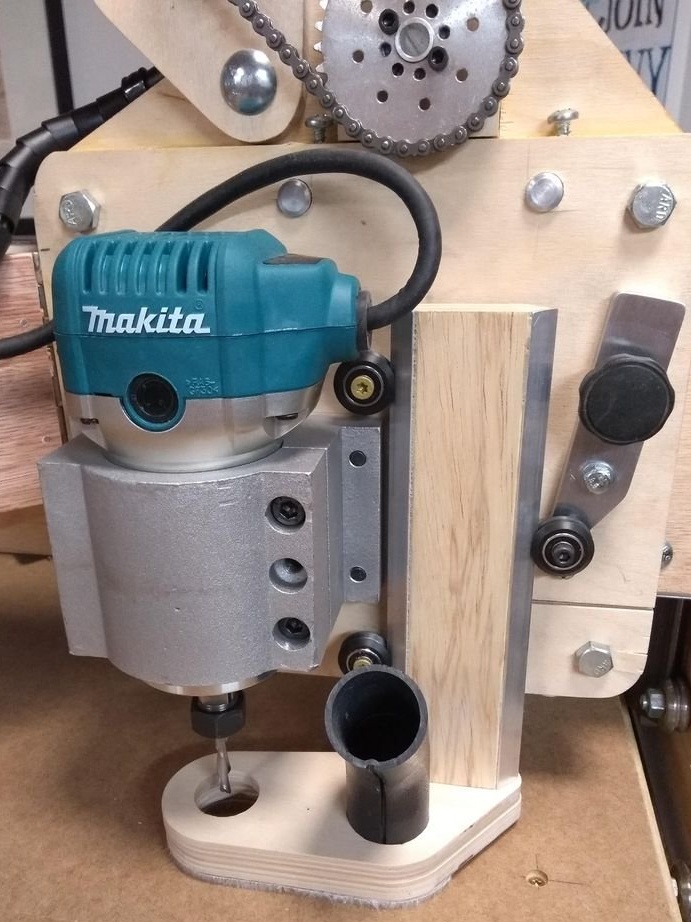
Schritt vier: Fräser
Auf dem Computer ist ein Makita RT0701C-Router installiert. Außerdem installiert der Master einen Adapter zum Anschließen der Schläuche des Staubsaugers.



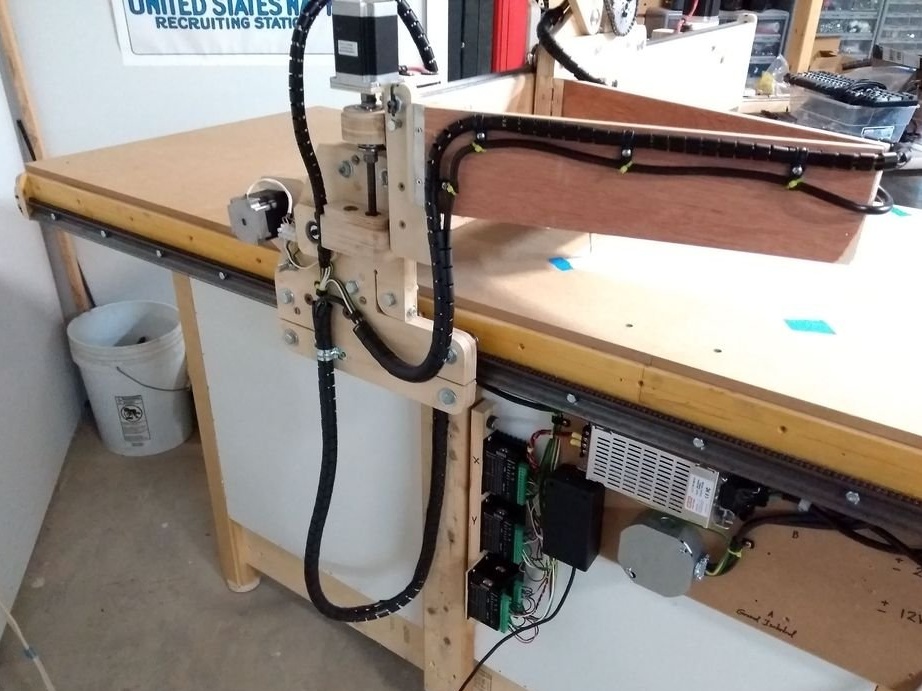
Fünfter Schritt: Management
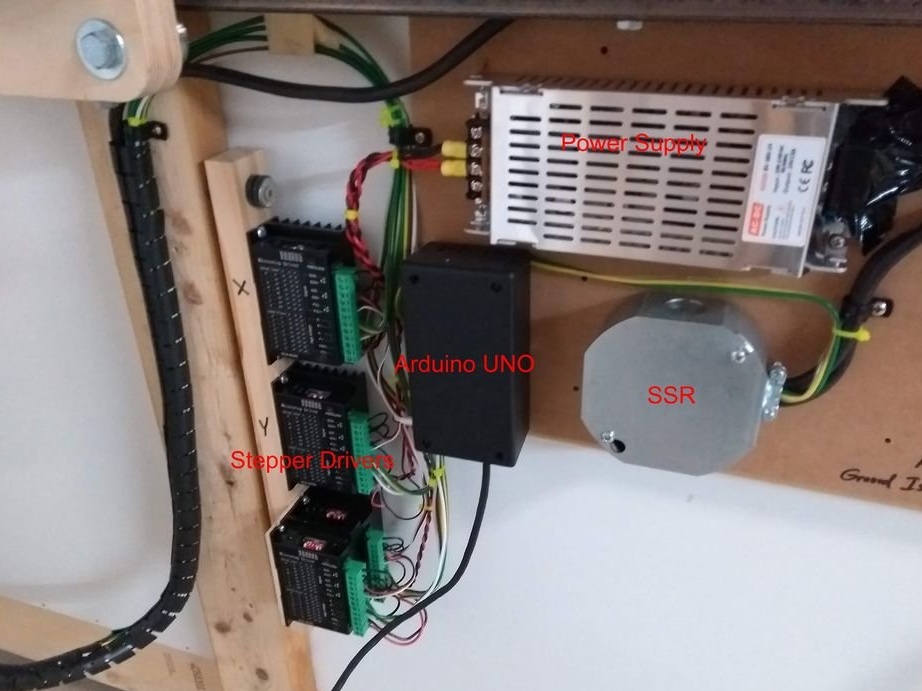
Managementsystem basierend auf Arduino UNO und ein kleiner PC mit EstlCAM CNC-Software.
Der Arduino Uno ist auf der Rückseite des Geräts montiert und unterstützt die Estlcam-Controller-Software. Die elektrische Box enthält ein 10A SSR (Solid State Relay), das den Router ein- und ausschaltet. Auf der linken Seite befinden sich Steppertreiber TB6600 und eine 24-V-, 15-A-Stromversorgung. Die Drähte zu den Motoren verlaufen durch die Riffelung. Ein Windows 10-PC zeigt das Bild auf dem Monitor an und wird von einer drahtlosen Maus und Tastatur gesteuert.

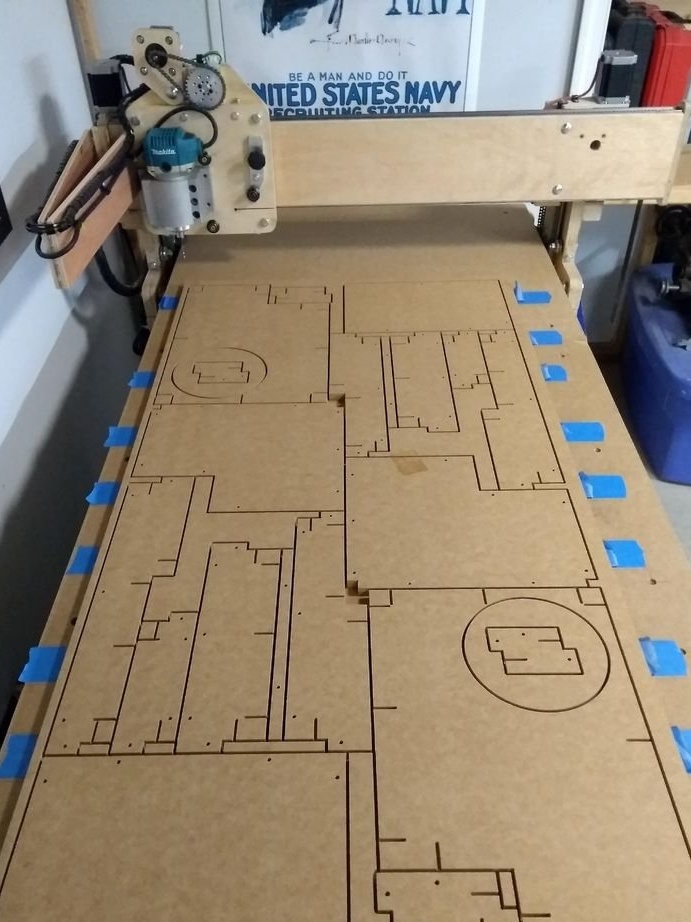
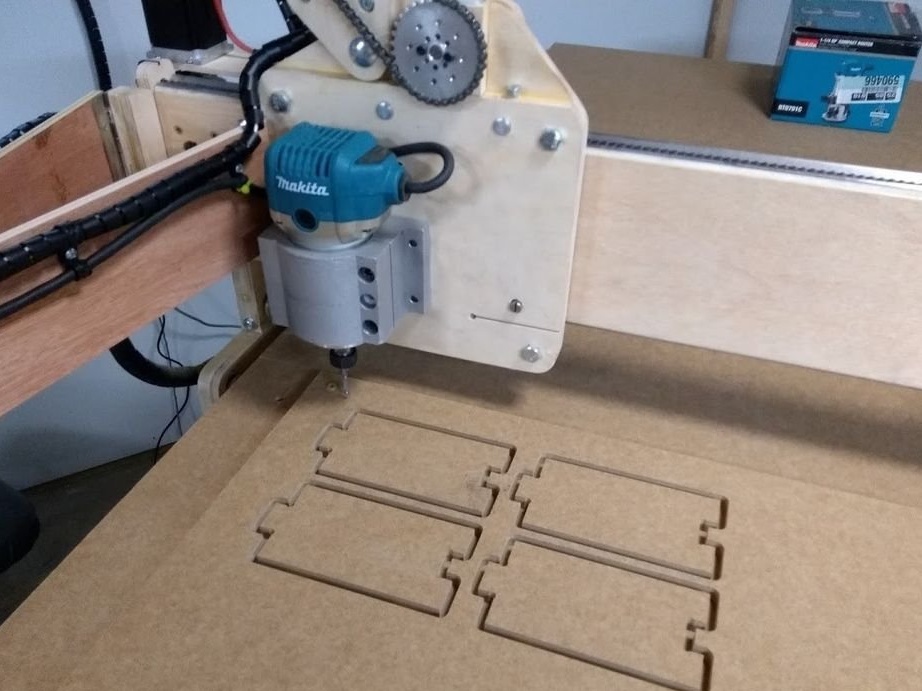
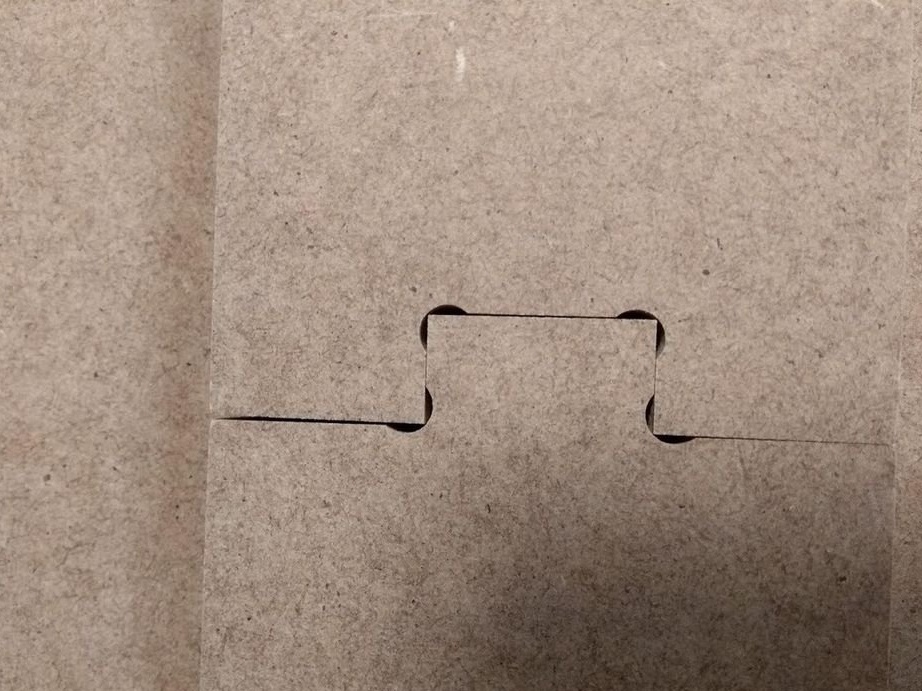
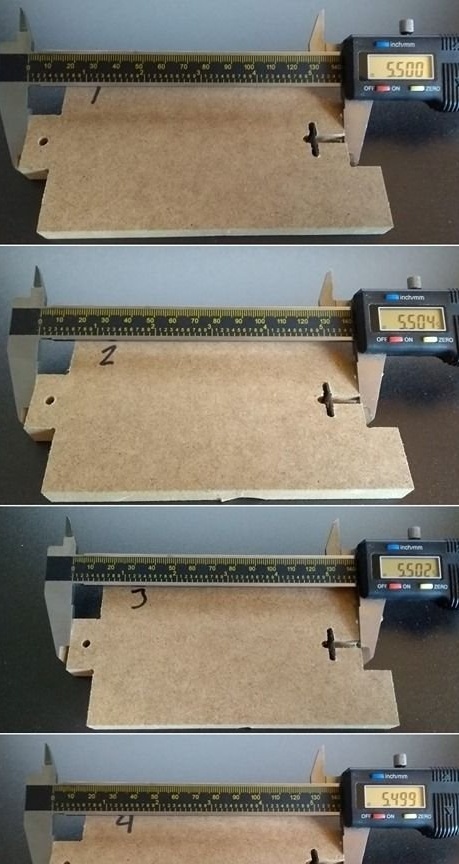
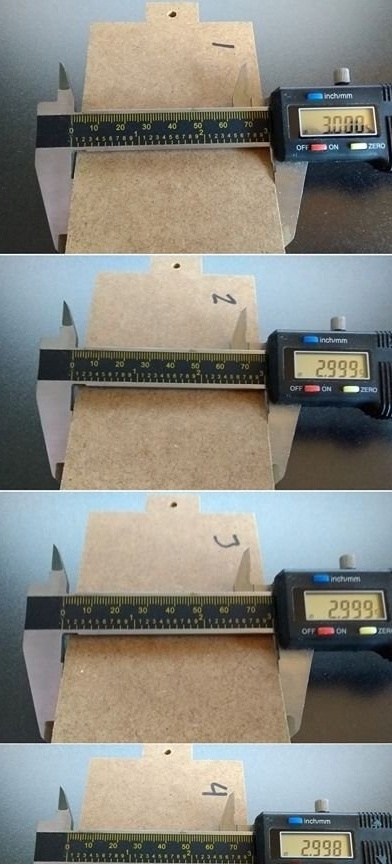
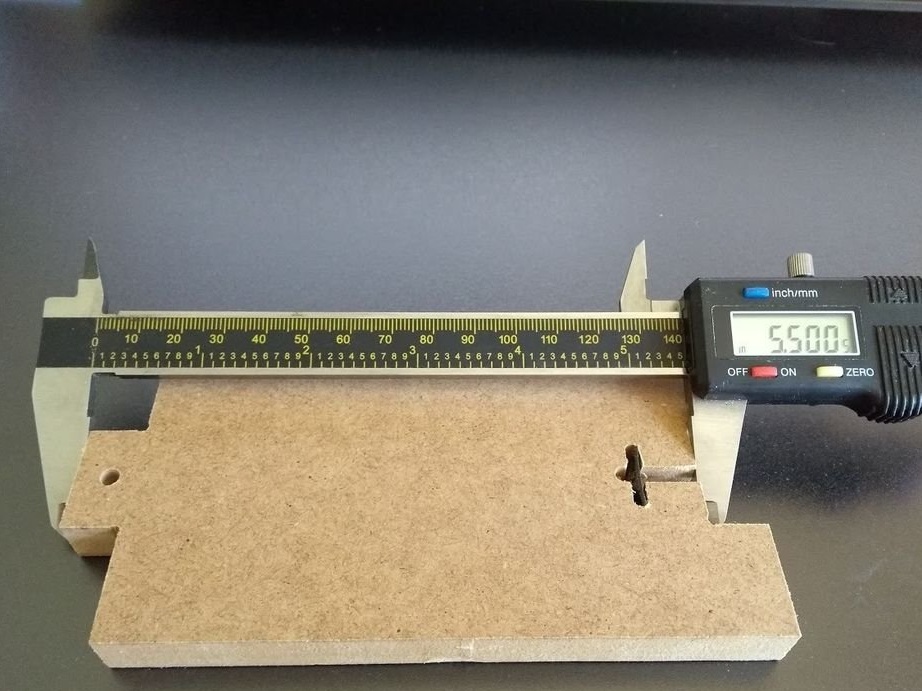
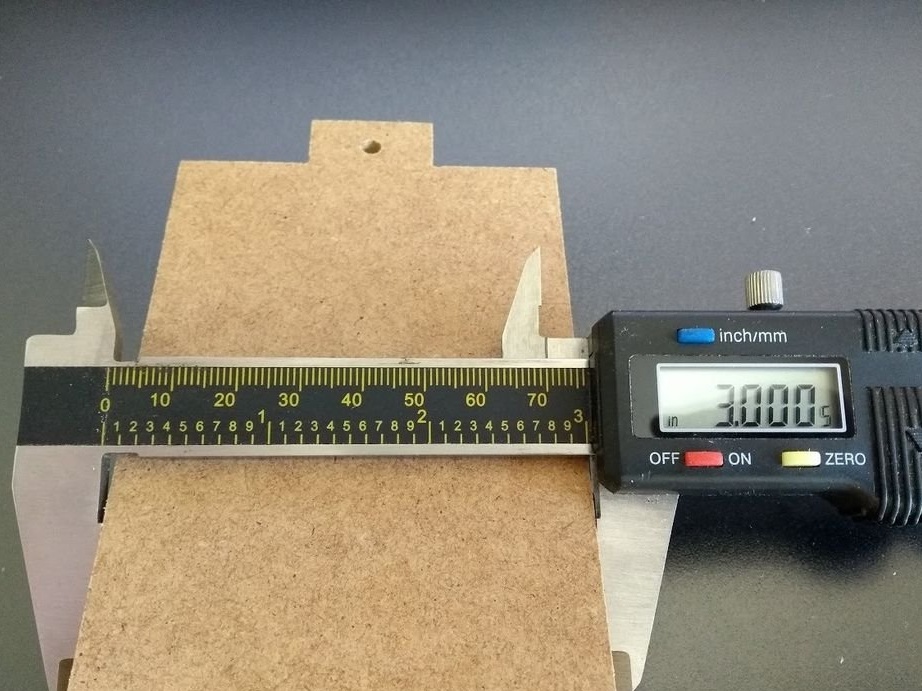
Nach Angaben des Meisters erwies sich die Maschine als ganz normal. Das letzte Foto zeigt Beispiele für die Funktionsweise der Maschine.