

Zuvor arbeitete der Vorarbeiter daran, sein Fahrrad mit einem Gleichstrommotor für einen automatischen Türmechanismus in ein elektrisches umzuwandeln. Er schuf auch eine Batterie für 84 V DC.
Jetzt braucht er einen Drehzahlregler, der die Energiemenge begrenzen kann, die der Batterie von der Batterie zugeführt wird. Die meisten im Netzwerk verfügbaren Geschwindigkeitsregler sind nicht für eine derart hohe Spannung ausgelegt, daher wurde beschlossen, dies selbst zu tun.
In diesem Projekt wird ein einzelner PWM-Drehzahlregler entwickelt und gebaut, um die Drehzahl großer Gleichstrommotoren zu steuern.
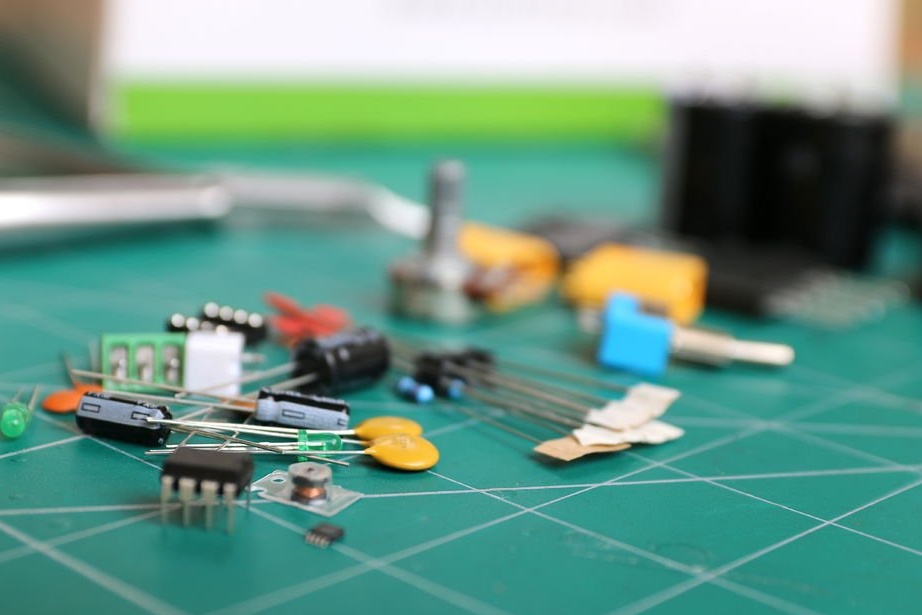
Schritt 1: Werkzeuge und Materialien




Für dieses Projekt benötigen Sie grundlegende Lötwerkzeuge wie:
- Lötkolben;
- Lötsauger;
- Zangen;
Schema, Gerber-Dateien und eine Liste der Komponenten sind verfügbar.
Schritt 2: Entwerfen Sie einen Geschwindigkeitsregler
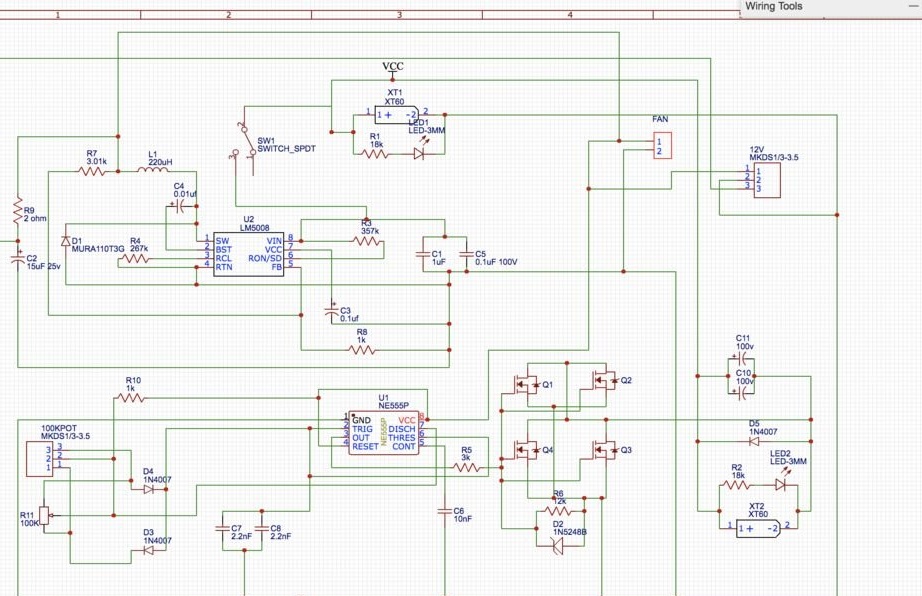
Da wir uns bemühen, die Drehzahl des Gleichstrommotors zu steuern, können wir zwei Technologien verwenden. Der Abwärtswandler, der die Eingangsspannung senkt, ist ziemlich kompliziert, daher wurde entschieden, PWM-Steuerung (Pulsweitenmodulation) zu verwenden. Der Ansatz ist einfach, um die Geschwindigkeit der Batterieleistung zu steuern, er schaltet sich mit hoher Frequenz ein und aus. Um die Geschwindigkeit des Fahrrads zu ändern, wird das Tastverhältnis oder der Zeitraum zum Ausschalten der Steuerung geändert.
Mechanische Schalter sollten zu diesem Zeitpunkt nicht dieser hohen Spannung ausgesetzt sein, daher ist der Mosfet-N-Kanal, der speziell für die Behandlung einer moderaten Strommenge bei hohen Frequenzen ausgelegt ist, eine geeignete Wahl.
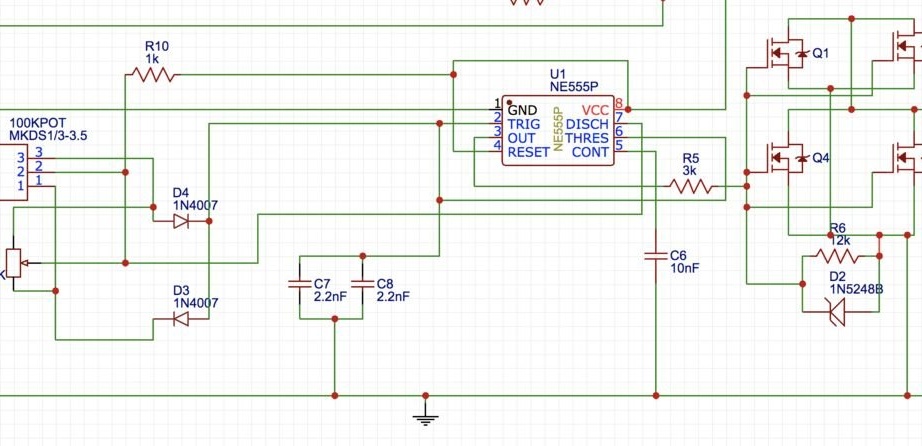
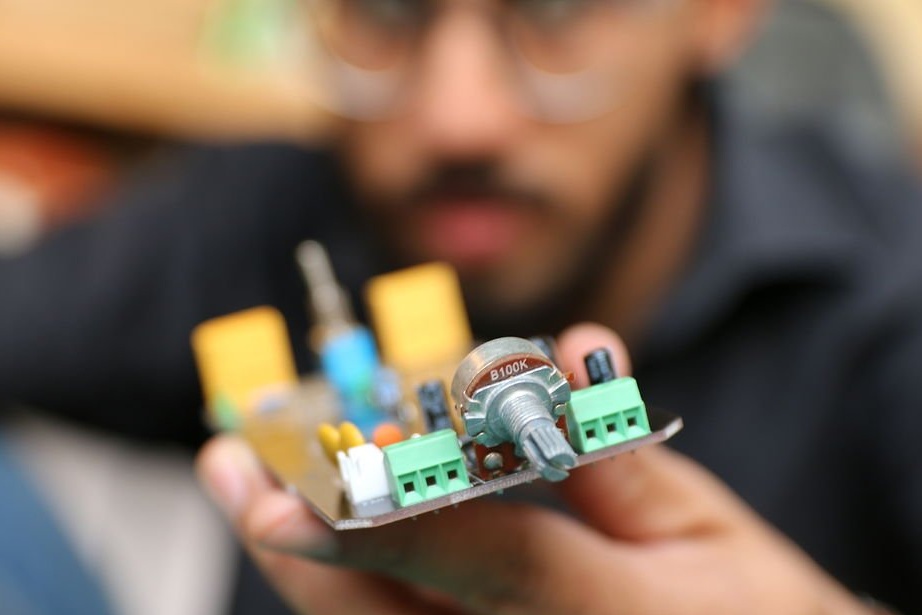
Zum Schalten der Halbkugeln ist ein PWM-Signal erforderlich, das vom IC-Zeitgeber 555 erzeugt wird, und das Tastverhältnis des Schaltsignals wird unter Verwendung eines 100 kΩ-Potentiometers geändert.
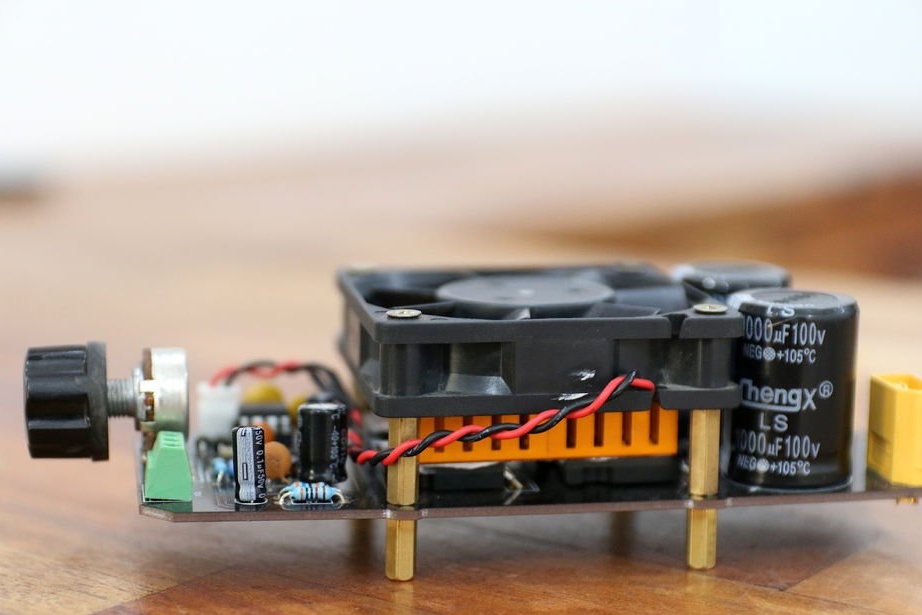
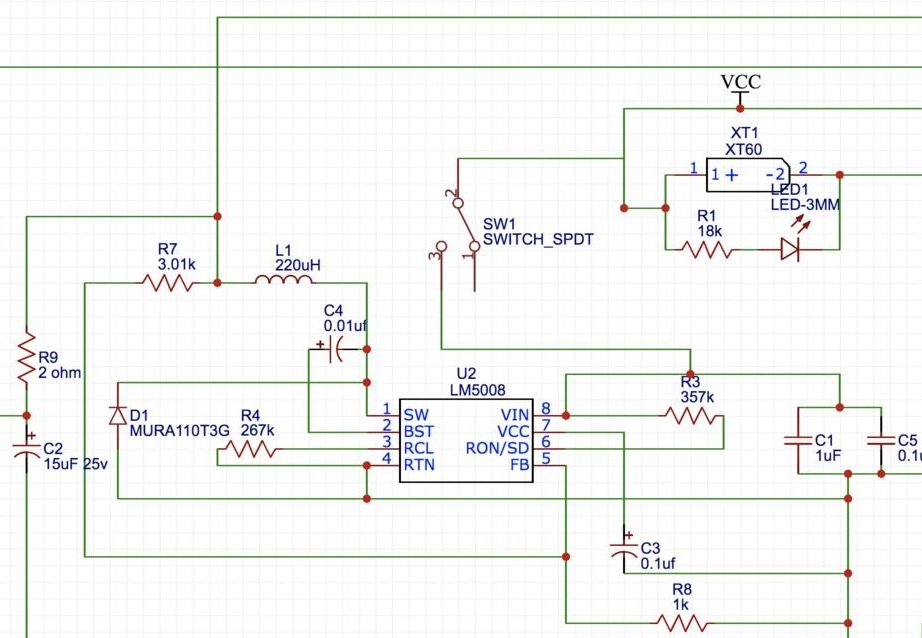
Da wir nicht mit einem 555-Timer über 15 V arbeiten können, müssen wir den integrierten Schaltkreis des lm5008-Wandlers einschalten, der die Eingangsspannung von 84 V auf 10 V DC senkt, mit der der Timer und der Lüfter mit Strom versorgt werden.
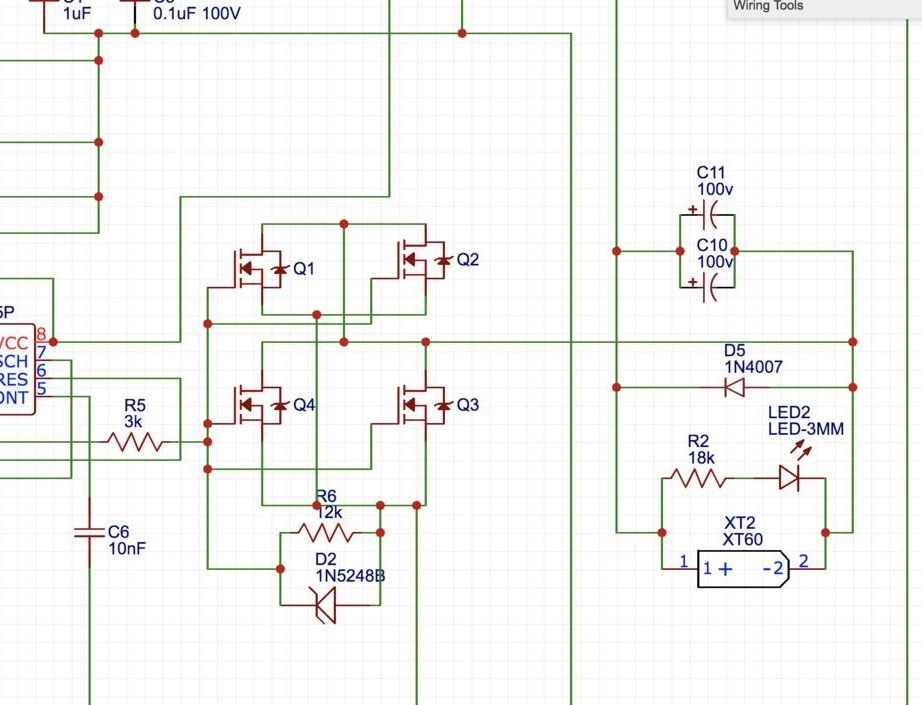
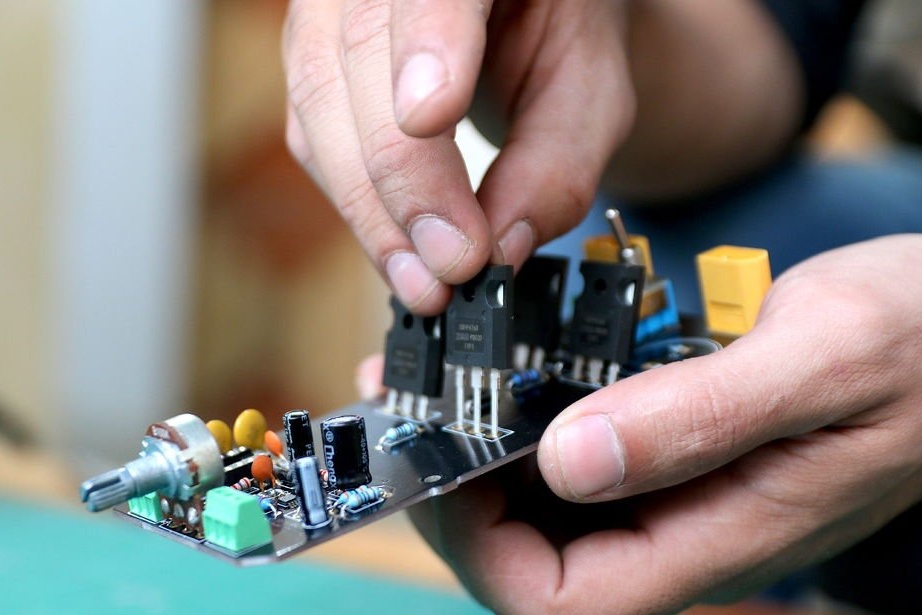
Zur Verarbeitung einer großen Strommenge wurden vier N-Kanal-Mosfets verwendet, die parallel geschaltet sind.
Zusätzlich wurden alle zusätzlichen Komponenten wie in den Datentabellen beschrieben hinzugefügt.
Schritt 3: Entwerfen Sie Leiterplatten
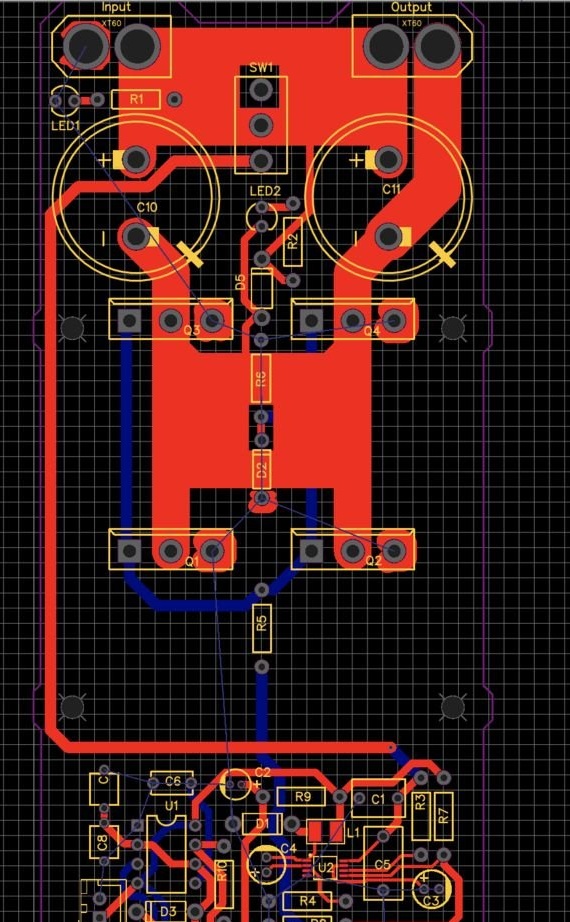
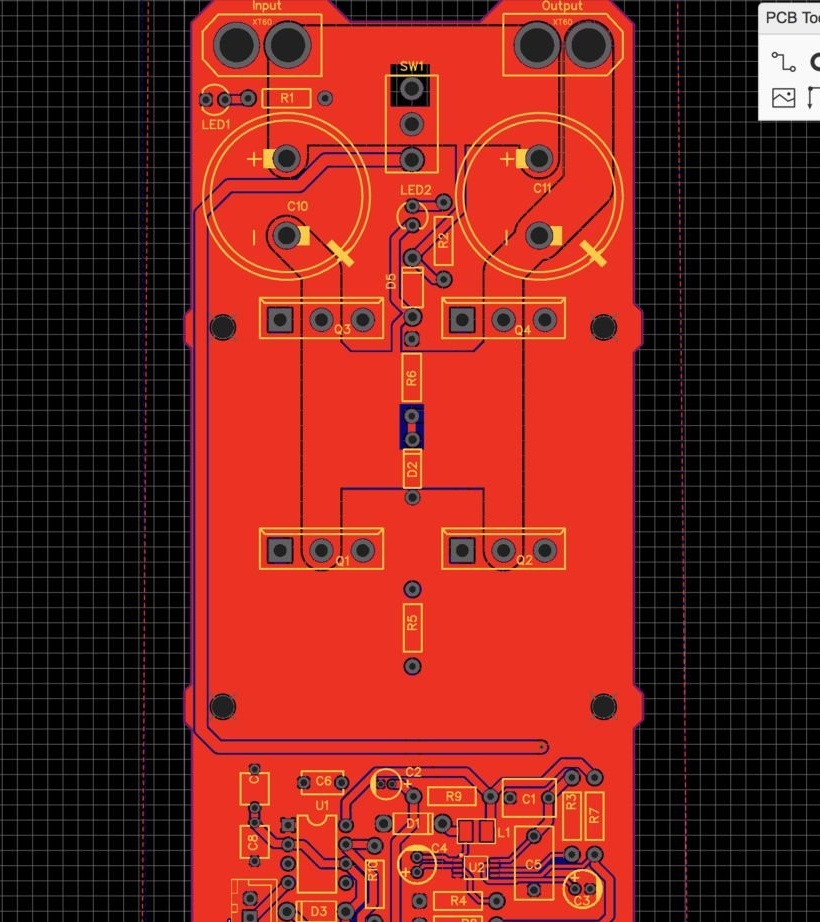
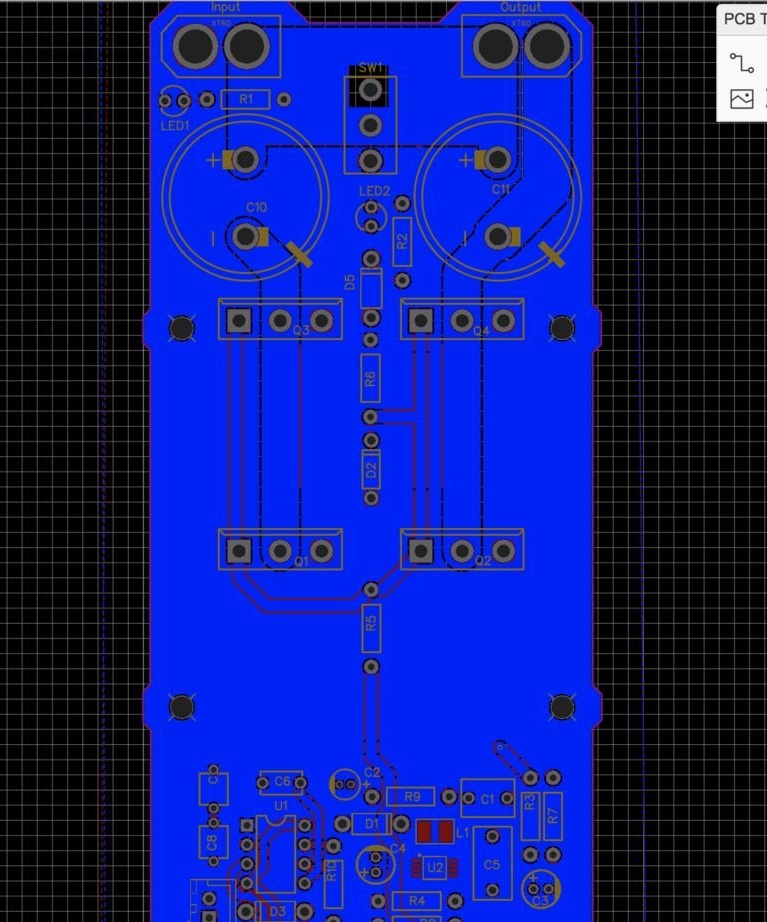
Nach Beendigung der Schaltung wurde beschlossen, eine spezielle Leiterplatte für den Drehzahlregler zu entwickeln. Es wurde beschlossen, dieses Gerät so zu gestalten, dass es für andere DIY-Projekte des Masters, die große Gleichstrommotoren verwenden, weiter modifiziert werden kann.
Die Idee, eine Leiterplatte zu entwerfen, erfordert zwar viel Aufwand, lohnt sich aber. Versuchen Sie andererseits immer, bestimmte Module auf der Platine zu entwerfen. Solche Module umfassen Steuerschaltungen und Leistung. Dies geschieht, damit Sie beim Anschließen alles die entsprechende Breite der Druckspur auswählen können, insbesondere auf der Angebotsseite.
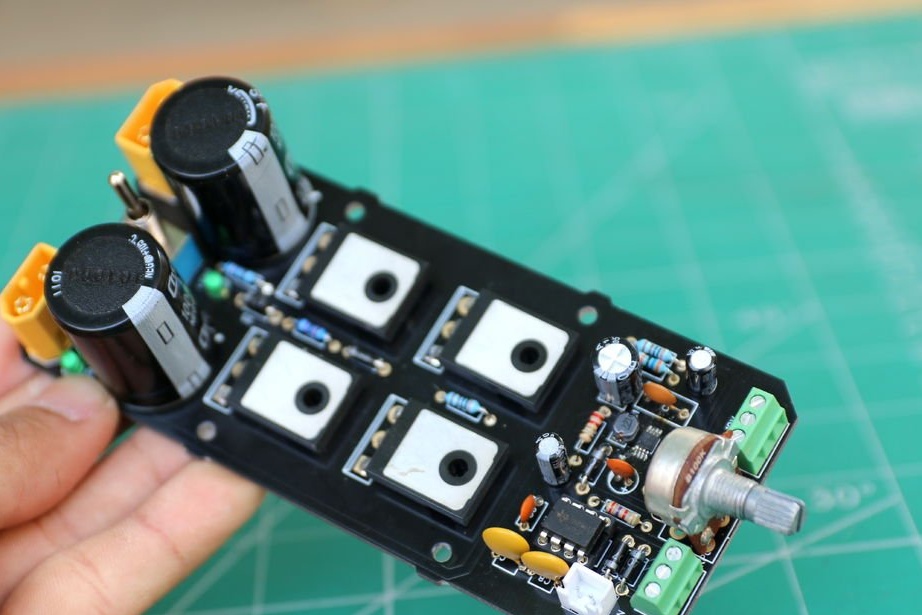
Außerdem wurden vier Befestigungslöcher hinzugefügt, die für die Montage des Controllers und das Zusammenhalten des Lüfters mit dem Kühlkörper über den MOSFETs nützlich sind.
Schritt 4: Bestellen Sie Leiterplatten
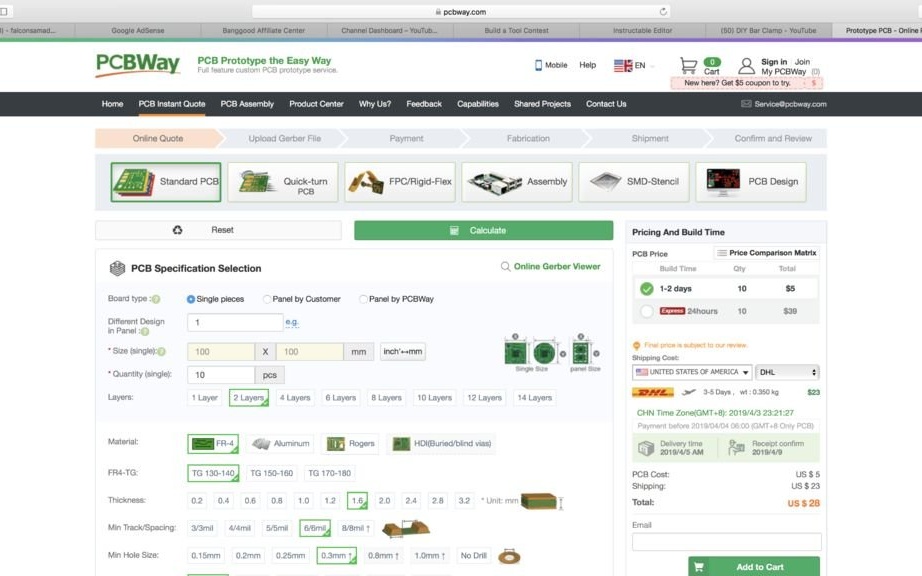

Im Gegensatz zu anderen kundenspezifischen Teilen für ein DIY-Projekt sind Leiterplatten bei weitem die leichtesten. Sobald die Gerber-Dateien für das endgültige Layout der Leiterplatte fertig waren, waren nur noch wenige Klicks erforderlich, um spezielle Leiterplatten zu bestellen.
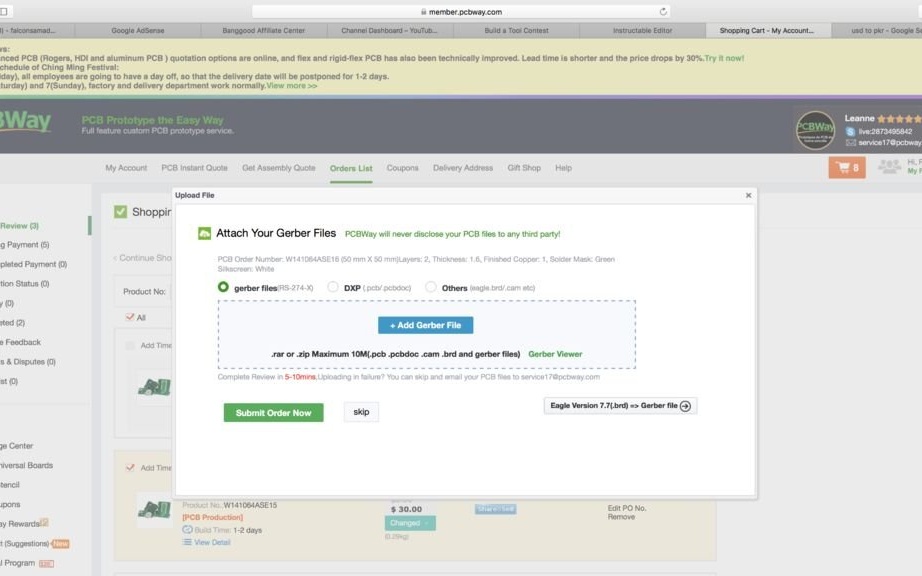
Der Assistent dieses Projekts ging lediglich zu PCBWAY und lud seine Gerber-Dateien hoch. Nachdem das technische Team das Design auf Fehler überprüft hat, wird das Design an die Produktionslinie gesendet. Der gesamte Vorgang dauert zwei Tage und die Leiterplatten erreichen innerhalb einer Woche die angegebene Adresse.
Gerber-Dateien, Schaltplan und Spezifikation für die Drehzahlreglerplatine sind verfügbar.
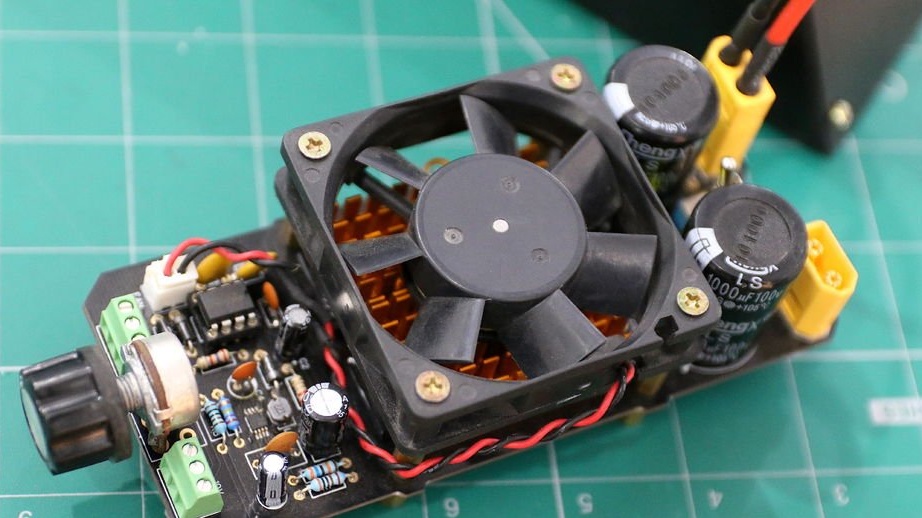
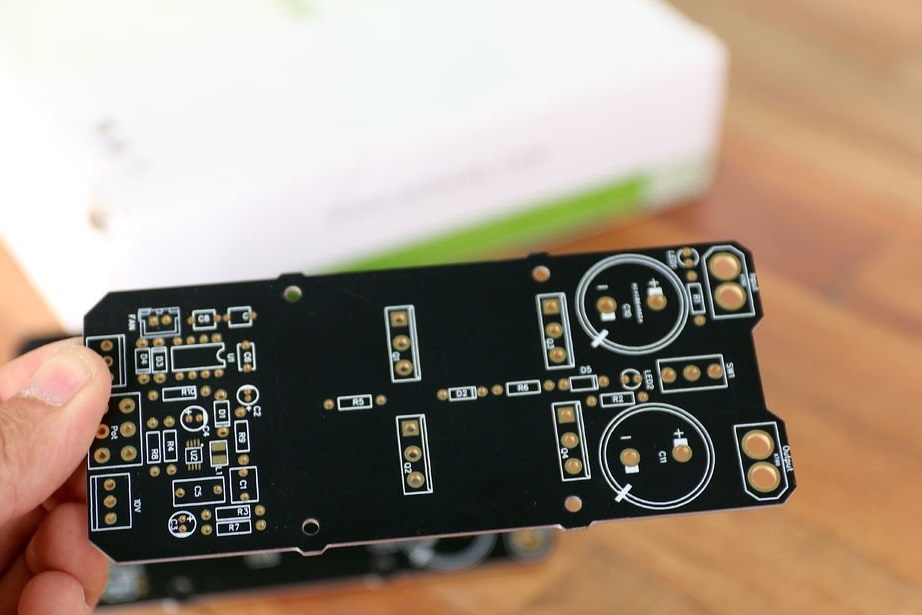
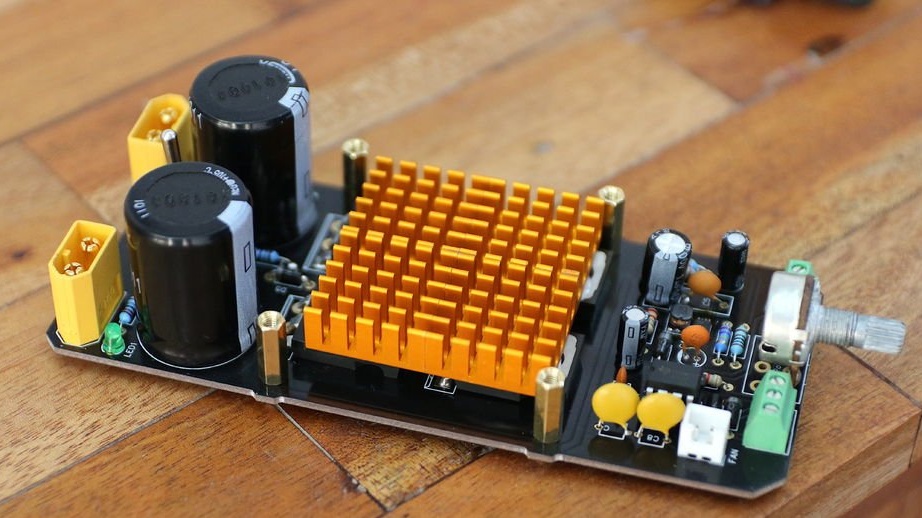
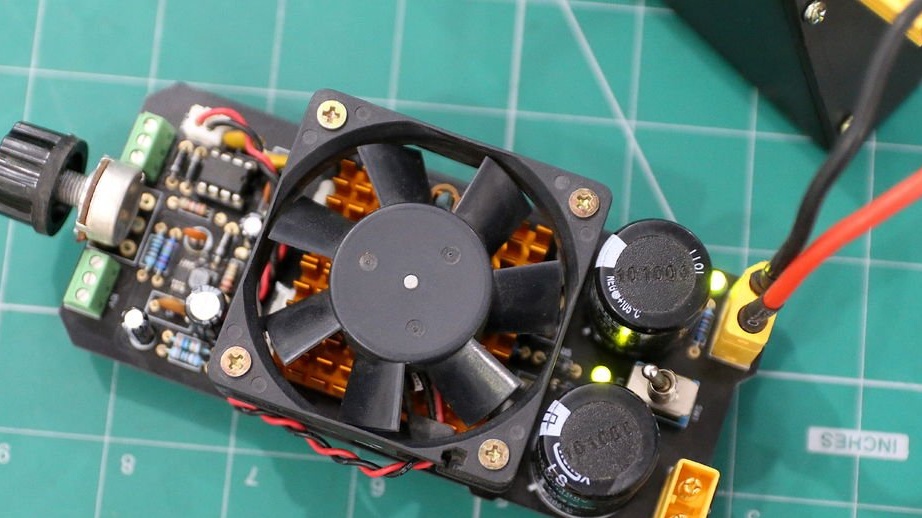
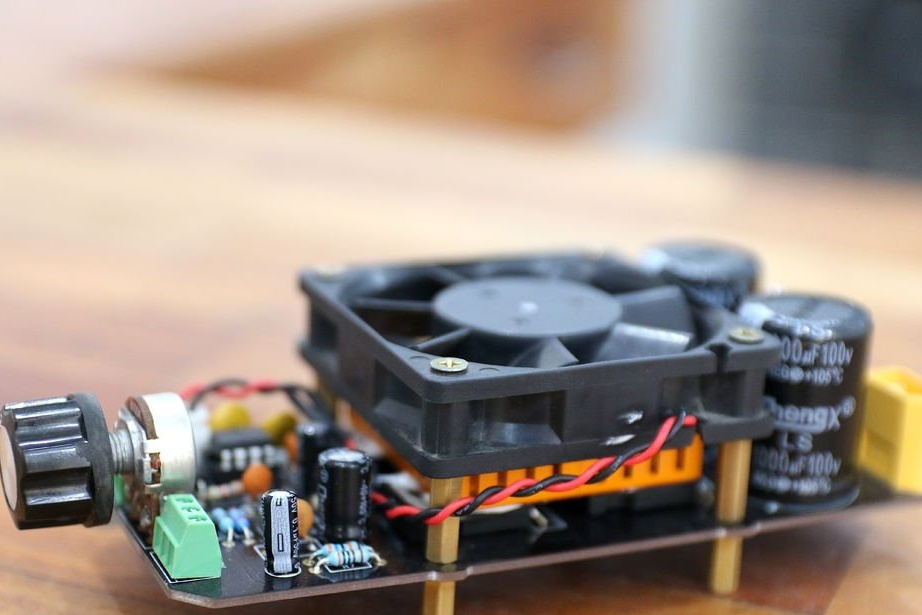
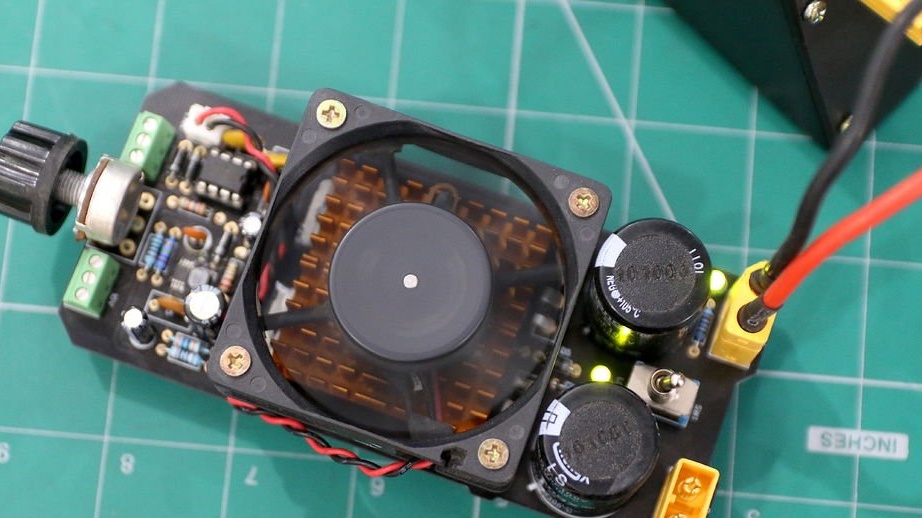
Schritt 5: Leiterplatten zusammenbauen
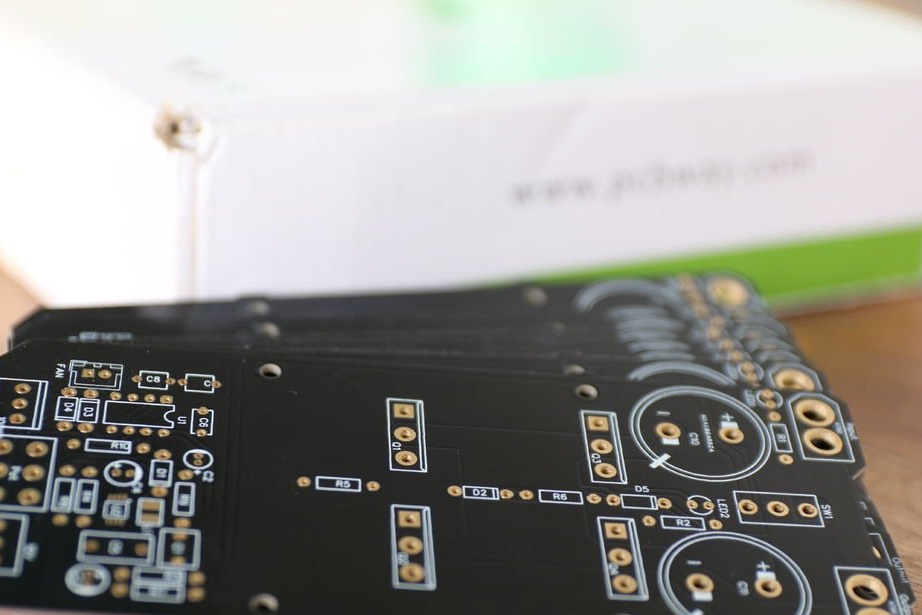
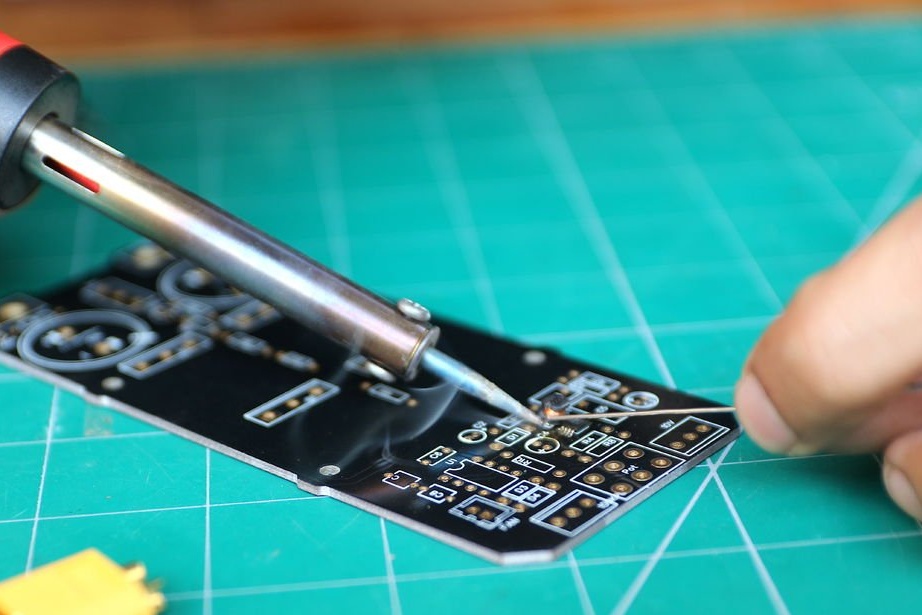
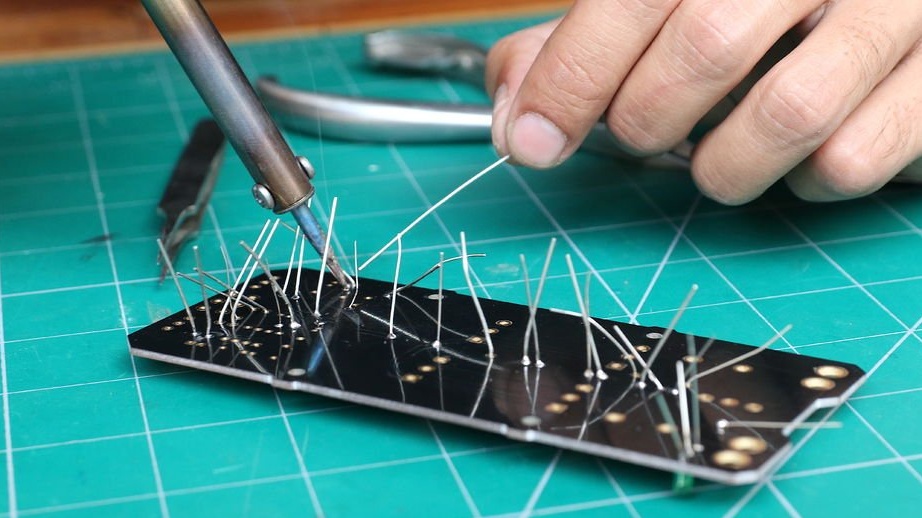

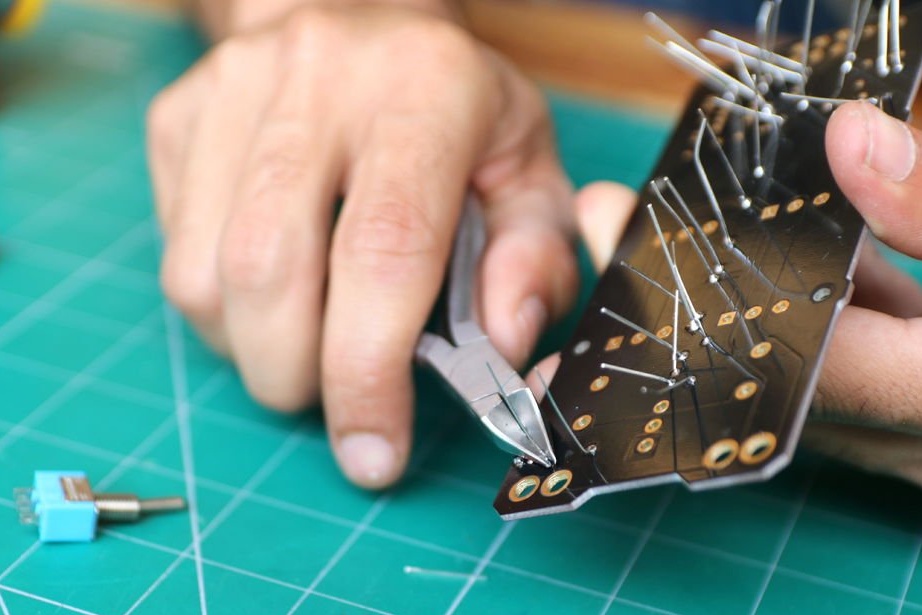
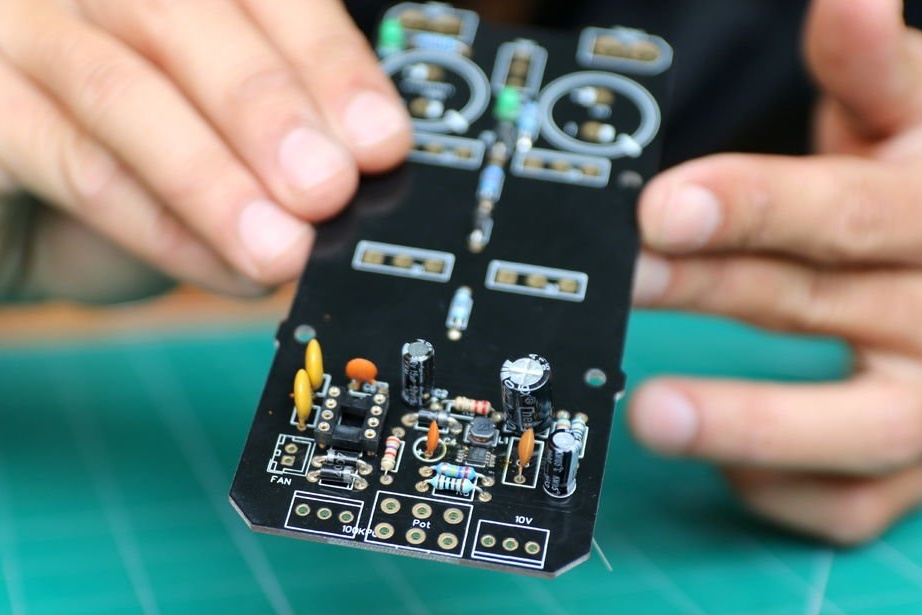

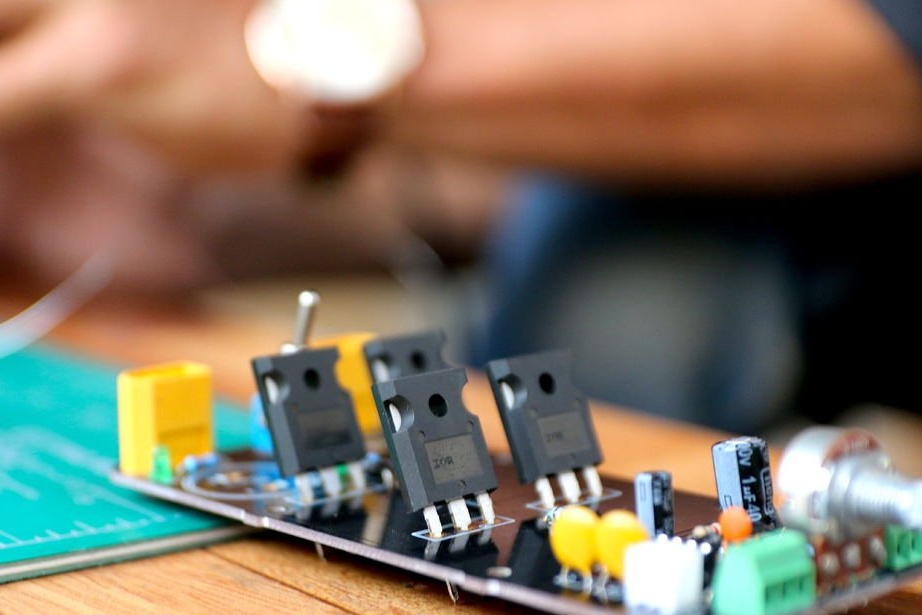


Wie erwartet kamen die Leiterplatten innerhalb einer Woche an. Die Qualität der Leiterplatten ist absolut einwandfrei. Es ist Zeit, alle Komponenten wie in der Spezifikation angegeben zusammenzubauen und zu montieren.
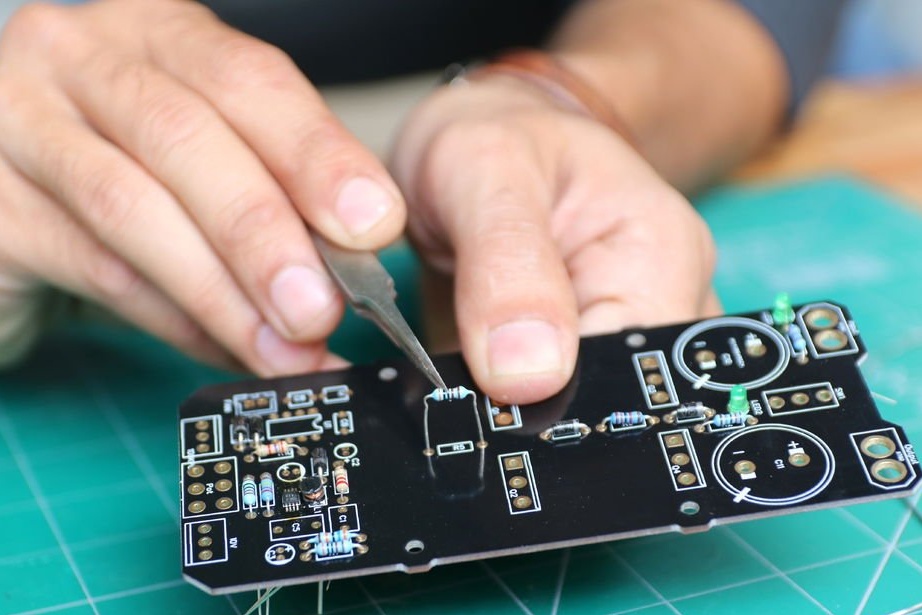
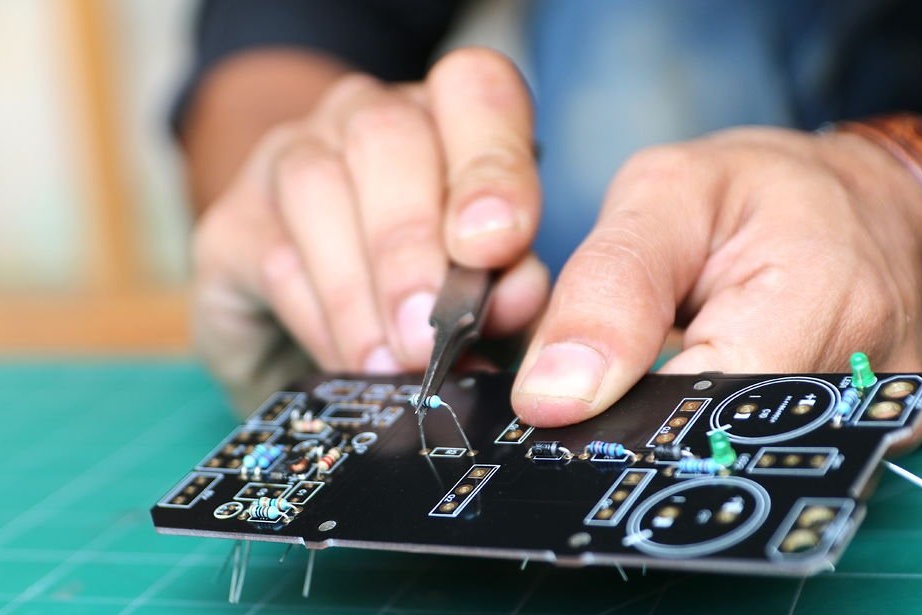
Damit alles reibungslos verläuft, müssen Sie mit der kleinsten Komponente auf der Leiterplatte beginnen, in unserem Fall mit dem Buck-Wandler LM5008, der SMP-Komponente. Sobald die Komponenten gemäß dem Diagramm verlötet waren, begann der Master mit größeren Komponenten zu arbeiten.
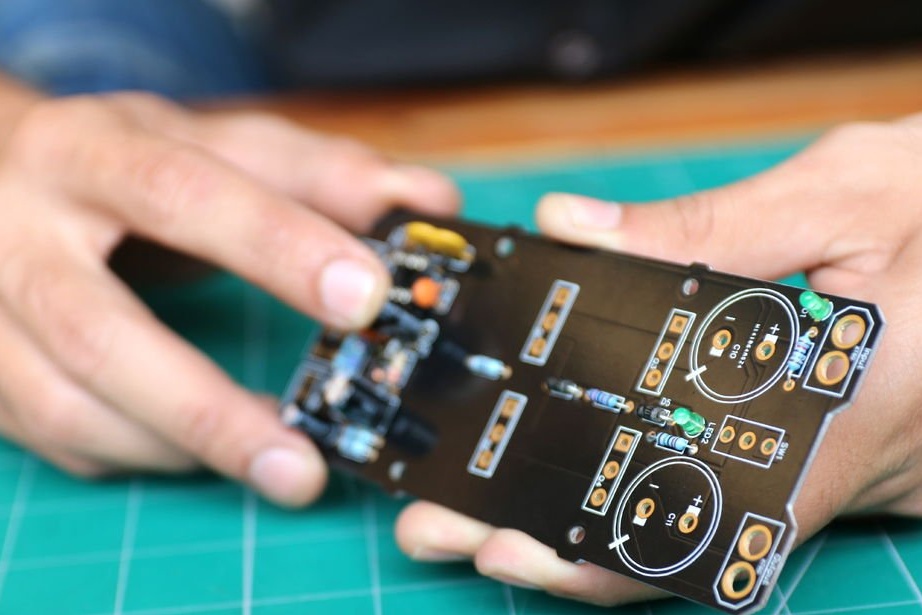
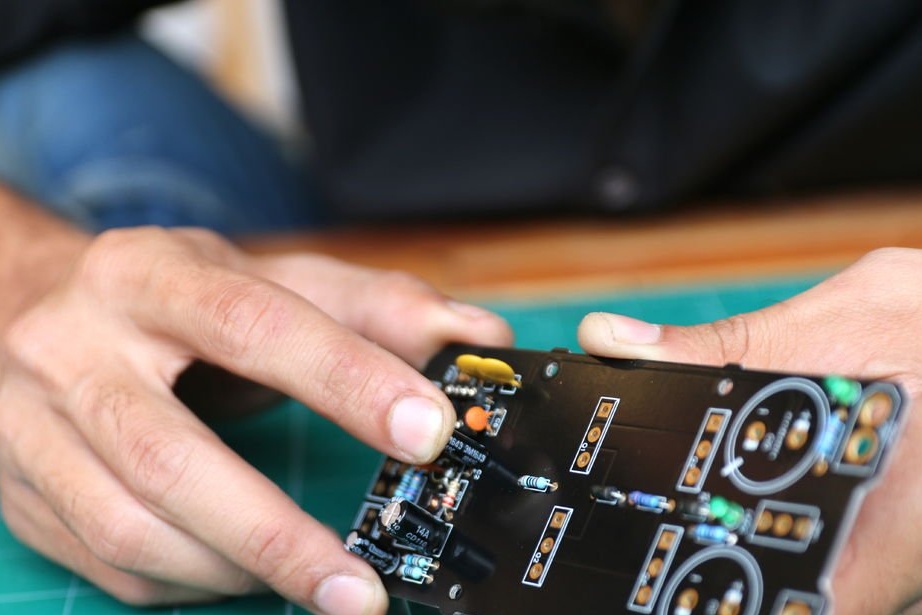
Nach dem Zusammenbau der Platine ist es Zeit, den 555-Timer mit einer Kerbe in die richtige Richtung einzustellen.
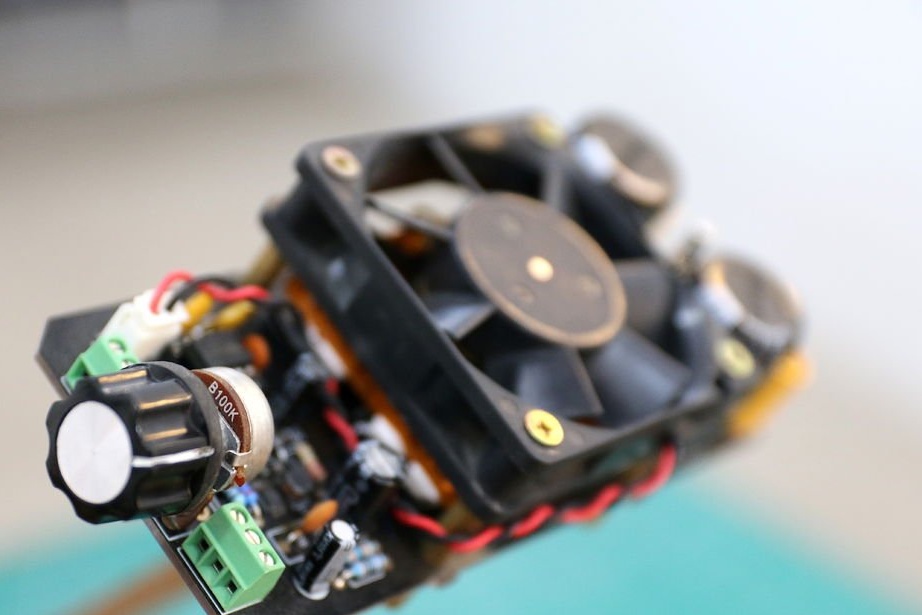
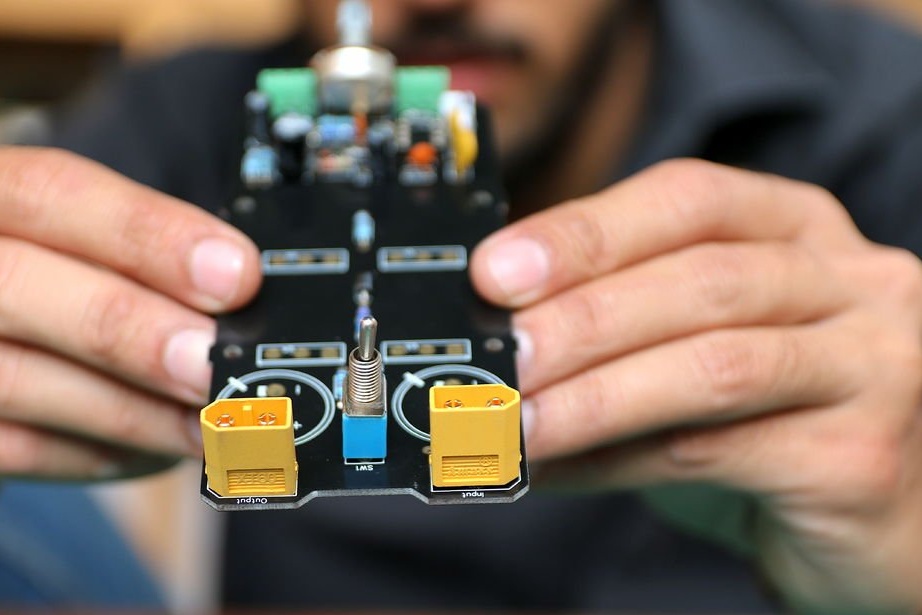
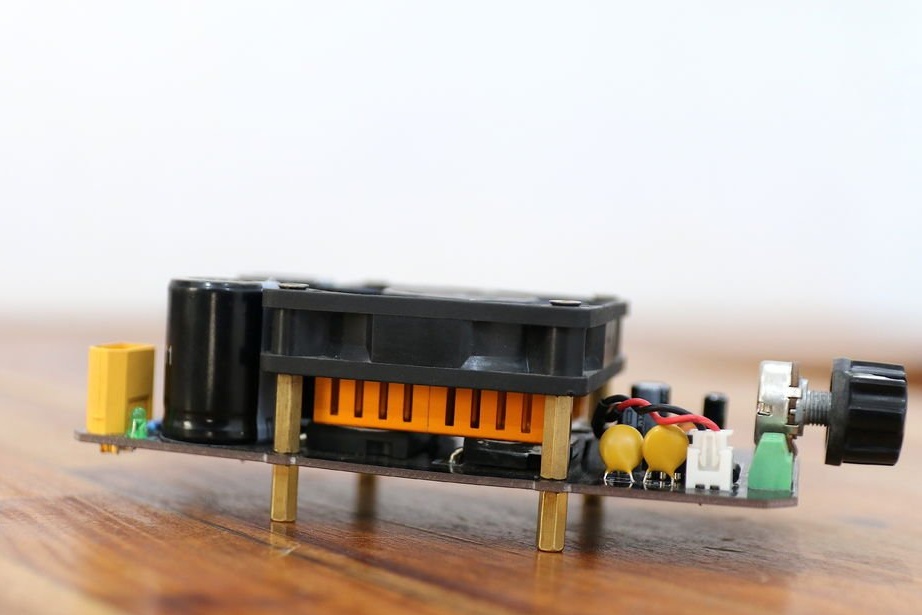
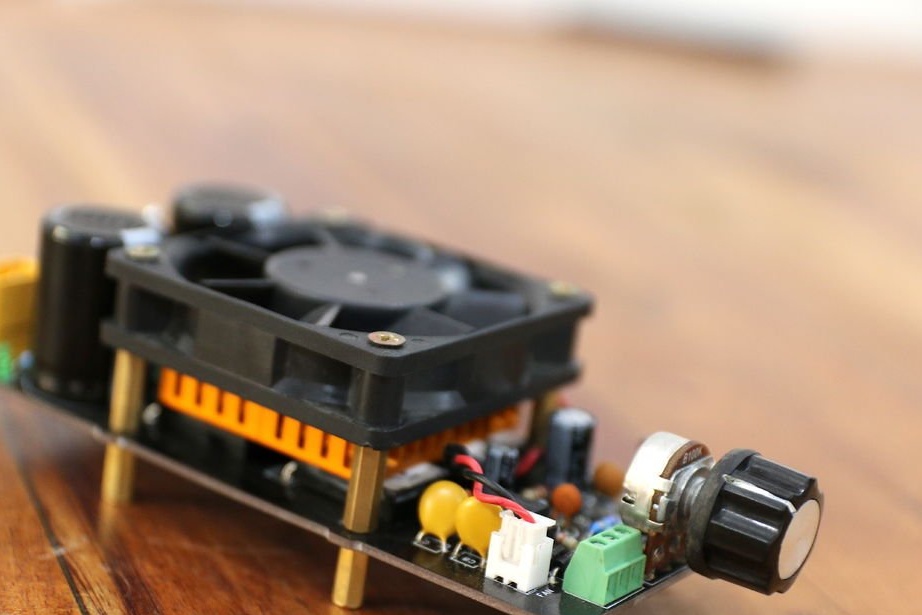
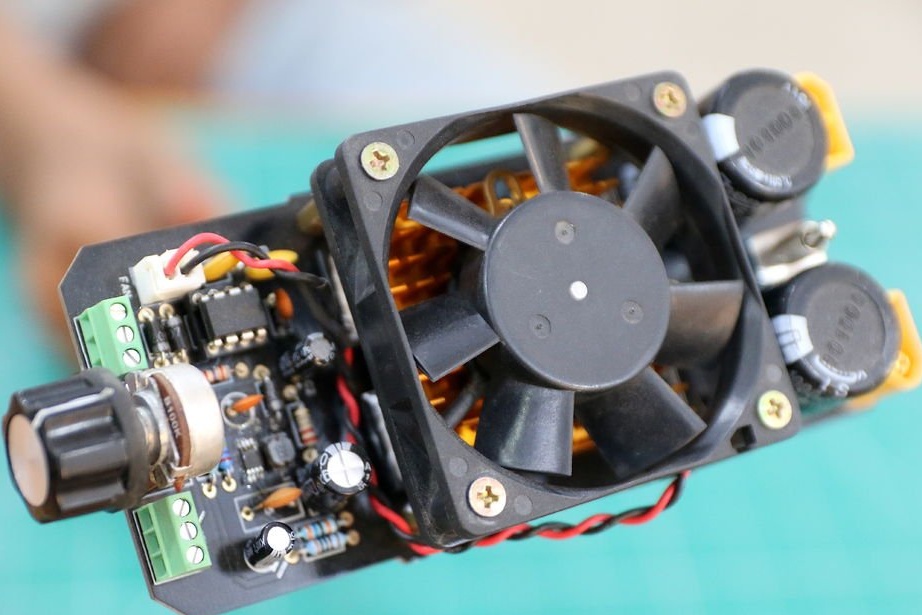
Schritt 6: Abkühlen
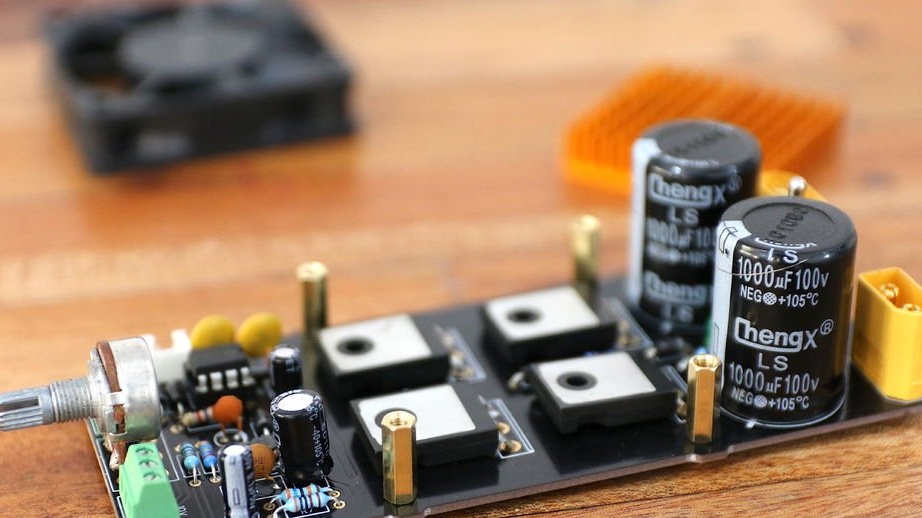
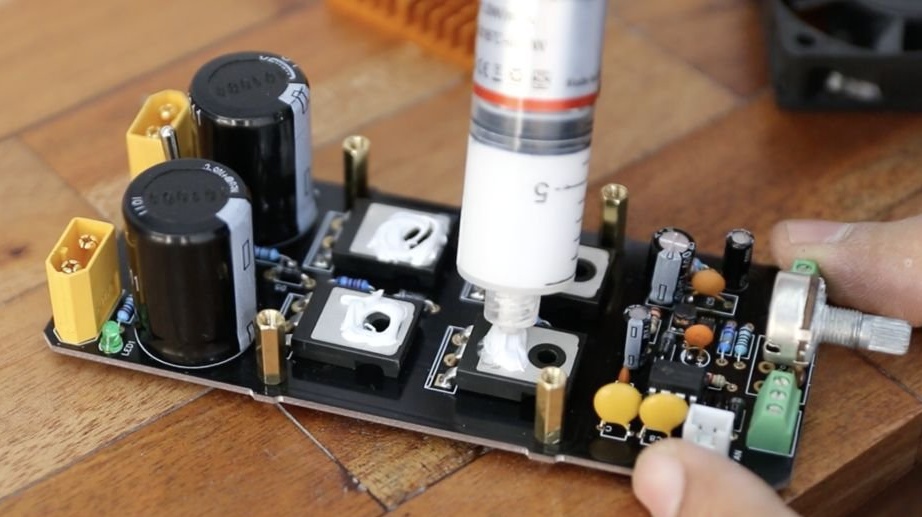
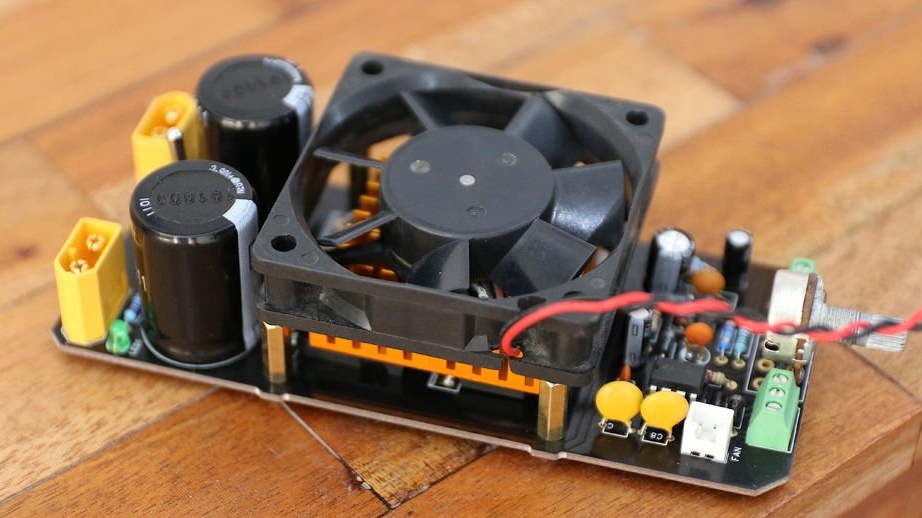
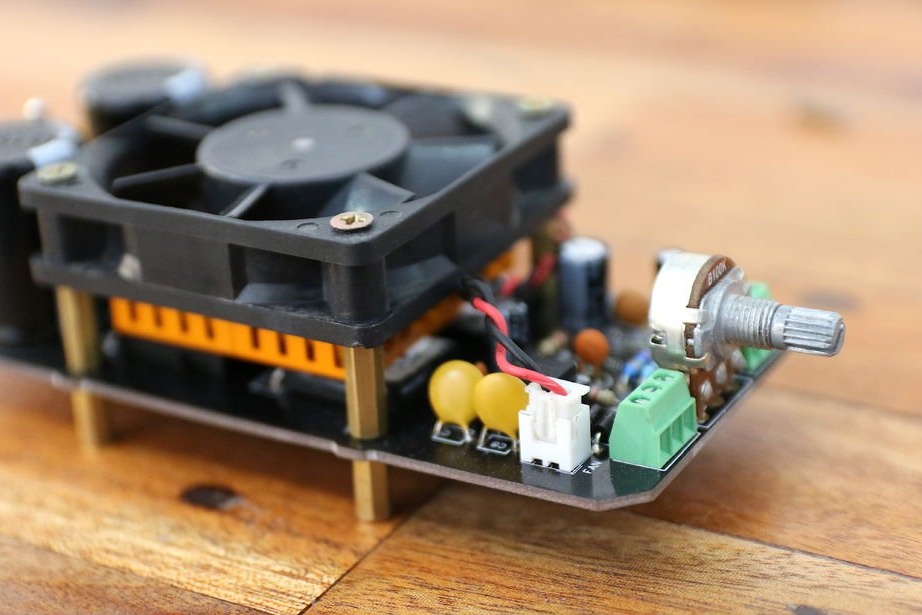
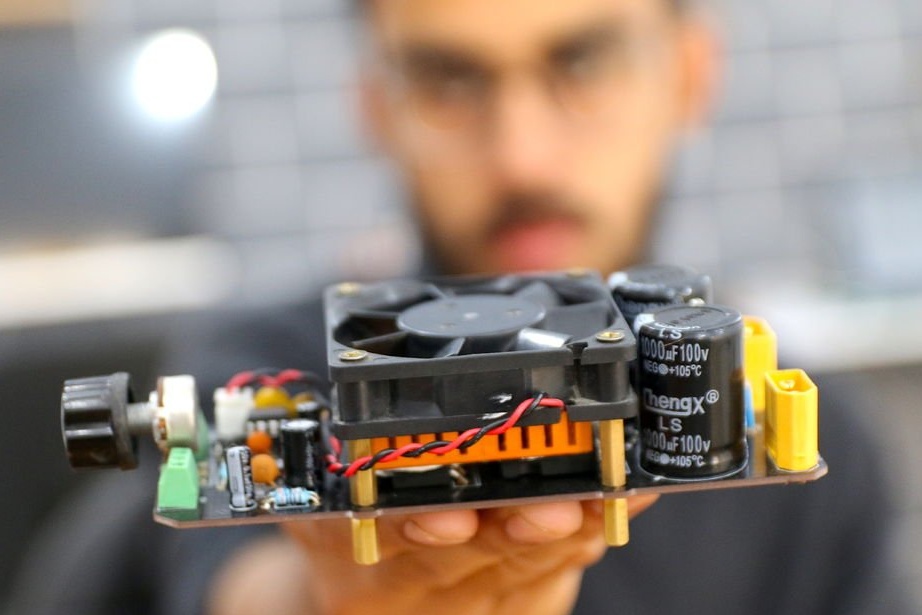
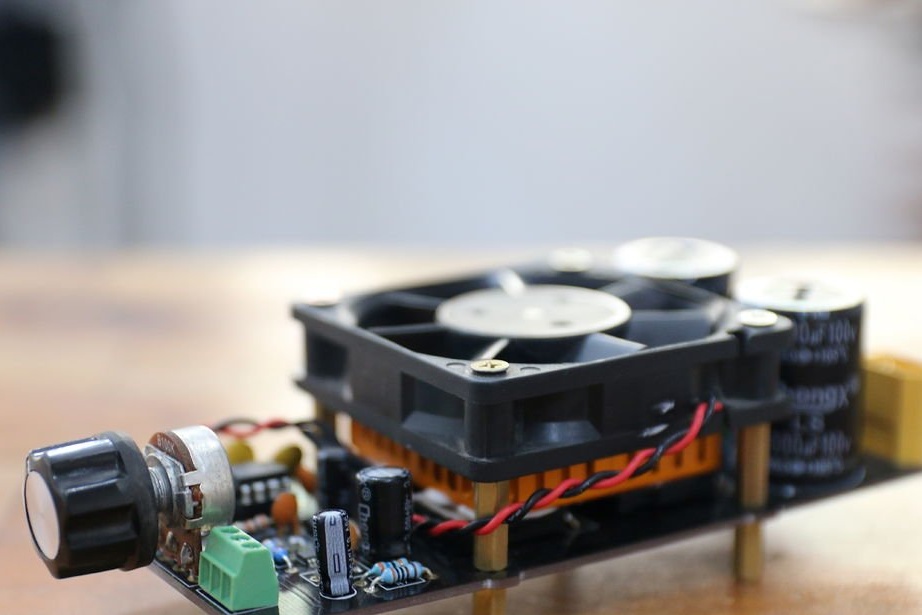
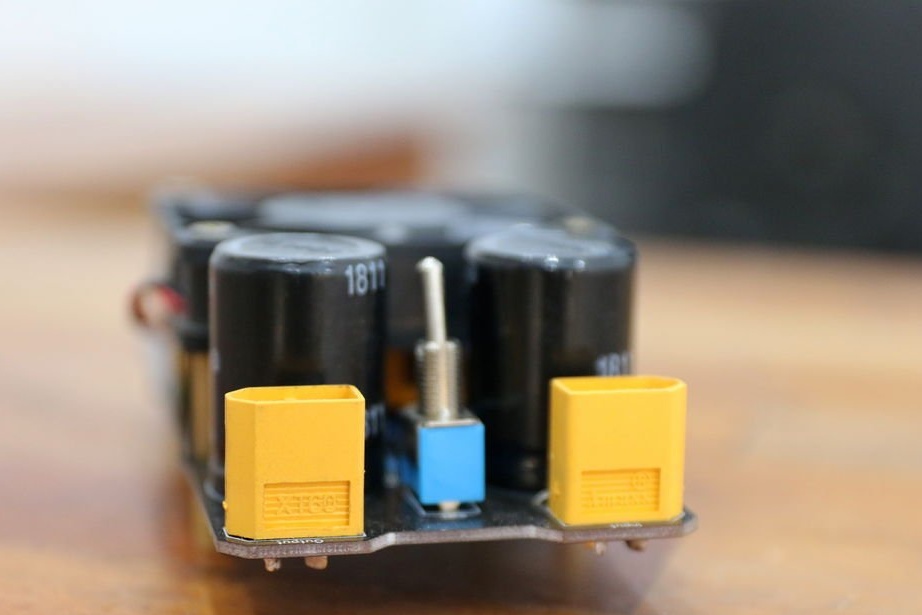
Bei so viel Energie ist es offensichtlich, dass sich das Board erwärmt. Um mit überschüssiger Wärme fertig zu werden, müssen daher MOSFETs gebogen und ein 12-V-Lüfter mit einem Schalter zwischen den Heizkörpern installiert werden.
Danach ist der PWM-Drehzahlregler betriebsbereit.
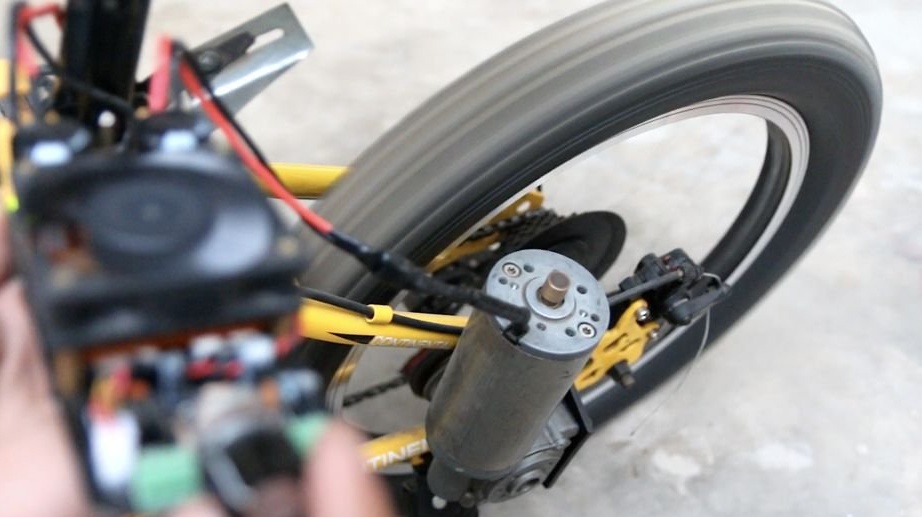
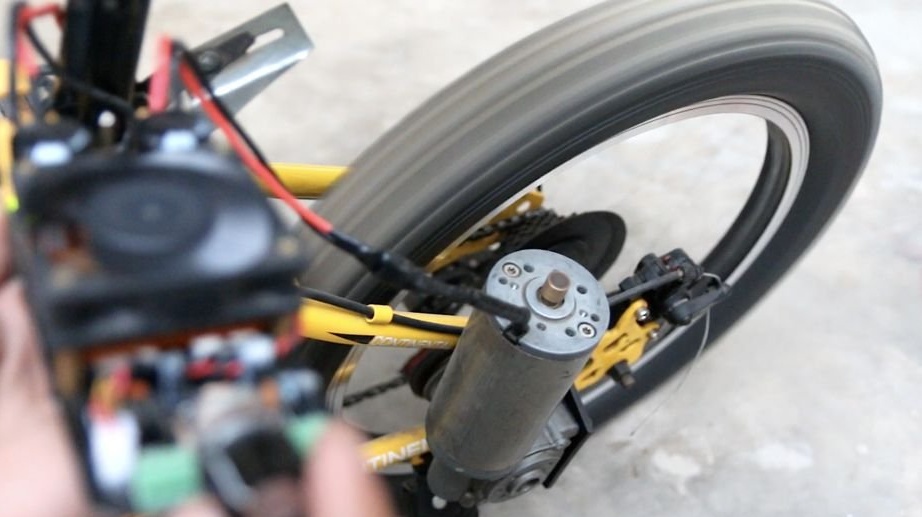
Schritt 7: Testen der Steuerung

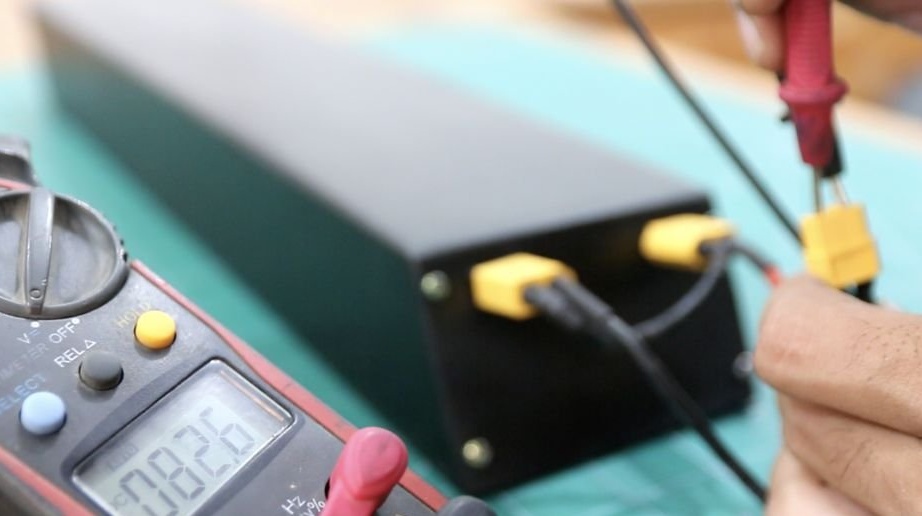
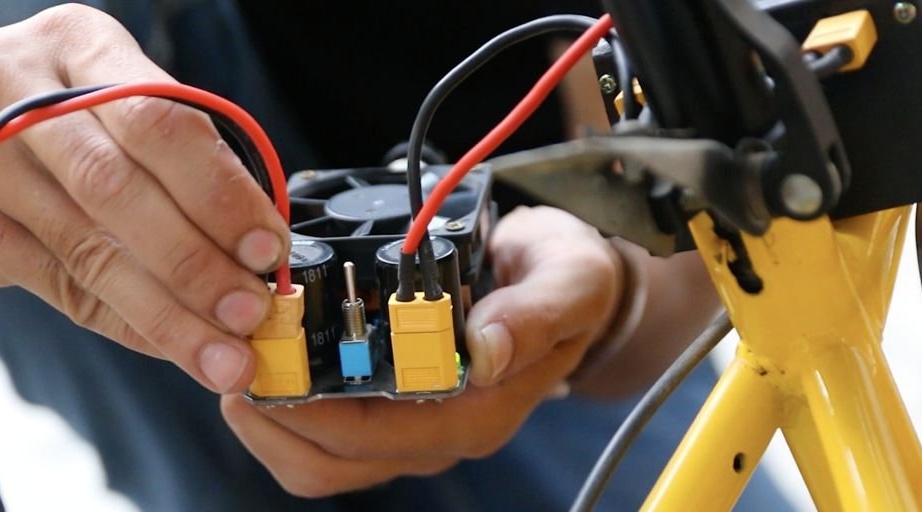
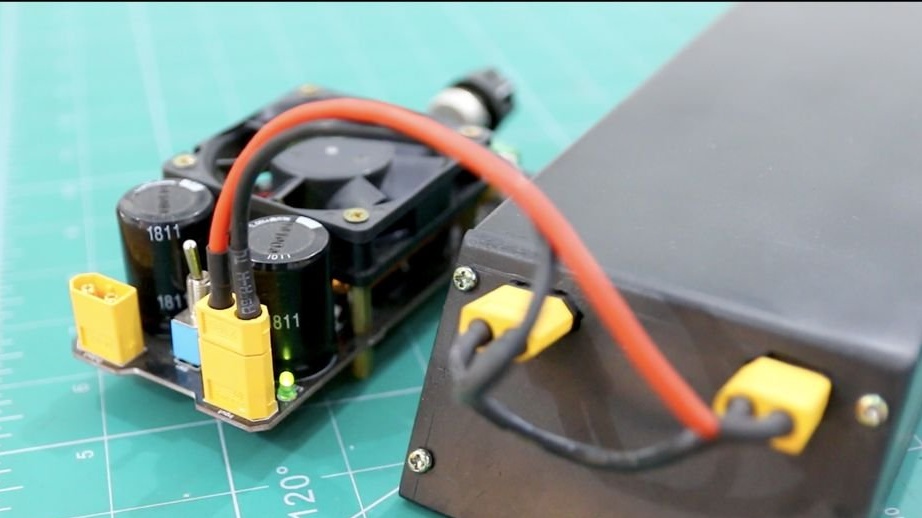

Zum Testen des Controllers wird eine 84-V-Batterie für ein Elektrofahrrad verwendet, die zuvor vom Master hergestellt wurde. Die Steuerung ist vorübergehend mit der Batterie und dem Motor verbunden, an den sie angeschlossen ist Fahrrad das Hinterrad anzutreiben.
Nach dem Umschalten des Schalters schaltet sich die Steuerung ein und der Lüfter bläst Luft durch die MOSFETs. Wenn sich das Potentiometer im Uhrzeigersinn dreht, beginnt sich der Motor zu drehen und erhöht die Drehzahl proportional zur Drehung des Griffs allmählich.
Schritt 8: Endergebnisse

Der Geschwindigkeitsregler ist bereit und hat alle Erwartungen des Masters in Bezug auf seine Fähigkeiten übertroffen. Die Steuerung arbeitet problemlos mit einer 84-V-Batterie und regelt die Motordrehzahl reibungslos.
Um diesen Geschwindigkeitsregler unter Last zu testen, muss der Master sein Fahrradprojekt abschließen und alle Komponenten zusammen montieren.
Sie können sich auch ein Video zur Montage dieses Controllers ansehen: