

Der Autor hat dieses Projekt auf eine einfachere Version gestützt. hausgemacht Boote und perfektionierte es. Sensoren sind im Boot platziert, um Hindernissen auszuweichen und sich ins Licht zu bewegen. Wie der Controller im Boot verwendet wird ArduinoVorne ist ein Ultraschallsensor installiert, und an den Seiten befinden sich Lichtsensoren. Dieses einfache Boot stößt nicht gegen die Wände und wird von einer Taschenlampe gesteuert.
Materialien und Werkzeuge:
- Isolierband / Klebeband
- Thermoglue mit Heißkleber
- Gleichstrommotoren 2 Stck
- Plastikflaschen 2 Stk
- Drähte
- Kleine Propeller 2 Stk
- Arduino, Computer und USB-Kabel
- Plastikbox
- 9V Batterie und Stecker
- Leistungsdioden (Typ 1N4004)
- Widerstände
- Transistor-MOSFET oder TIP 120
- Zwei Fotozellen und zwei Tasten
- Schere
- Mit einem Lötkolben löten

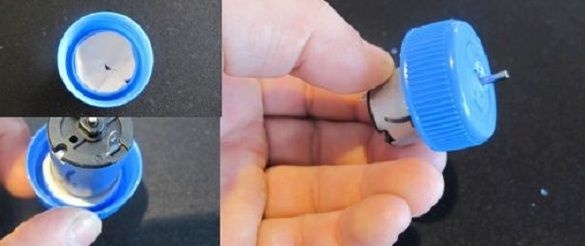
Schritt 1. Motoren einbauen.
Die Deckel werden von den Flaschen entfernt und in jede wird ein Loch gemacht. In der Abdeckung drückt der Autor Heißkleber, ohne die Löcher zu schließen. Er legte die Motorwelle in das Loch und legte sie auf den Kleber. Nachdem der Kleber getrocknet ist, dreht sich die Welle frei. Das gleiche Verfahren tritt bei der zweiten Abdeckung auf.
Schritt 2. Anbringen der Flaschen.
Die Flaschen wurden nach dem Prinzip eines Floßes mit Hilfe von drei Klebebandstreifen zusammengehalten.

Schritt 3. Löten an die Motoren.
Da die in den Steckern montierten Motoren keine Drähte hatten, mussten diese gelötet werden, die Länge der Drähte betrug ca. 25-30 cm.

Schritt 4. Der Schnitt in die Flaschen.
Damit die Drähte in den Rumpf des Bootes fallen, wird von ihrer Oberseite ein kleiner Schlitz gemacht.

Schritt 5. Motoren sichern.
Außerdem dreht der Autor die Deckel der Flaschen, da sie sich nicht gut drehen ließen. Ich musste Heißkleber verwenden. Drähte werden durch die vorbereiteten Löcher in den Flaschen geschoben.

Schritt 6. Fall.
Eine Plastikbox klebt an zwei Flaschen. In dieser Kapazität für Elektronik können Sie Löcher für die Drähte bohren oder die Drähte durch die Rückseite der Box halten. Die Löcher für die Drähte an den Flaschen sind mit Schmelzkleber isoliert.

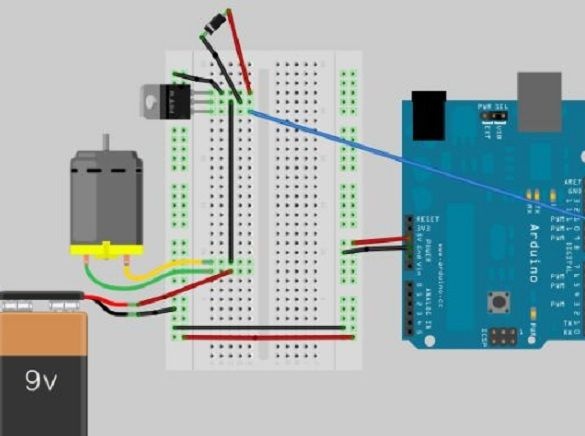
Schritt 7. Schaltplan.
Die Schaltung verwendet einen TIP 120-Transistor als Schalter (Sie können ähnliche MOSFET- oder Darlington-Transistoren verwenden). Es wird verwendet, um die Last zu schalten, wenn viel Strom verbraucht wird, da der Arduino nicht genügend Leistung für die Motoren hat. Diese Schaltung wird für den ersten und dann für den zweiten Motor zusammengebaut (eine weitere Batterie wird für den zweiten Motor nicht benötigt).
Schritt 8. Sensoren.
Der Ultraschallsensor eignet sich hervorragend für die Vorderseite des Bootes und warnt vor Hindernissen auf dem Weg. Fotozellen wirken wie Antennen und werden verwendet, um das Boot ins Licht schweben zu lassen.Die Tasten an den Seiten dienen als Hindernissensoren. Sie können den Code auch ändern und andere Sensoren wie Infrarot verwenden.

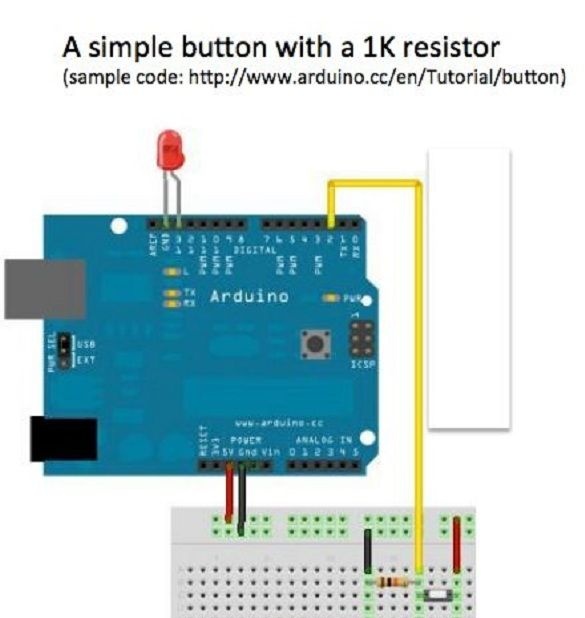
Schritt 9. Schemata für Sensoren.
Das Diagramm zeigt den Anschluss einer einfachen Taste und eines 1K-Widerstands. Das Schema für beide Tasten wird wiederholt, die Tasten befinden sich auf beiden Seiten des Bootes. Sie sind dafür verantwortlich, die Bewegung des Bootes bei einer Kollision zu ändern.
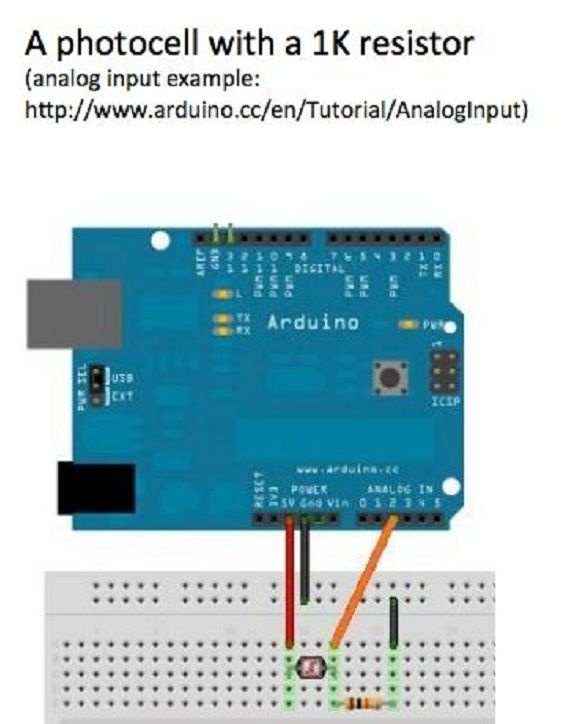
Die folgende Abbildung zeigt eine Schaltung mit einem 1K-Widerstand und einer Fotozelle. Der Autor führte es zweimal durch und platzierte die Fotozellen auf gegenüberliegenden Seiten des Bootes.
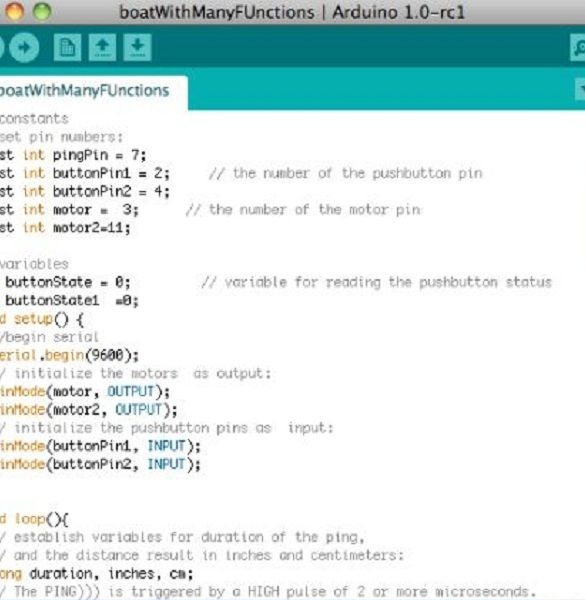
Schritt 10. Programmcode.
Der Autor bot die Möglichkeit, seinen Code zur Verwendung herunterzuladen und damit grundlegende Funktionen für diejenigen bereitzustellen, die ein solches Boot zusammenbauen werden. Der Code unterstützt Fotozellen, Entfernungsmesser und Tasten. Das Boot versucht, Hindernissen vor sich selbst auszuweichen, und dreht sich in die entgegengesetzte Richtung, wenn es auf Hindernisse von der Seite stößt. Wenn Sie nicht den gesamten Satz von Sensoren verwenden möchten, sondern nur einige von ihnen einen eigenen Code haben. Sie können alle Codes unter dem Artikel herunterladen.
Schritt 11. Das Boot zusammenbauen.
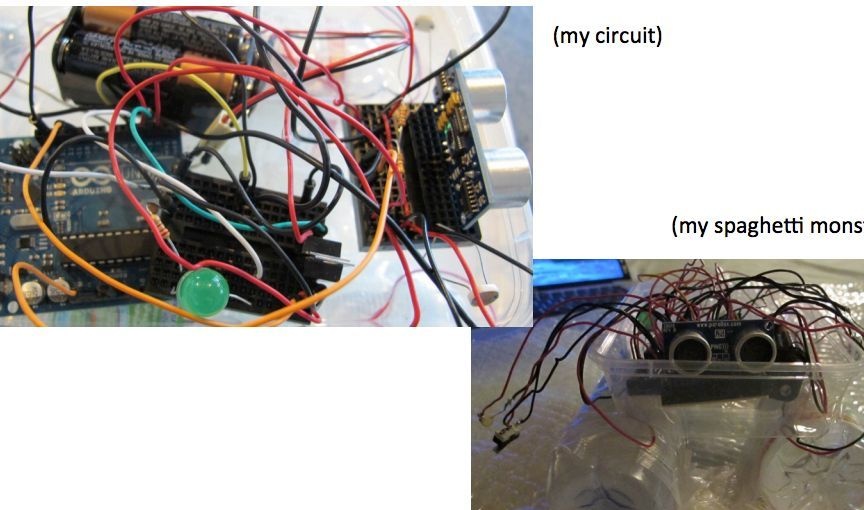
Zusammengebaute Schaltung, Arduino und Batterien sind verpackt.
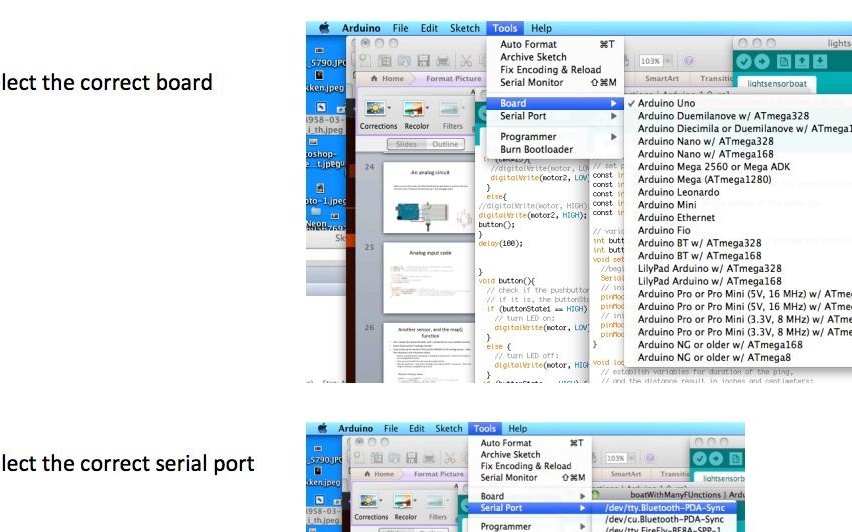
Schritt 12. Laden Sie die Skizze herunter.
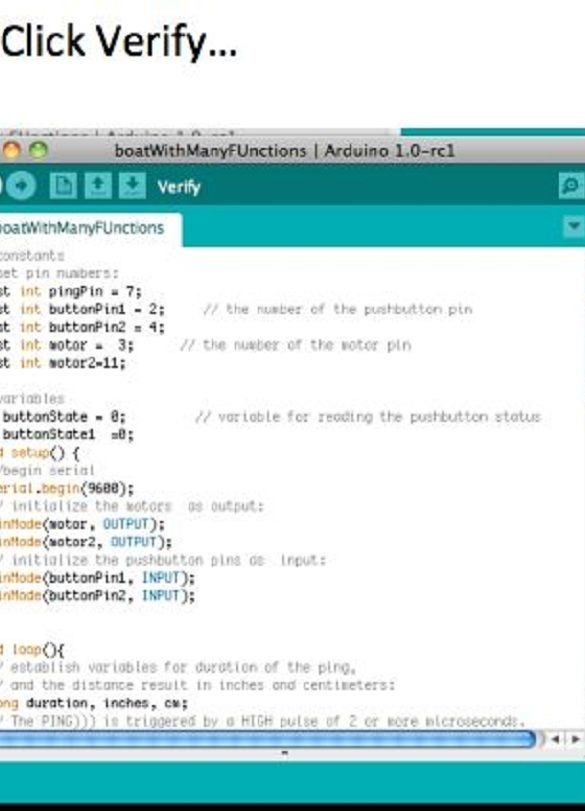
Als nächstes wird die Arduino IDE geöffnet und die richtige Datei und der richtige Port ausgewählt. Anschließend hat der Autor den Code kompiliert und auf den Controller hochgeladen.
Schritt 13. Wasserbeständig und testen.
Der Autor isolierte zusätzlich alle potenziellen Wassereintrittsstellen mit Heißkleber. Isolierte auch alle Drähte gegen Kurzschluss. Der Behälter mit Arduino wird mit derselben Schachtel abgedeckt und mit Klebeband versiegelt. Propeller sind an den Motoren angebracht. Hier ist das Boot fertig, jetzt können Sie mit dem Testen auf dem Wasser beginnen.



Video mit einem vorläufigen Test des Bootes: