

Dieses Projekt ist ideal für diejenigen, die oft vergessen, ihren Fisch zu füttern. Oder einfach nicht immer pünktlich. Nachdem Sie einen solchen Futterautomaten hergestellt haben, können Sie sich keine Sorgen mehr um Ihre kleinen Haustiere machen und können sogar eine Weile gehen.
Material:
- Arduino UNO oder ein anderer kompatibler Mikrocomputer.
- Netzteil 9V oder 12V.
- Ein 5-V-Schrittmotor von einem alten Diskettenlaufwerk.
- Glatte Partition (wird aus dem Werkzeugkasten verwendet).
- Hebelschalter von einem Festnetztelefon.
- Das Gehäuse von der Festplatte (dient als Zufuhrbehälter).
- Glatte Platte (z. B. Kunststofflineal).
- Stativ von einer CCTV-Kamera.
- Widerstand 10 kOhm.
- Mechanischer AC-Timer.
Erster Schritt. Fallmontage:
Das Baugruppendesign ist in der ersten Abbildung dargestellt. Auf einer Seite des Festplattengehäuses ist ein Loch ausgeschnitten. Für diesen Teil des Feeders können Sie sogar eine Plastikflasche verwenden. Sie müssen jedoch eine Stütze dafür bereitstellen, damit sie verkehrt herum gehalten wird.
Der Autor verwendet ein Stativ einer CCTV-Kamera, da es eine ideale Höhe für die Installation eines Schrittmotors darunter hat. Es blieb nur noch ein Loch in das Gehäuse zu bohren.
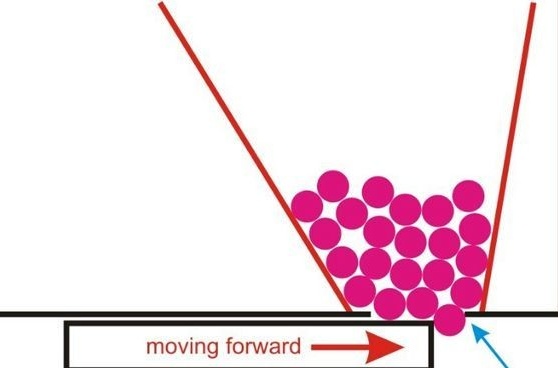
Ein 5-V-Schrittmotor mit einem Antriebsmechanismus zum Bewegen der Antriebslinsen wurde zum Bewegen der Abdeckung verwendet. Eine glatte Trennwand aus der Schachtel wurde oben auf dem Linsenhalter unterhalb des Lochs platziert, in dem die Zufuhrpellets austreten sollten. Hierzu wird auch empfohlen, ein gebrochenes Lineal zu verwenden. Lassen Sie einen Millimeter vom Rumpfboden entfernt, damit die Futterpellets durch den geschlossenen Deckel gelangen können.


Schritt zwei Veränderung des Körpers:
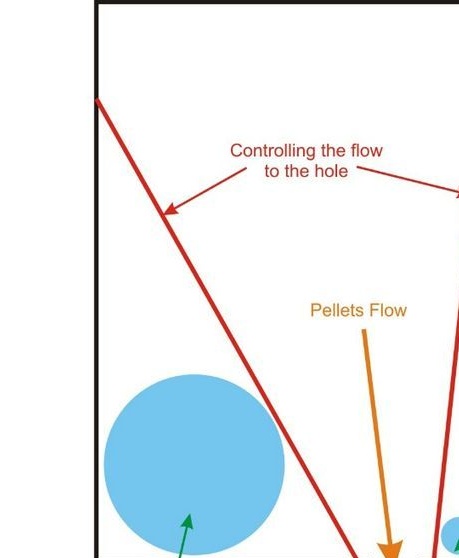
Das folgende Diagramm zeigt, wie das Futter korrekt durch das Loch laufen soll, damit die Pellets nicht in den Futteraustrittswinkeln verweilen.
Nach zwei Tagen stellte der Autor fest, dass ein Teil des Feeds feststeckte, aber nicht wie beabsichtigt herauskam. Deshalb brauchten wir ein Lineal oder eine glatte Platte, die in den Behälter und in Form des Buchstabens V passt.

Schritt drei Elektronisch Teil des Feeders:
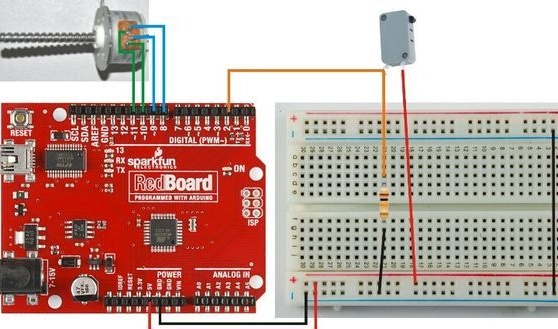
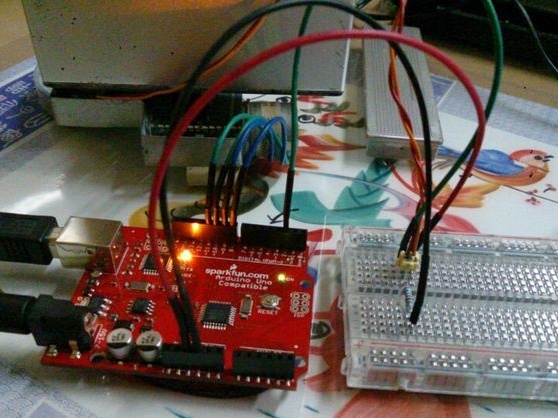
Ein Schrittmotor, ein 10-kΩ-Widerstand und ein Schalter sind wie in der folgenden Abbildung gezeigt installiert. Um das Verständnis der Funktionsweise der Schaltung und des Testens zu erleichtern, wird ein Steckbrett verwendet, das in der Endmontage fehlt (ein Beispiel auf dem letzten Foto).
Vier Motorkabel werden an die digitalen Pins 8-11 angeschlossen. Ein Fuß des Schalters zur 5V-Ausgangsleistung. Der zweite Zweig ist wiederum über einen 10-kΩ-Widerstand mit Masse verbunden und auch mit dem digitalen Pin 2 verbunden.
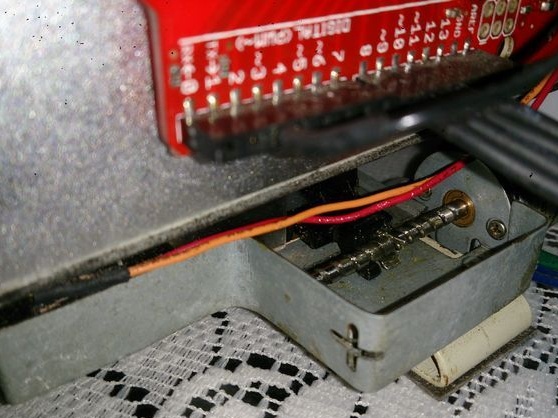
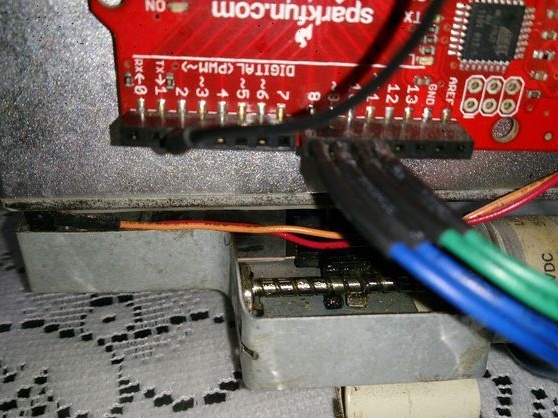
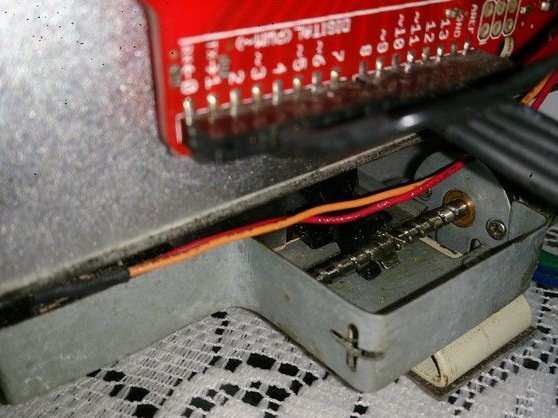
Der Schalter befindet sich vor der beweglichen Abdeckung, und das Metallteil wird gebogen, wodurch ein Stopper gebildet wird (roter und orangefarbener Draht auf dem dritten Foto). Wenn der Schalter vorwärts bewegt wird und den Stopp drückt, registriert der Arduino einen HIGH-Wert und stoppt den Motor.
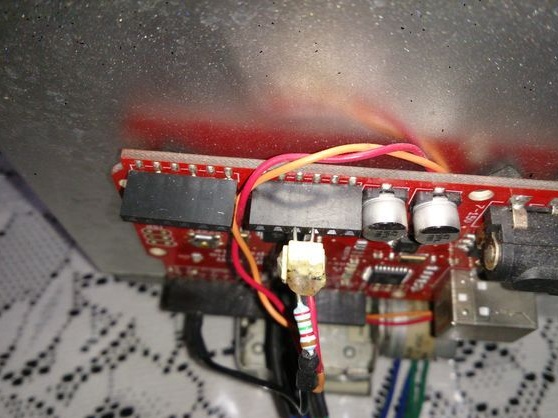
Die Platine wird mit Klebeband an der Rückseite des Gehäuses befestigt und der Stecker mit einem Timer an der Seite. Sie werden verwendet, um den Körper so auszugleichen, dass er in der richtigen Position bleibt.
Arbeitstest hausgemacht ohne Lebensmittelbehälter:
Das folgende Video zeigt den Betrieb eines fertig montierten Geräts. Wie Sie sehen können, ist die erste Vorschubausgabe korrekt. Am zweiten Ausgang des Futters ist zu erkennen, dass sich das Granulat, wenn es festsitzt und der Deckel nicht richtig schließt, vorwärts und rückwärts bewegt, bis es richtig schließt.
Programmcode: