Der Meister interessiert sich seit langem für Flugzeugmodelle. Zuerst war es ein Flugzeugmodell, dann Quadrocopter. In diesem Artikel erklärt Ihnen der Assistent, welche Materialien für einen Quadrocopter besser geeignet sind und wie Sie einen Rahmen aus Sperrholz herstellen. Sehen wir uns ein kurzes Demo-Video an.
Um einen Quadrocopter herzustellen, verwendete der Master Folgendes
Werkzeuge und Materialien:
-Birch Sperrholz;
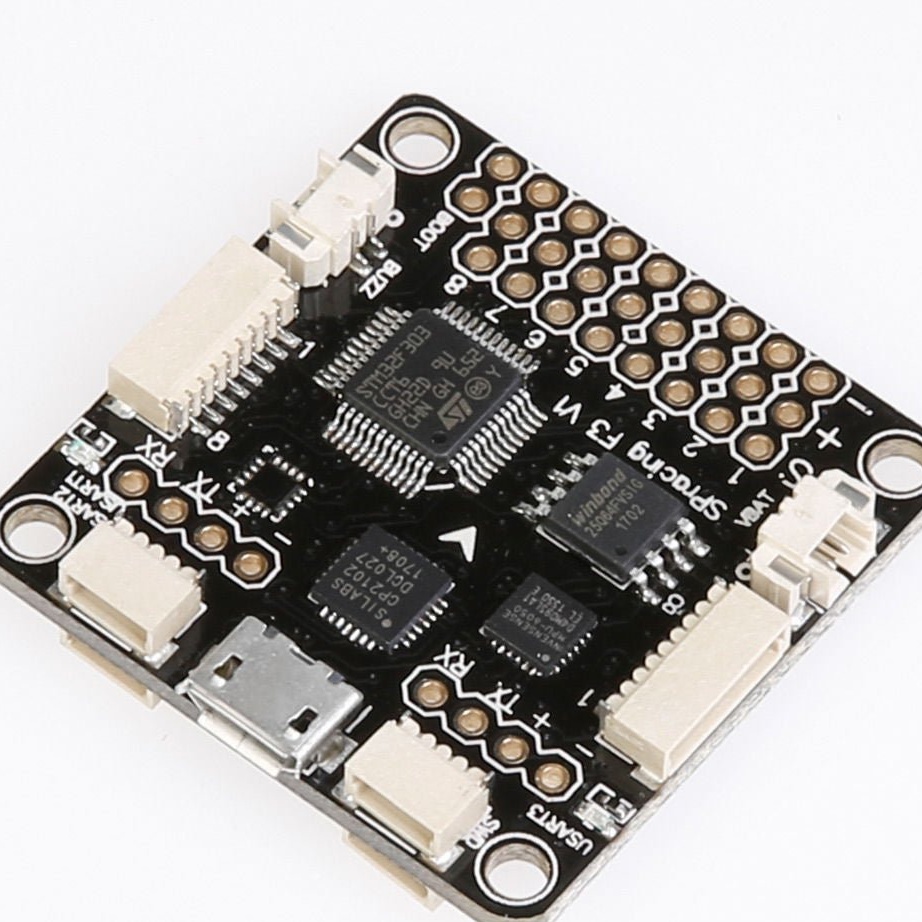
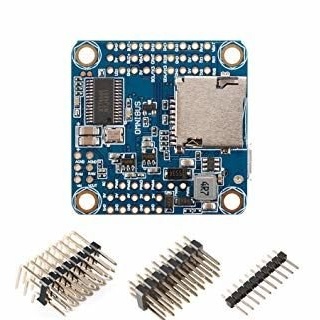
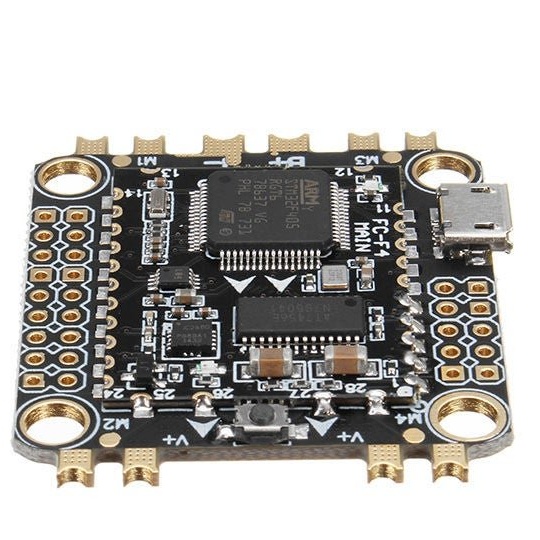
-Omnibus F4 Controller, SP Racing F3;
-Mateck Stromverteilungsplatine;
- Controller HGLRC 28A BLHeli ESC - 4 Stück;
- Motor Racestar BR2204 2600Kv Racing Edition -4 Stück;
- Propeller KingKong 5X4X3 - 4 Stück;
- Flsky TH9X Funkmodul mit Empfänger;
Batterie Gens 3800 mAh;
-Racks; - 16 Stück;
-Schrauben M3;
- Schraubendreher;
-Lötzubehör;
-Messer;
- CNC-Fräser;
Erster Schritt: Materialauswahl
Rahmen.
Normalerweise besteht der Rahmen aus leichten und starren Bauteilen wie Glasfaser, Kohlefaser, Holz, Aluminium usw. Es gibt viele verschiedene Rahmentypen. Der Master stellt einen Rahmen für vier Motoren her.
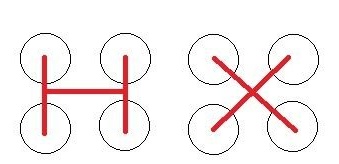
Solche Rahmen liegen hauptsächlich in der H-Form oder X-Form vor. Die X-Form ist ein gutes Gleichgewicht zwischen Stabilität und Manövrierfähigkeit. Es ist dieser Rahmen, den der Meister machen wird.
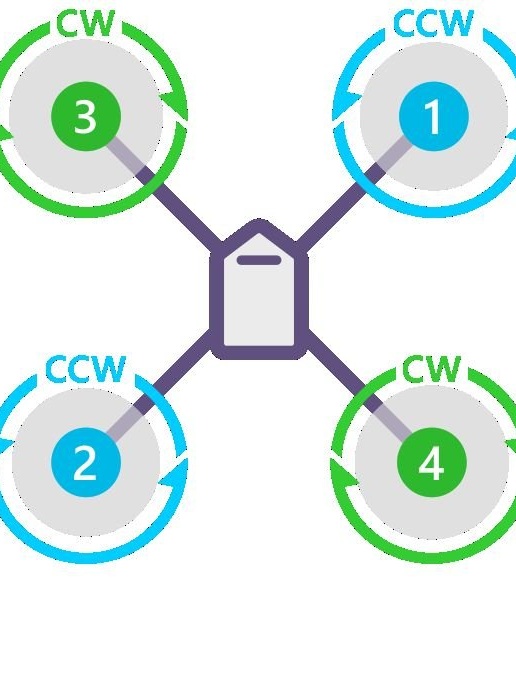

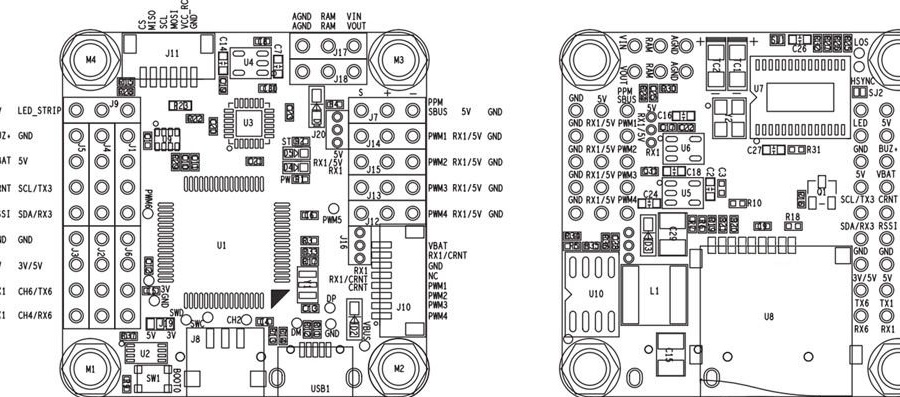
Controller
Die Steuerung steuert den Betrieb der Motoren. Das Diagramm zeigt, dass sich alle Motoren in entgegengesetzte Richtungen drehen, um das von jedem Motor erzeugte Drehmoment zu neutralisieren. Der Controller ist das Gehirn eines Quadrocopters. Es handelt sich im Grunde genommen um einen kleinen Computer, der mit seinen Sensoren ständig Winkel und Geschwindigkeit misst.
Flugsteuerungen werden hauptsächlich nach Prozessorspezifikationen klassifiziert.

Motoren
Es gibt zwei Arten von Motoren, bürstenlose Motoren und bürstenlose Motoren. Die meisten Quadrocopter verwenden bürstenlose Motoren, die sehr schnell auf Änderungen der Drehzahl- und Drehmomentanforderungen reagieren können. Speziell für bürstenlose Motoren elektronisch Drehzahlregler (ESC).
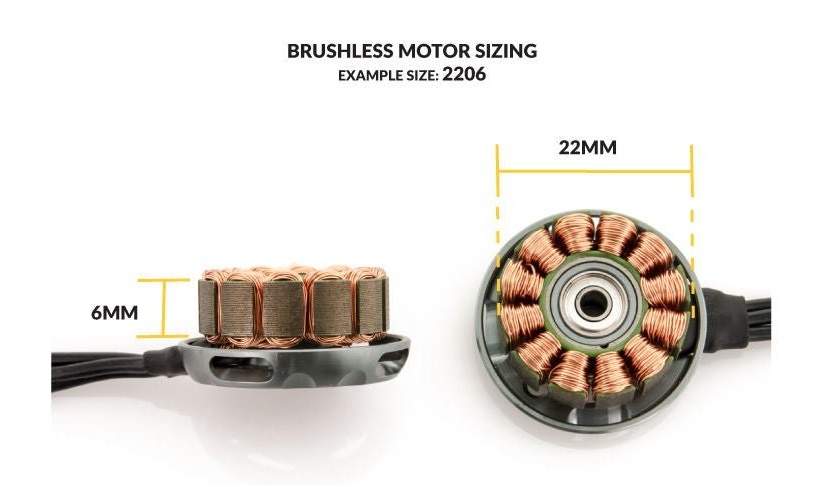
Die Größe bürstenloser Motoren wird durch eine 4-stellige Zahl (AABB) angegeben. "AA" ist die Statorbreite und "BB" ist die Statorhöhe oder der Statordurchmesser, beide in mm (Millimeter). Beispielsweise hat der Racestar BR2205 einen Stator mit einem Durchmesser von ungefähr 22 mm und einer Höhe von ungefähr 05 mm.
Je höher der Stator, desto größer die Leistung bei höheren Drehzahlen und je breiter der Stator, desto größer das Drehmoment bei niedrigeren Drehzahlen.
Der KV-Wert des Motors gibt die Drehzahl an, mit der sich der Motor dreht, wenn Sie 1 Volt an seine Wicklungen anlegen.Sie wird durch die Anzahl der Wicklungen des Kupferdrahtes im Motorstator und die Magnetkraft der Magnete bestimmt.
Weniger Wicklungen bedeuten weniger Widerstand und daher höhere Drehzahlen. Aus diesem Grund haben Motoren mit höherem KV tendenziell weniger Statorwicklung.
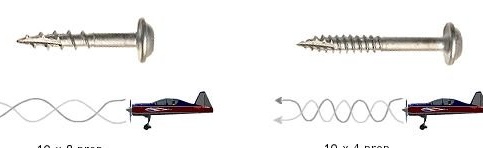
KV bestimmt, welche Schraube Sie mit dem Motor verwenden können. Je niedriger der KV, desto größer die Schraube, die er drehen kann, und umgekehrt. Es ist nicht möglich, die Hubkraft durch Einbau einer größeren Schraube am Motor mit einem höheren KV zu erhöhen, da die Drehmomentanforderungen über die zulässige Leistung hinausgehen und der Motor überhitzt.
Zum Beispiel: BR2205 2600-kV-Motoren können mit 5 x 4-Zoll-Schrauben arbeiten, und BR2212 1000-kV-Motoren können mit 10 x 4,5-Zoll-Schrauben arbeiten
KV ist keineswegs ein Indikator für die Motorleistung, Motoren mit einem höheren KV sind nicht unbedingt leistungsstärker als Motoren mit einem niedrigeren KV.


Elektronische Drehzahlregler (ESC).
Jüngste Fortschritte bei Mini-Quadrocoptern wurden durch die Einführung kleiner elektronischer Drehzahlregler ermöglicht, mit denen bürstenlose Motoren arbeiten können. Der Betrieb elektronischer Geschwindigkeitsregler besteht darin, das Drosselsignal vom Flugregler zu empfangen und die Motordrehung auf der erforderlichen Geschwindigkeit zu halten.
In diesen kleinen Geräten arbeiten eine Reihe von Technologien, die den Rahmen dieses Handbuchs sprengen. Wählen Sie beim Kauf einen Regler mit einem Nenngleichstrom von mindestens 20% mehr als dem berechneten.


Propeller.
Propeller wandeln die mechanische Energie von Motoren in Traktion um. Die Größe und Form des Propellers spielen eine große Rolle für die Flugeffizienz.
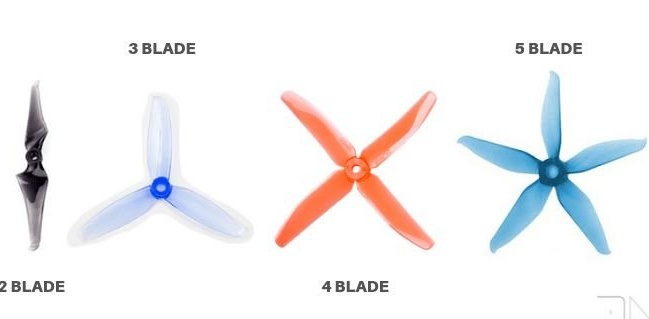
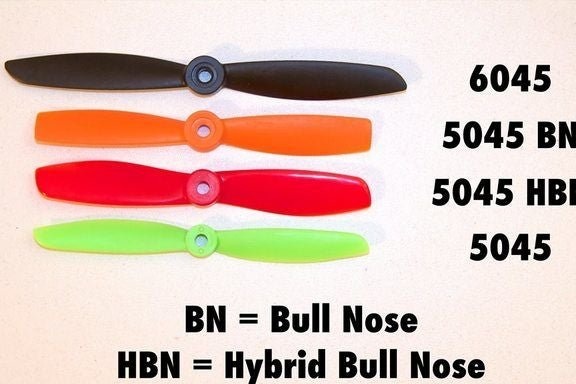
Es gibt zwei Arten von Formaten, die Hersteller verwenden: L x P x B | LLPP x B. Wobei L die Länge, P die Teilung und B die Anzahl der Schaufeln ist.
Die Propeller können aus verschiedenen Materialien hergestellt werden, wie z. B. Kunststoffverbund, Kohlefaser, Holz usw. Jede Art von Material hat einzigartige Eigenschaften, zum Beispiel sind Kohlefaser und Holz sehr steif und für ihren reibungslosen Betrieb bekannt, und einige Kunststoffe sind extrem langlebig. Die meisten in Mini-Quadrocoptern verwendeten Schrauben bestehen aus Kunststoffverbundwerkstoffen.
Die Größe des Propellers, den Sie verwenden können, ist durch die Größe Ihres Rahmens sowie die HF-Leistung Ihres Motors begrenzt. Je mehr Propeller Sie verwenden können, um einen bestimmten Schub zu erzeugen, desto effektiver ist er in der Regel. Bei Mini-Quadrocoptern variieren sie zwischen 5 und 6 Zoll Schrauben in Schritten von 4 bis 5 Zoll.
Die Anzahl der Blätter beeinflusst die Traktion und den Energieverbrauch. Je mehr Klingen, desto mehr Traktion und desto mehr Energie wird verschwendet.

Batterien
Derzeit verwenden die meisten Drohnen Lithium-Polymer-Batterien, die allgemein als Lipo-Batterien bekannt sind. Die Batterie ist zusammen mit dem Regler und dem Motor ein Quadrocopter-Antriebssystem.
Stellen Sie sich die Batterie nicht als Energiespeicher vor, Motoren können in sehr kurzen Abständen eine ungeheure Menge an Ampere ziehen. LiPo-Batterien sind ein Satz von Zellen, von denen jede eine Nennspannung von 3,7 V hat. Wenn eine höhere Spannung erforderlich ist, können diese Zellen in Reihe geschaltet werden, um eine Batterie zu bilden. In Reihe geschaltete Batterien sind mit dem Buchstaben „S“ und parallel zum Buchstaben „P“ gekennzeichnet.
Je mehr Zellen in Reihe geschaltet sind, desto höher ist die Spannung und je mehr Zellen parallel geschaltet sind, desto höher ist die Kapazität.
Zum Beispiel:
1S = 1 Zelle = 3,7 V.
2S = 2 Zellen = 7,4 V.
3S = 3 Zellen = 11,1 V.
4S = 4 Zellen = 14,8 V.
5S = 5 Zellen = 18,5 V.
6S = 6 Zellen = 22,2 V.
Die Kapazität wird in Milliampere oder "mAh" angegeben. Dies ist die Anzahl der Ampere, die eine Batterie in einer Stunde liefern kann. Beispielsweise kann eine 3S 2000 mAh-Batterie 1 Stunde lang 2 A liefern. Wenn Ihr Quadcopter also 20A zieht, wird sein Flug für 2/20 * 60min = 6 Minuten fortgesetzt.
Die Nennentladung gibt die maximale Geschwindigkeit an, mit der Sie Strom aus der Batterie ziehen können. Es wird durch die Nummer "C" oben angezeigt. Je höher die Nennleistung C ist, desto mehr Strom kann die Batterie abgeben.
Beispielsweise kann eine 2000-mAh-25C-Batterie bis zu 2000 x 25 = 50.000 mA oder 50 A liefern.



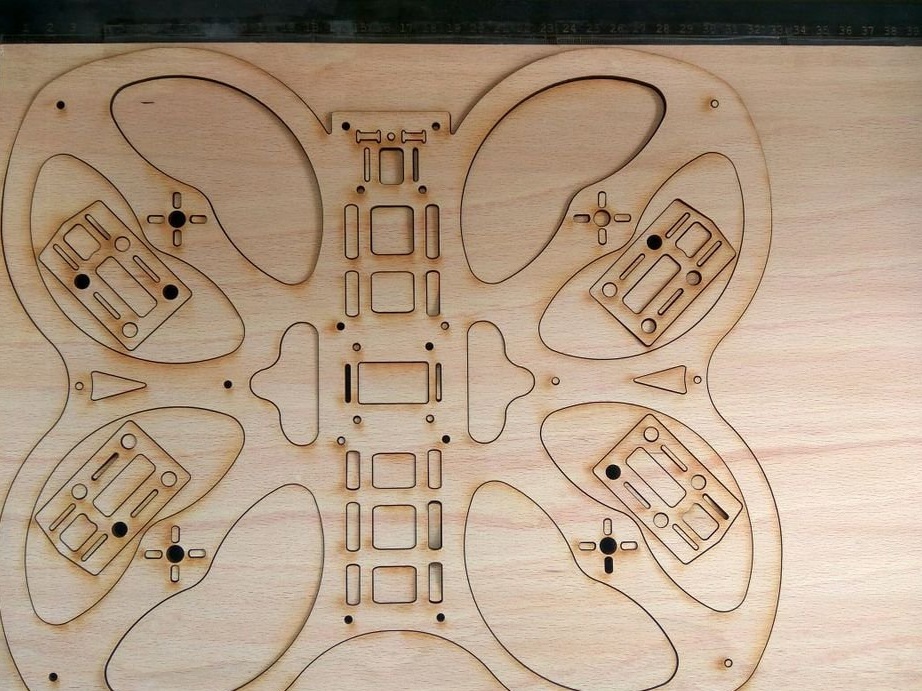
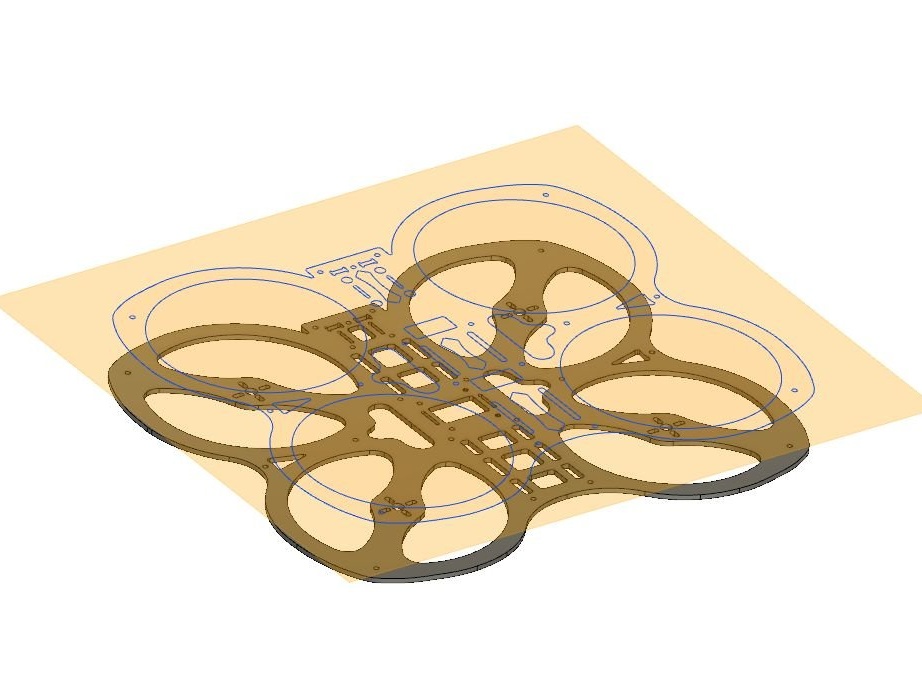
Schritt zwei: Design und Montage des Rahmens
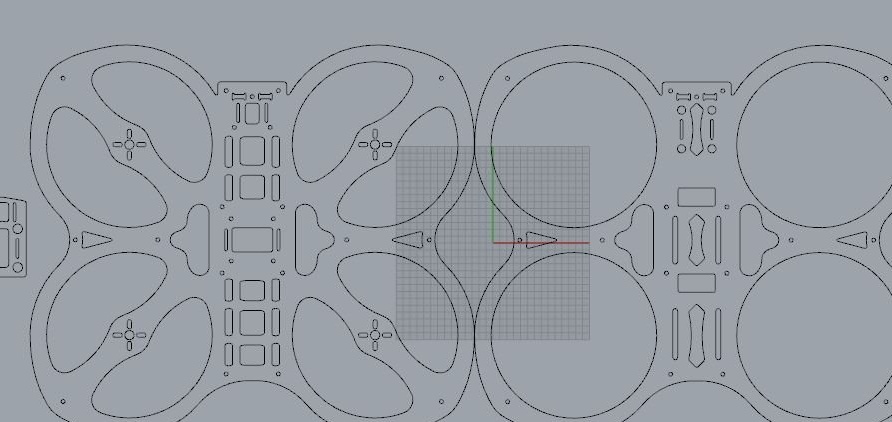
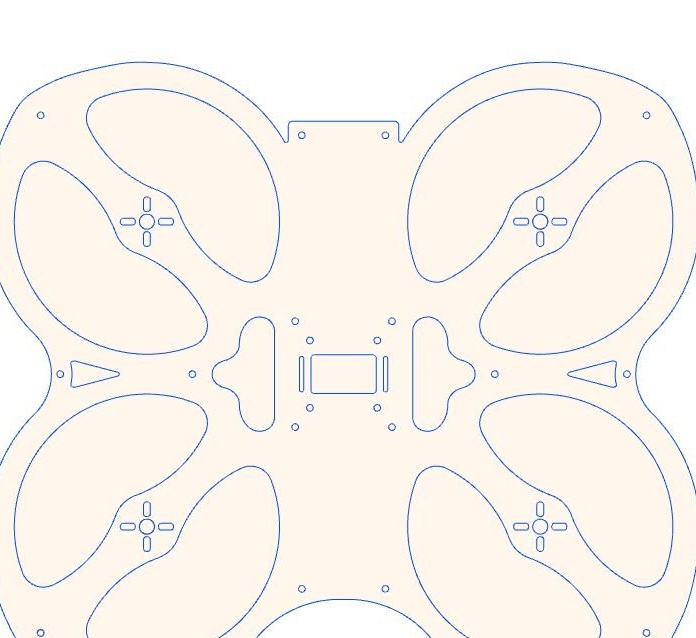
Das Rahmendesign wurde von der Monarchfalterform inspiriert.Wenn Sie den Rahmen von oben betrachten, sieht er aus wie zwei Flügel.
Der Assistent zeichnete das Design in Fusion 360 und Rhino CAD. Die Rahmengröße beträgt ca. 230 mm, was auf den diagonalen Abstand von einer Motornabe zur anderen zurückzuführen ist. Die beliebtesten Rahmengrößen sind 210 mm, 250 mm usw. Wenn Sie die Rahmengröße eingestellt haben, zeichnen Sie die Motorlager.
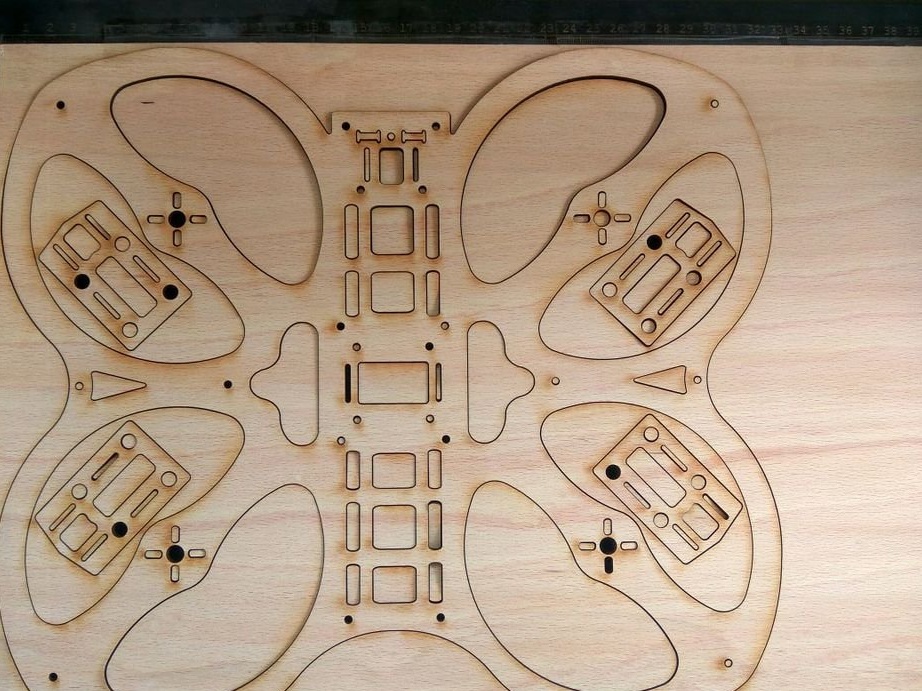
Das zentrale Gebäude ist der Ort, an dem die gesamte Elektronik installiert wird, einschließlich Flugsteuerung, Empfänger, Batterie usw. In der Mitte befinden sich 4 M3-Löcher in einem Abstand von 30,5 mm voneinander.
Der Artikel wird durch Laserschneiden hergestellt. Wenn Sie keinen Cutter haben, können Sie in der Werkstatt schneiden. Die Datei zum Schneiden kann unten heruntergeladen werden.
Datei Design.rar









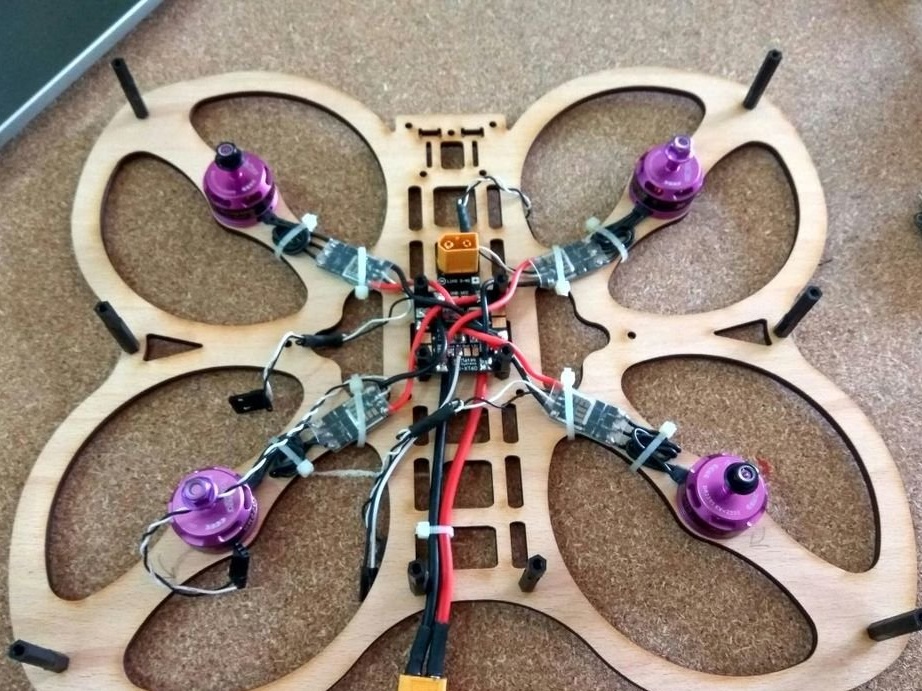
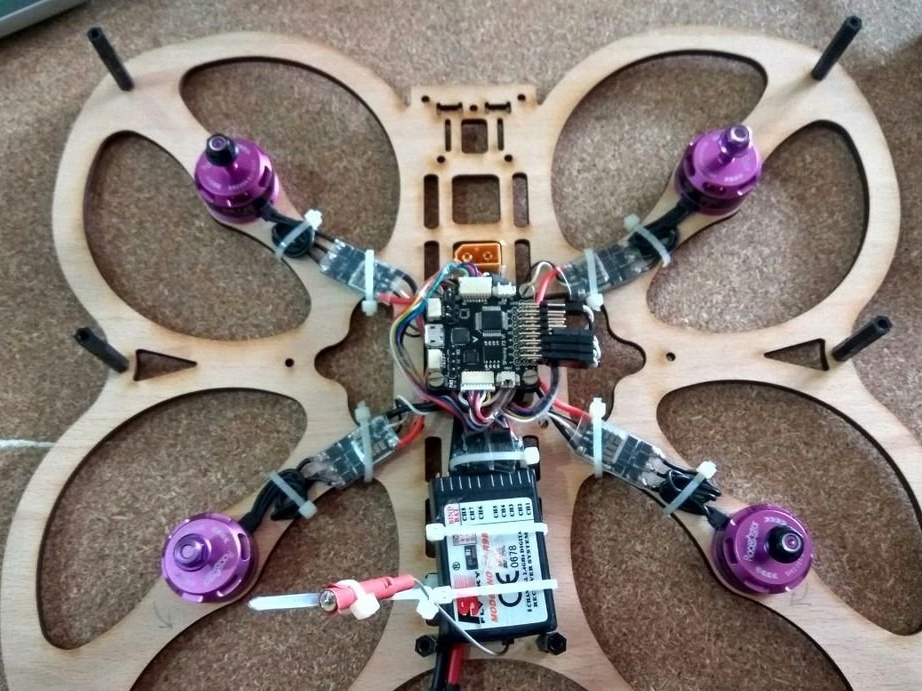
Schritt drei: Bauen
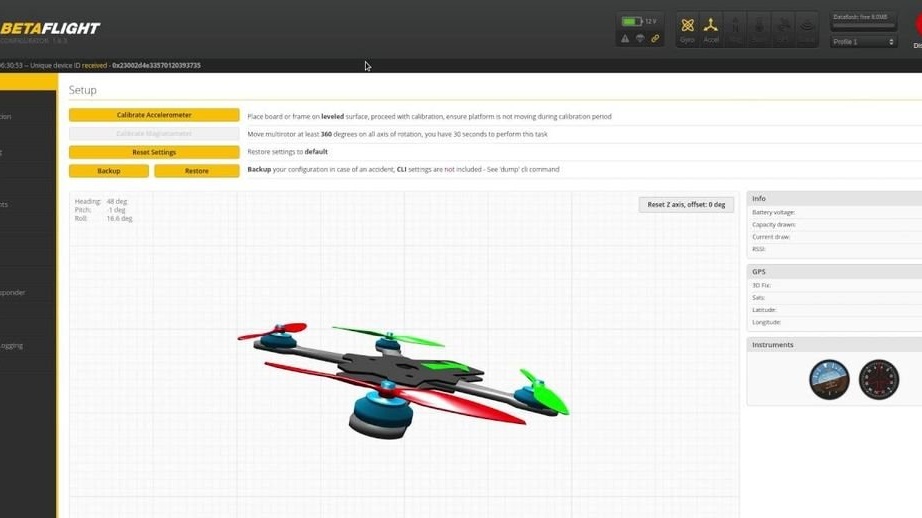
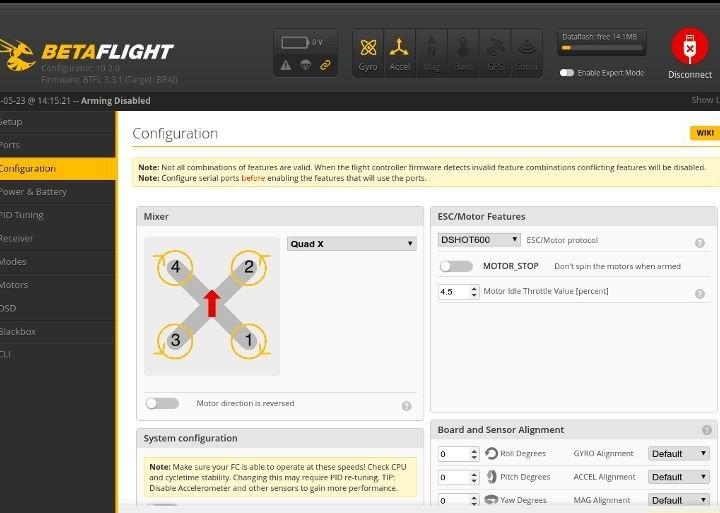
Jetzt müssen Sie einen Quadrocopter zusammenbauen.
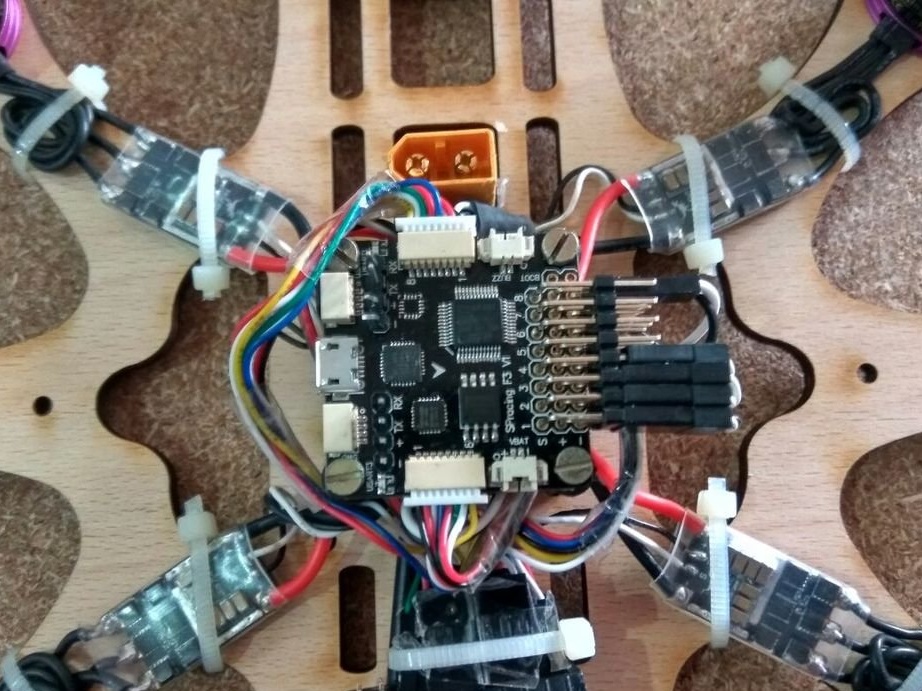
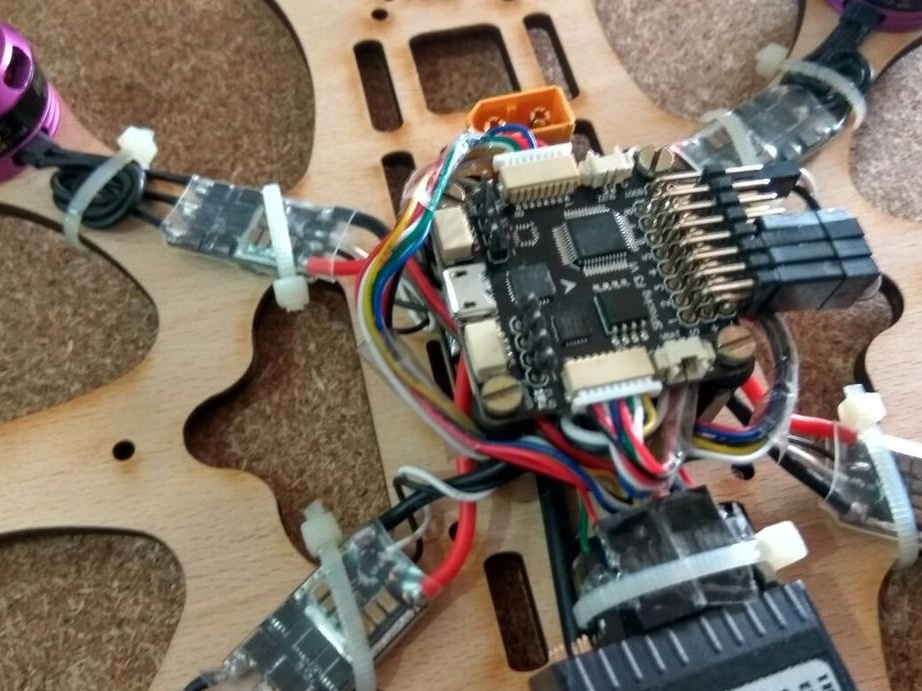
Zuerst müssen Sie den Controller mit der Betaflight-Firmware flashen. Kalibrieren Sie dann den Sensor. Schließen Sie das Funkmodul an und überprüfen Sie seine Funktion. Montieren Sie die Motoren gemäß der Abbildung des X-Rahmens mit der richtigen Drehrichtung am Rahmen. Löten Sie die Motorkabel zu den ESC-Klemmen und befestigen Sie den ESC an der Halterung. Bringen Sie die Stromverteilungsplatine an und löten Sie die ESC-Pads. Schließen Sie den Soler XT60 an das Netzkabel und dann an die Stromverteilungsplatine an. Reparieren Sie den Controller. Verbinden Sie die Kabel vom Regler mit dem Flugregler. Montieren Sie den Empfänger am Rahmen. Setzen Sie die obere Abdeckung auf.