
Der Assistent hat ein Gerät erstellt, das wie eine digitale Ebene + Lineal + Winkelmesser + Maßband funktioniert. Das Gerät ist klein genug, um in eine Tasche zu passen, und der Akku kann problemlos mit einem Telefonladegerät aufgeladen werden.
Dieses Gerät verwendet einen Beschleunigungsmesser und einen Gyroskopsensor zur genauen Messung von Füllstand und Winkel, einen IR-Sensor zur berührungslosen Messung einer linearen Länge von 4 bis 30 cm, einen Sensor mit einem Rad, das entlang einer gekrümmten Oberfläche gerollt werden kann, oder eine gekrümmte Linie, um die Länge eines Objekts zu messen.
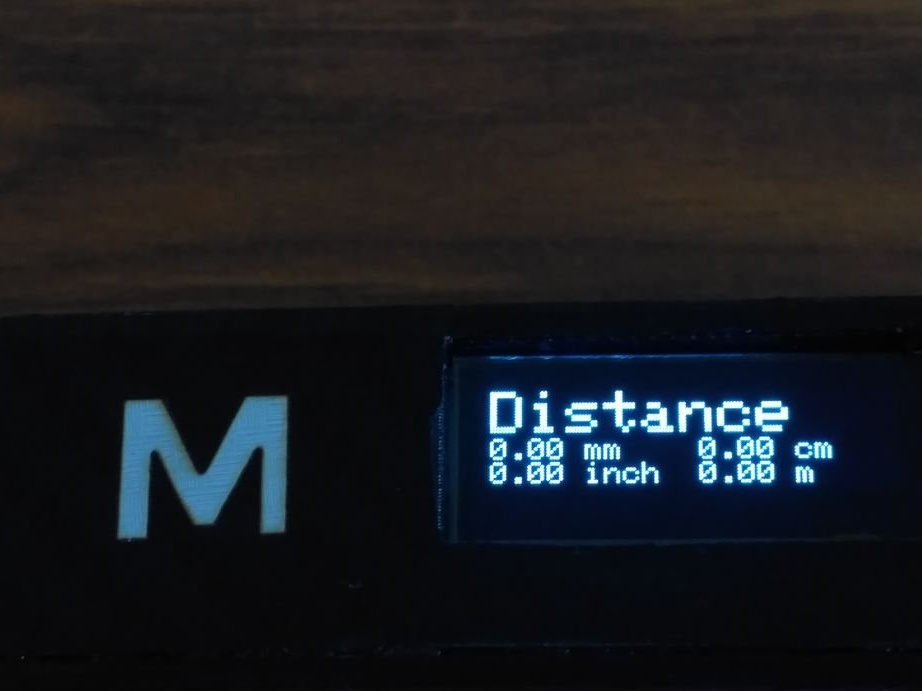
Die Navigation durch die Modi und Funktionen des Geräts erfolgt mit den Touch-Tasten M (Modus), U (Einheit) und 0 (Null).
M - Wahl zwischen verschiedenen Arten von Messungen
U - zur Auswahl zwischen Maßeinheiten mm, cm, Zoll und Meter
0 - Messwerte nach Messung von Abstand oder Winkel auf 0 zurücksetzen.
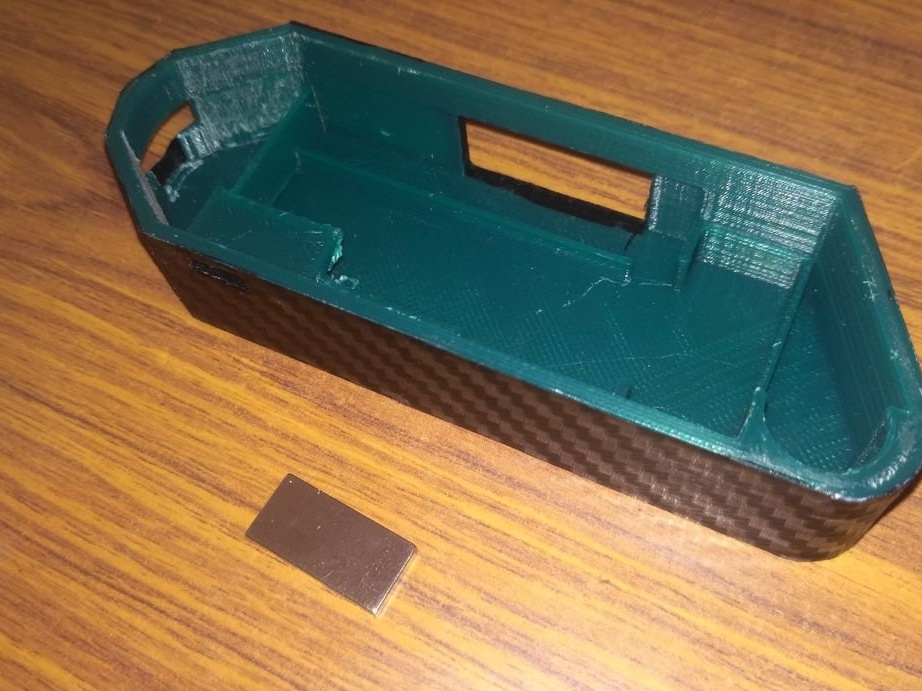
In die Basis des Geräts ist ein Neodym-Magnet eingebaut, damit es nicht rutscht und nicht von der zu messenden Metalloberfläche rutscht.
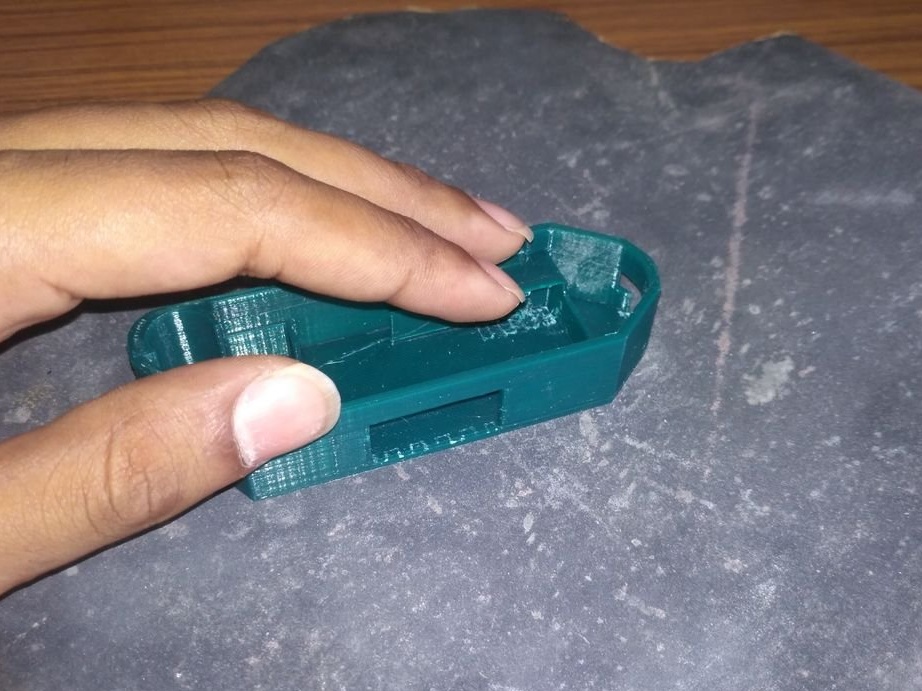
Das Gehäuse soll das Gerät so kompakt wie möglich machen.
Sehen wir uns ein Video mit Beispielen für die Funktionsweise des Geräts an.
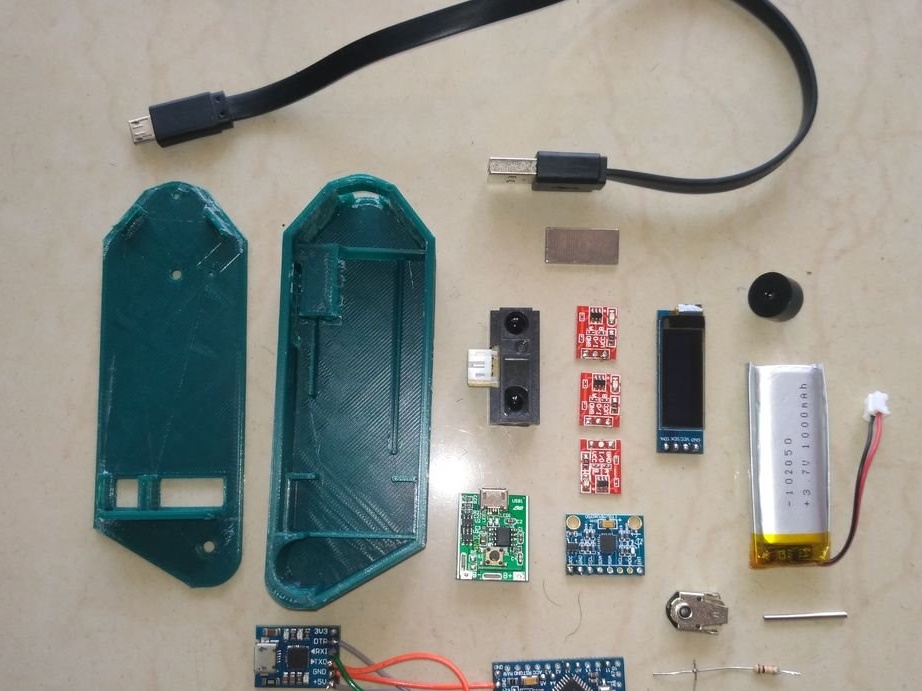
Werkzeuge und Materialien:
-IR Abstandssensor Sharp GP2Y0A41SK0F;
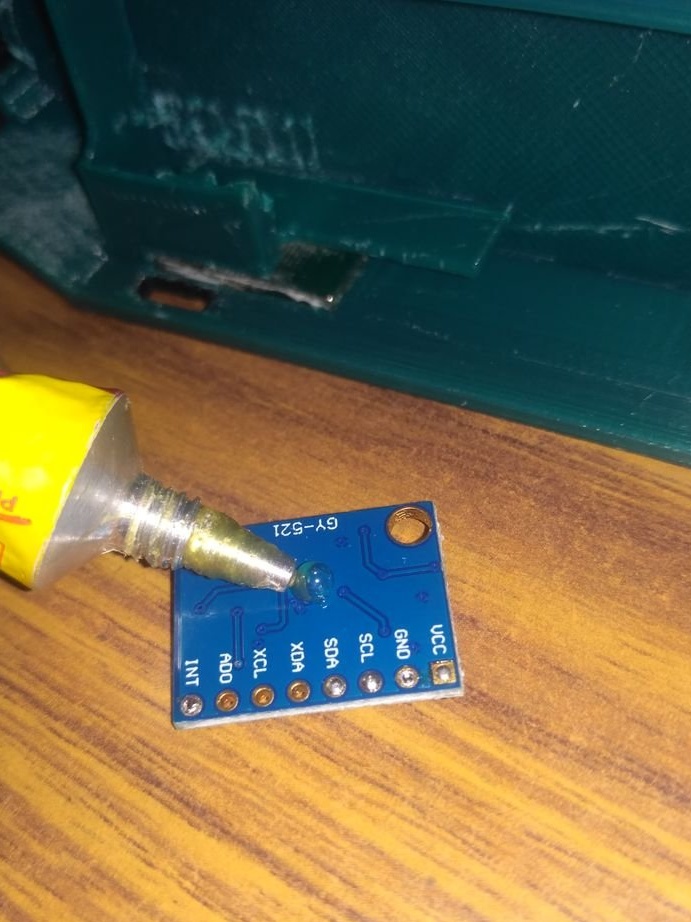
- Modul MPU6050 Beschleunigungsmesser / Gyroskop;
-Lademodul;
Encoder
-128 x 32 OLED-Display;
-Arduino Pro Mini ATMEGA328 5 V / 16 MHz;
-12 mm Summer;
-3,7 V, 1000 mAh Lithium-Polymer-Batterie;
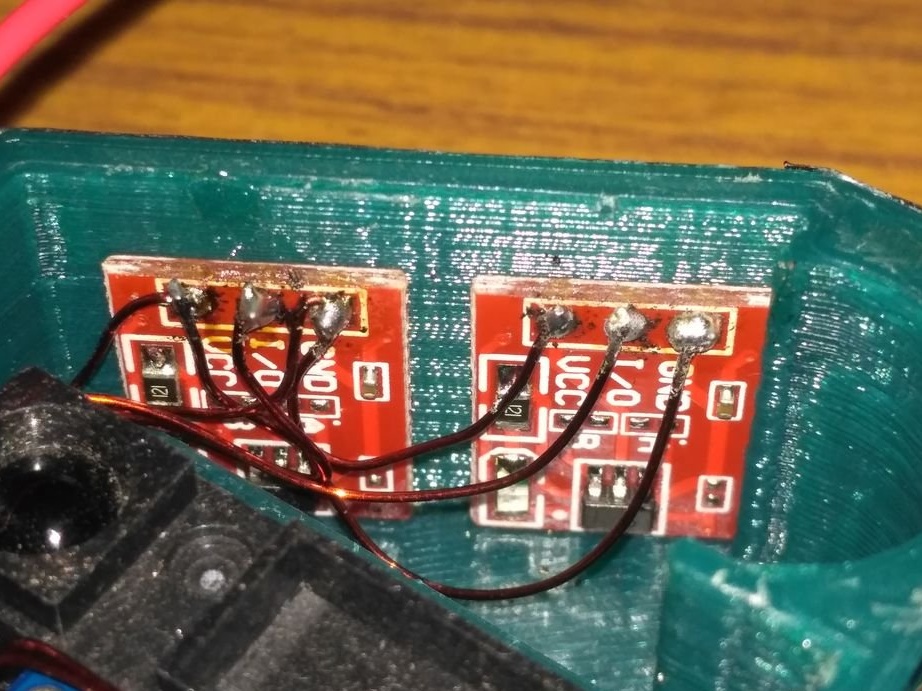
- TTP223 Touch-Button-Modul - 3 Stk.;
- Neodym-Magnet 20 x 10 x 2 mm;
-Konverter-Schnittstelle CP2102;
Emaillierter Kupferdraht;
-Resistoren 10K - 2 Stk;
- Stahlstange 19 mm lang mit einem Durchmesser von 2 mm;
-LED LED;
-Vinylfilm;
- Micro-USB-Kabel;
- Schere;
-Messer;
- Pinzette;
-Kleberpistole;
-Superkleber;
-Lötzubehör;
-Laser Cutter;
- 3D-Drucker;
-Nipper;
-Schleifpapier;

Erster Schritt: Der Fall
Zunächst druckt der Assistent einen Fall auf einem 3D-Drucker. Dateien zum Drucken können unten heruntergeladen werden.
BODY.stl
Lid.stl
rad.stl
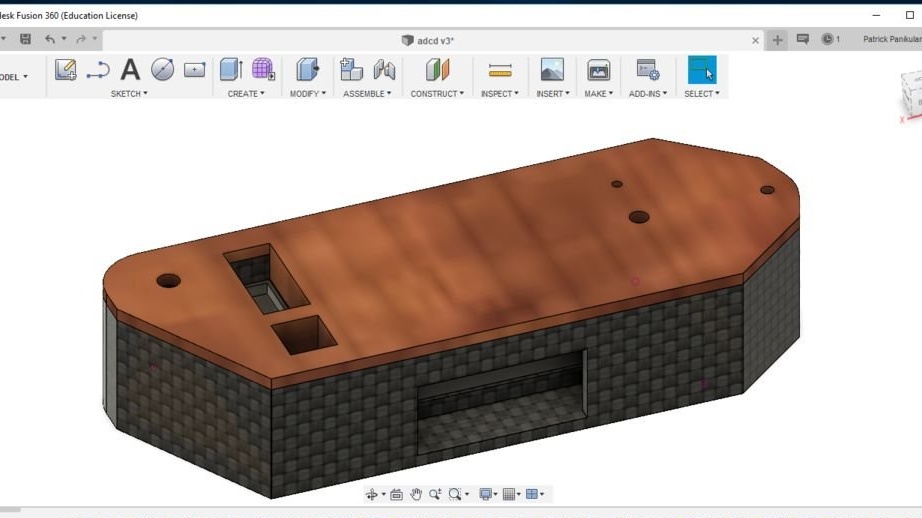
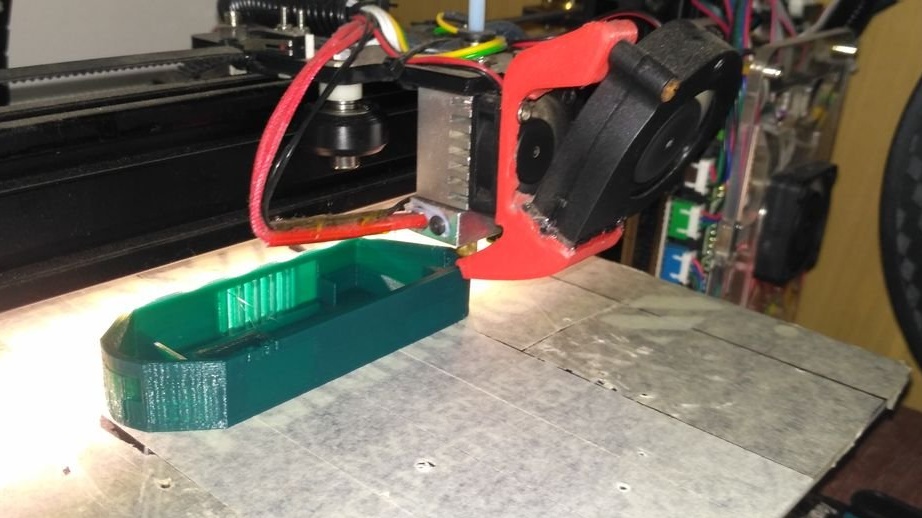
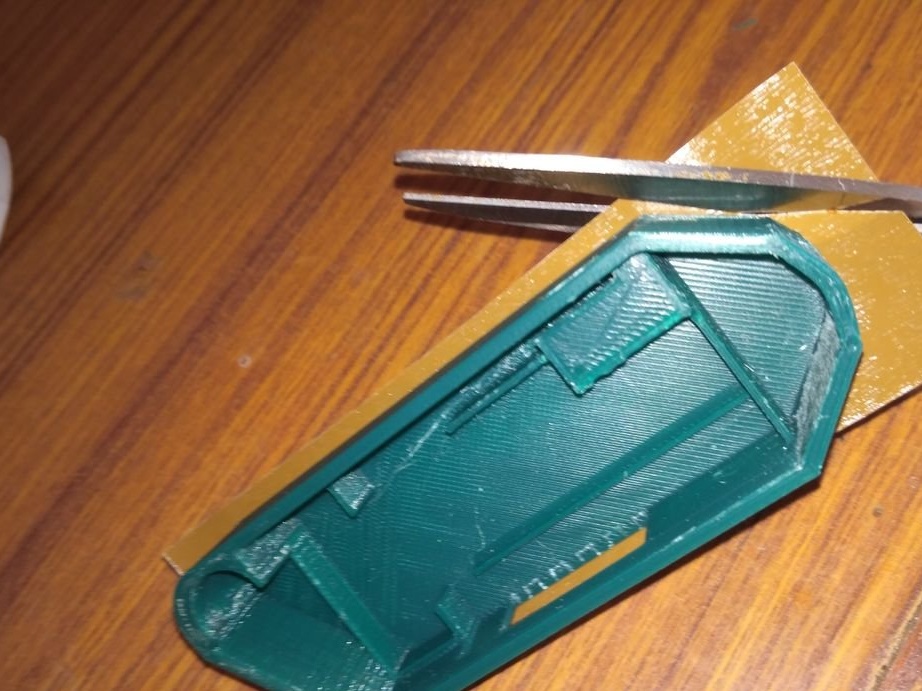
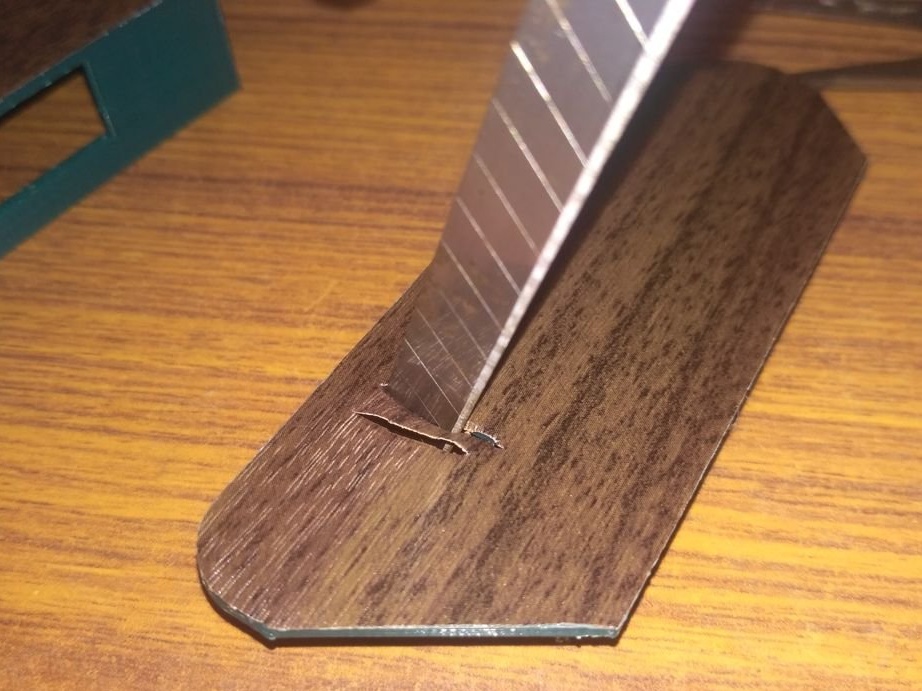
Es klebt das Gehäuse mit Vinylfolie und schleift zuvor seine Oberfläche.







Schritt zwei: Schema
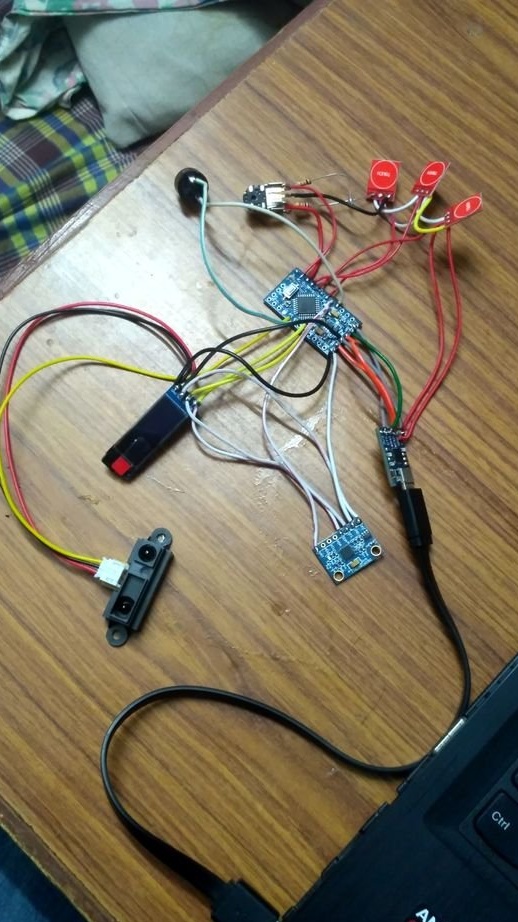
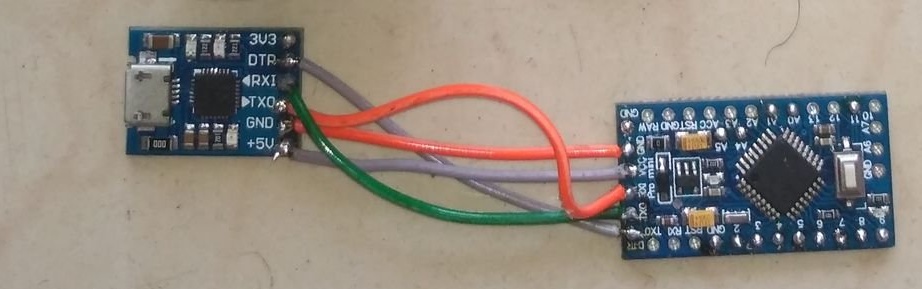
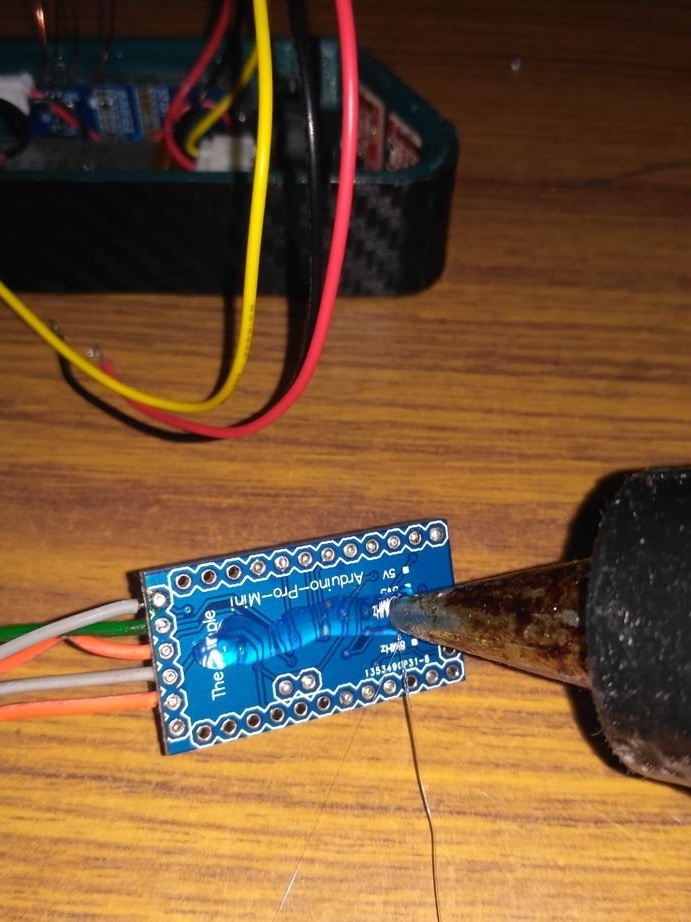
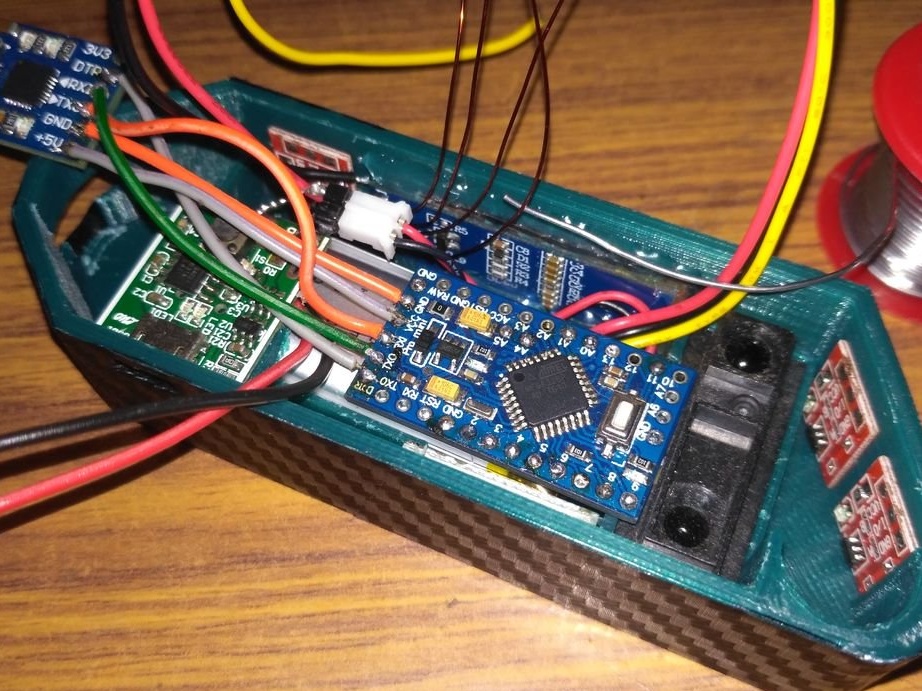
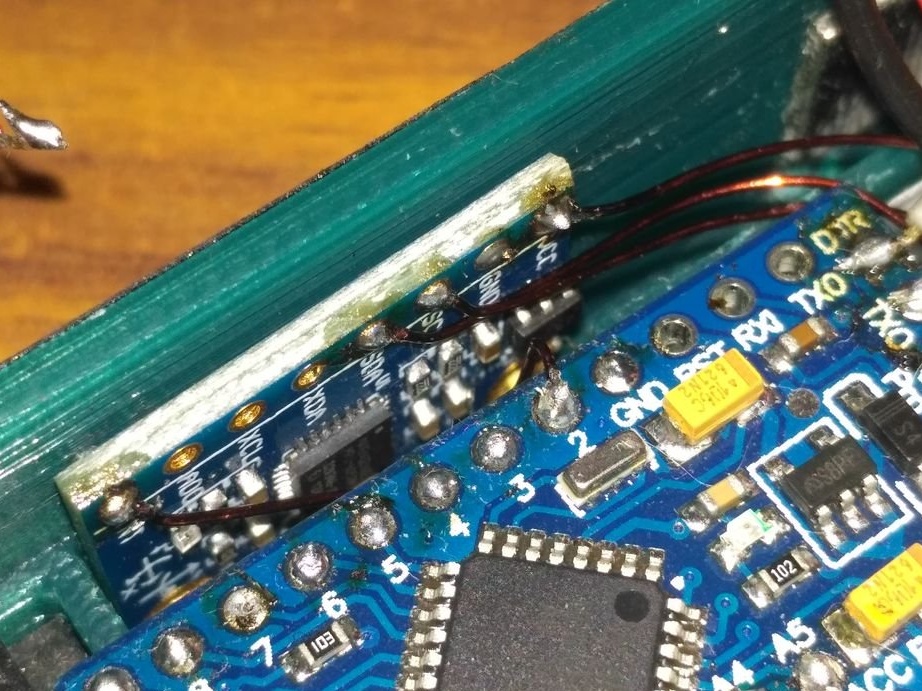
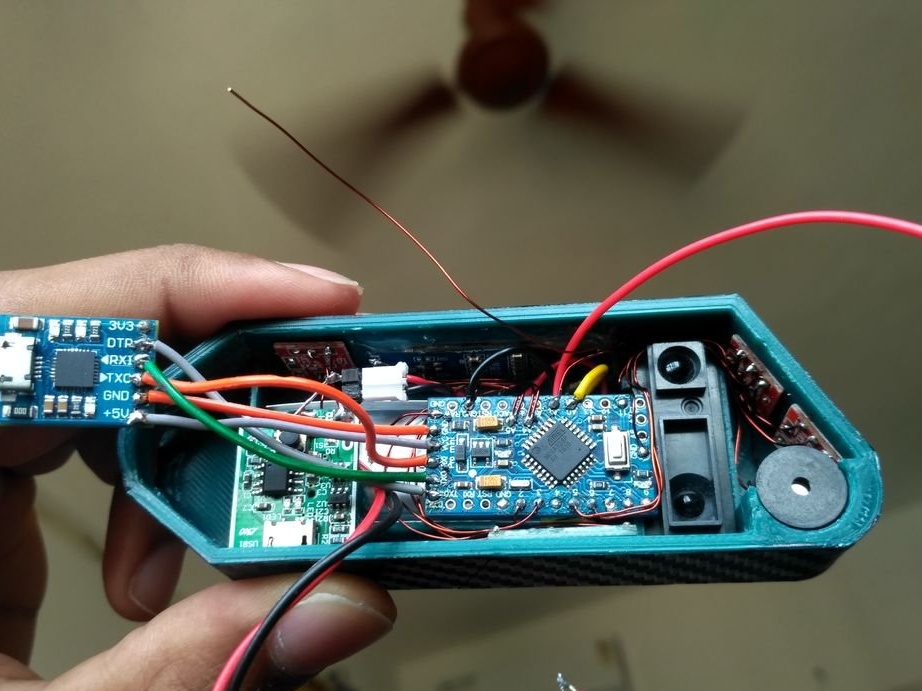
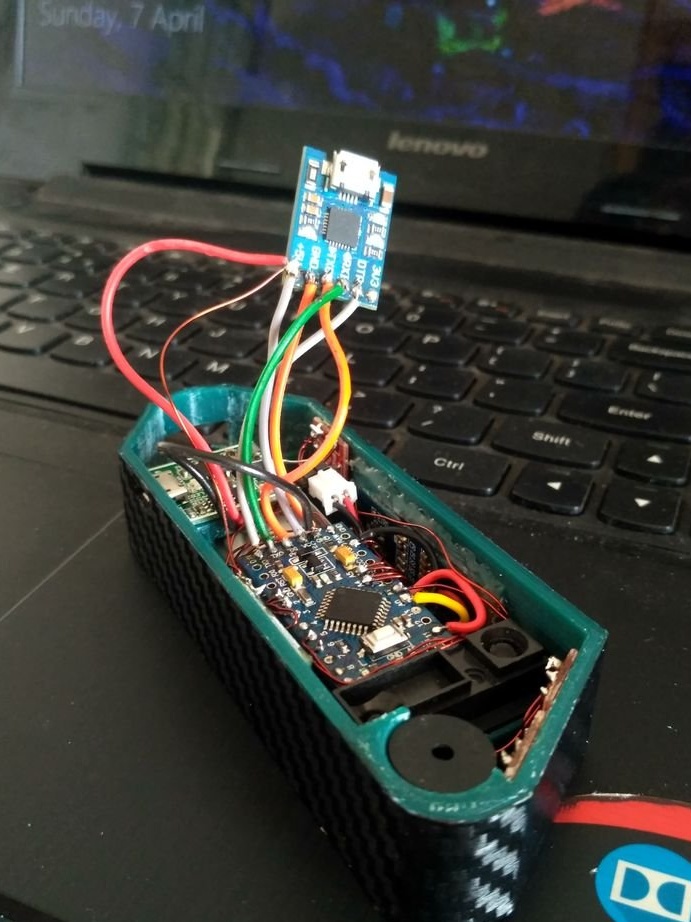
Im Gegensatz zu Arduino nano, pro mini kann nicht direkt durch Anschließen eines USB-Kabels programmiert werden. Daher müssen Sie zuerst einen externen USB-Anschluss an den Pro-Mini-Konverter anschließen, um ihn zu programmieren. Das erste Foto zeigt, wie diese Verbindungen hergestellt werden sollen.
Vcc - 5V
GND - GND
RXI - TXD
TXD - RXI
DTR - DTR
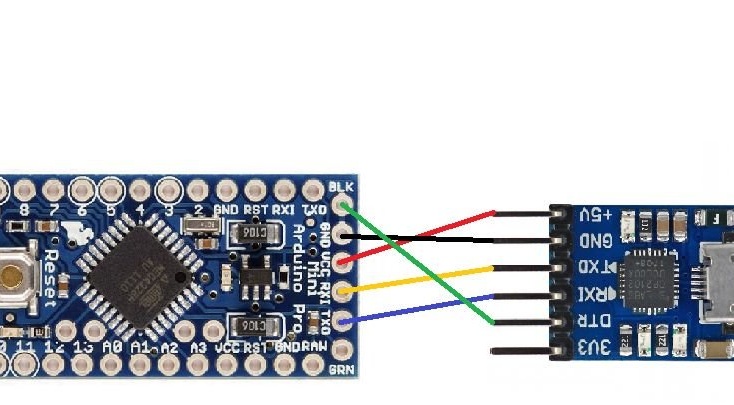
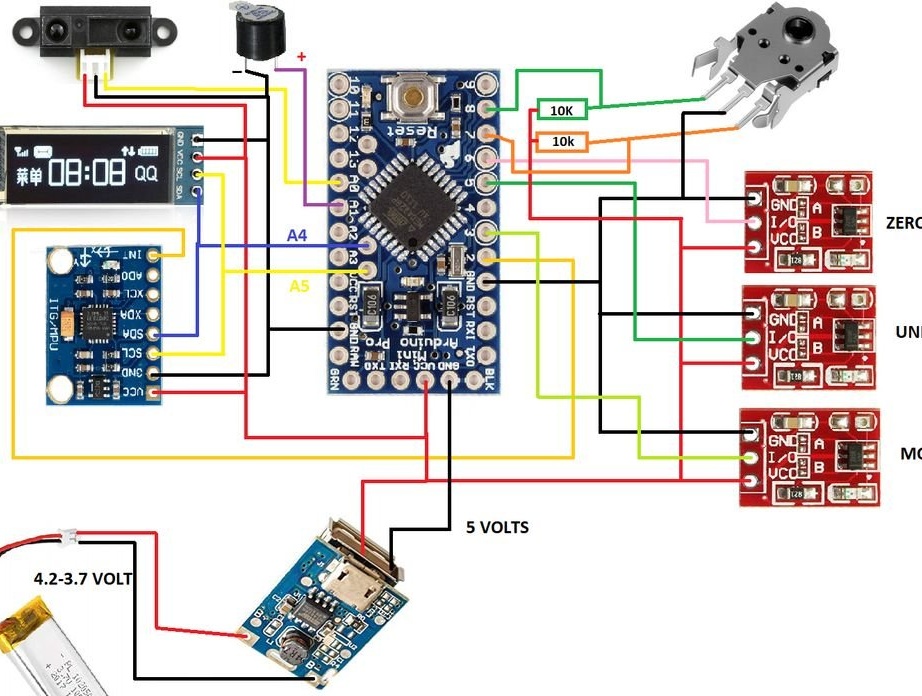
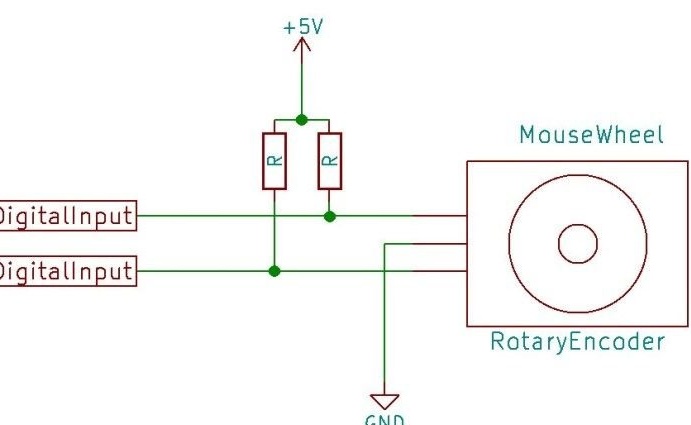
Das 2. Bild zeigt den vollständigen Schaltplan dieses Projekts.
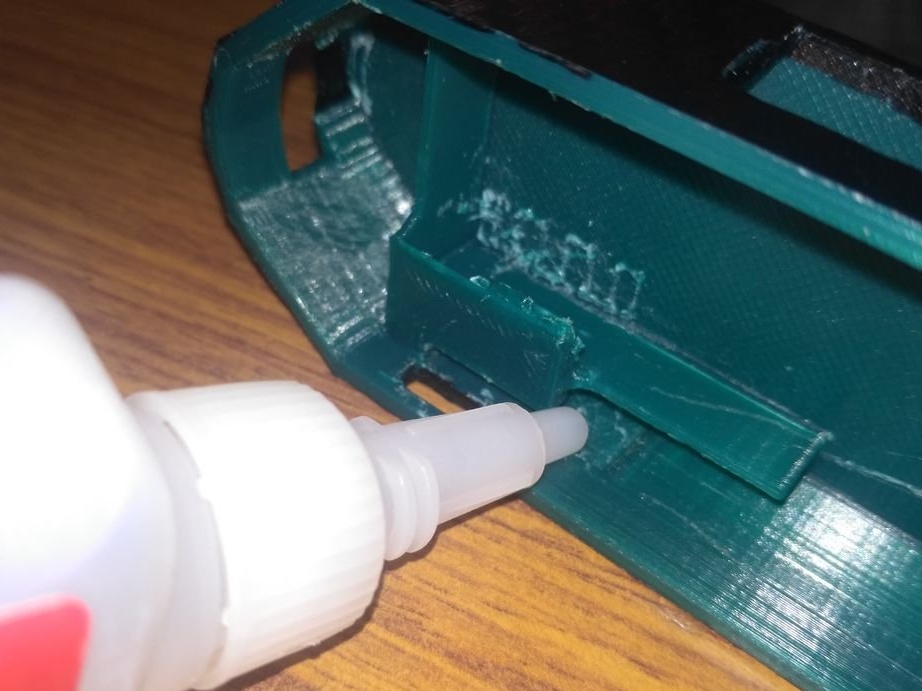
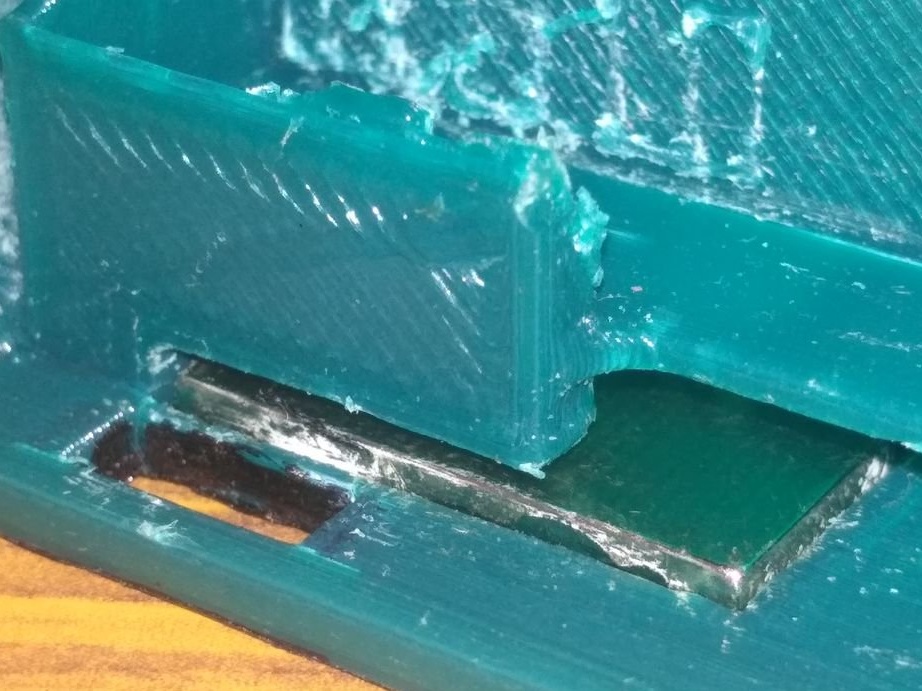
Schritt drei: Magnet
Klebt den Magneten auf den Körper.

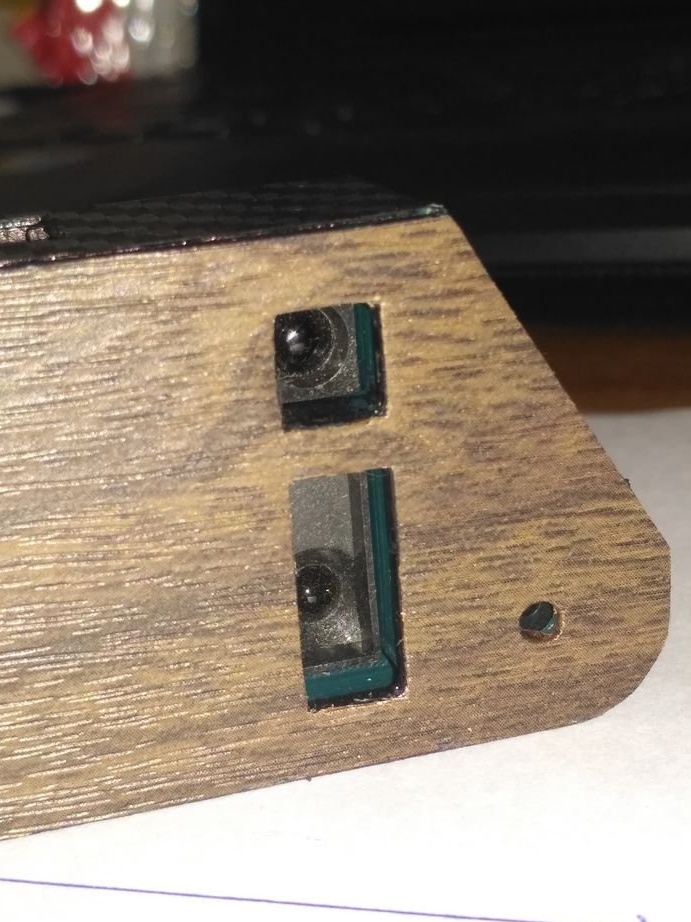
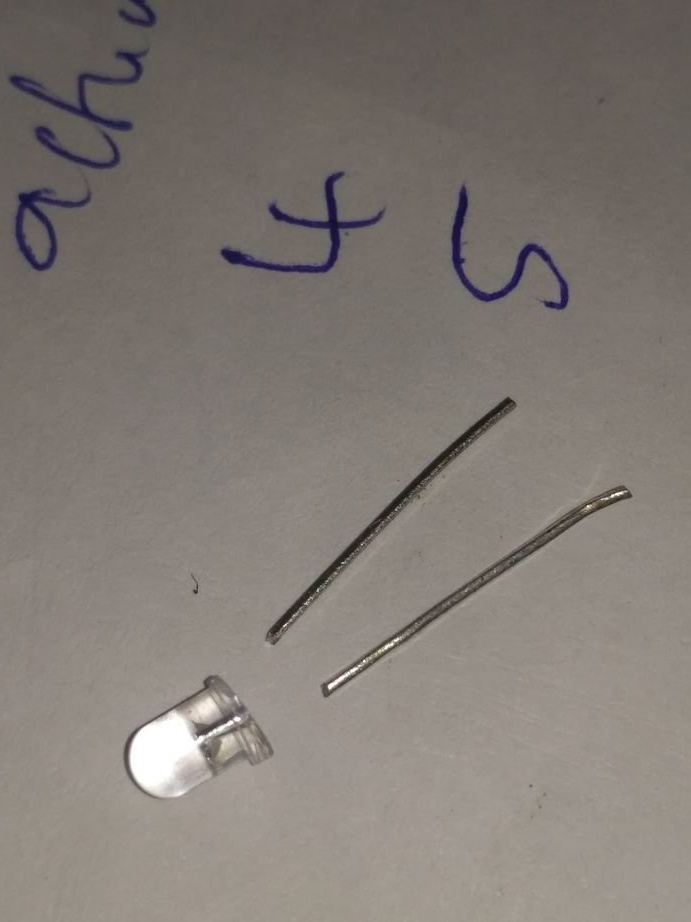
Schritt vier: Sensorausrichtung
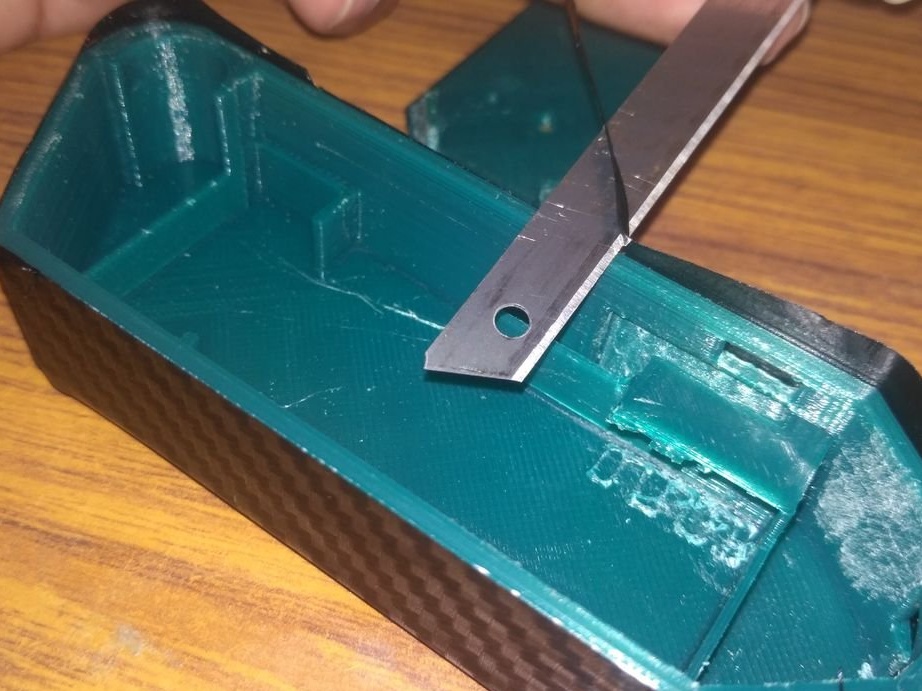
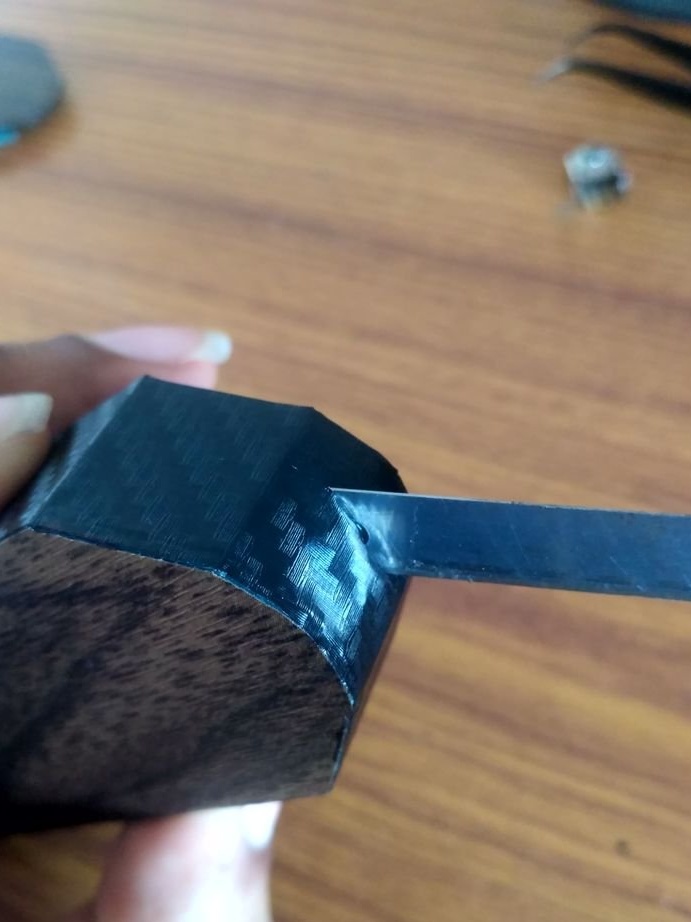
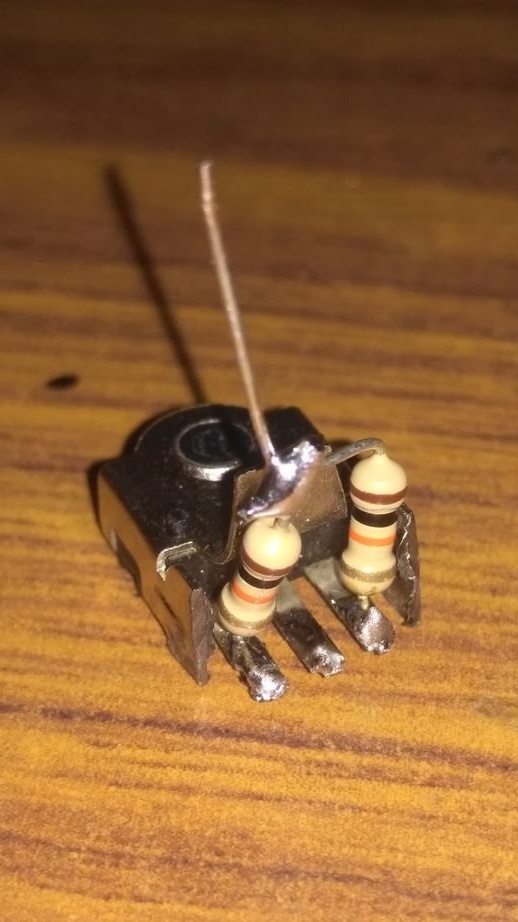
Um die Größe zu verringern, werden der IR-Sensor und der Encoder abgeschnitten.






Fünfter Schritt: Anzeigen
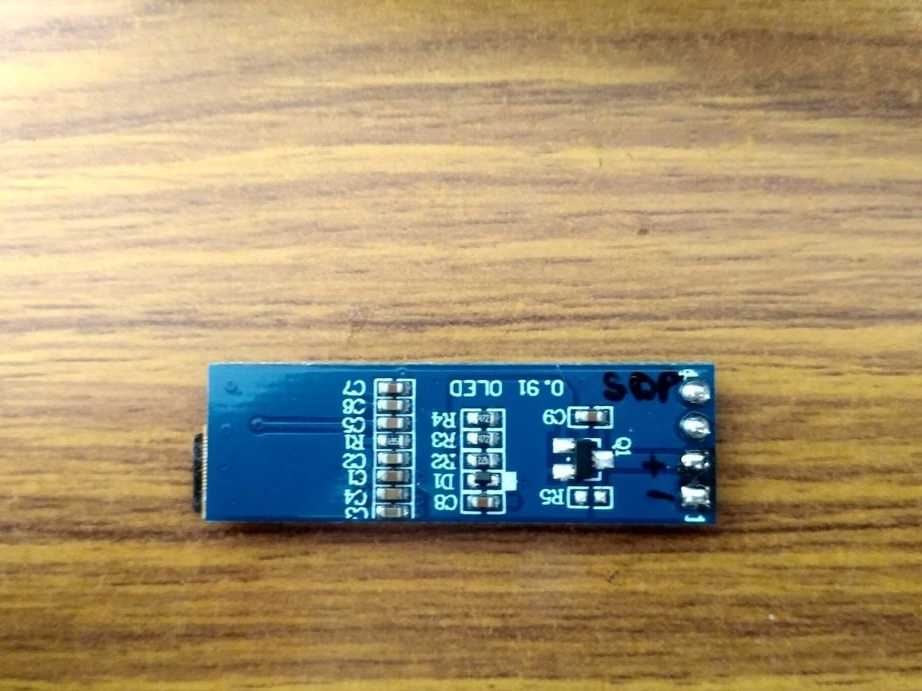
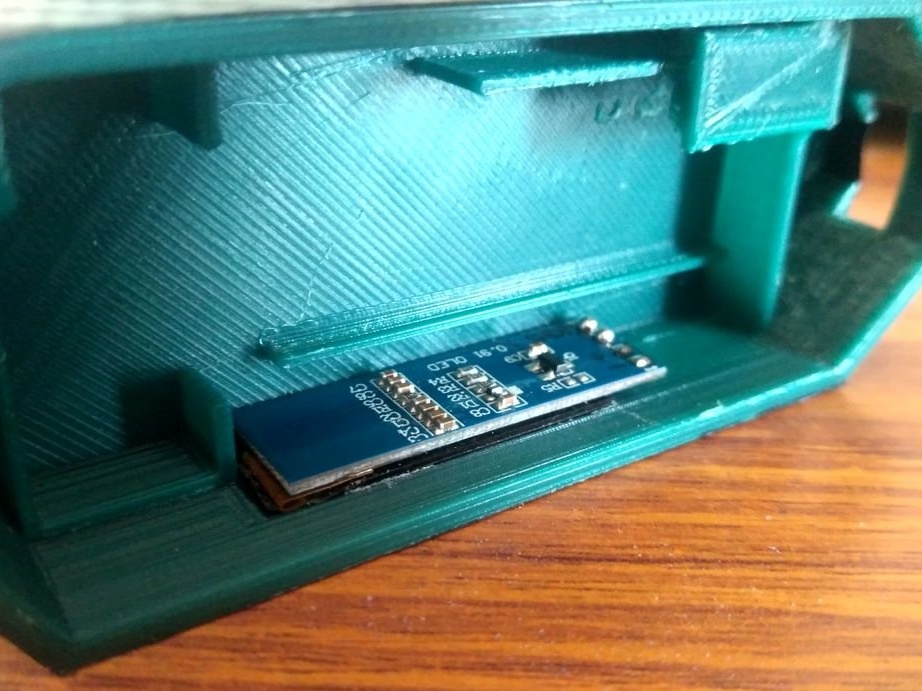
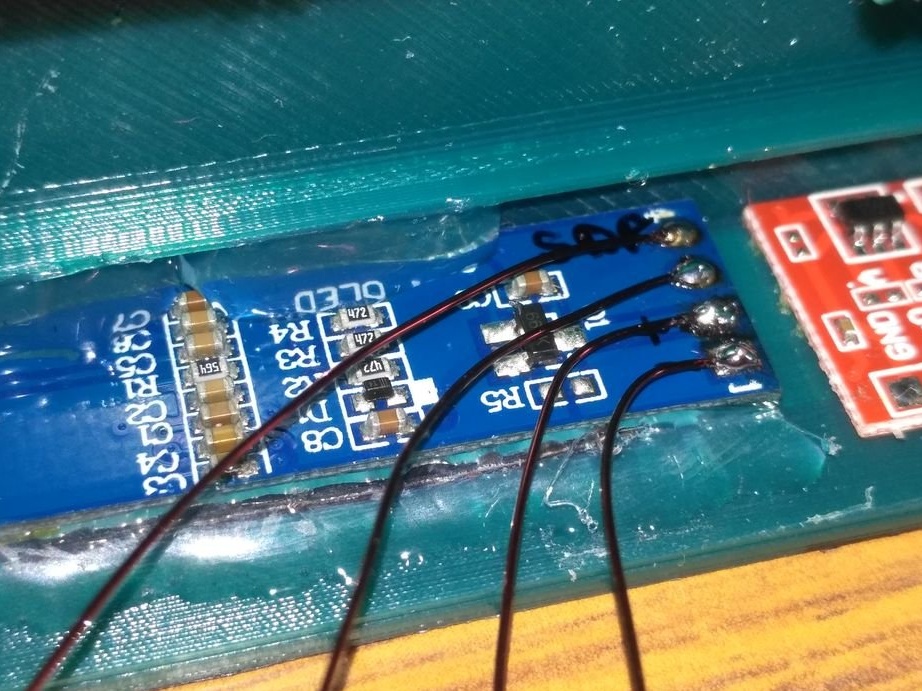
Markiert die Namen der Kontakte auf der Rückseite des OLED-Displays, damit Sie anschließend die richtigen Verbindungen herstellen können. Stellt die OLED-Anzeige auf die richtige Position ein, wie in der zweiten Abbildung gezeigt. Fixiert die Anzeige mit Heißkleber.

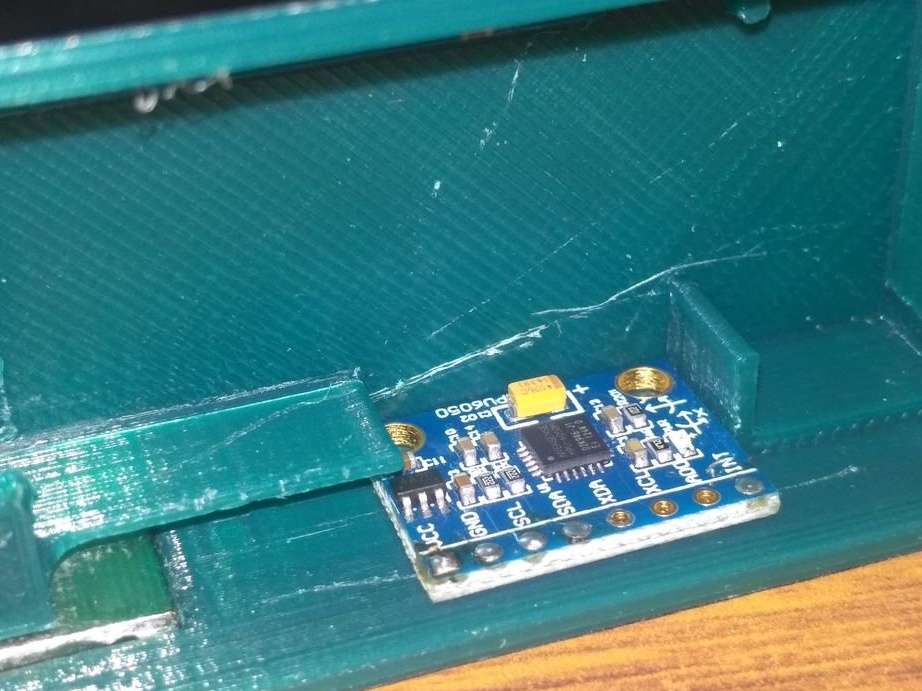
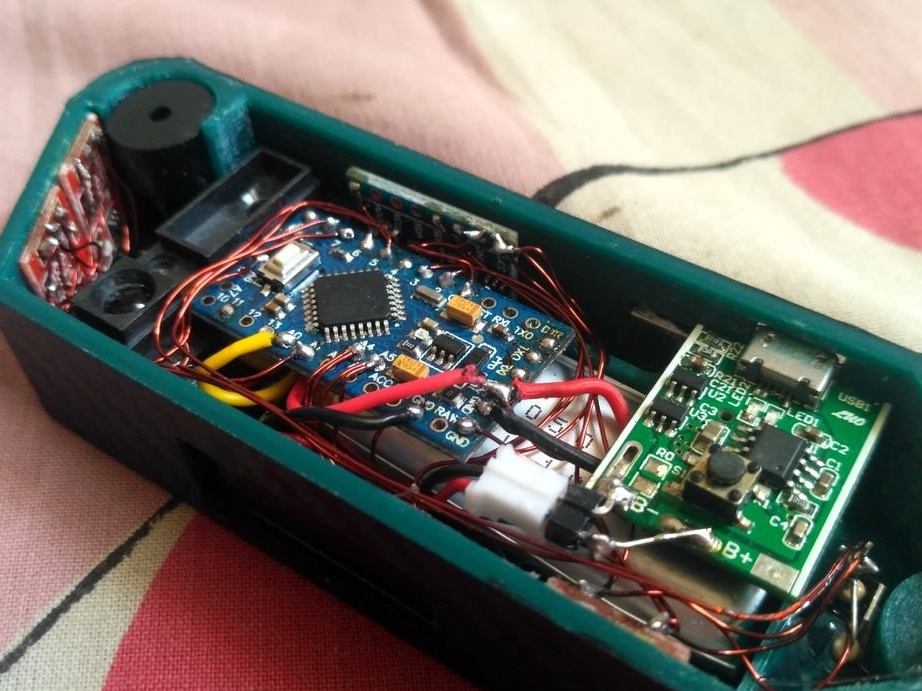
Schritt Sechs: Module
Klebt das Sensormodul und die MPU6050.


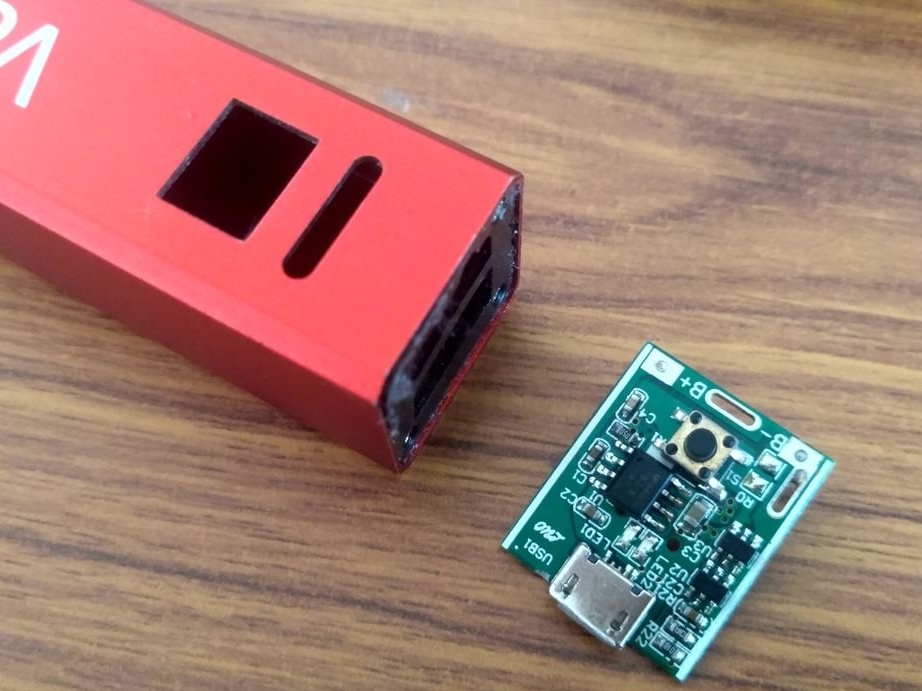
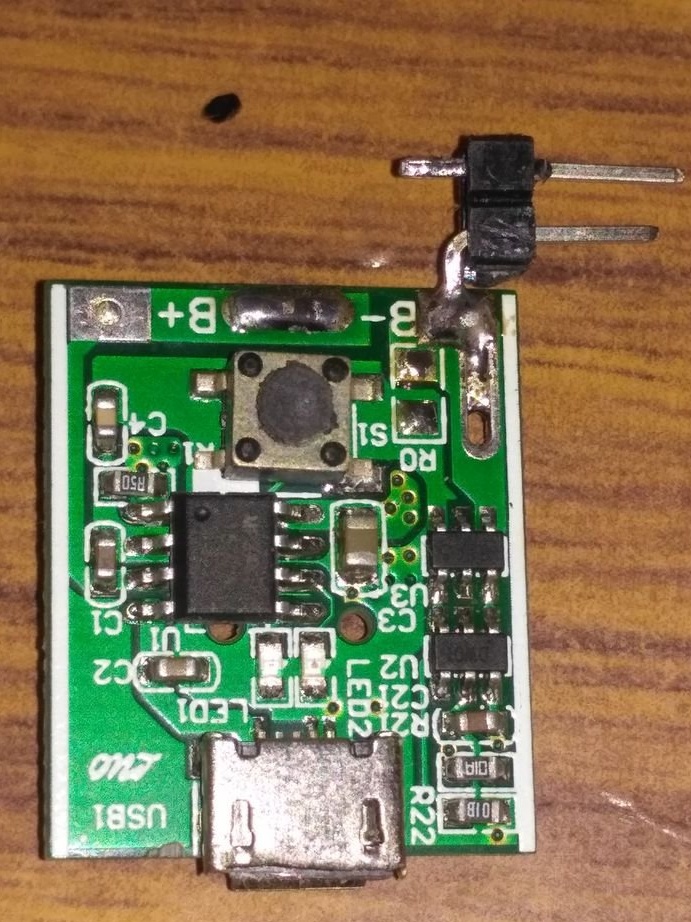
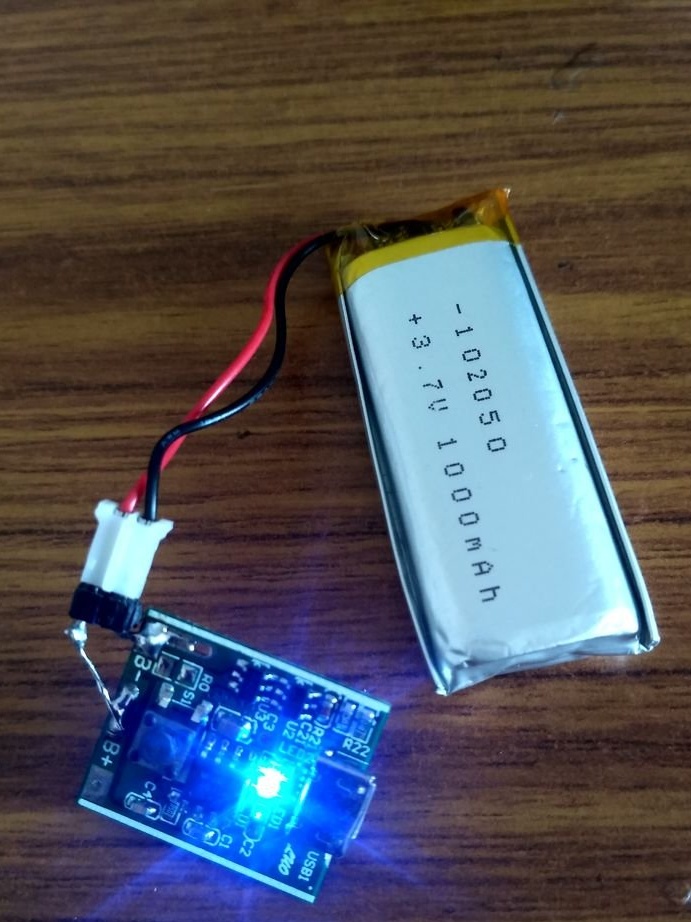
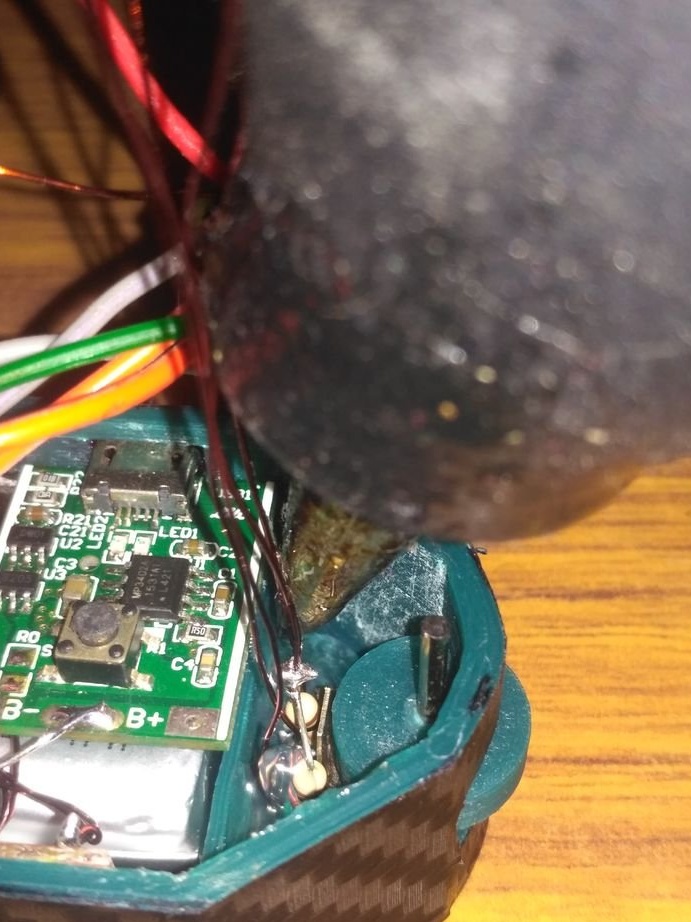
Siebter Schritt: Lademodul und Akku
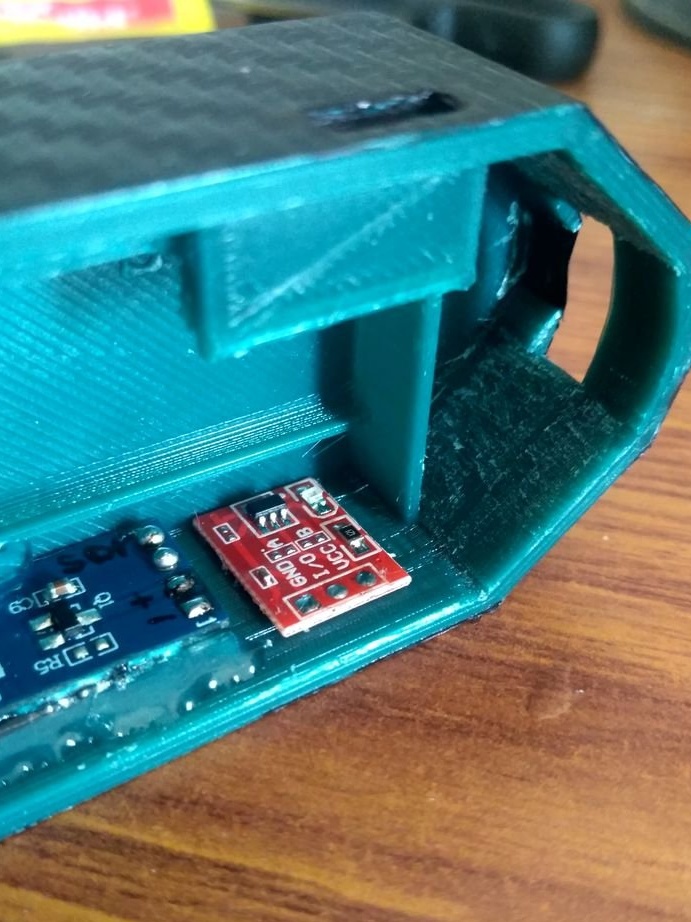
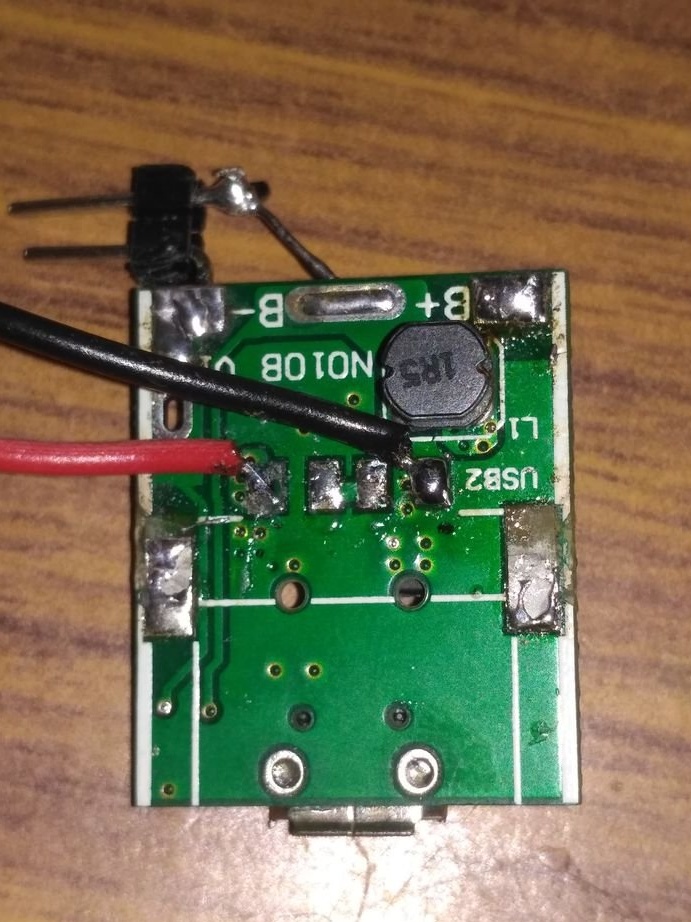
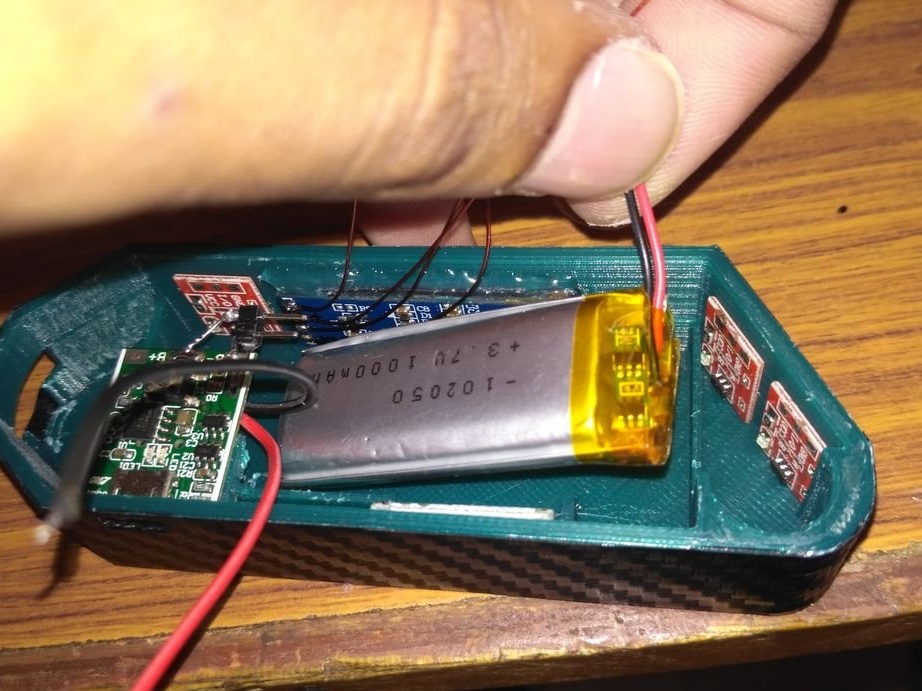
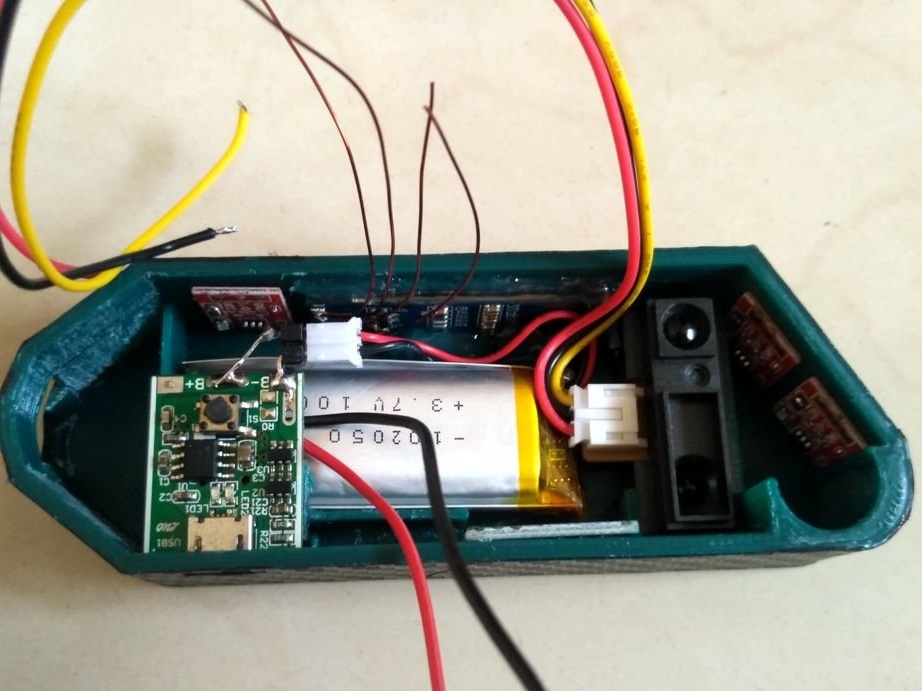
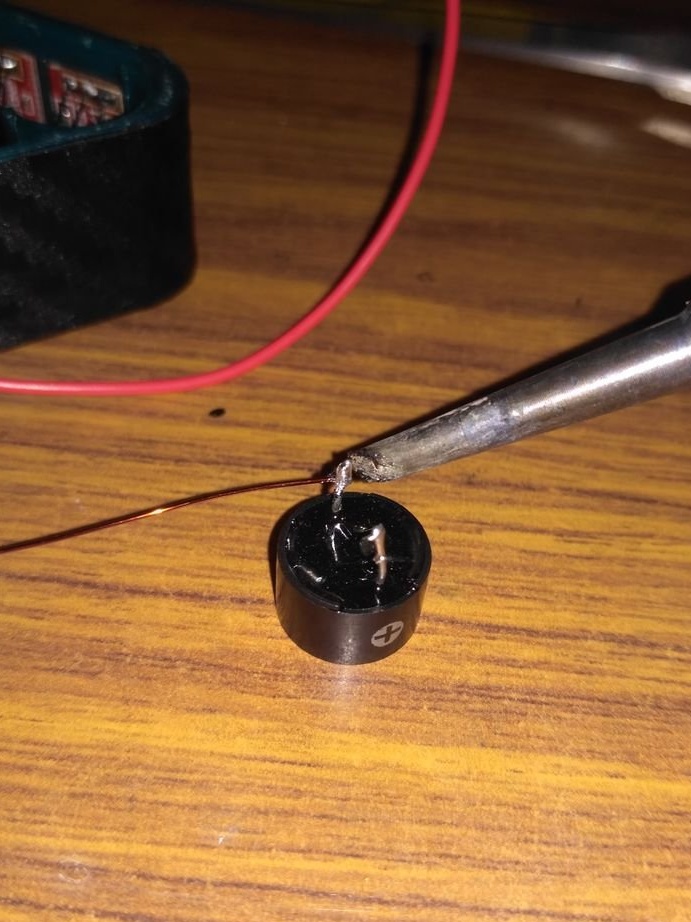
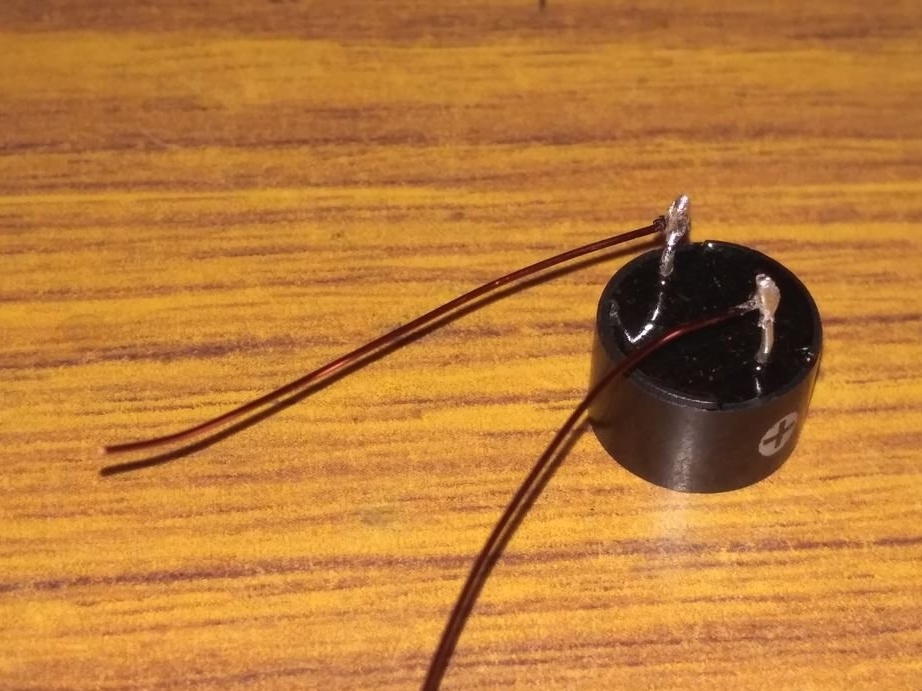
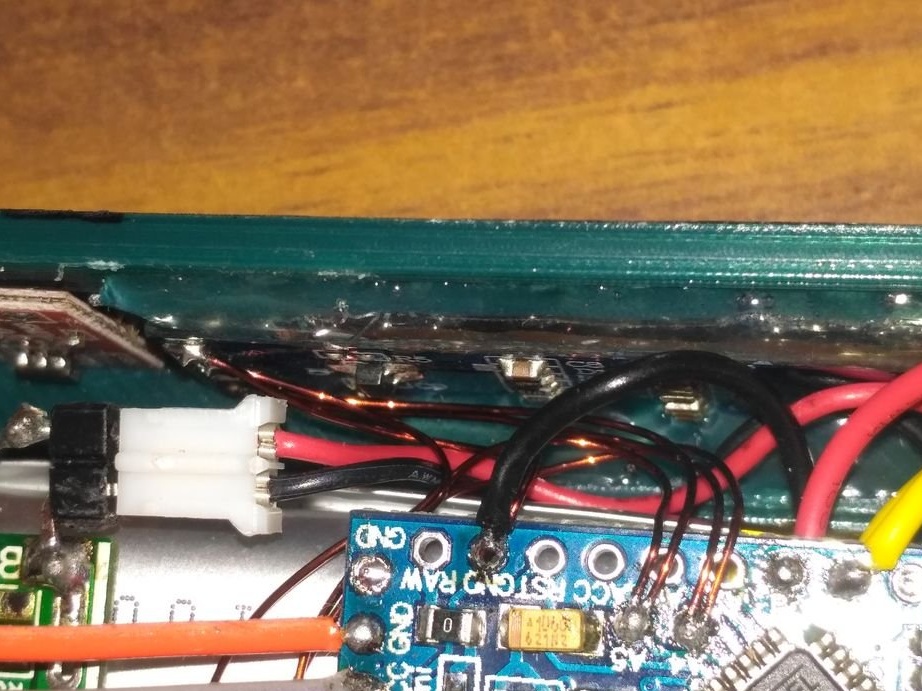
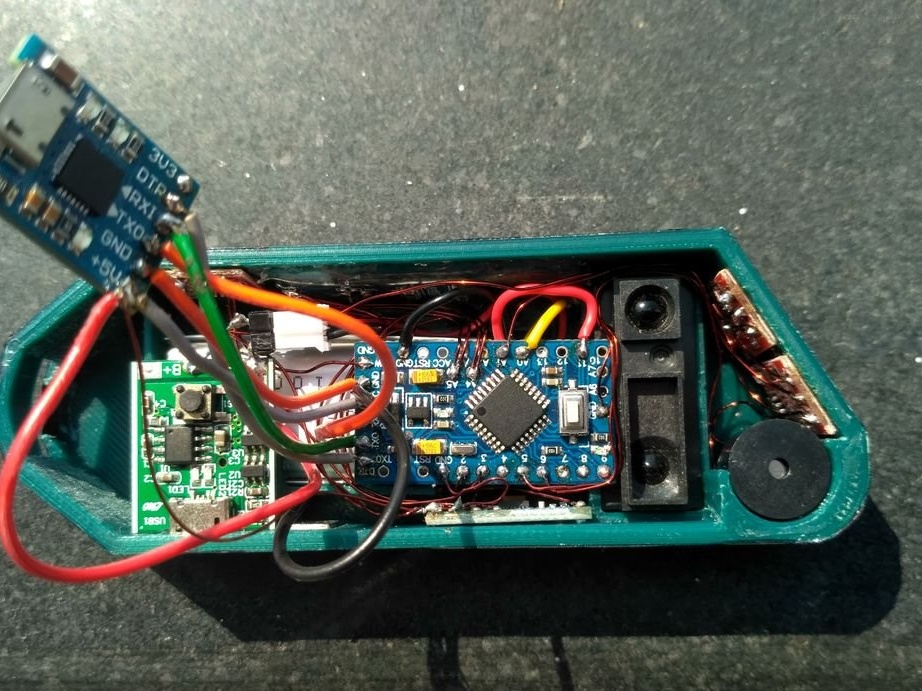
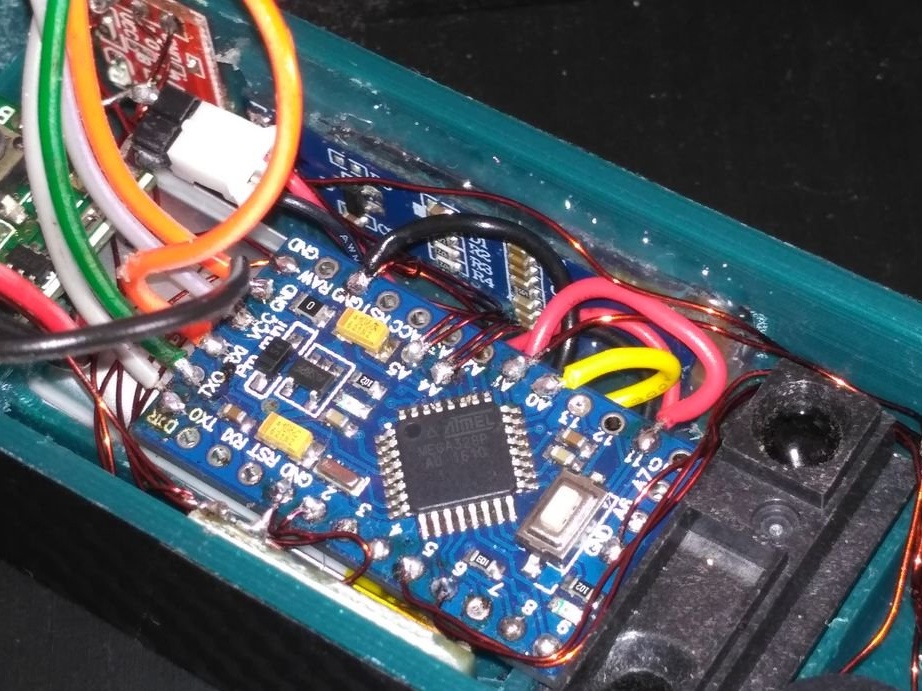
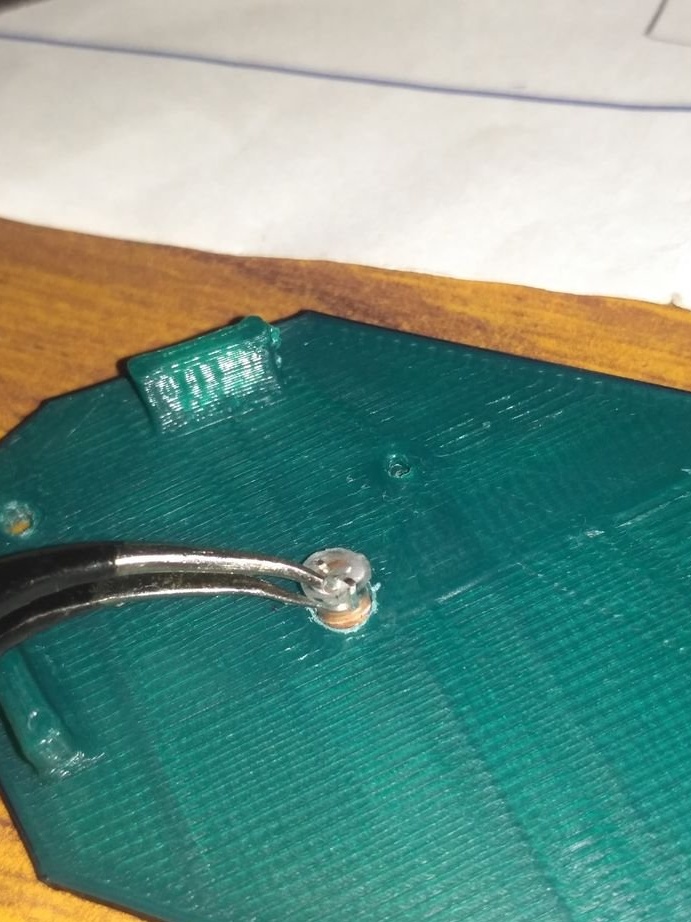
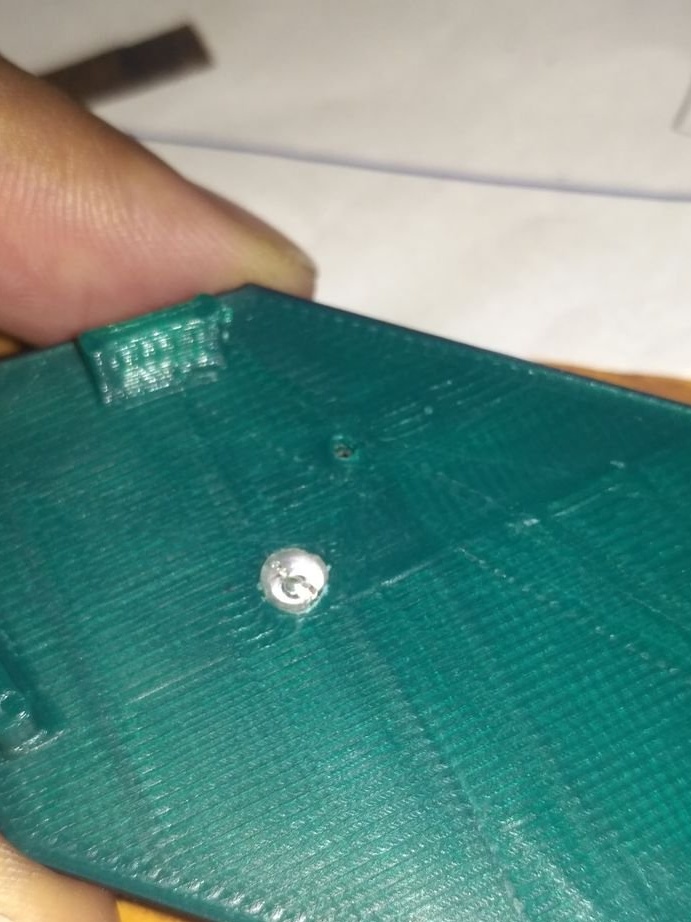
Dieses Modul verfügt sowohl über eine Batterieschutzschaltung als auch über einen Aufwärtswandler (5 V, 1 A). Außerdem verfügt es über einen Ein- / Ausschalter, der als Netzschalter verwendet werden kann. Der USB-Anschluss des Moduls wurde mit einem Lötkolben entfernt, und zwei Drähte wurden an die + 5-V-Anschlüsse und an Masse gelötet, wie auf dem 4. Foto gezeigt.
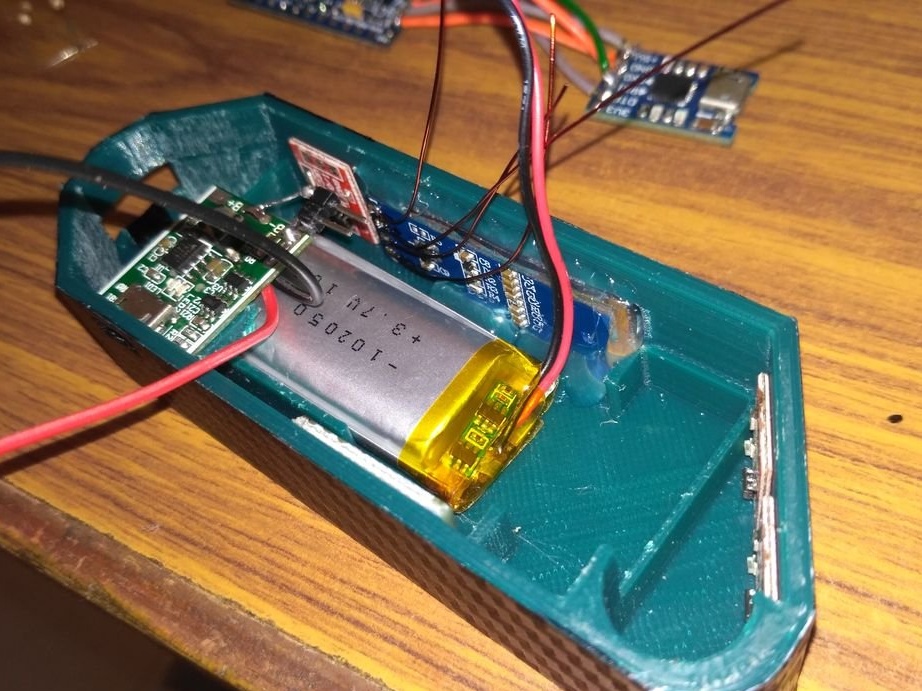
Als nächstes müssen Sie die 2 Stecker an B + und B- löten, wie auf den ersten beiden Fotos gezeigt, und dann prüfen, ob das Modul mit der Batterie funktioniert.
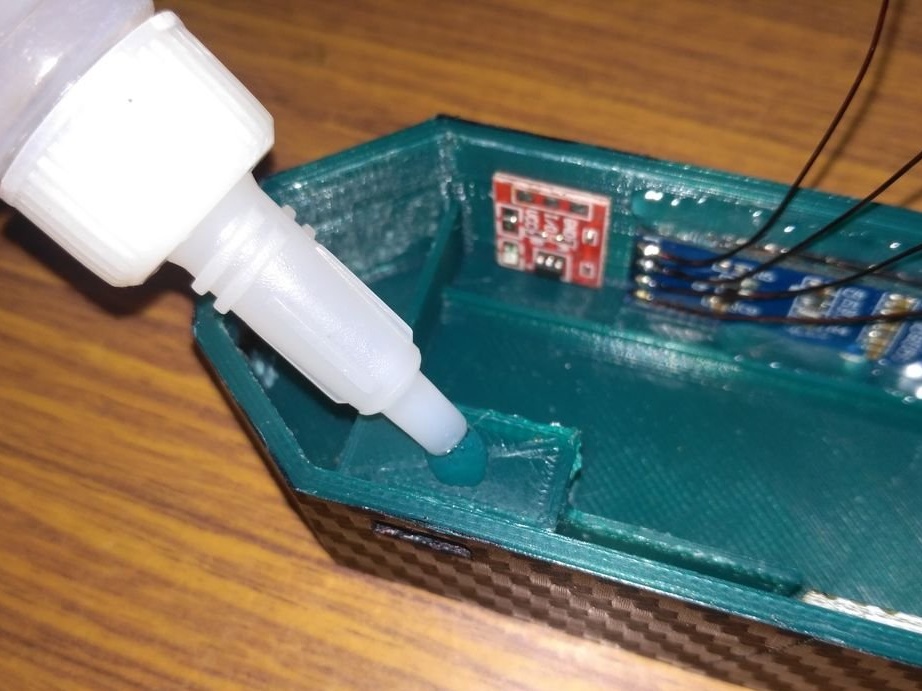
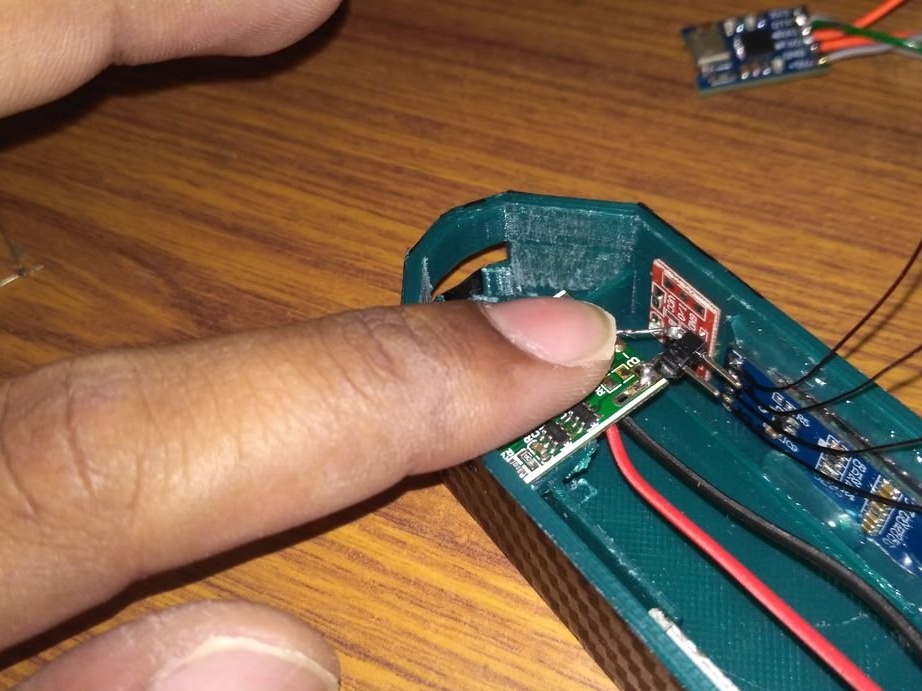
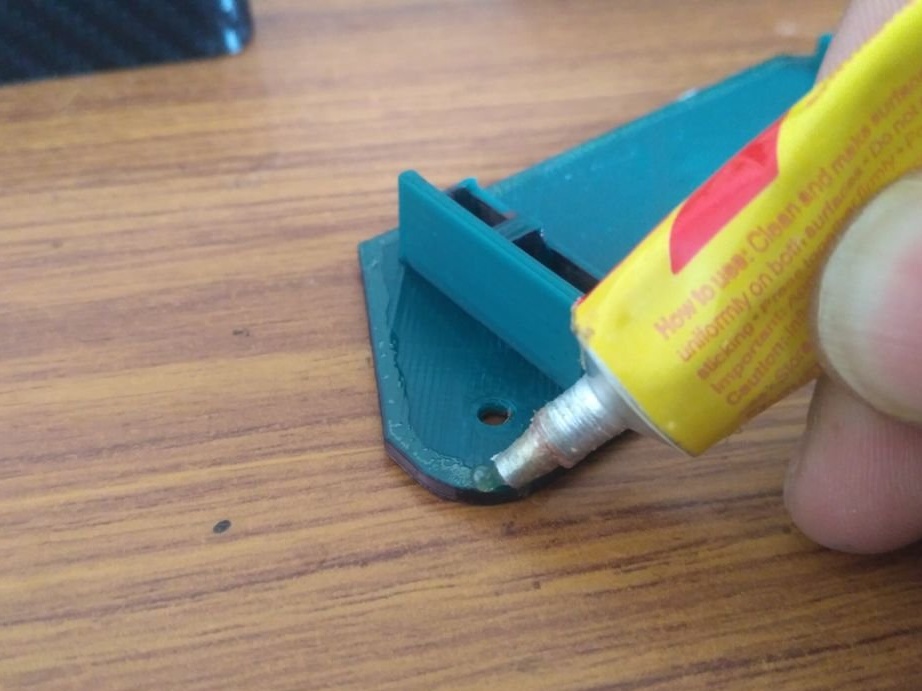
Jetzt müssen Sie Klebstoff auf die für das Modul bereitgestellte Plattform auftragen und das Modul vorsichtig platzieren. Achten Sie dabei darauf, dass der Ladeanschluss und das Loch genau in den Löchern installiert sind.

Schritt acht: Installieren der Batterie und des IR-Sensors
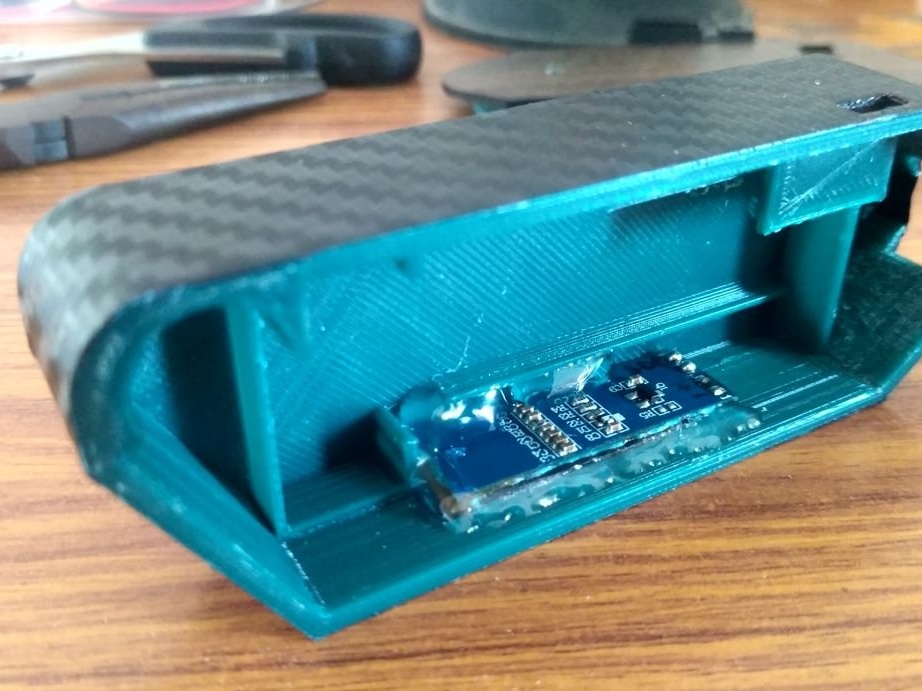
Löten Sie die Drähte an die Anzeigestifte. Installiert die Batterie und den IR-Sensor.

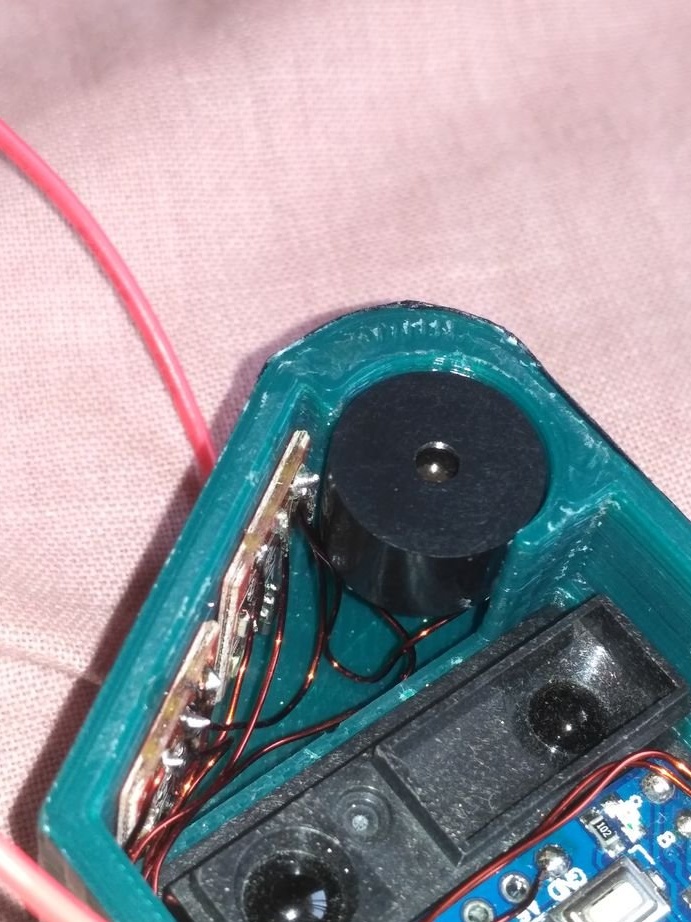
Schritt neun: Summer und Lademodul
Gemäß dem Schema werden das Lademodul und der Summer montiert.

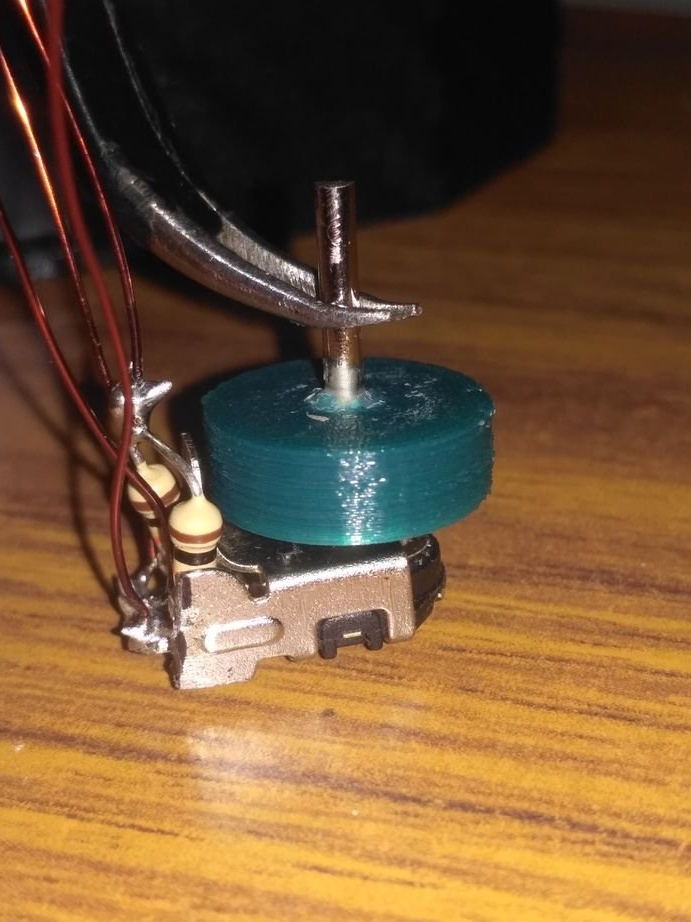
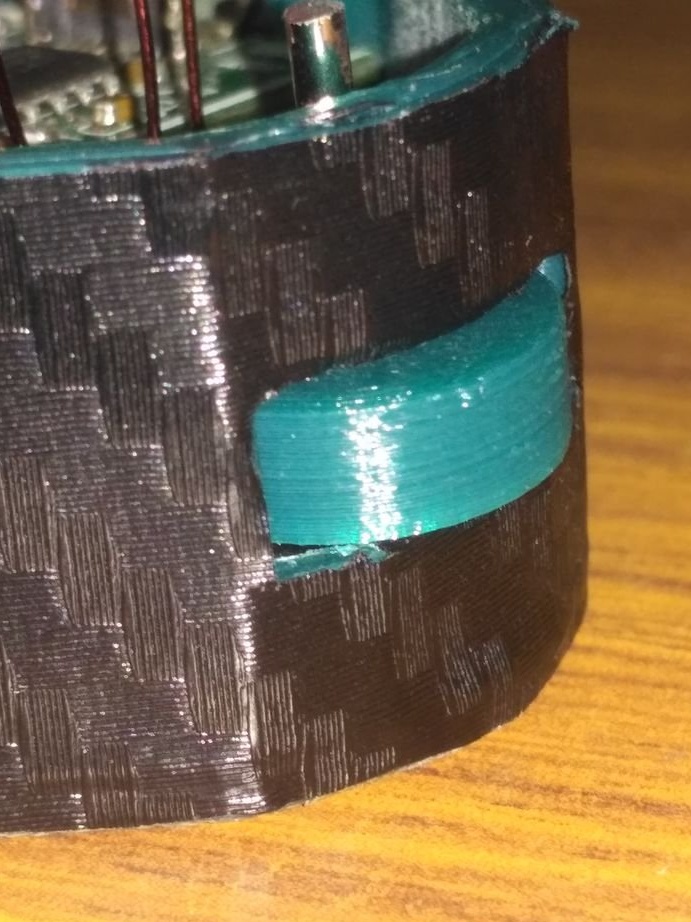
Schritt 10: Encoder
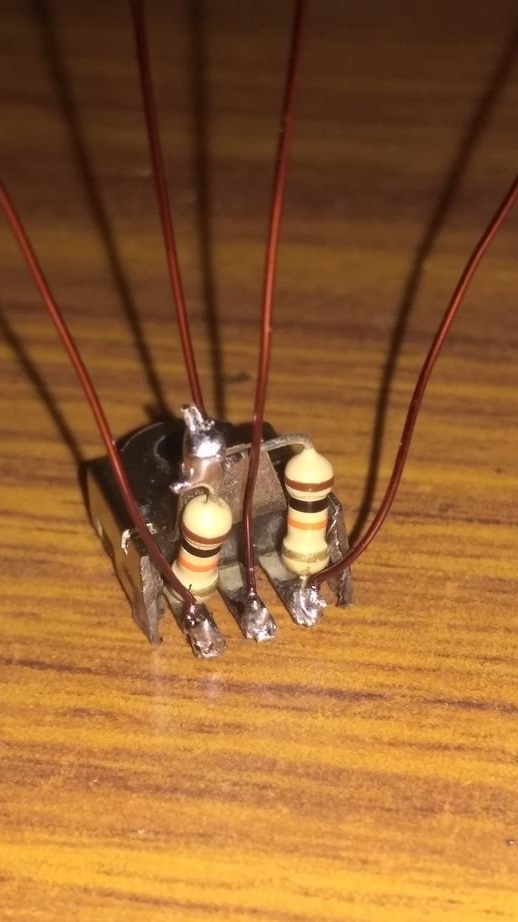
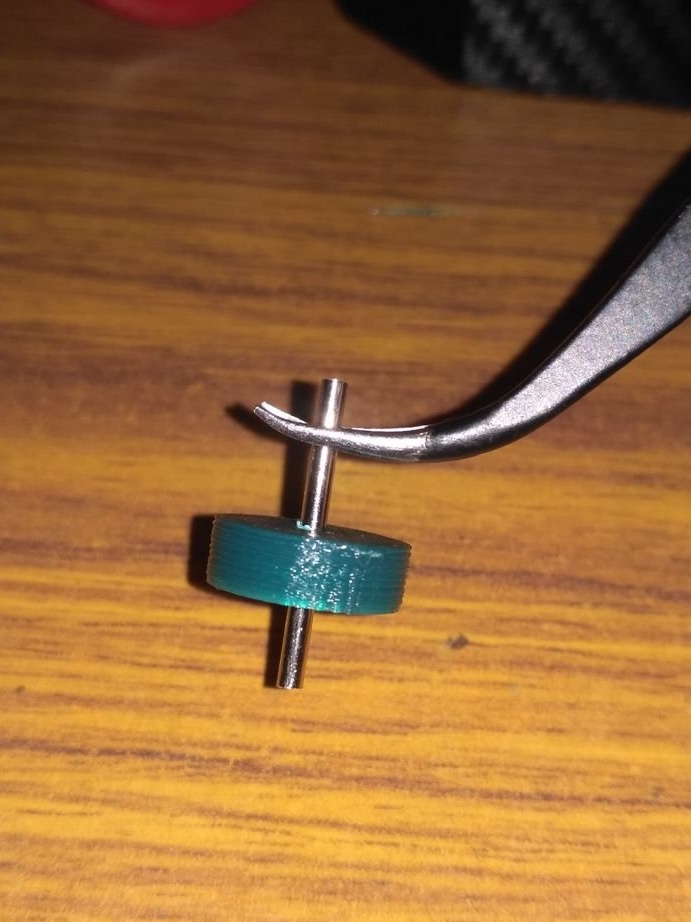
Nach dem Schema montiert der Encoder. Fügt die Stahlachse in den Encoder und das Rad ein. Zur Befestigung von Achse und Rad wird Sekundenkleber verwendet. Installiert einen Encoder mit einem Rad im Gehäuse.




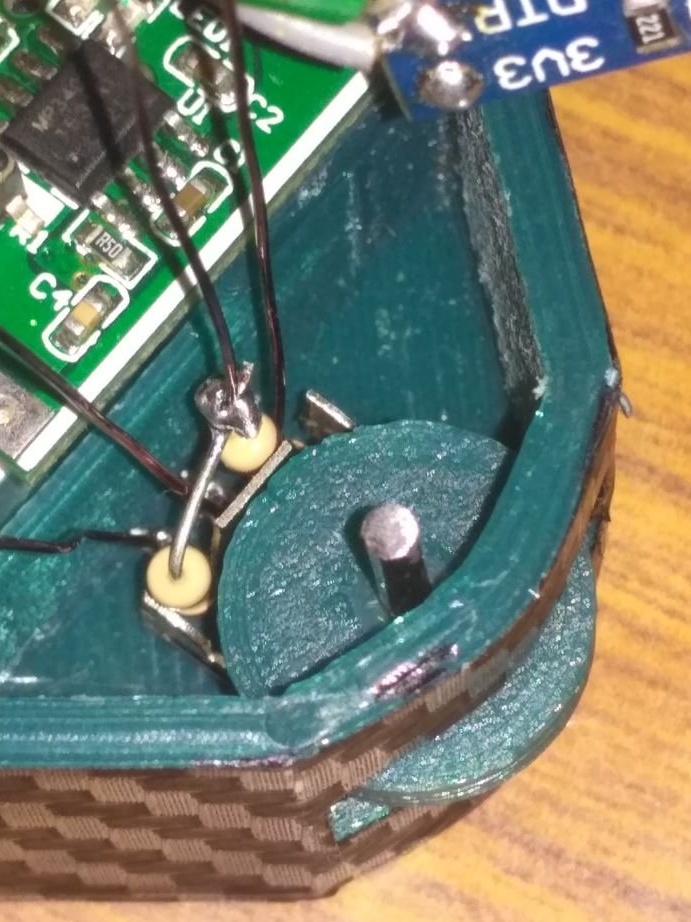
Schritt elf: Installation
Behebt Sensormodule. Entsprechend der Schaltung werden die Drähte montiert. Während der Installation muss sichergestellt werden, dass die Drähte nicht unter das Rad fallen und nicht die Übersicht über den IR-Sensor abdecken.


Schritt 12: Code herunterladen
Lädt Code und Bibliotheken.
final_code.ino
Adafruit_SSD1306-master.zip
Adafruit-GFX-Library-master.zip
SharpIR-master.zip

Schritt 13: Kalibrierung
Zunächst wird das Gyroskop kalibriert. Da das Beschleunigungsmesser- / Gyroskopmodul MPU6050 einfach auf den Körper geklebt wird, ist es möglicherweise nicht vollständig flach. Um diesen Fehler zu beheben, werden daher die folgenden Schritte ausgeführt.
1. Schließen Sie das Gerät an den Computer an und stellen Sie es auf eine ebene Fläche.
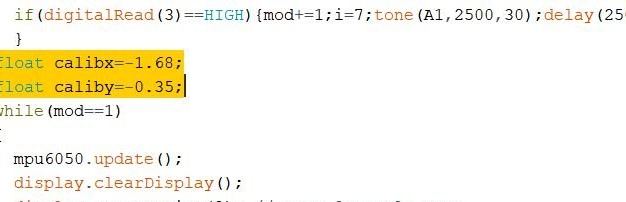
2. Wechseln Sie am Gerät in den LEVEL-Modus, indem Sie die Taste „M“ berühren, und notieren Sie sich die X- und Y-Werte.
3: Weisen Sie diese Werte den Variablen "calibx" und "caliby" im Code zu.
4: Laden Sie das Programm erneut herunter.



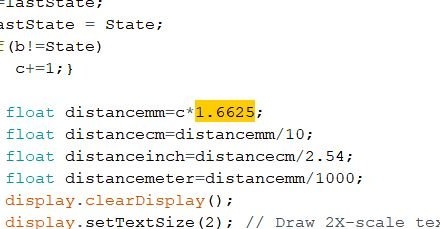
Berechnet nun die Abstände pro Radumdrehung.
Die Anzahl der Schritte pro Umdrehung der Geberwelle, N = 24 Schritte
Raddurchmesser, D = 12,7 mm
Radumfang, C = 2 · pi · (D / 2) = 2 · 3,14 · 6,35 = 39,898 mm
Daher ist die pro Schritt zurückgelegte Strecke = C / N = 39,898 / 24 = 1,6625 mm.
Schritt vierzehn: Testen
Vor dem Anbringen des Gehäusedeckels werden Sensoren, Lademodul, Tasten und Display getestet.



Schritt 15: Knopf- und Gehäusebaugruppe
Der Netzschalter auf der Ladekarte ist kurz und der Master, der die Beine abschneidet, setzt eine zusätzliche LED, die den Knopf drückt.



Klebt zwei Körperhälften.





Schritt 16: Markieren der Tasten
Die Buchstaben wurden auf einem Laserschneider geschnitten und dann auf den Körper geklebt.




Alles ist fertig, es bleibt nur das Gerät in Betrieb zu testen.