

Mache ein paar tanzende Roboter mit Magneten!
Anstatt nur mit den Magneten zu spielen, die ich bei Ebay gekauft habe, habe ich mir etwas wirklich Cooles ausgedacht. Wenn Sie eine kleine Unterlegscheibe auf eine ebene Fläche stellen und den Magneten in einem Kreis unter der Unterlegscheibe bewegen, ändert sich die Drehrichtung dramatisch.
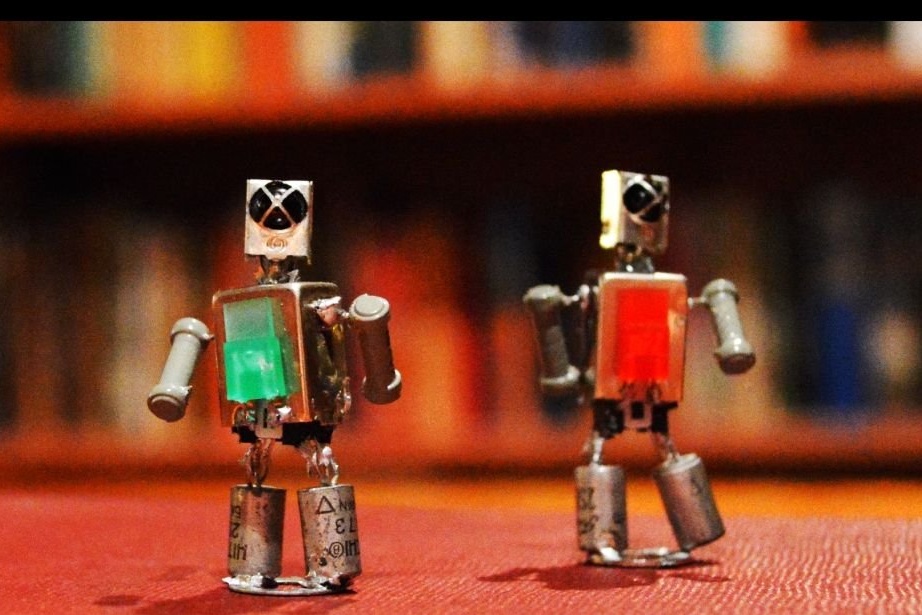
Sobald ich das sah, musste ich einfach eine neue Erfindung erfinden. Infolgedessen diese Roboter- Tänzer - Die Idee ist nicht ganz einfach umzusetzen, aber das Endergebnis ist einfach wunderbar! Roboter sehen wirklich aus wie tanzende kleine Männer, und was gut ist, ist, dass der Mechanismus, der sie in Bewegung setzt, überhaupt nicht sichtbar ist.
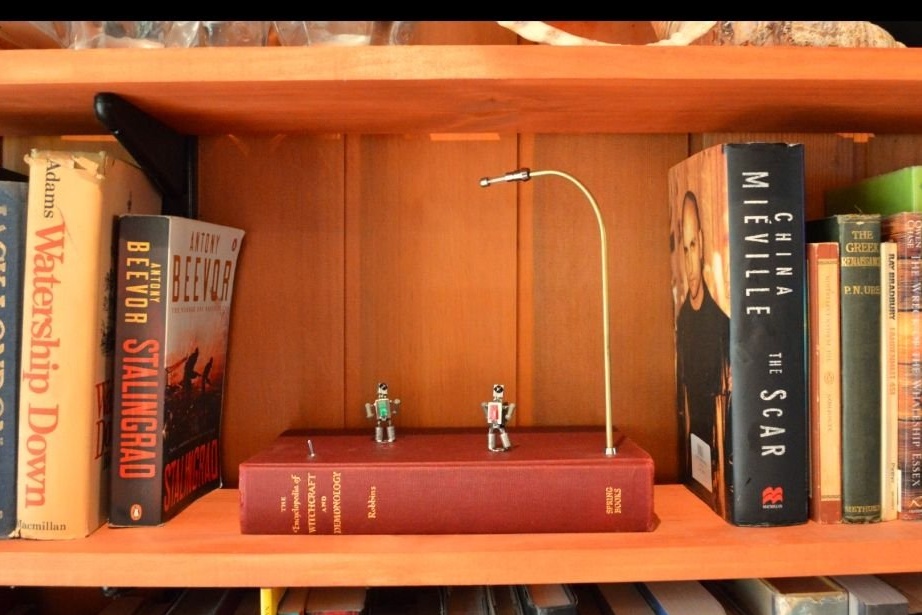
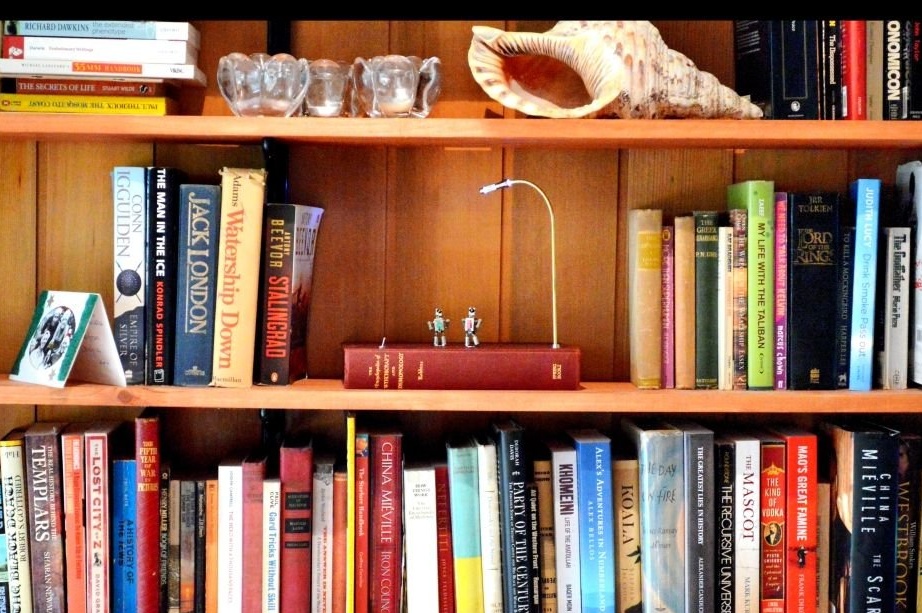
Ich habe das Buch als Tanzfläche für Roboter gewählt, weil ich das Buch als Ständer haben wollte. Sie können eine Holzkiste oder eine Pappschachtel nehmen, in der der Motor versteckt ist. Aber für mich schien das Buch die beste Option zu sein.
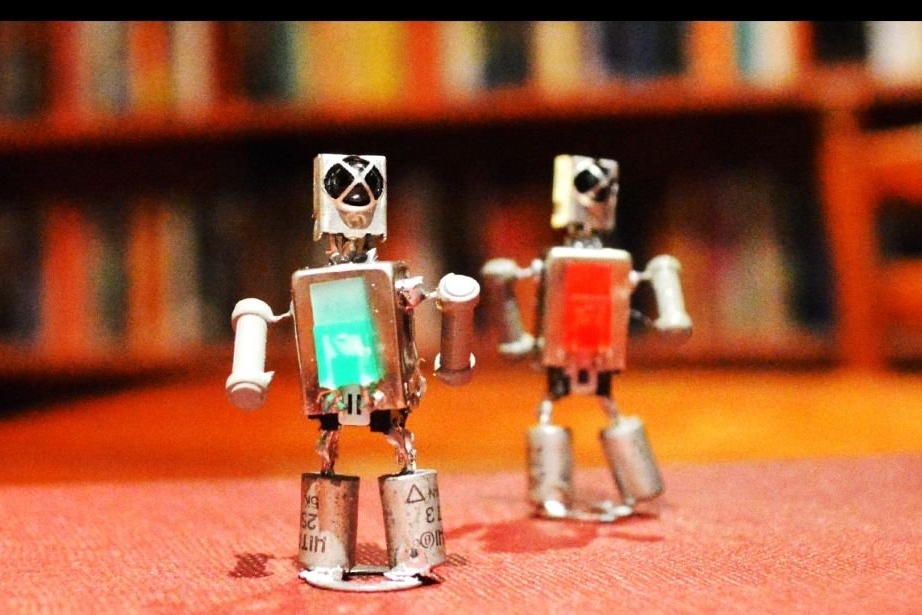
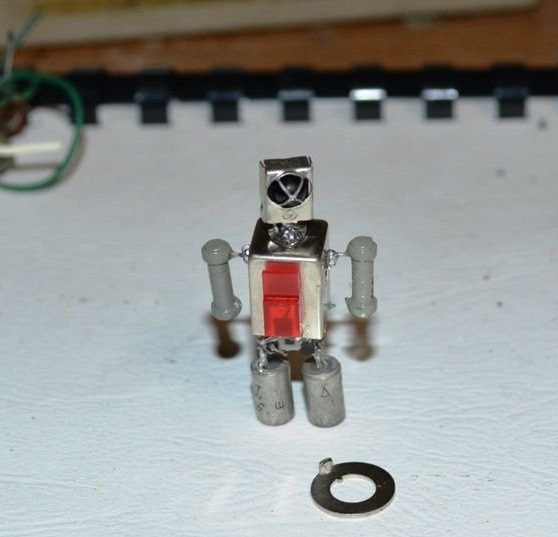
So sehen Roboter „in Aktion“ aus:
Und so werden sie hergestellt ...
Schritt 1: Teile zusammenbauen



Material
- Hardcover-Buch
- Getriebemotor 3V, 15 U / min
- weißer LED-Schalter
- 2 LED-Halter
- alte Sicherung
- Kupferrohr - Kupferdraht (dünn)
- Draht
- 2 Magnete
- Batteriehalter
- Hebelschalter
- alte elektrische Teile: Widerstände, Transistoren, Potentiometer - alles was ist. Aus all dem löten wir unsere Roboter.
- 2 Unterlegscheiben, so dünn und glänzend wie möglich.
Werkzeuge:
- Heißkleber
- Lötkolben und Lötmittel
- Zangen
- Baumesser
Schritt 2: Herstellung der Roboterbeine
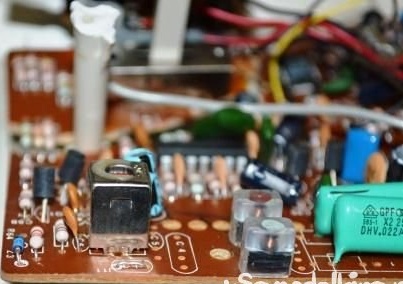






Aus welchen Teilen der Roboter bestehen sollte, liegt bei Ihnen. Schauen Sie sich an, was sich in dem Haus befindet, von dem aus es gelötet werden könnte - alte elektrische Komponenten, Ersatzteile aus dem Radio, alles, was nicht benötigt wird, kann in diesem Projekt verwendet werden.
Stellen Sie zunächst alle Ersatzteile zusammen, die Ihrer Meinung nach für die Montage des Roboters geeignet sind. Experimentieren Sie mit diesen Details, um die besten auszuwählen.
Ich hatte einen alten Verstärker, den ich im Müll eines der Nachbarn gefunden hatte, und er hatte alles, was für Roboter benötigt wurde.
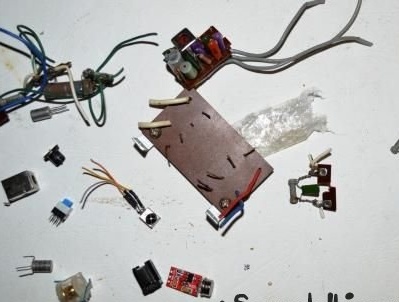
Schritte:
1. Teile an einem Ort zusammenbauen
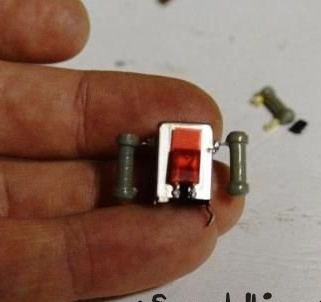
2. Für die Beine habe ich ein Paar Transistoren verwendet, die ich an den Schalter gelötet habe, wie auf dem Foto oben gezeigt.
3. Danach habe ich die Transistoren etwas herausgebogen, um eine Form zu erhalten, die eher den Beinen ähnelt.
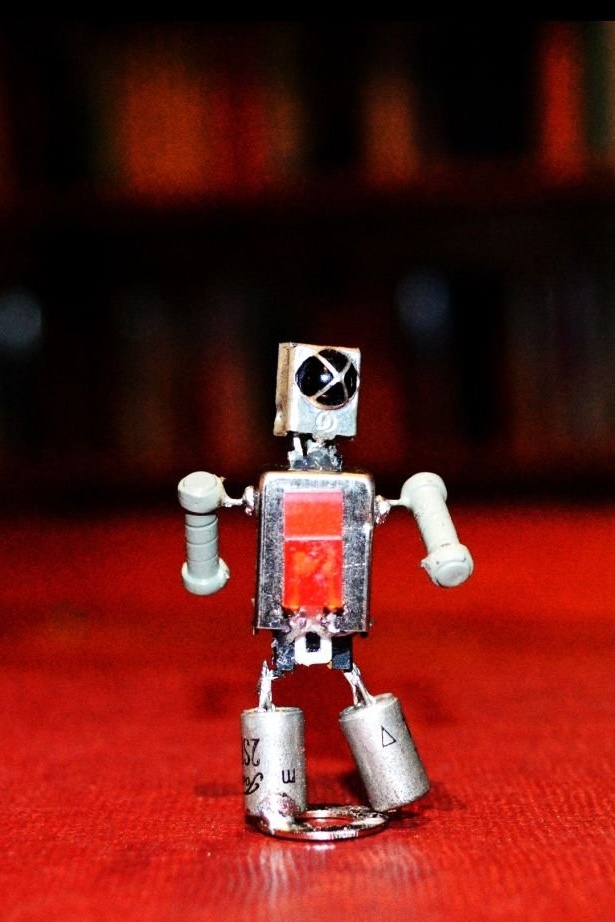
Schritt 3: Anbringen der Arme und des Rumpfes




Schritte:
1. Als Körper nahm ich das alte Potentiometer. Ich nahm das Innere heraus und benutzte den Körper als Körper.
2.Ich habe ein paar Widerstände als Hände am „Körper“ angebracht. Ich musste daran basteln, meine Hände an den Körper zu löten, aber ich habe mich trotzdem durchgesetzt. Erhitzen Sie das Gehäuse zum besseren Löten mit einem Lötkolben und fügen Sie eine Lötkugel hinzu, bevor Sie versuchen, einen Widerstand anzubringen. Das sollte helfen.
3. Ich habe die alte Diode vorne gelötet, weil ich Roboter im Retro-Stil wollte. Ich habe gerade die Diodenkontakte an das Gehäuse gelötet und den Überschuss abgeschnitten.
Schritt 4: Fügen Sie den Rest der Details hinzu.



Schritte:
1. Dann habe ich die Roboterköpfe gemacht. Ich habe lange überlegt, was ich als Kopf nehmen soll, und am Ende habe ich mich für den alten Fototransistor entschieden (es scheint, dass es das ist!).
2. Ich habe die Verkabelung abgeschnitten und den Fototransistor mit Heißkleber am Gehäuse befestigt.
3. Dann habe ich meine Beine und meinen Körper auf die gleiche Weise abgeklebt.
4. Und schließlich habe ich eine kleine Unterlegscheibe an meine Füße gelötet. Dies ist der wichtigste Teil, da es der Puck ist, der unsere Robotertänzer machen wird!
Hinweis: Die Unterlegscheiben, die ich verwendet habe, waren sehr dünn und gut poliert. Dies ist sehr wichtig. Verwenden Sie so dünne wie möglich Unterlegscheiben. Die dickeren Unterlegscheiben, die ich auch getestet habe, zeigten den schlechtesten Effekt und funktionierten nicht so, wie sie sollten.
5. Ich habe meine Beine verlötet, um dem Roboter die Wirkung eines sich bewegenden Mannes zu verleihen. Sie sehen diese Änderungen auf den Fotos aus diesem Schritt.
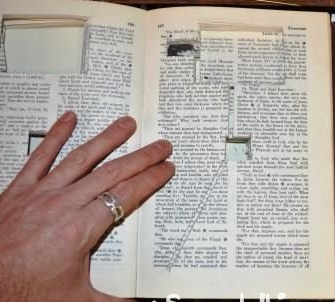
Schritt 5: Das Buch vorbereiten - den ersten Schnitt machen



Der nächste Schritt besteht darin, das richtige Buch zum Einbetten von Batterie, Motor und Magneten zu finden. Hier ist der wichtigste Punkt die Dicke des Buches. Es sollte ausreichen, alle diese Teile nach innen zu montieren. Ich habe viele Bücher, daher war es nicht schwierig, das richtige zu finden (am schwierigsten ist es, für alle Ersatzteile Rohlinge aus dem Buch herauszuschneiden!)
Schritte:
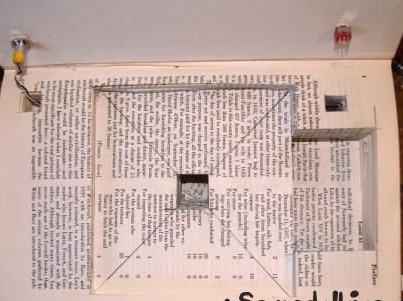
1. Zeichnen Sie zuerst ein Quadrat in die Mitte des Buches. Hier werden wir später den Motor und die Magnete platzieren.
2. Schneiden Sie die Seiten in Teile und hören Sie auf, wenn Sie eine Tiefe von ca. 10 mm erreichen.
3. Messen Sie in der Mitte des geschnittenen Quadrats ein weiteres Quadrat von 15 x 15 mm. Verwenden Sie ein Baumesser und schneiden Sie dieses kleinere Quadrat bis zur hinteren Abdeckung.
Schritt 6: Wir stopfen das Buch - wir binden die Batterie ein





Schritte:
1. Markieren Sie den Ort für die Batterien.
2. Schneiden Sie die Kerbe in den Seiten so ab, dass die Batterien vollständig hineinpassen.
3. Schneiden Sie einen kleinen „Kanal“ in das Buch, um ihn an den Motor anzuschließen, wie auf dem Foto oben gezeigt. In diesem Kanal befinden sich Kabel von der Batterie zum Motor.
4. Es ist an der Zeit, die Batterie anzuschließen. Sie benötigen 3 Drähte. Ich habe ein Computerkabel verwendet und 3 Drähte zusammengebunden, wie auf dem Foto gezeigt. Eine Verkabelung angeschlossen an
- wechseln
- zum Motor
- Diode
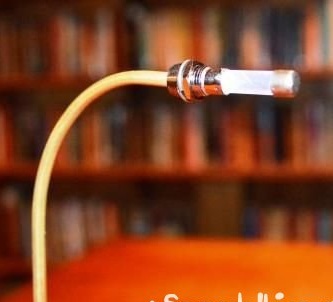
Schritt 7: Wir füllen das Buch - Fügen Sie das Licht und den Schalter hinzu







Jetzt müssen Sie den Ein / Aus-Schalter und das Licht hinzufügen. In der Tat ist die Beleuchtung eine optionale Komponente, daher liegt es an Ihnen, zu entscheiden, ob Sie dies tun oder nicht.
Schritte:
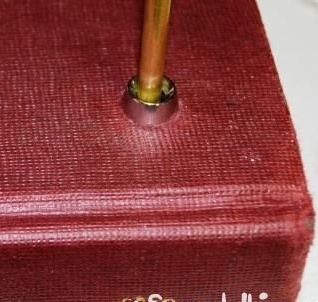
1. Biegen Sie das Kupferrohr wie gezeigt.
2. Ziehen Sie einen Draht hindurch und stellen Sie sicher, dass an beiden Enden Draht vorhanden ist.
3. Am flachen Ende der Röhre habe ich den Halter für die Diode befestigt. Dies ist erforderlich, um das Rohr am Buch zu befestigen.
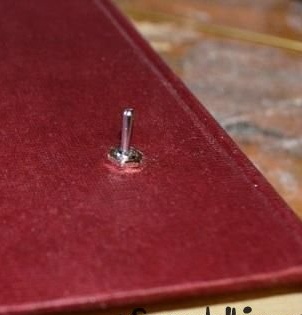
4. Am anderen Ende habe ich auch den Halter für die Diode befestigt, aber umgekehrt. Ich habe auch eine Sicherung an der Spitze des Halters angebracht, nachdem ich zuvor eine Metallspitze abgeschnitten hatte. Ich habe einfach das Glassicherungsrohr in den Diodenhalter eingesetzt.
5. Dann müssen Sie die Diode an das Ende der Kupferröhre anschließen und alles mit einem Diodenhalter mit einer Sicherung am Ende verschließen.
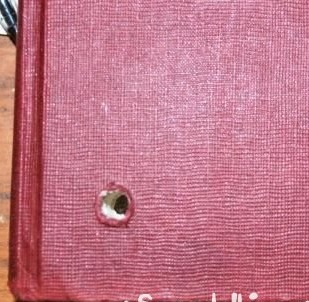
6. Als nächstes müssen Sie 2 Löcher in das Buch bohren. Einer ist für den Schalter und der zweite für die Lampe. Beide Löcher sollten nahe beieinander liegen.
7. Erstellen Sie erneut zwei Kanäle im Buch für Drähte, wie auf dem Foto gezeigt.
Schritt 8: Wir stopfen das Buch - wir binden den Motor ein





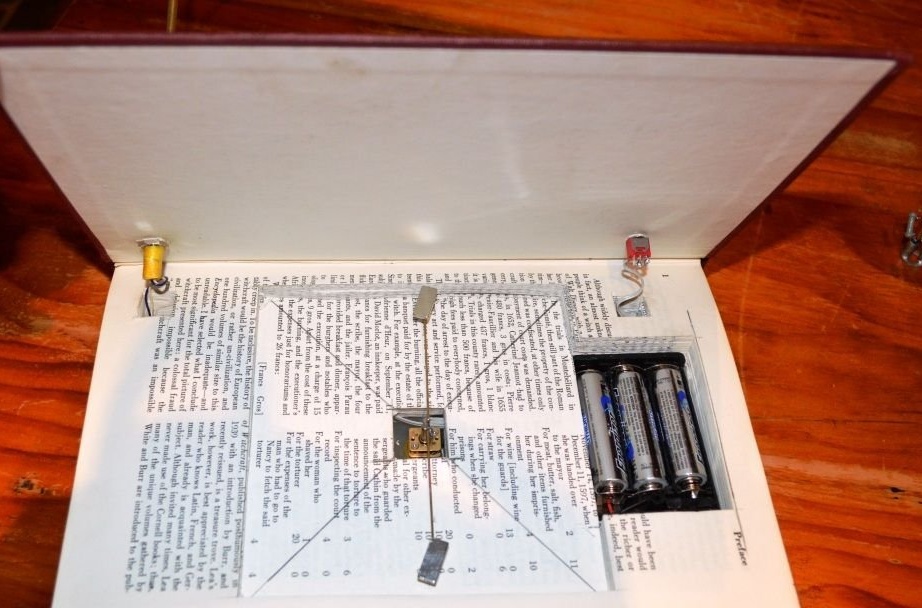
Schritte:
1. Während ich mit dem Motor beschäftigt war, habe ich beschlossen, eine Klemme hinzuzufügen, um ihn idealerweise in das Buch zu integrieren.
2. Ich habe auch die Seiten aufgenommen, auf denen ich die Kanäle für die Drähte verlegt habe. Das Buch ist auf und ab geschnitten, so dass es nicht überflüssig ist, die Struktur durch Kleben der geschnittenen Seiten aus PVA oder Bürokleber zu verstärken.
3. Platzieren Sie den Motor in der Mitte der Kerbe in der Mitte des Buches und sichern Sie ihn mit Heißkleber. Der Motor sollte fest im Buch sitzen. Wenn nicht, wickeln Sie den Motor mit Klebeband um.
3. Verbinden Sie die Kabel mit dem Schalter und der Diodenlampe.
4. Sie müssen dem Motor auch einen Hebel hinzufügen.An beiden Enden des Hebels befinden sich Magnete. Dadurch wird der Roboter in Bewegung gesetzt. Biegen Sie zuerst den Hebel wie auf dem Foto gezeigt. Stellen Sie dann den Hebel so nach innen, dass er sich innerhalb des größeren geschlitzten Quadrats dreht.
5. Kleben Sie die Magnete mit Heißkleber an die Enden des Hebels. Ich stelle die Magnete in einem leichten Winkel ein, damit meine Roboter tanzen können.
6. Löten Sie den Hebel wie oben gezeigt an den Motor.
Schritt 9: Die Arbeit ist erledigt!
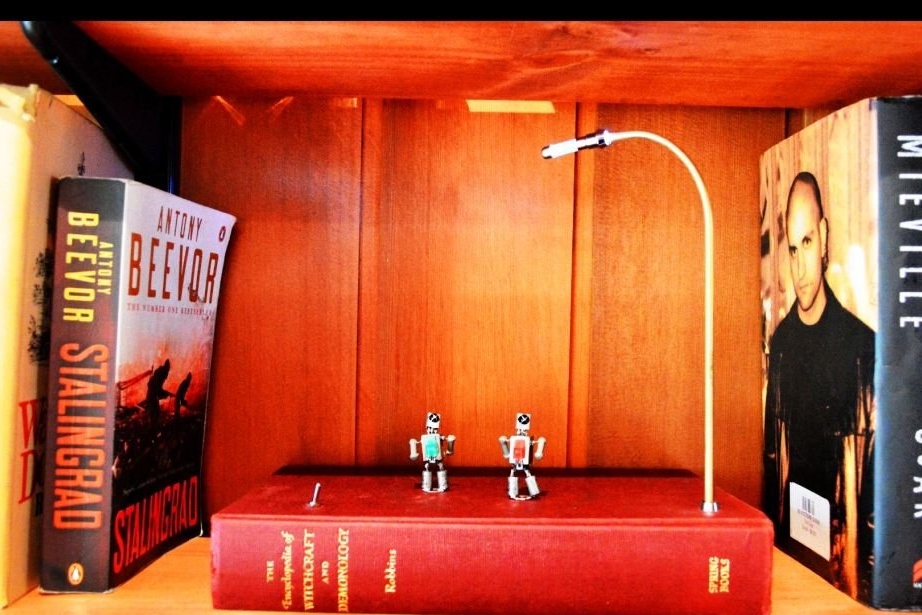
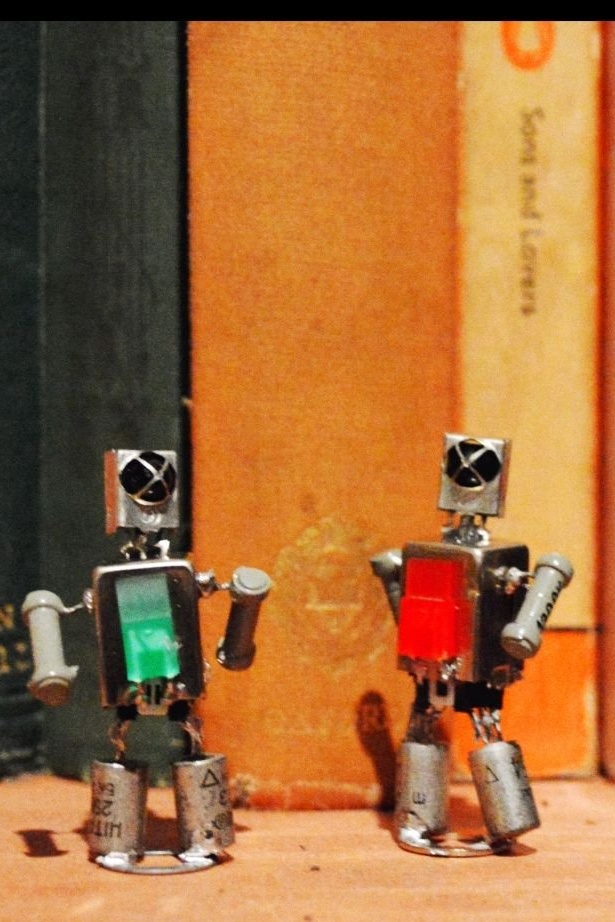
Das Ergebnis sollten Roboter sein, die auf dem Buch kreisen.
Hier sind einige wichtige Punkte, die Sie beachten sollten, wenn Sie sich für dieses Projekt entscheiden:
1. Achten Sie darauf, möglichst dünne Unterlegscheiben zu verwenden. Sie können mit Magneten experimentieren, um herauszufinden, welche Unterlegscheiben sich am besten drehen. Ich habe meine Unterlegscheiben aus dem alten Schema genommen, aber Sie können neue kaufen, wenn nichts zur Hand ist.
2. Probieren Sie verschiedene Optionen aus, wie nahe die Magnete am oberen Rand des Buches sein sollen. Mir ist aufgefallen, dass Roboter eher tanzen, wenn sich die Magnete direkt unter der Abdeckung befinden.
3. Finden Sie das richtige Buch - je dicker die Seite, desto besser.
Viel Glück, wenn Sie Fragen haben und meine Hilfe benötigen - ich werde gerne Kommentare beantworten.