


In diesem Artikel erklärt uns der Assistent, wie er einen Roboter-Barkeeper hergestellt hat, der von einem Smartphone gesteuert wird.
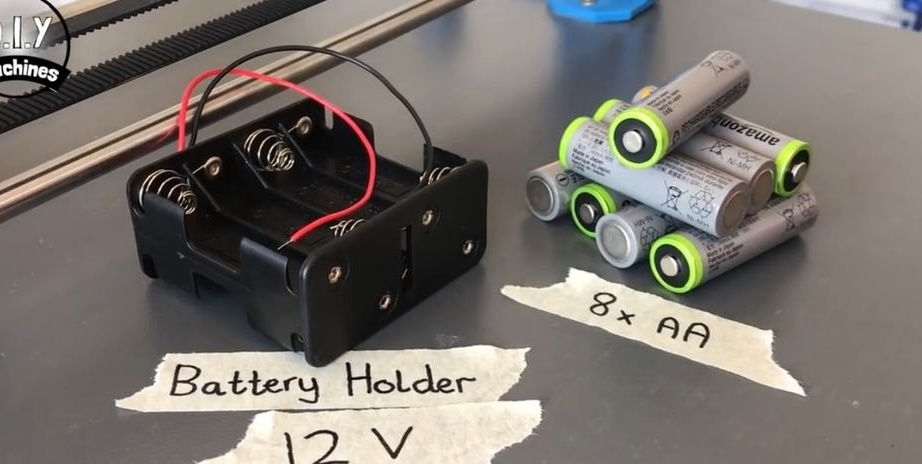
Merkmale des Geräts: Arbeit an Arduino, erschwinglicher Preis, Bluetooth-Steuerung von jedem Gerät aus, Autonomie (Arbeit mit 8 AA-Batterien).
Um ein solches Gerät zu erstellen, verwendete der Master Folgendes
Materialien und Werkzeuge:
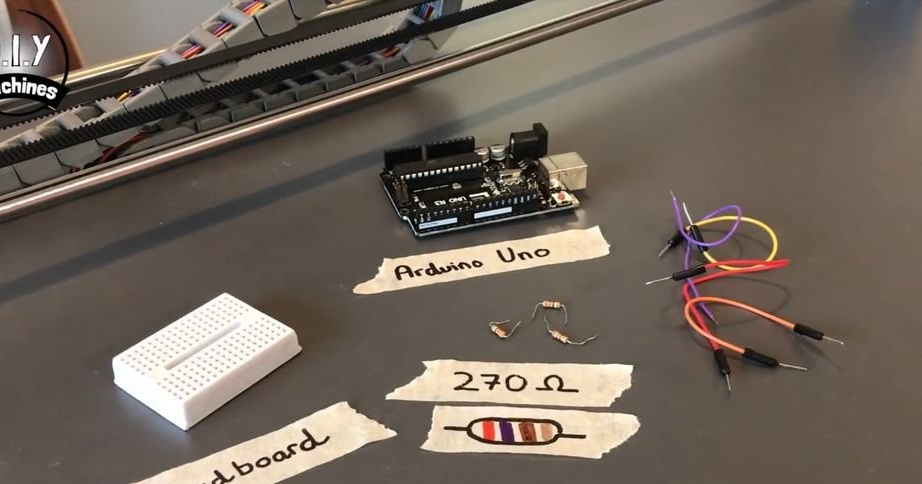
-Arduino Uno;
-Treibermotor L293D;
- Kontaktschalter;
-Linearlager;
-Schrittmotor;
- Riemen und Riemenscheibe (Version 2m);
- Riemen und Riemenscheibe (Version 5m);
-HM10 Bluetooth-Modul;
-Ein Schraubendreher;
-Fasteners;
-Legs;
-Tisch oben;
-3D Drucker;
-Metallstangen;
- Schraubendreher;
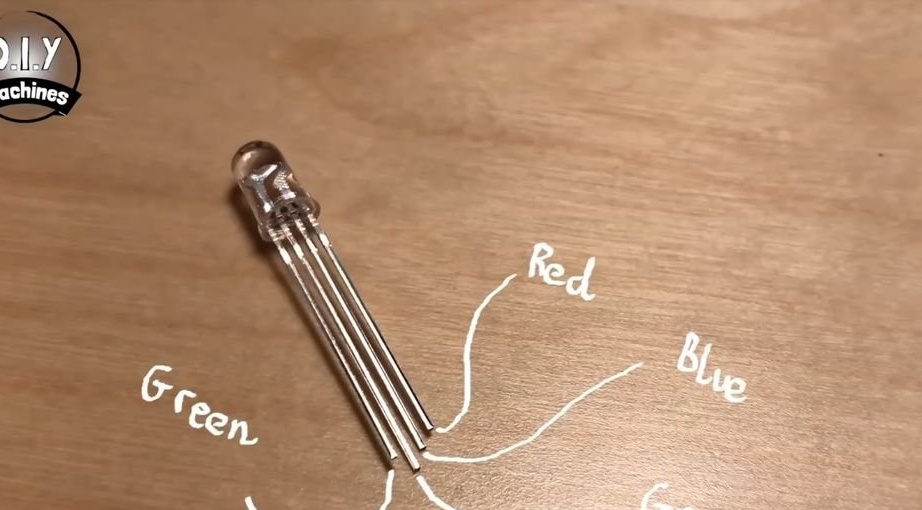
- RGB-LED;
-Wire;
-Lötzubehör;
-Izolenta;
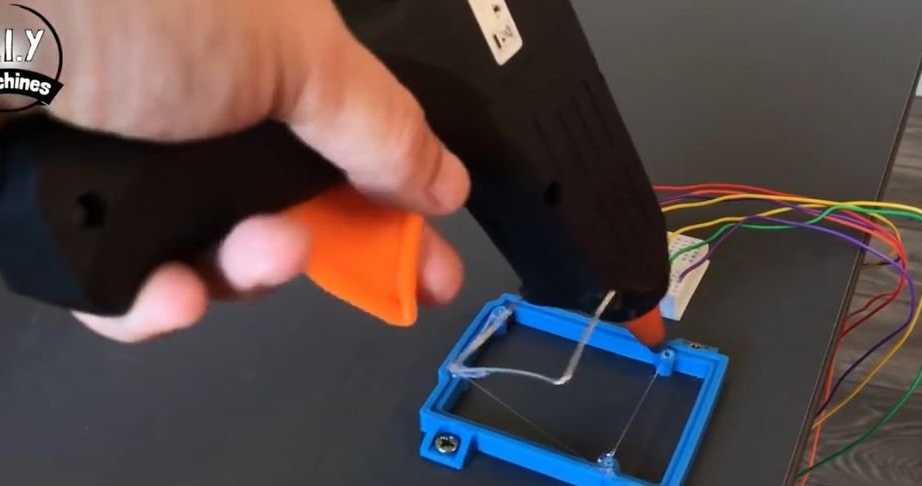
-Kleberpistole;
-Batteriefach;
-Verbinder;
-Batterien;
-Computer mit Software;
- Halter für Flaschen;
Ventil
-Flaschen;
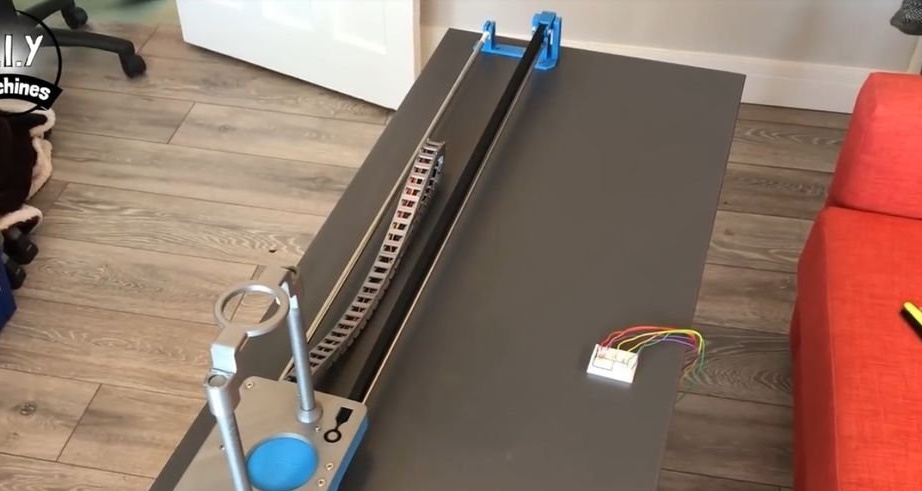
Erster Schritt: Der Tisch
Zuerst sammelt der Meister die Tabelle. Tischgröße 120 * 45 cm. Tischdicke 18 mm.


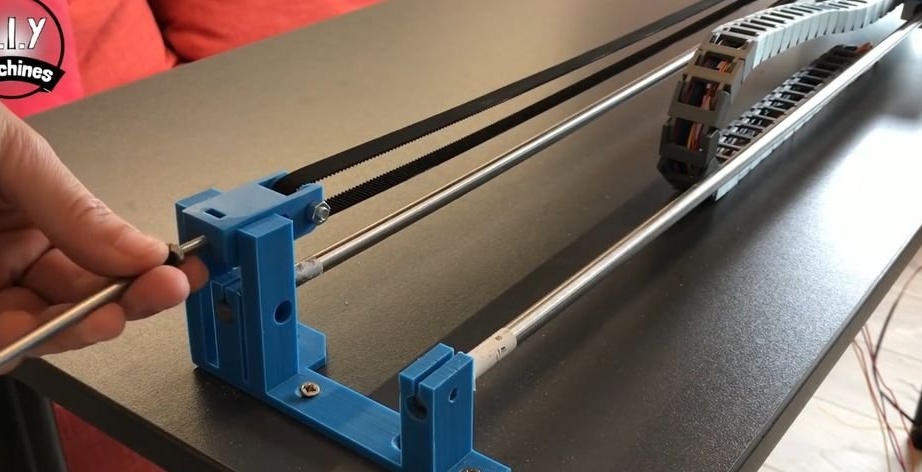
Schritt zwei: Spanner
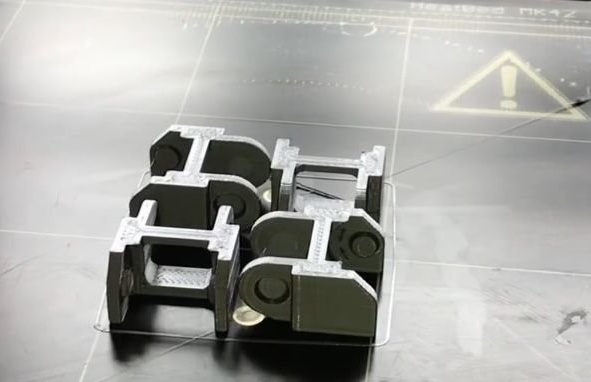
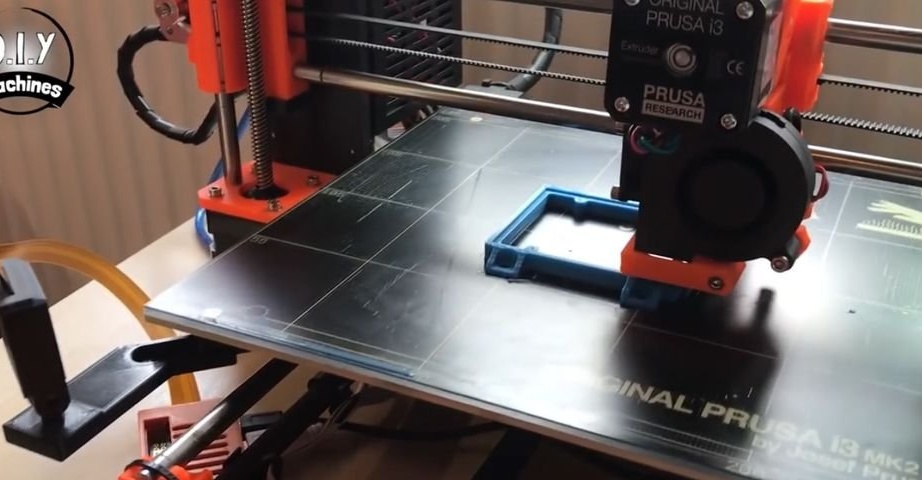
Dateien zum Drucken von Teilen können unten heruntergeladen werden.
3D-Druckdateien.
Jetzt müssen die ersten beiden Details "idler.stl" und "Rod_Clamp_V5.stl" gedruckt werden.
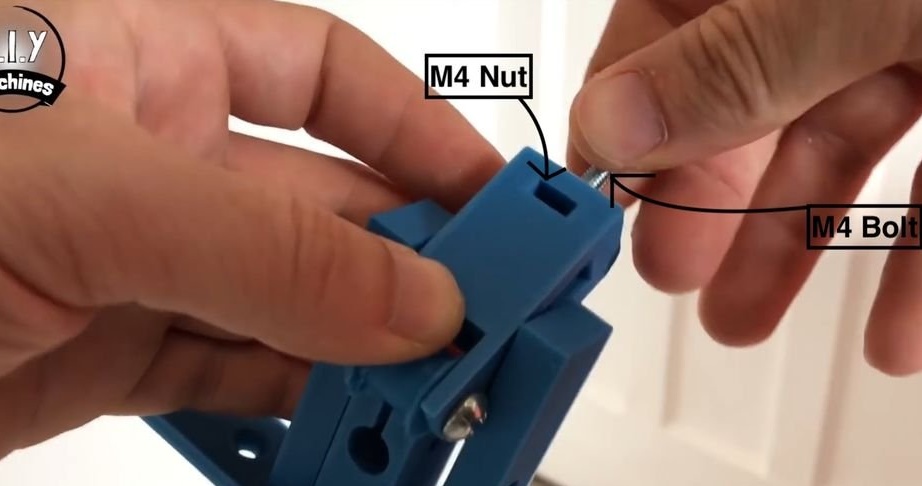
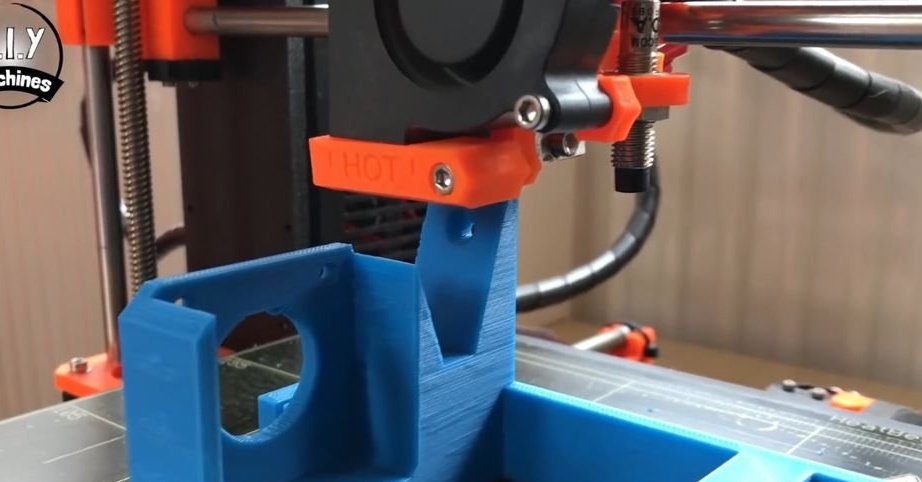
Nach dem Drucken muss die Spannrolle mit einer langen M4-Schraube und Mutter an der Spindelklemme befestigt werden. Eine starke Klemmung ist nicht erforderlich, da sich die Walze frei drehen muss.
Dann werden die beiden Teile zusammengefügt.
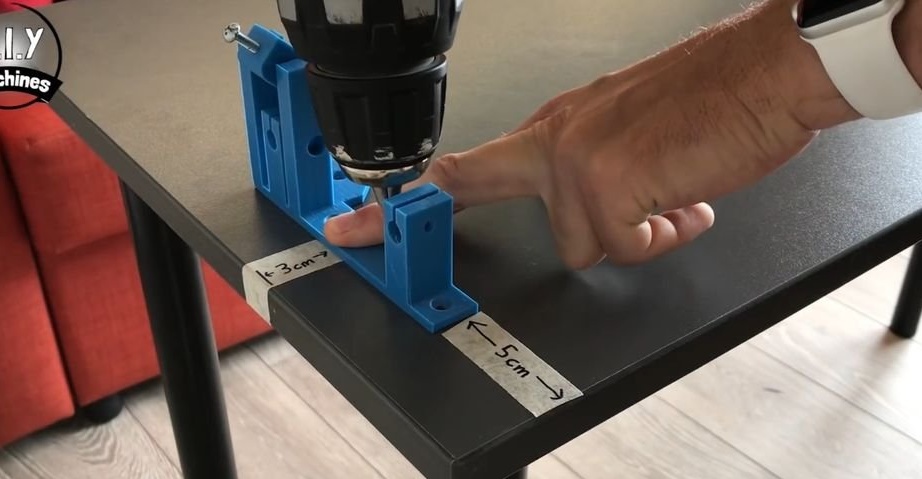
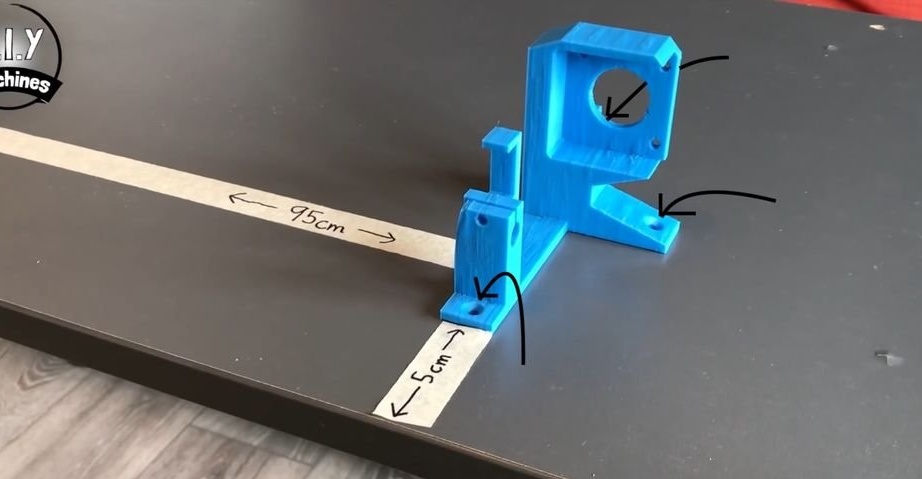
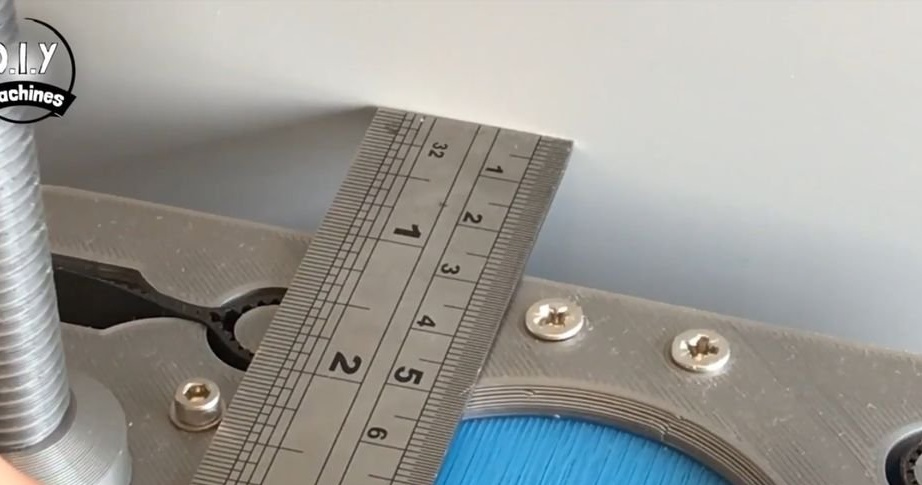
Markiert auf einem Tisch 3 cm vom linken kurzen Ende und 5 cm von der Vorderkante entfernt und spannt den Spanner.

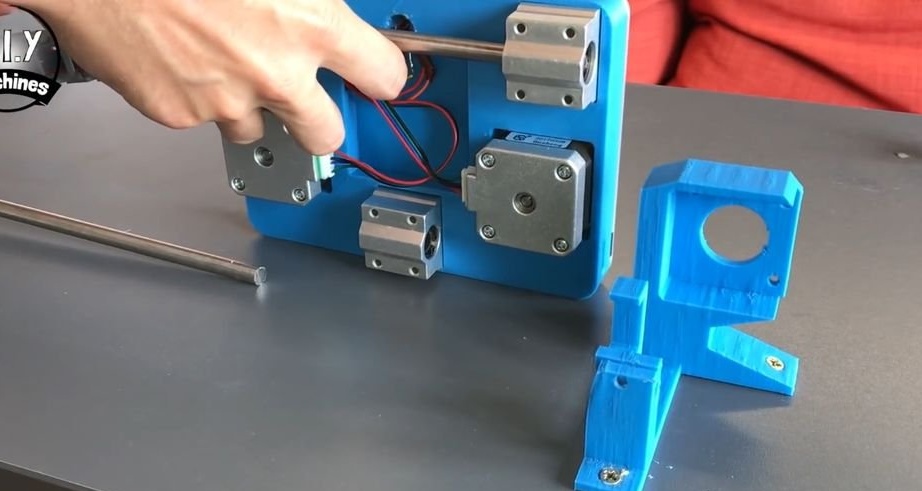
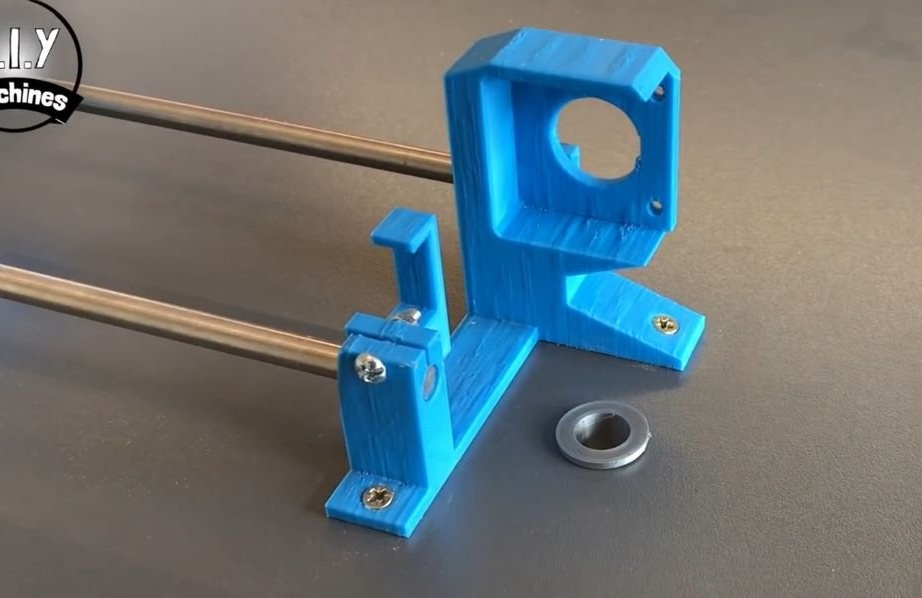
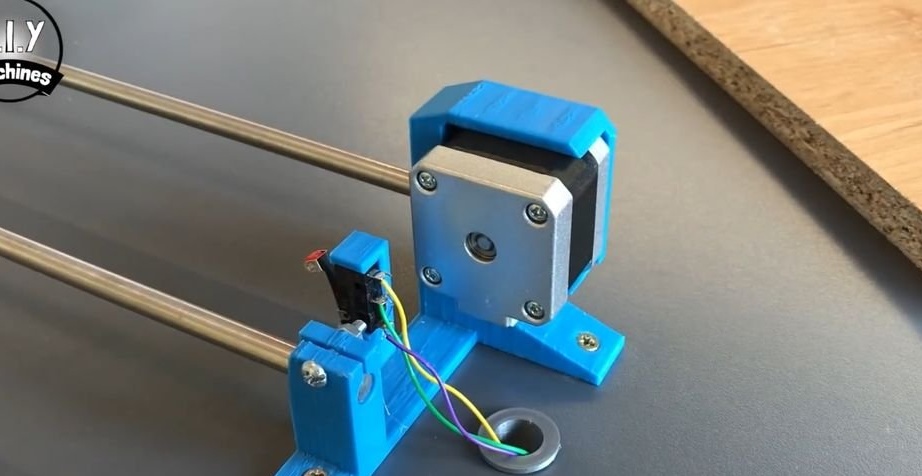
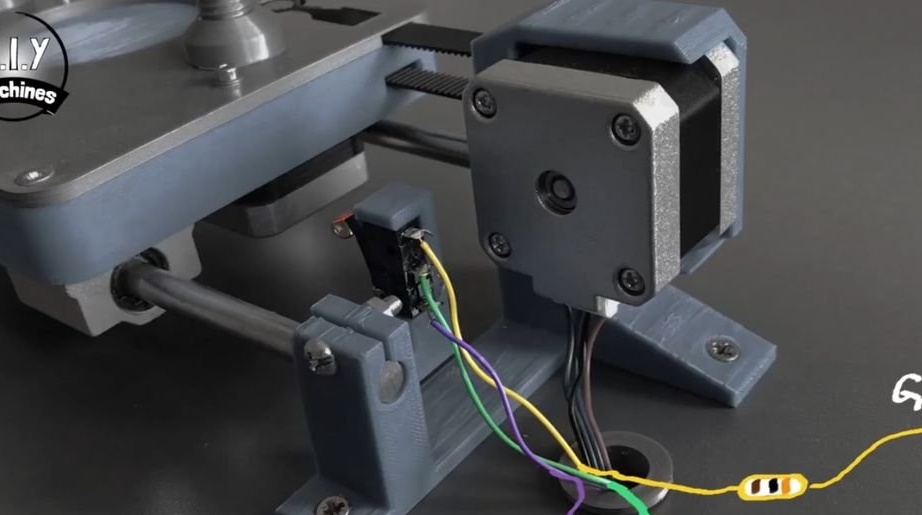
Schritt zwei: Motorhalterung
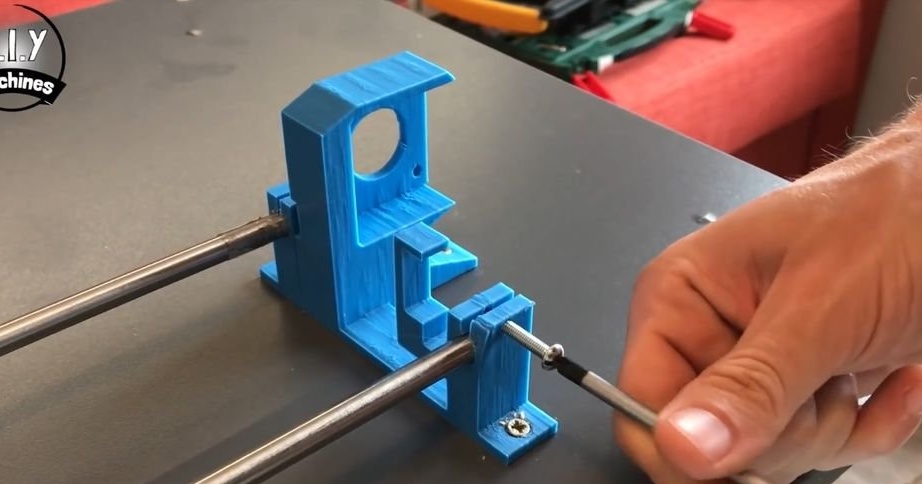
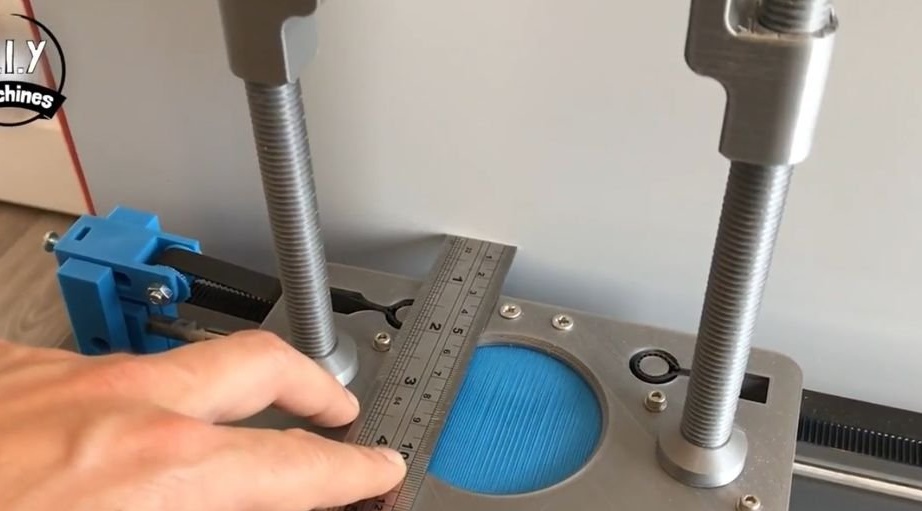
Druckt die Motorhalterung in der Datei "X_Axis_Motor_Mount.stl". Wird auf der Tischplatte in einem Abstand von 95 cm vom Spanner und 5 cm von der Tischkante befestigt.
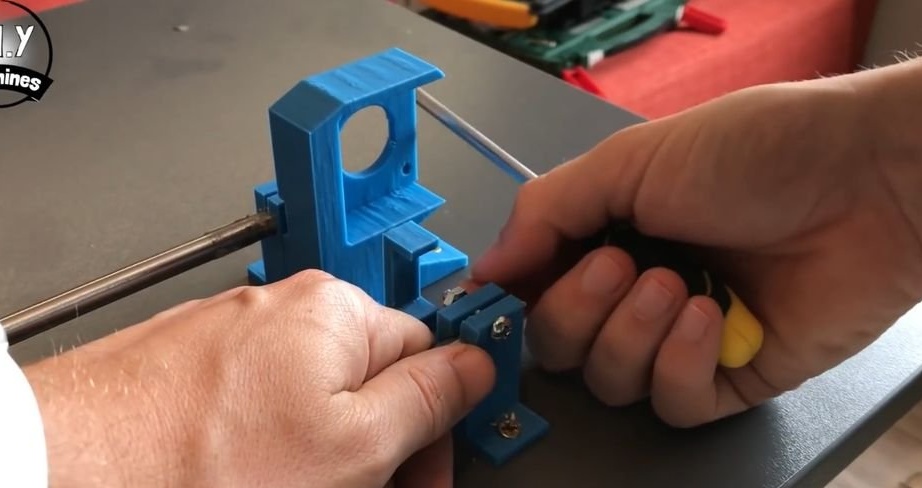
Schritt drei: Anleitungen
Legt Hilfslinien fest. Die Länge der Stangen beträgt 1 Meter.
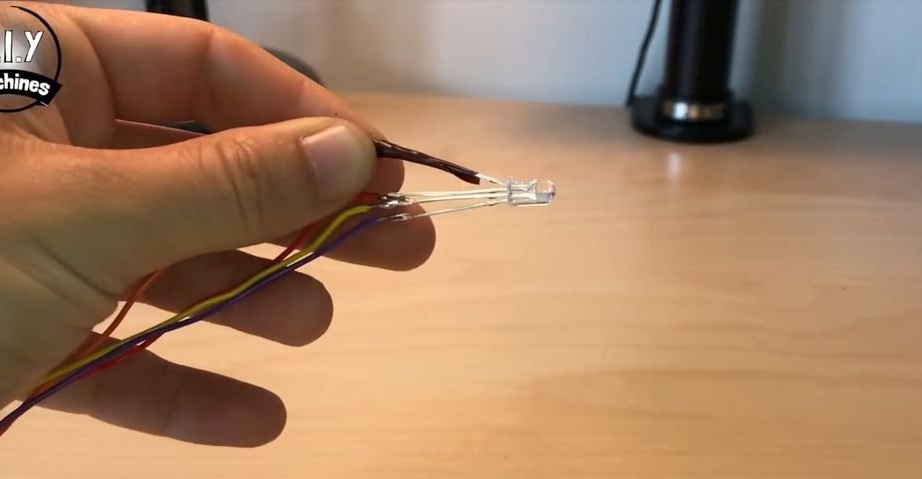
Schritt vier: LED
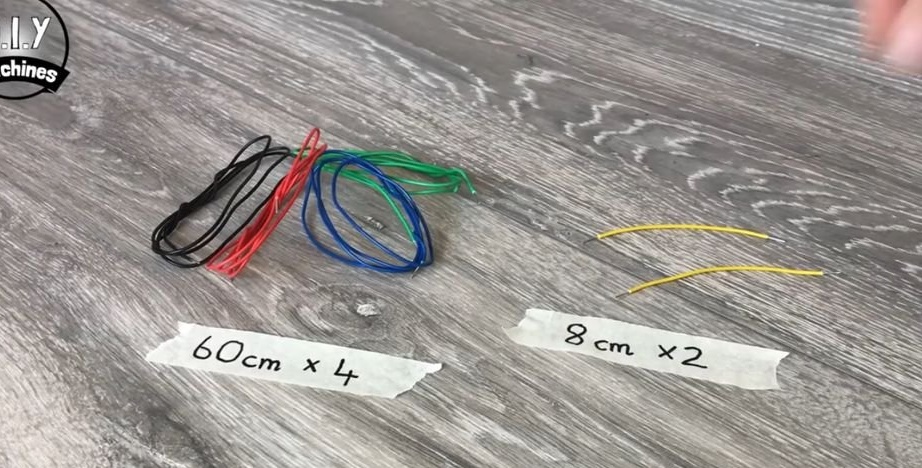
Der Master verwendet die RGB-LED zur Anzeige. Löten Sie 180 cm Drähte in verschiedenen Farben an jedes Bein. Die Verbindungsstelle isoliert.




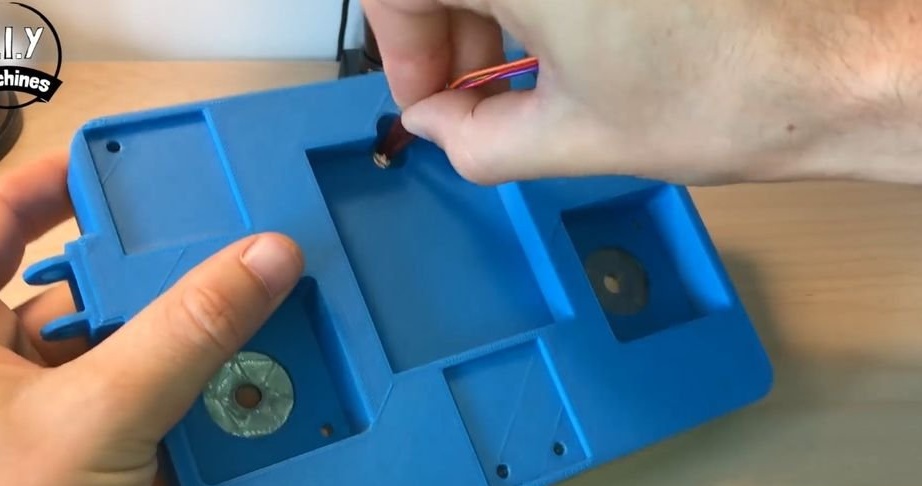
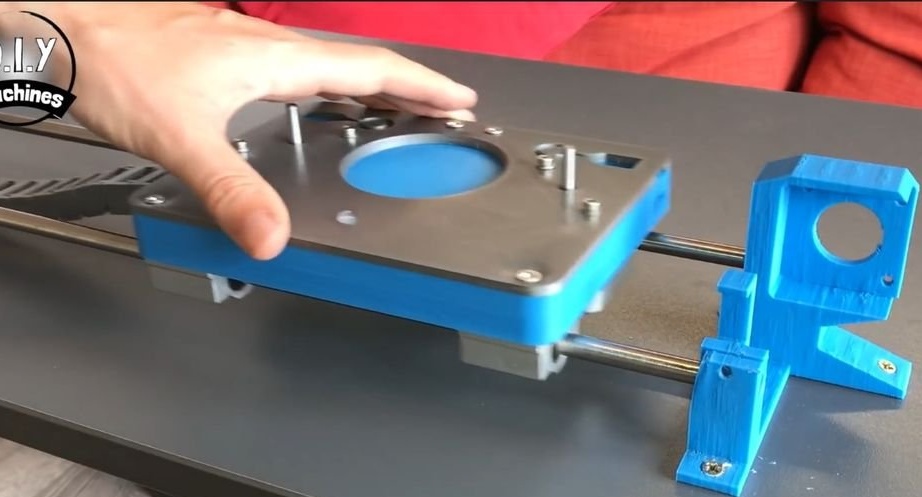
Fünfter Schritt: Plattform
Druckt den Teil 'slider_base_v3.stl'. Behebt eine LED. Installiert Schrittmotoren.
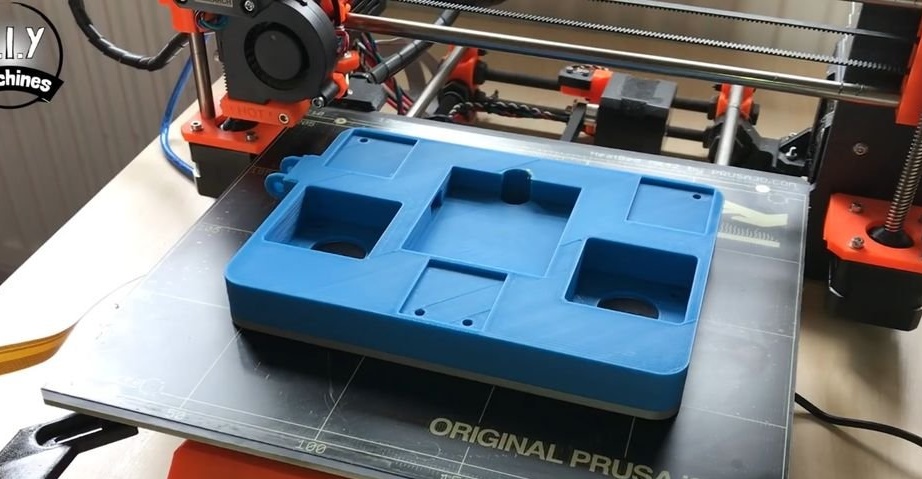

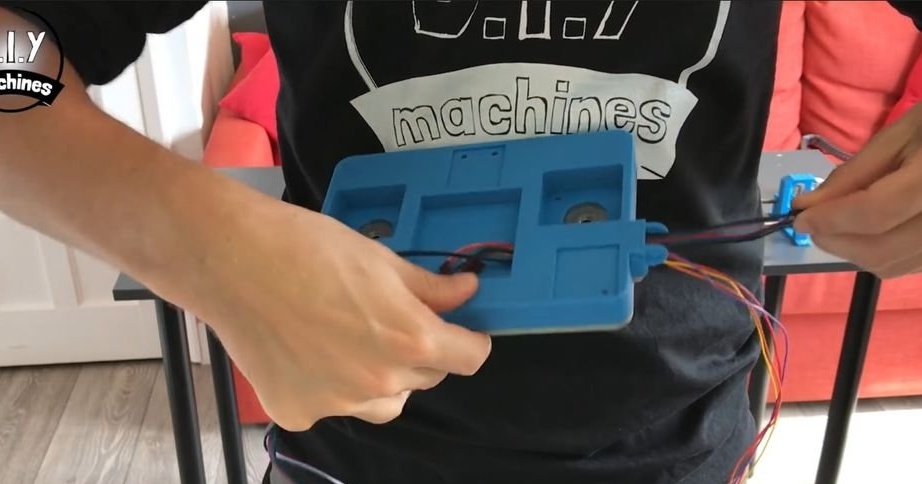
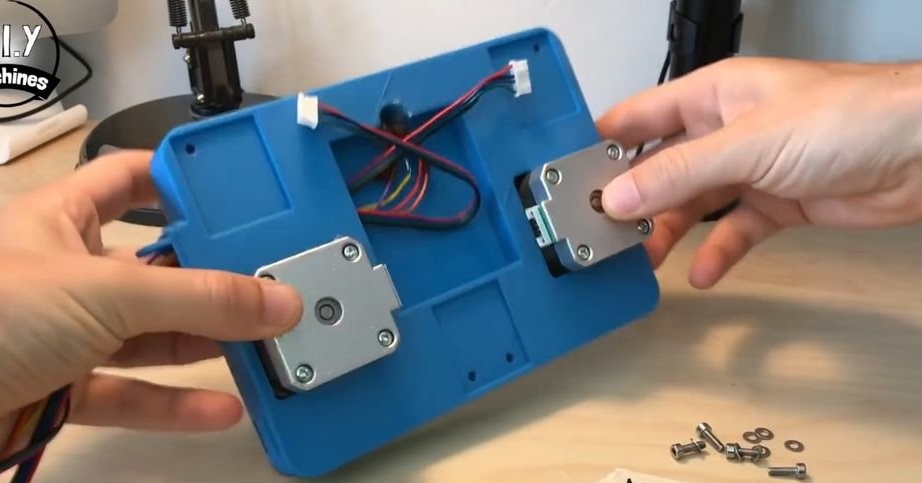
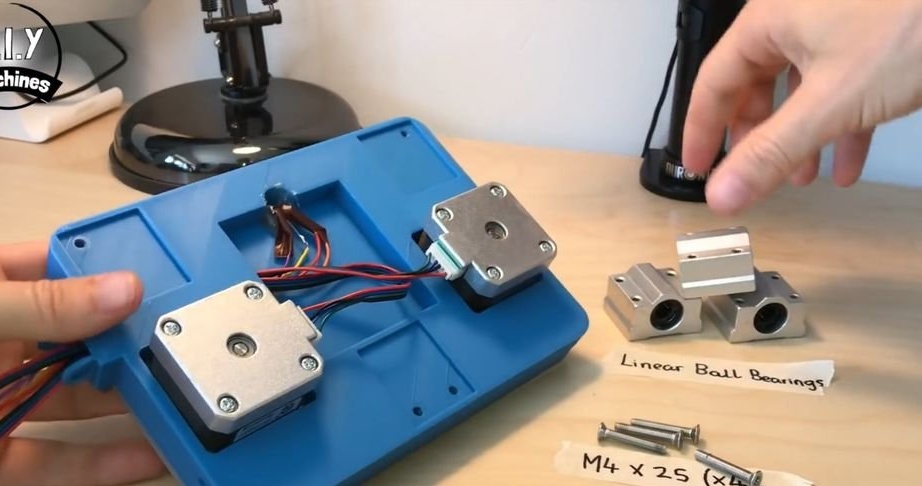
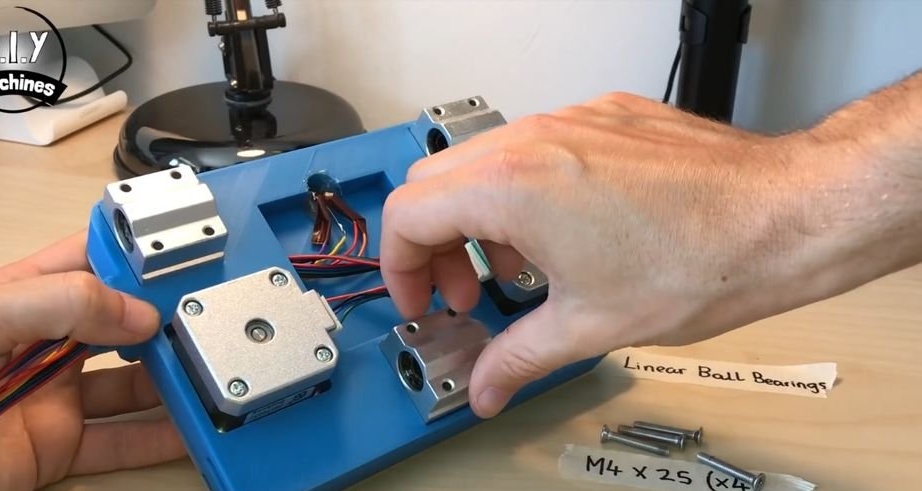
Installiert Linearlager.
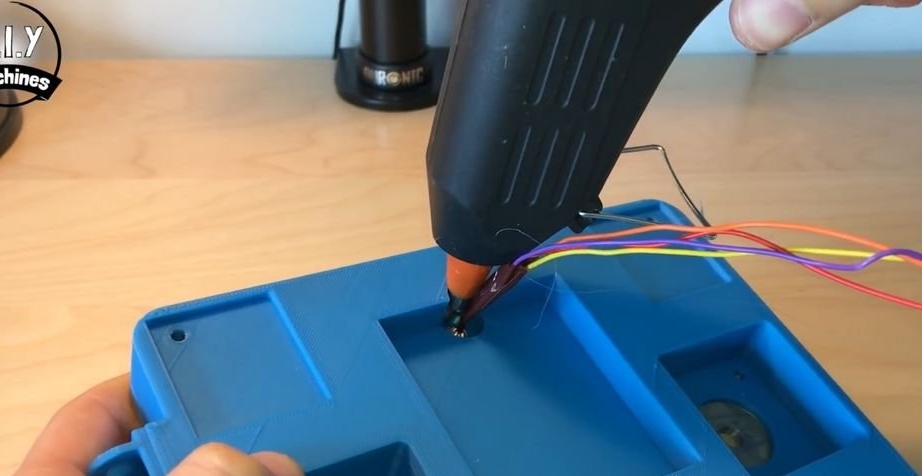
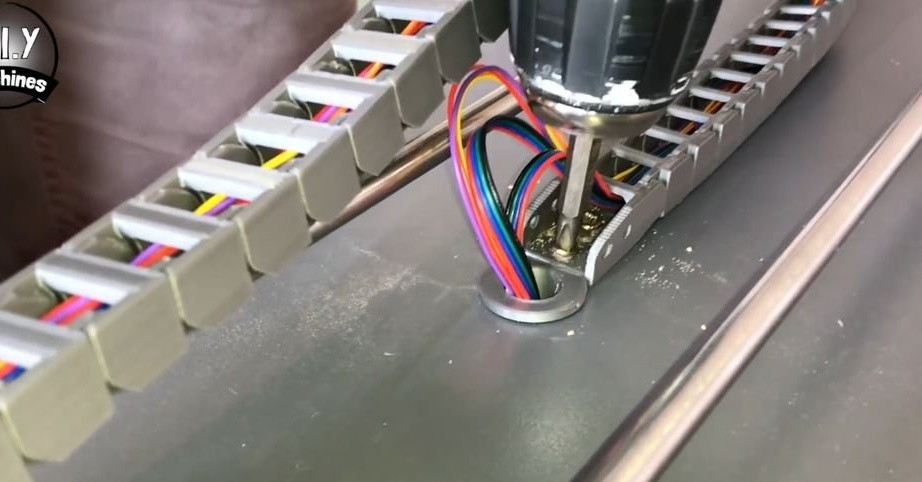
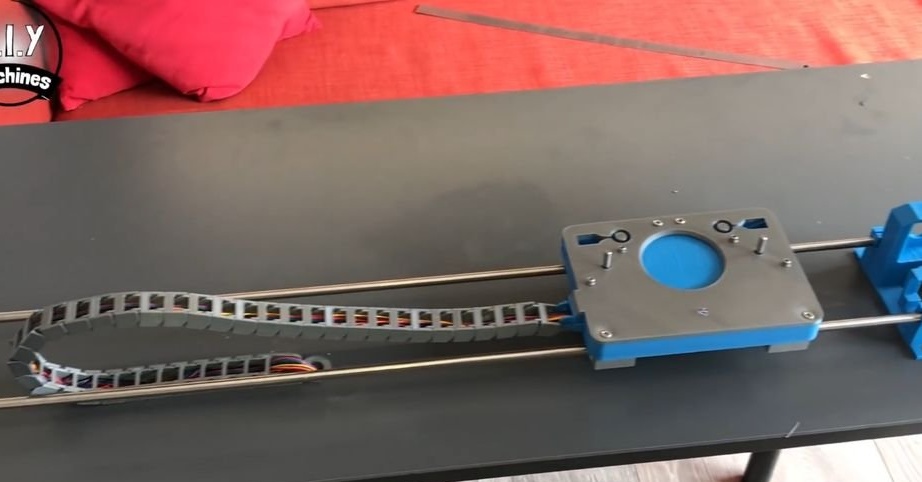
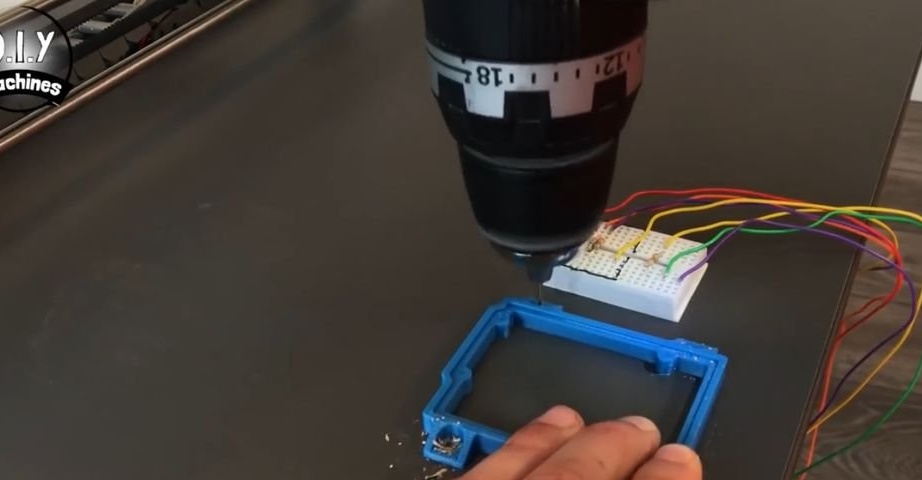
Schritt Sechs: Kabelkanal
Der Kabelkanal für das Gerät besteht aus separaten Segmenten, die in einem einzigen Stromkreis verbunden sind.Innerhalb der Schaltung werden Drähte verlegt. Die Kette ist beweglich und biegt sich bei Bedarf. Kettensegmente werden ebenfalls auf dem Drucker gedruckt.


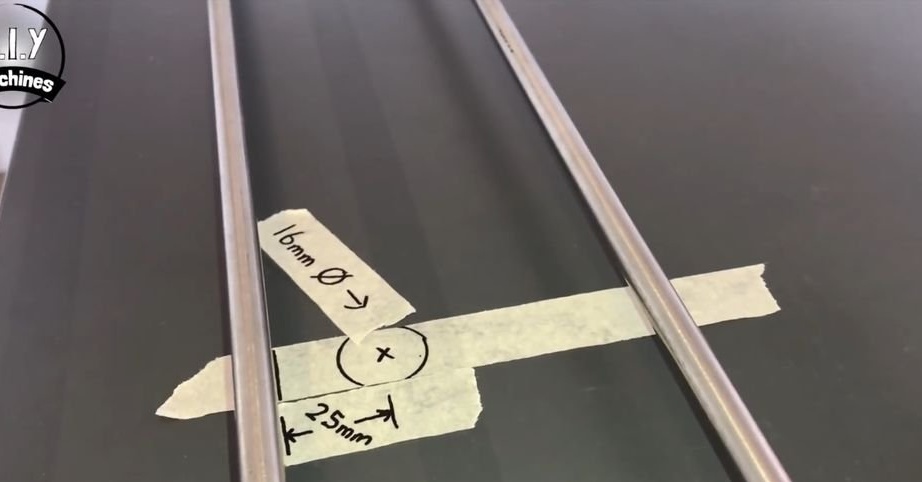
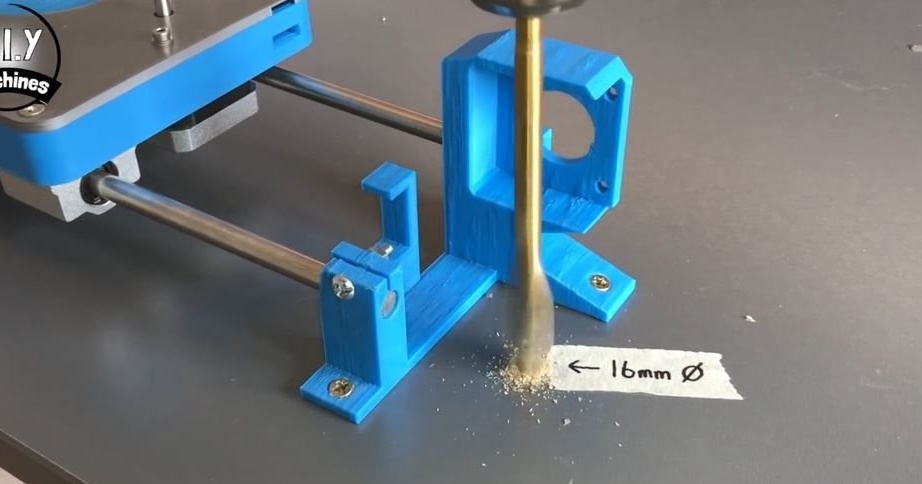
Bohren Sie in einem Abstand von 25 mm von der äußersten Führung und 47 cm vom Spanner ein Loch von 16 mm. Fügt die Hülse "Table_Tidy.STL" in das Loch ein. Befestigt den Kabelkanal an einem Ende der Plattform und am zweiten Ende der Arbeitsplatte neben der Hülse. Dehnt Drähte.



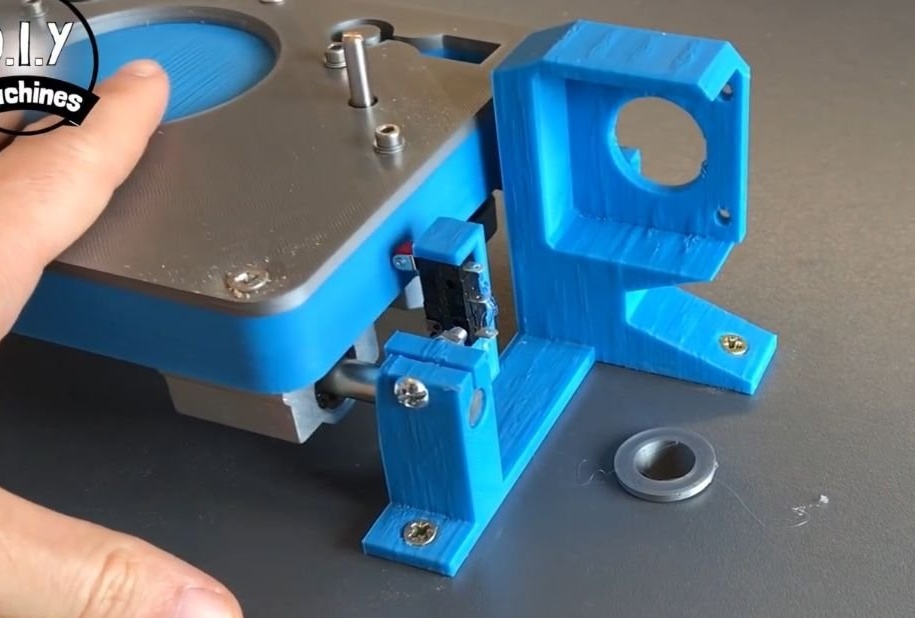
Siebter Schritt: wechseln
Neben der Motorhalterung wird ein weiteres 16-mm-Loch gebohrt. Fügt eine Hülse ein. Befestigt den Anhänger an der Halterung. Löten Sie 1 Meter Draht an die Kontakte.

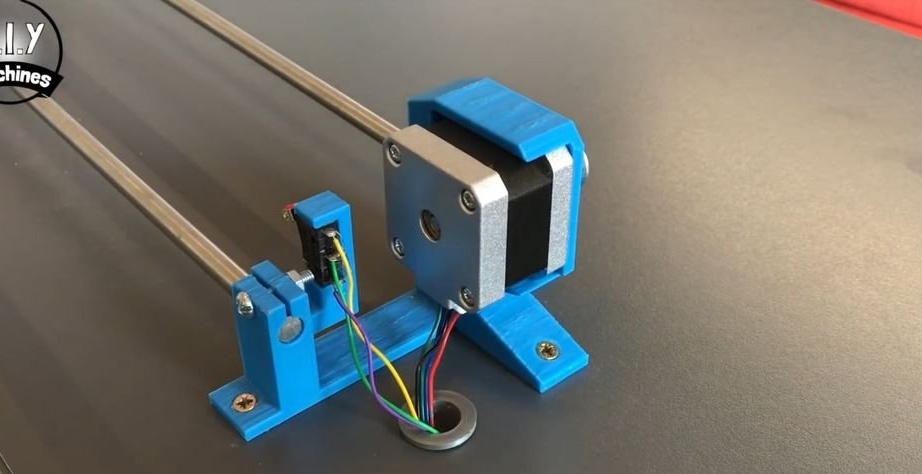
Schritt acht: X-Achsen-Motor
Sichert die Montage des Motors.

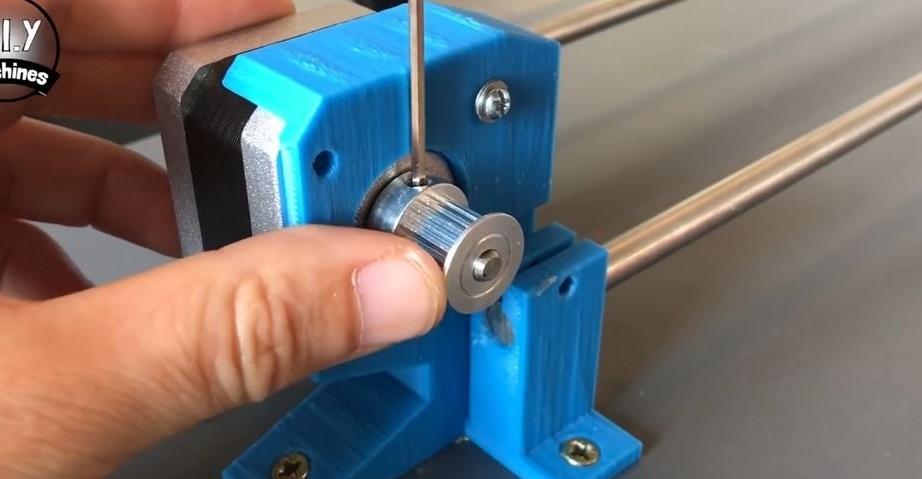
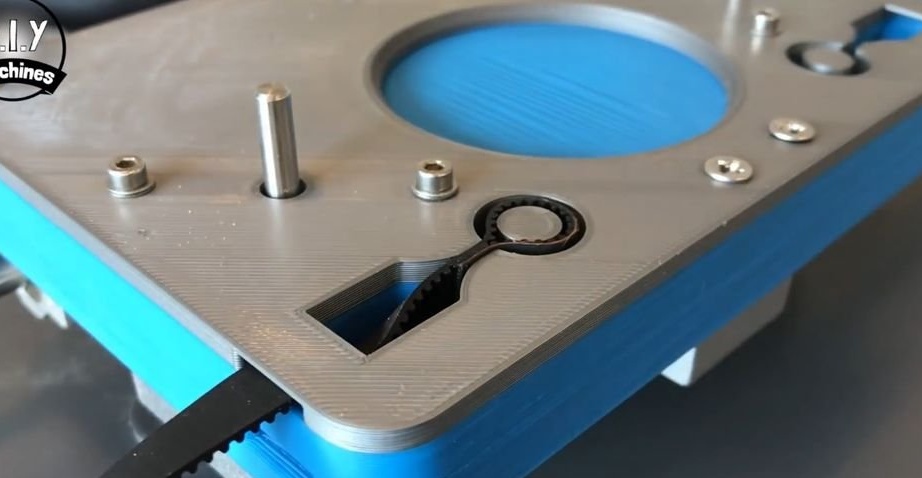
Schritt neun: Gürtel
Befestigt die Riemenscheibe an der Motorwelle. Befestigt das Ende des Riemens an den Plattformhaltern. Zieht den Riemen durch die Riemenscheibe und durch die Spannrolle. Befestigt das zweite Ende an den Haltern. Bei Bedarf kann die Riemenspannung durch Anziehen oder Lösen der Schraube eingestellt werden.







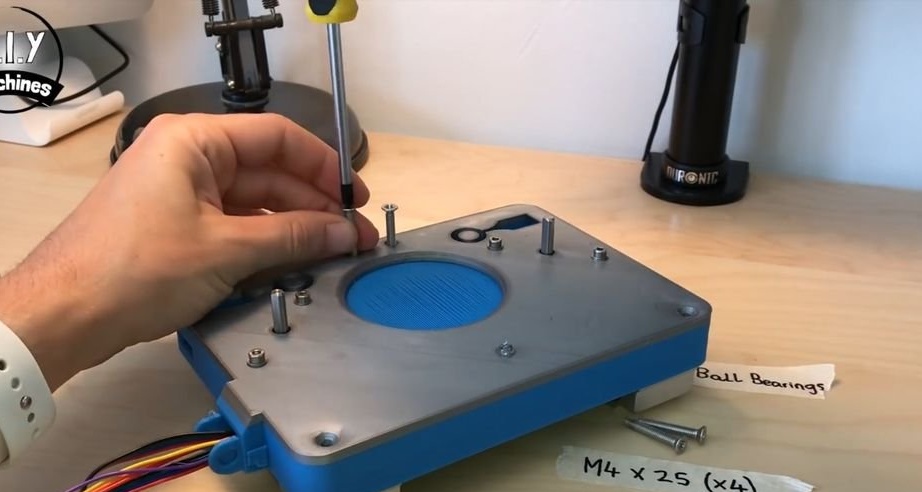
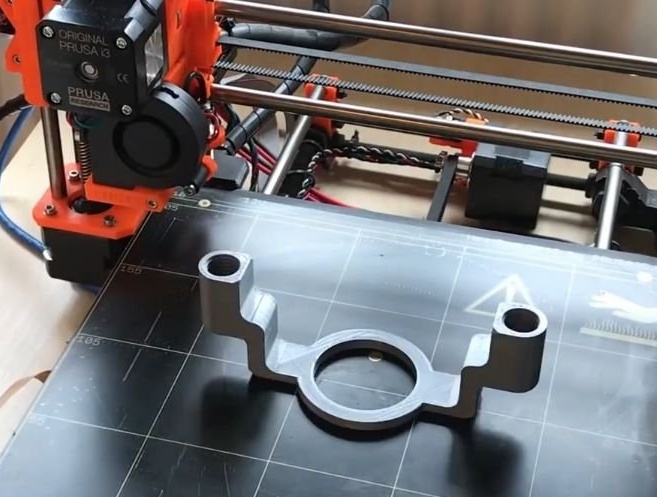
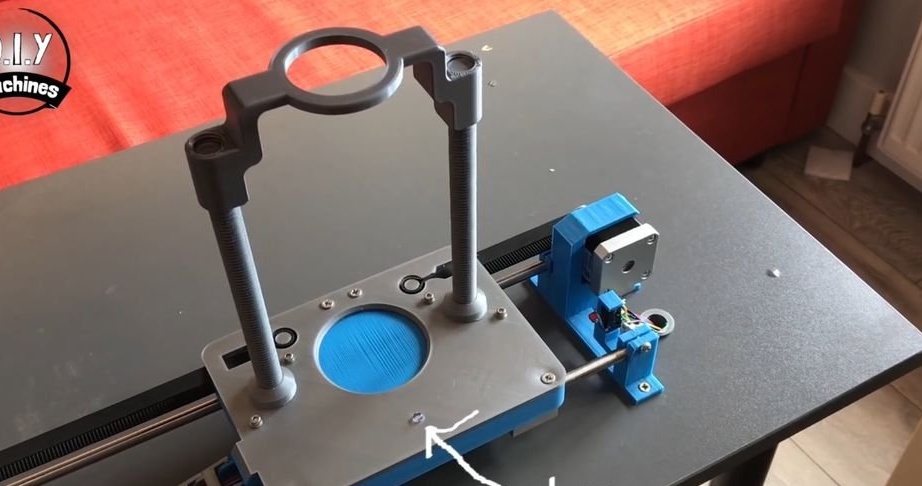
Schritt zehn: Getränkehalter
Druckt zwei Gewindestangen main_rod2.3.STL und Halter Dispenser_Paddle_V2.STL. Wird auf einer Plattform befestigt.



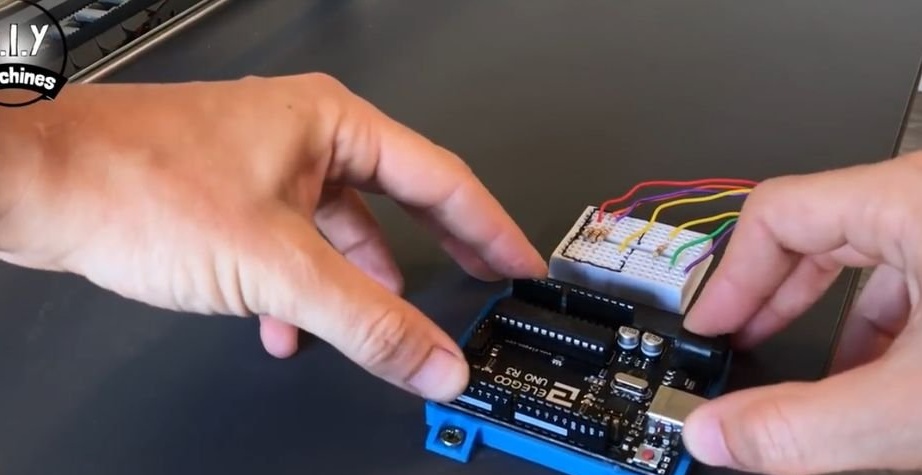
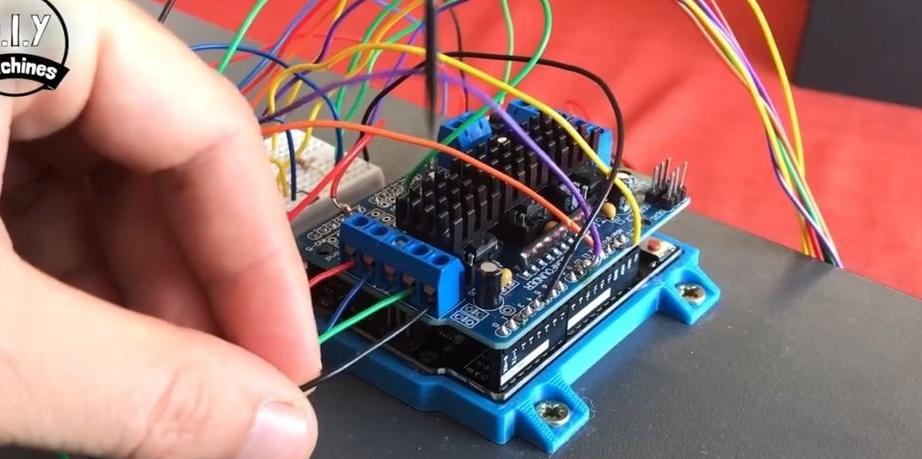
Schritt elf: Anzeige, Anhänger, Steckbrett
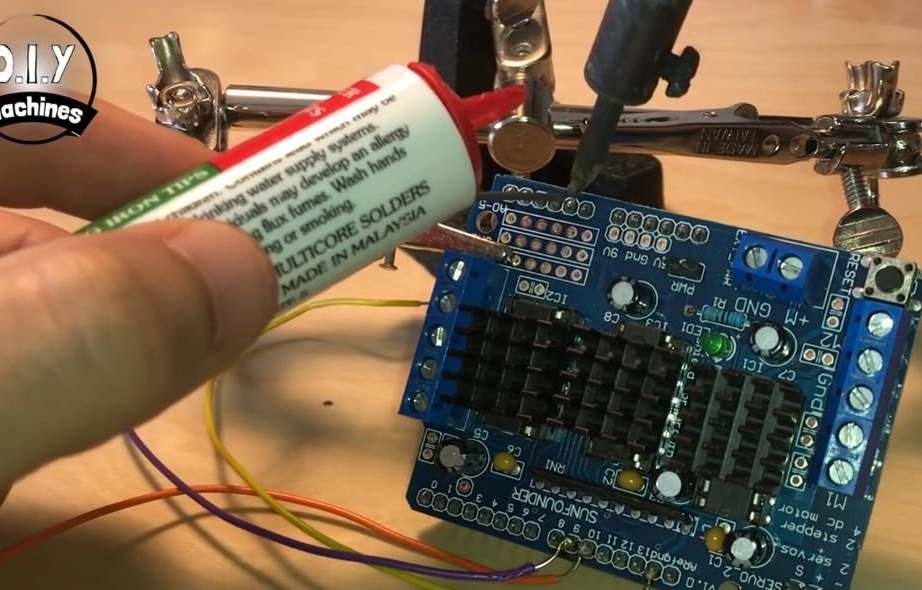
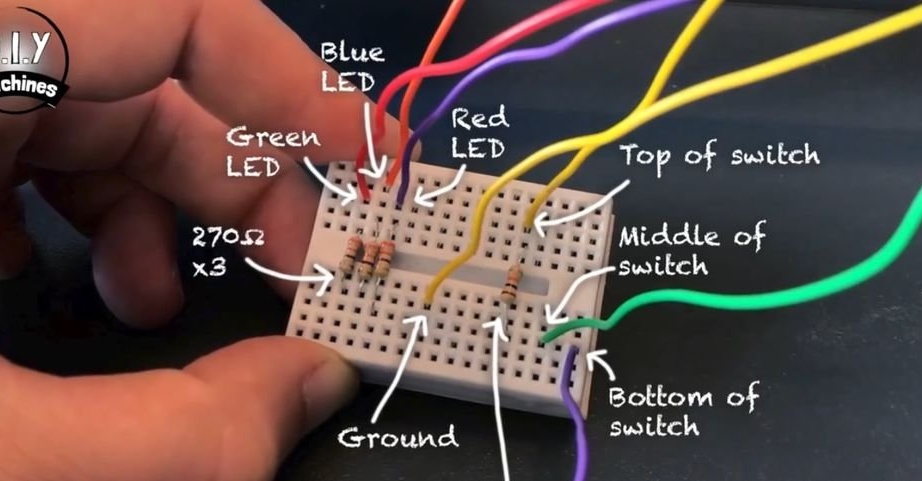
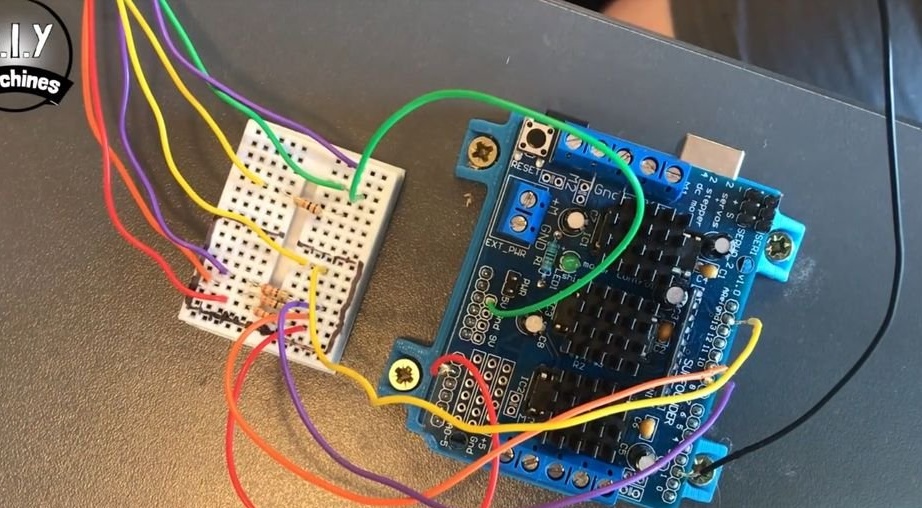
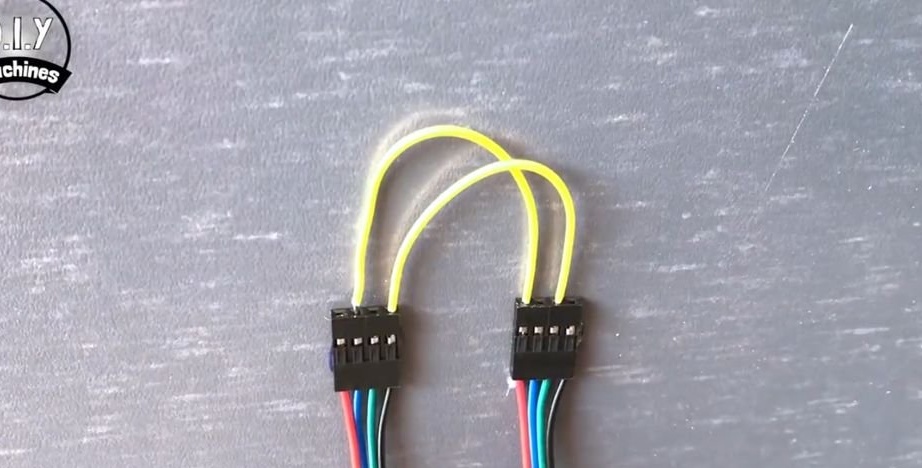
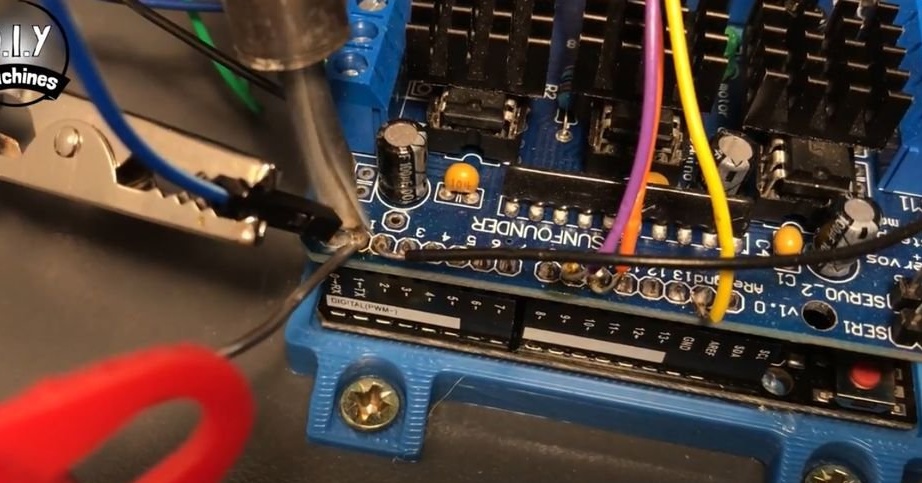
RGB LED, hat vier Beine. Ein Bein ist üblich und drei farbig. Der Master nimmt vier weitere Drähte mit einer Länge von jeweils etwa 15 cm und verlötet sie wie folgt (durch die Farben des LED-Glühens) mit dem Motortreibermodul:
Rot an Pin D9
Blau an Pin D10
Grün an Pin A1
Die Kathode zum GND-Pin.
Es verbindet den Anhänger: Der obere Kontakt ist GND, der mittlere Kontakt ist 5 V, der untere Kontakt ist Ausgang Nr. 2.
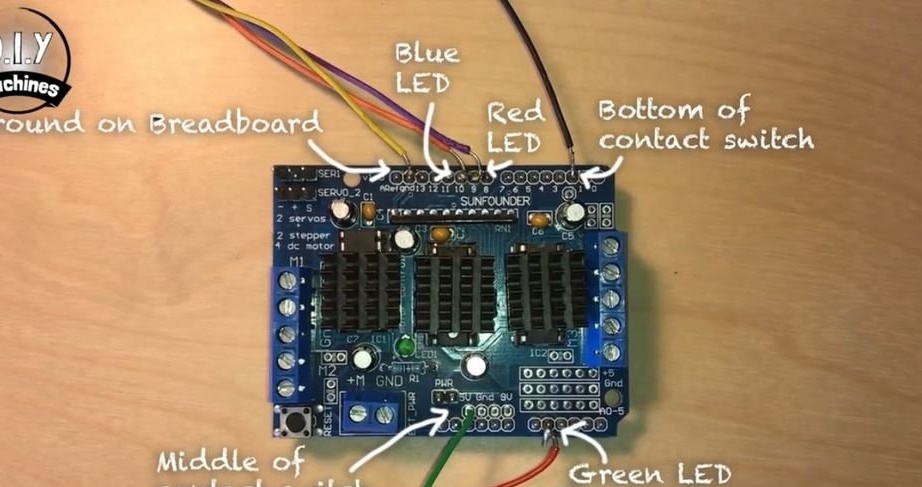
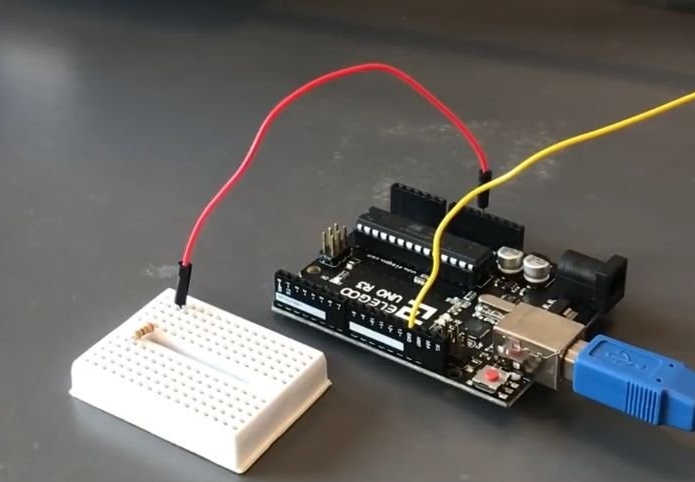
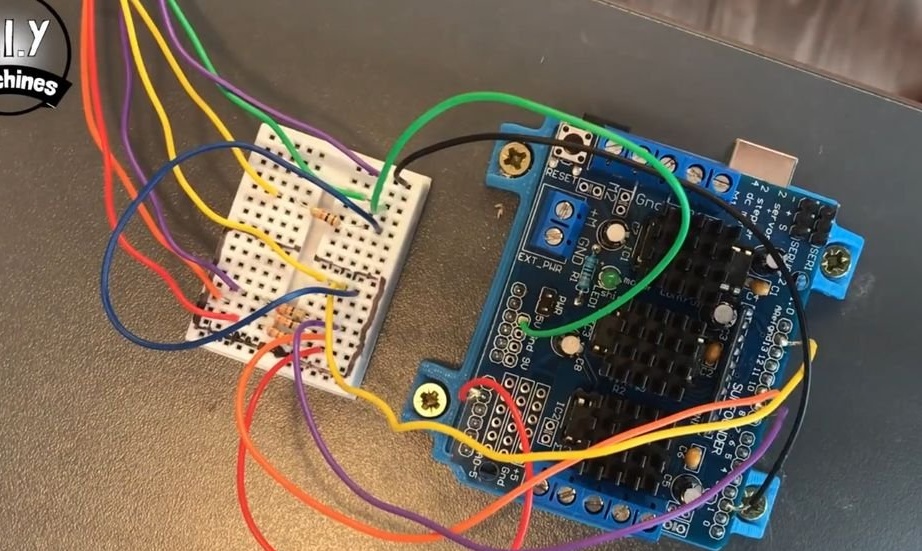
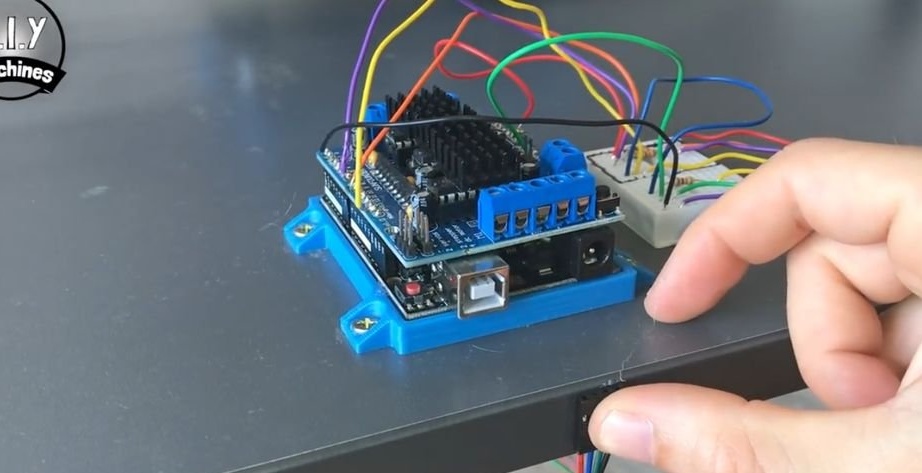
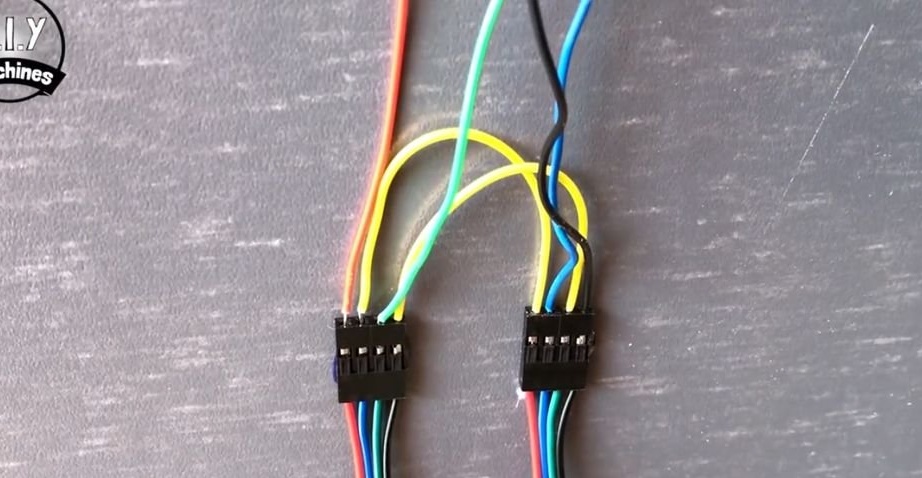
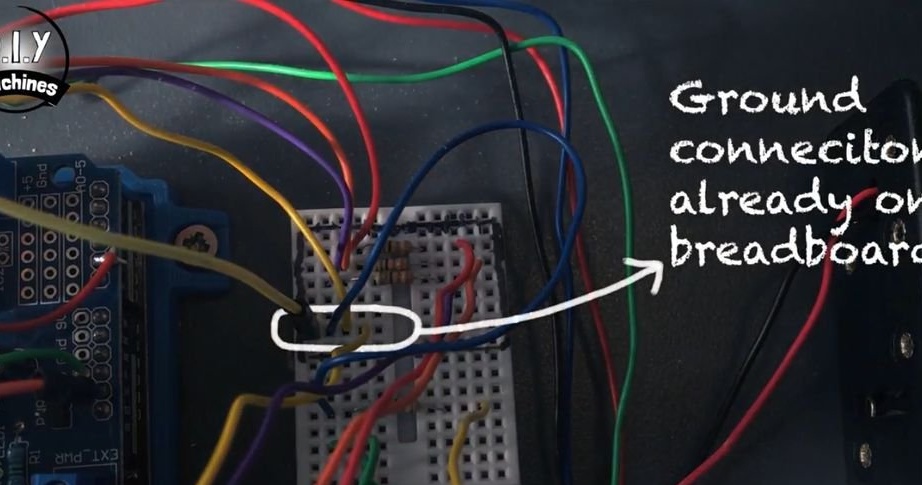
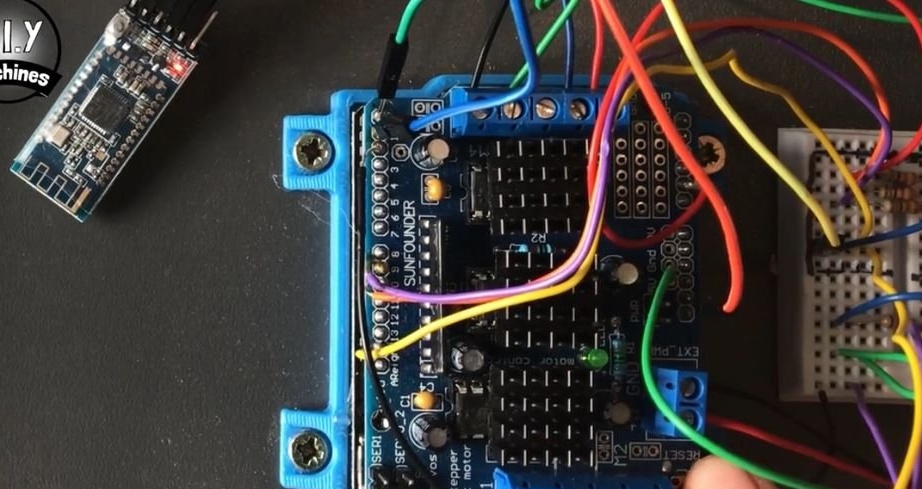
Als nächstes montiert alles auf einem Steckbrett (siehe Foto). Sichert die Platine am Tisch.
Schritt zwölf: Arduino
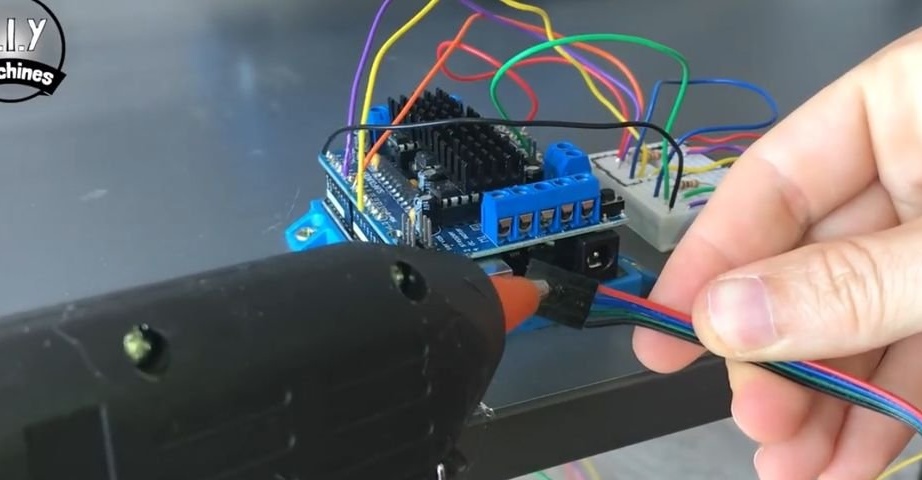
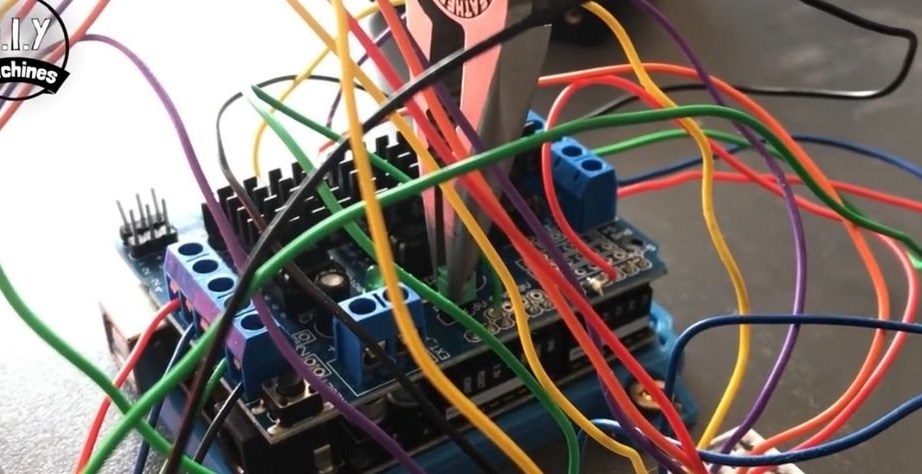
Druckt die Montageplatte für Arduino. Befestigt die Platte am Tisch. Befestigt sich auf einem Teller Arduino. Installiert ein Motortreibermodul auf dem Arduino.
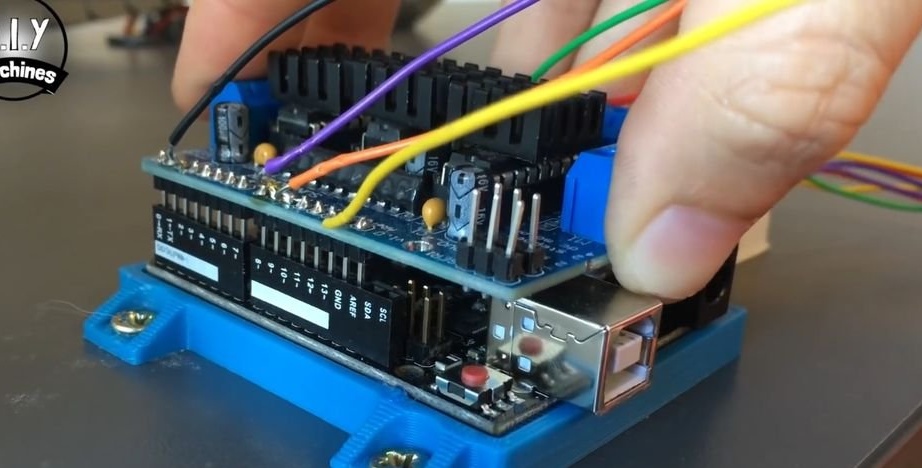
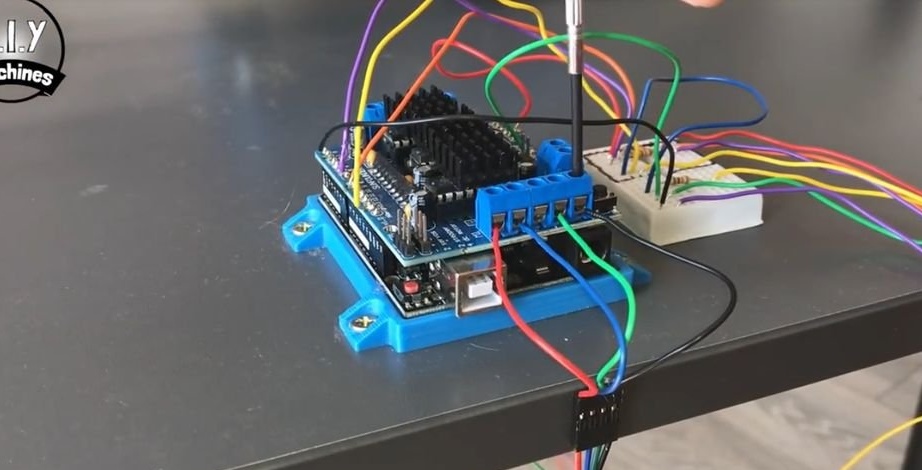
Verbindet die Kabel vom Treiber mit dem Steckbrett wie auf dem Foto.
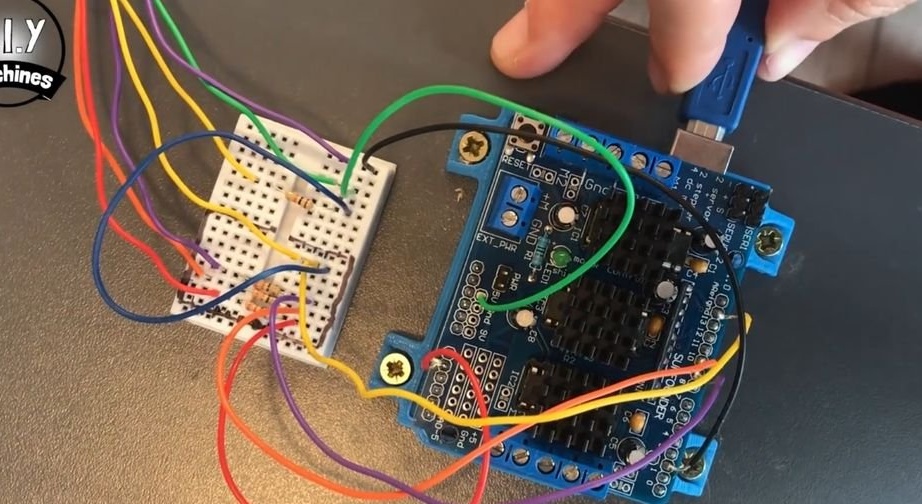
Schritt 13: Code herunterladen
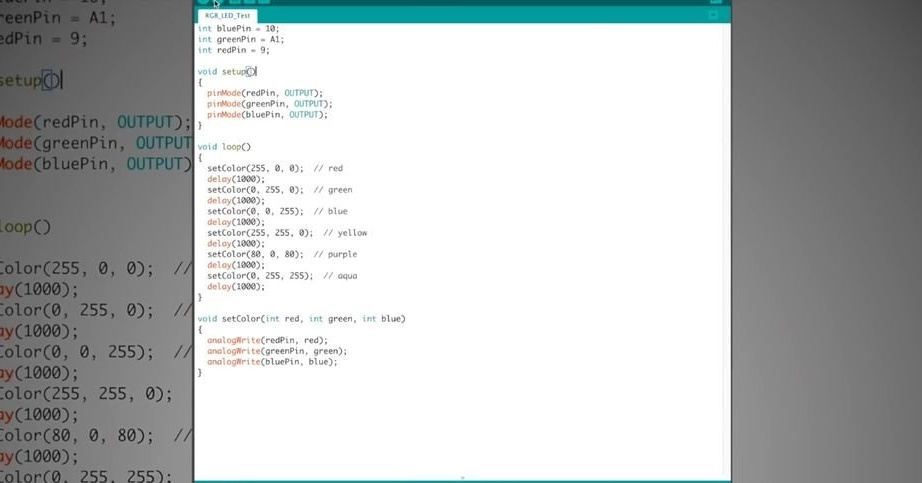
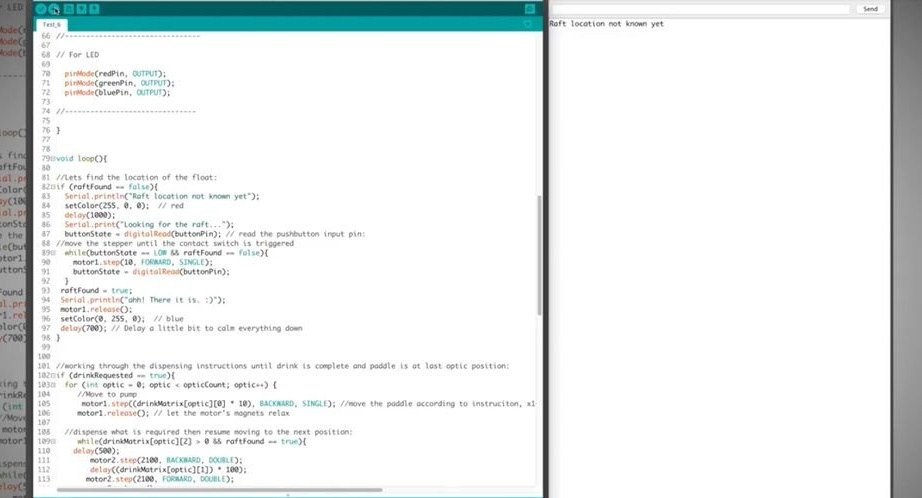
Verbindet Arduino mit einem PC und lädt den Code herunter. Code kann gefunden werden hier.
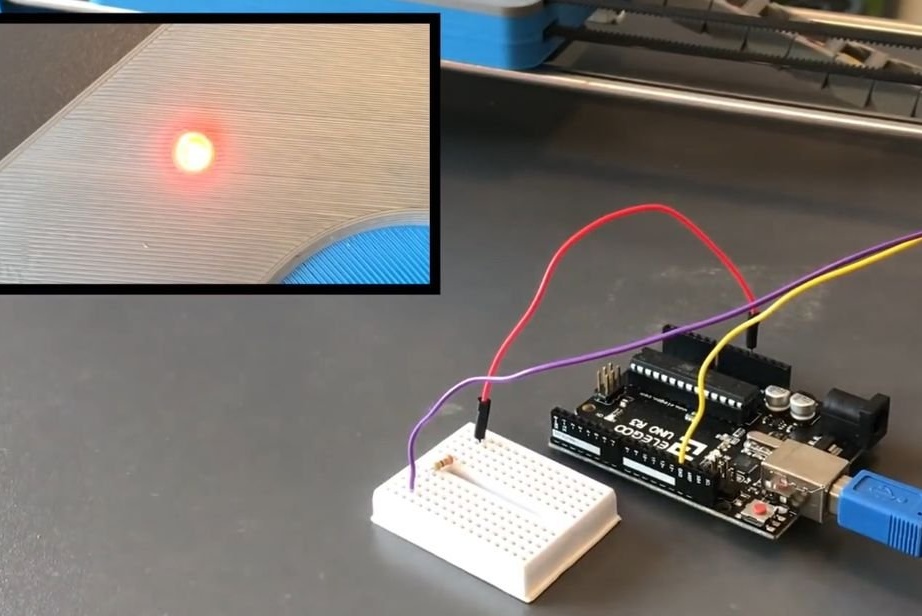
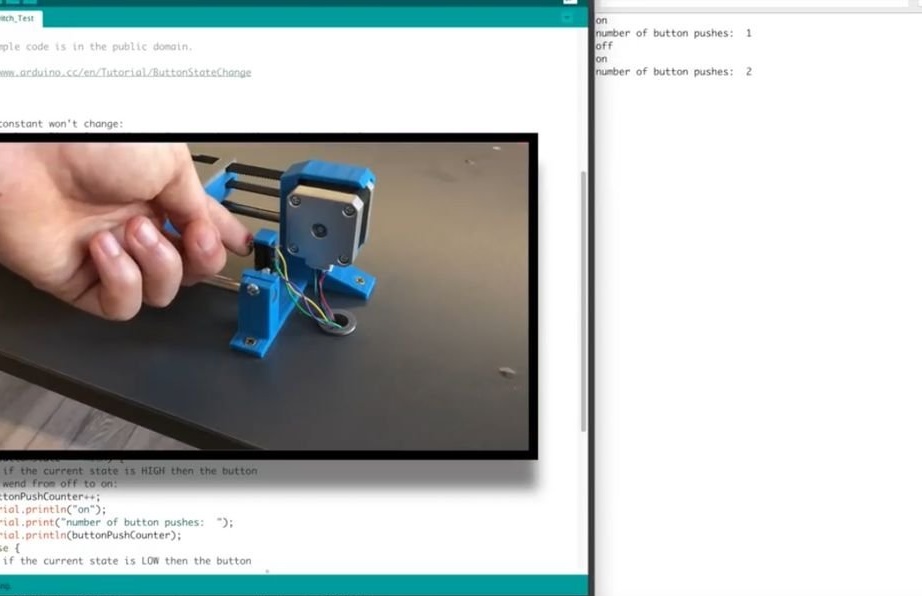
Führt den LED-Testcode aus. Die LED sollte in verschiedenen Farben leuchten.
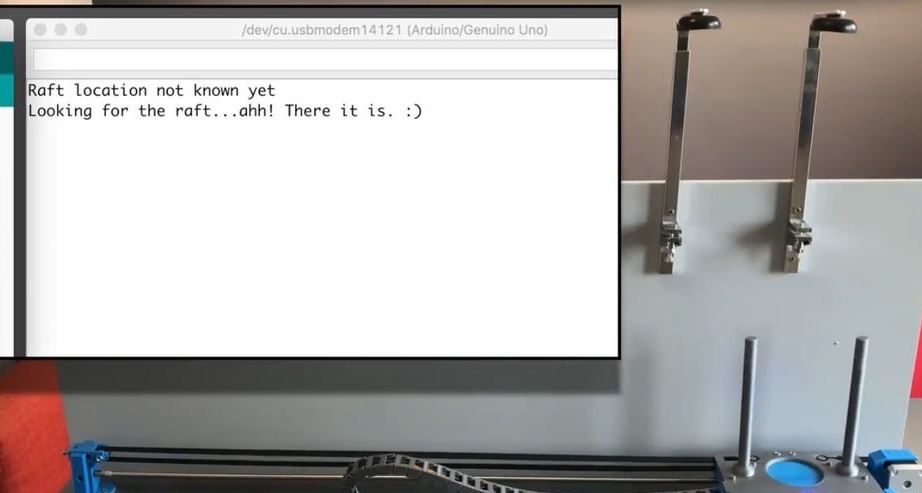
Das folgende Skript zum Herunterladen ist "Contact_switch_test". Sobald es geladen ist, sollte jedes Drücken des Endschalters auf dem Monitor angezeigt werden.

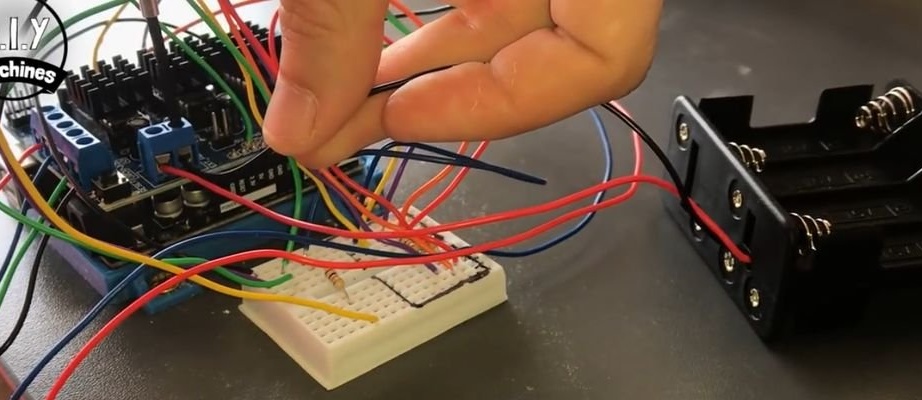
Schritt vierzehn: Anschließen der X- und Z-Motoren
Sichert den vom Motor X kommenden Stecker durch das Steckbrett auf dem Tisch. Wird mit Treiberkabeln verbunden.
Verbindet Schrittmotoren der Z-Achse.
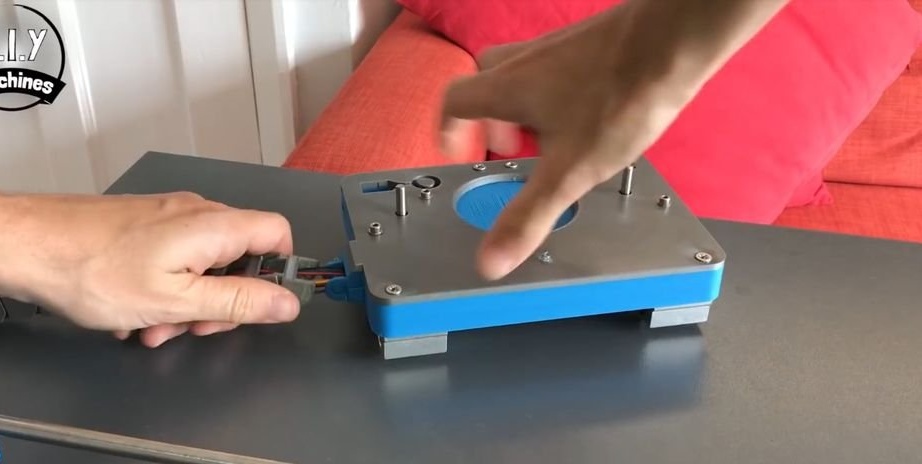
Schritt 15: Batteriefach
Entfernt einen Jumper an einem Modul. Verbindet das Batteriefach.
Jetzt können Sie "Test 1" ausführen. Die rote LED sollte aufleuchten und die Plattform sollte den Endschalter erreichen. Dann leuchtet die LED grün.
Schritt 16: Flaschenhalter
Die Verwendung von Halterungen sichert die Rückwand des MDF.




Bewegt die Plattform weiter 1 cm vom Endschalter entfernt. Richtet den Glashalter aus und sichert den Flaschenhalter mit dem Spender (leider hat der Meister keine Beschreibung für die Herstellung oder den Kauf des Halters gegeben). Weiter. Halter werden alle 12 cm angebracht.



Schritt 17: Code, Kalibrierung, Test
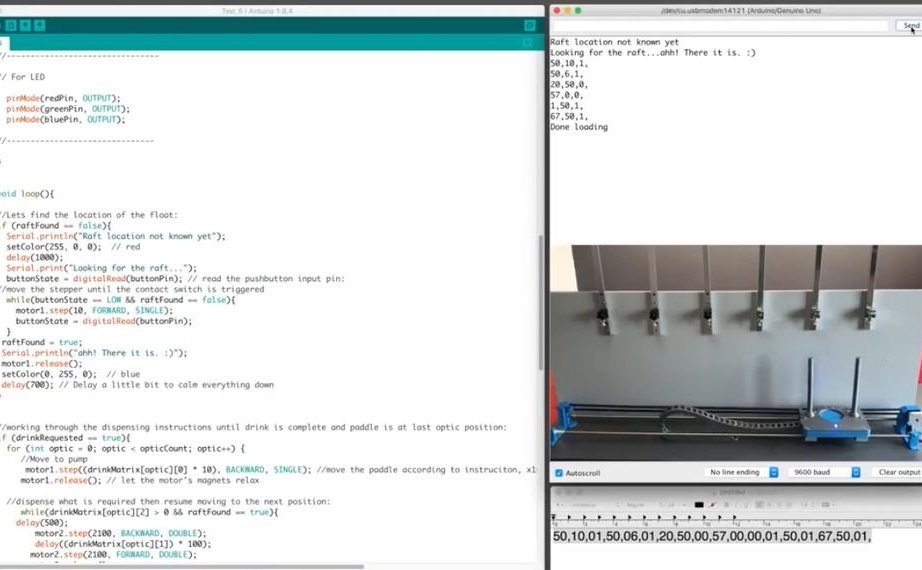
Lädt den Hauptcode unter https://www.thingiverse.com/thing:2478890
In der Einstellung werden die folgenden Werte festgelegt: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Der Meister hat sechs Spender. In den Einstellungen gibt es sechs Dreiergruppen, wobei die erste Ziffer der Abstand vom Endschalter, dem ersten Spender, dem zweiten Spender usw. ist, die zweite Ziffer die Zeit, zu der das Getränk in das Glas gegossen wurde, die dritte die Anzahl der Güsse. Alle diese Werte können nach Bedarf geändert werden.


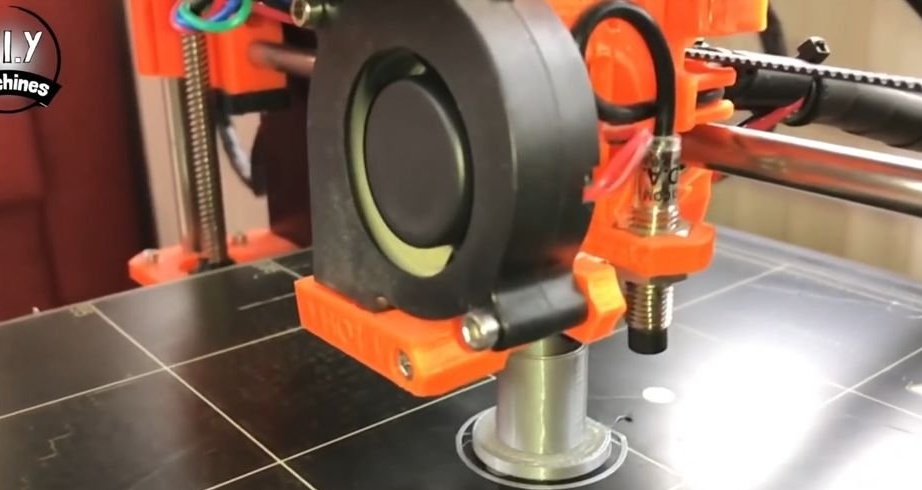
Das erste Getränk, das das Gerät zubereitete, war Gin und Cola. Um den Druck in der Flasche mit Cola auszugleichen, müssen Sie ein Loch machen. Dann stellte der Assistent die erforderlichen Parameter ein.



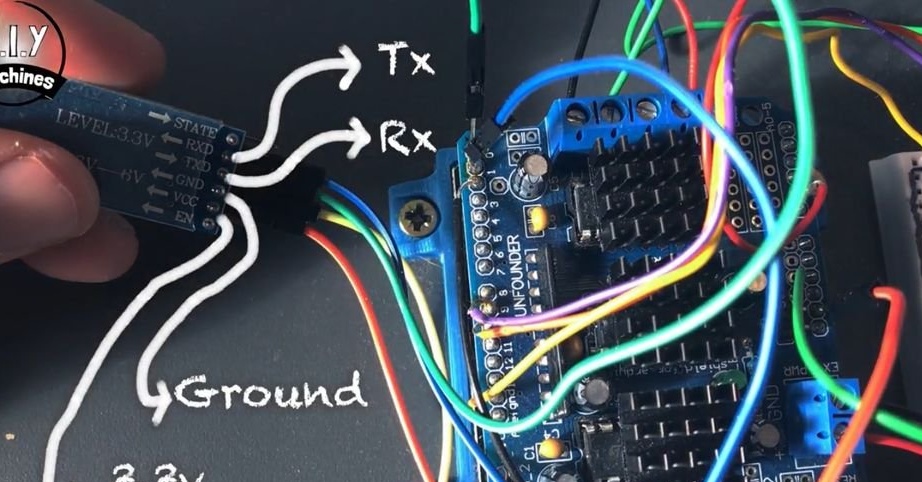
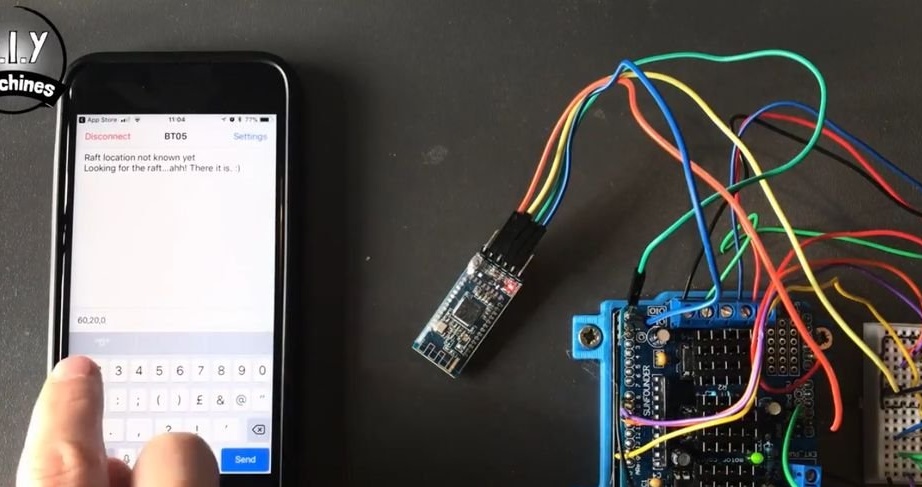
Schritt achtzehn: Bluetooth-Modul
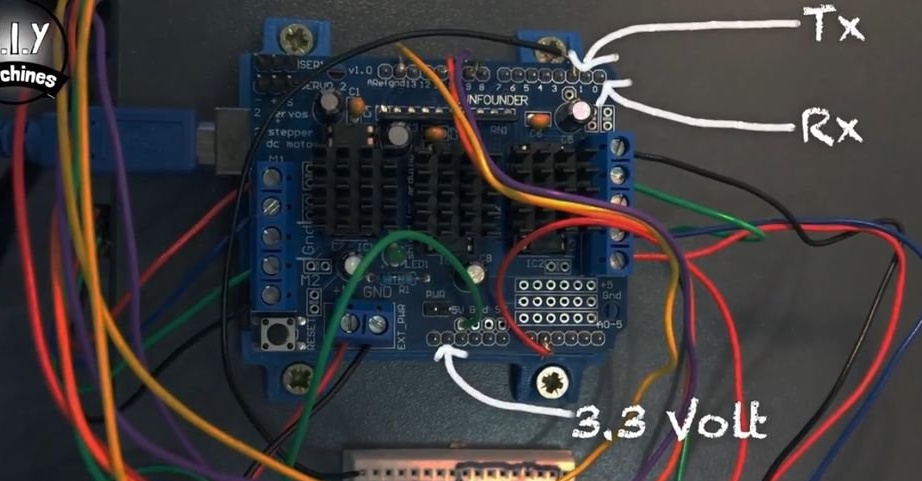
Um den Barkeeper über das Gadget zu steuern, installierte der Master ein Bluetooth-Modul. Das Modul wird wie folgt verbunden.
HM10 -> Arduino Shield
RXD ------> TX
TXD -------> RX
GND ------> Boden
VCC ------> 3,3V

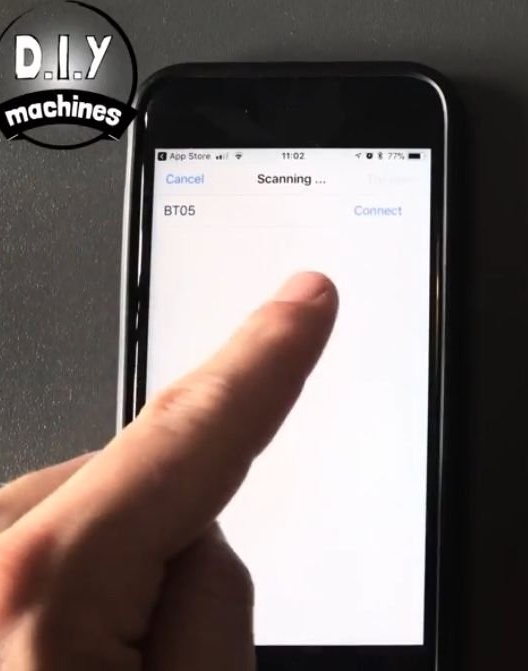
Der Master hat ein Smartphone mit iOS. Für dieses System lädt er "hm10 bluetooth serial lite" aus dem Application Store herunter. Dann stellt es Verbindungen her und gibt Einstellungen ein.

Alles ist fertig und für vollständigere Informationen ein paar Videos.