
Guten Tag an alle lieben Freunde! Im heutigen Artikel möchte ich Ihnen eine ziemlich interessante Idee zeigen hausgemacht, was fast jeder tun kann, der zumindest ein wenig getan hat Handarbeiten und wer weiß ein wenig über Arduino.
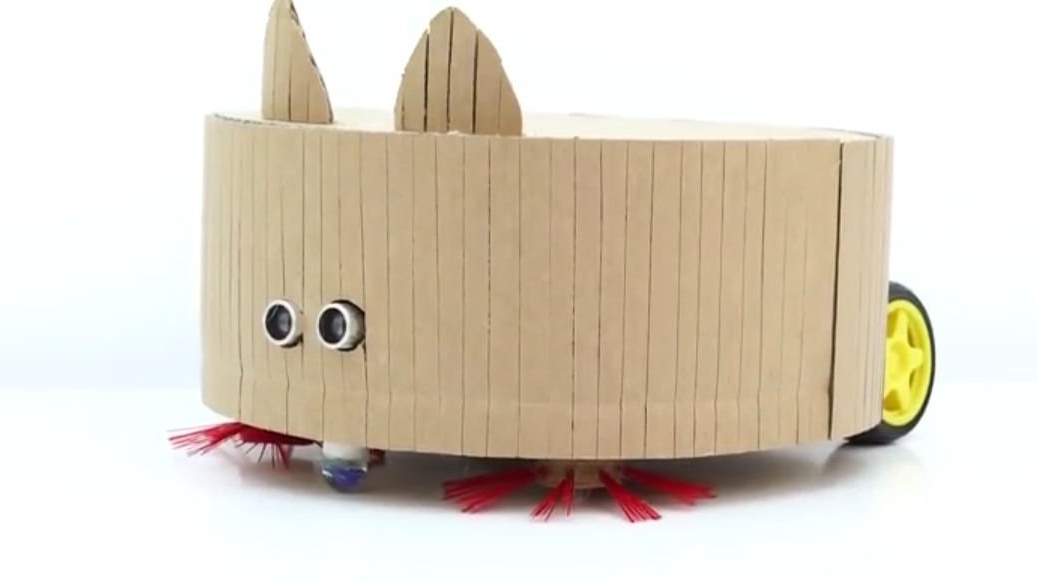
Im Allgemeinen werden wir heute einfach machen Roboter Kartonstaubsauger mit seinen eigenen Händen. Aber du sagst es mir, weil ich dir bereits gesagt habe, wie man einen Roboterreiniger selbst herstellt, und du wirst Recht haben, aber dieser Roboterstaubsauger ist viel einfacher, billiger und bequemer als der vorherige. Ja und das hier das Modell modifiziert und sieht besser aus, und hat auch volle Automatisierung an Bord. Das hier Handwerk, hilft nicht nur, die Zeit zu vertreiben, sondern wird auch zu einem unverzichtbaren Assistenten in Ihrem Zuhause oder Ihrer Werkstatt. Kurz gesagt, die Sache ist nützlich und nicht kompliziert.
Na dann, genug von dem langen Vorwort, lass uns gehen!
Und so brauchen wir für dieses hausgemachte Produkt:
Wellpappe (viel Pappe)
-
Verbindungsdrähte
-
-
-Räder für Getriebemotoren
-Treiber von Treibern für Arduino (der Autor des hausgemachten Produkts verwendet einen Modelltreiber, den Sie nur in das Arduino einfügen müssen, um eine Verbindung herzustellen, aber Sie können einen Treiber verwenden, der für Sie bequem ist. Hauptsache, die Spannung entspricht den Getriebemotoren)
-
-plastische Flaschenverschlüsse
- Borsten von einem Besen
-Motor mit Turbinenlüfter, im Prinzip können Sie es selbst tun
Kunststoffgitter
- kleiner Behälter
Box für zwei 18650 Batterien
-
Von den Werkzeugen, die wir auch brauchen werden:
Lötkolben
Klebepistole
Schreibwarenmesser
Linie
- Stifte oder Marker
Der erste Schritt besteht darin, ein großes Blatt Pappe, ein Lineal und einen Kompass zu nehmen. Wir messen 13 cm mit einem Kompass und zeichnen einen Kreis auf Karton, danach schneiden wir ihn aus, insgesamt brauchen wir zwei solche Kreise:


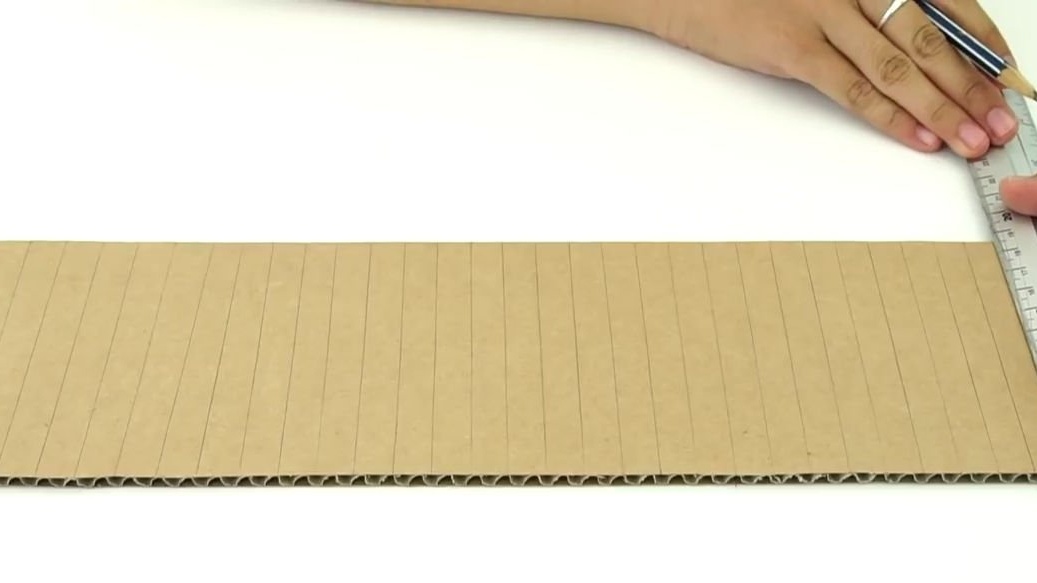
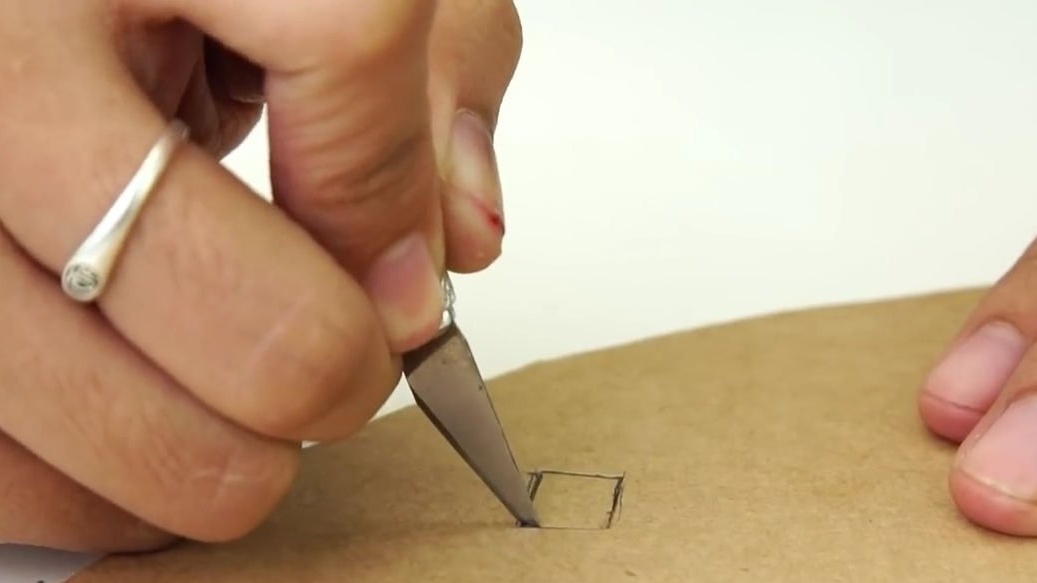
Dann schneiden wir aus demselben Karton ein kleines Rechteck aus. Wir nehmen ein Lineal und einen Bleistift, mit einem Bleistift zeichnen wir einen Karton im Abstand von ca. 1 cm. Nach diesem Vorgang nehmen wir ein Schreibmesser und machen kleine Schnitte von der oberen Pappschicht, ohne den Boden zu berühren. Dies ist notwendig, damit der Karton elastischer wird:



Wir drehen das frühe Werkstück um einen der Pappkreise und kleben es natürlich mit Heißkleber:

Beschäftigen wir uns mit der Elektronik und dem mechanischen Teil.
Um loszulegen, nehmen Sie den Getriebemotor und setzen Sie ein Rad darauf. Wir machen dasselbe mit dem zweiten Motor:

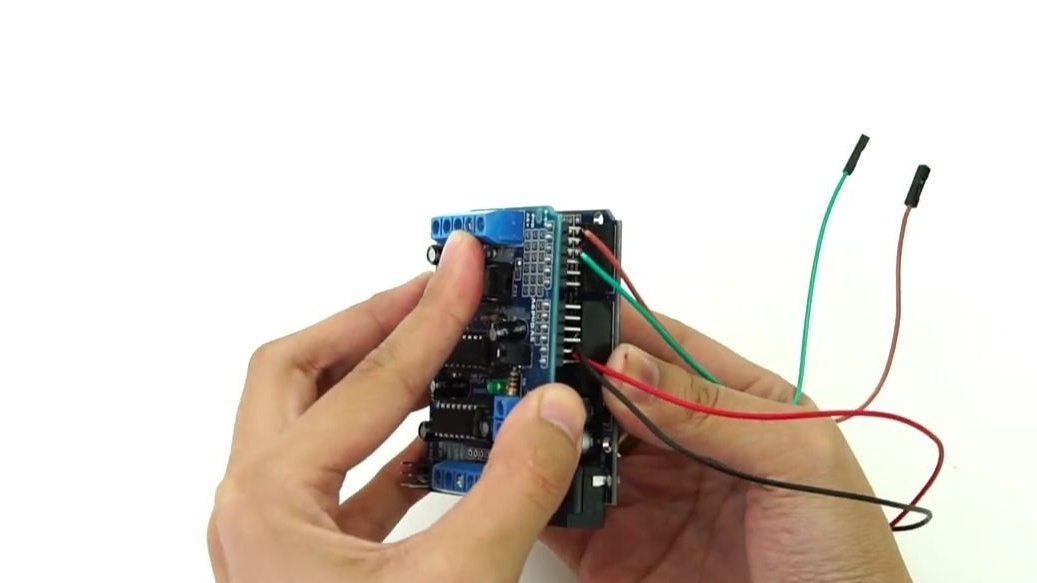
Dann nehmen wir die Arduino Uno-Karte und die Verbindungsdrähte, die wiederum mit bestimmten Stiften (Kontakten) auf der Karte verbunden werden müssen. Der Einfachheit halber nehmen wir verschiedene Farben: Wir verbinden Rot mit 5 Volt, Schwarz mit GND und die anderen zwei mit zwei verschiedenen Pins. An welche Pins die Drähte angeschlossen werden sollen, müssen Sie anhand des Codes sofort herausfinden oder die Pins schreiben, an die Ihre Drähte angeschlossen sind. Im Allgemeinen gibt es hier nichts Kompliziertes, wir verbinden:

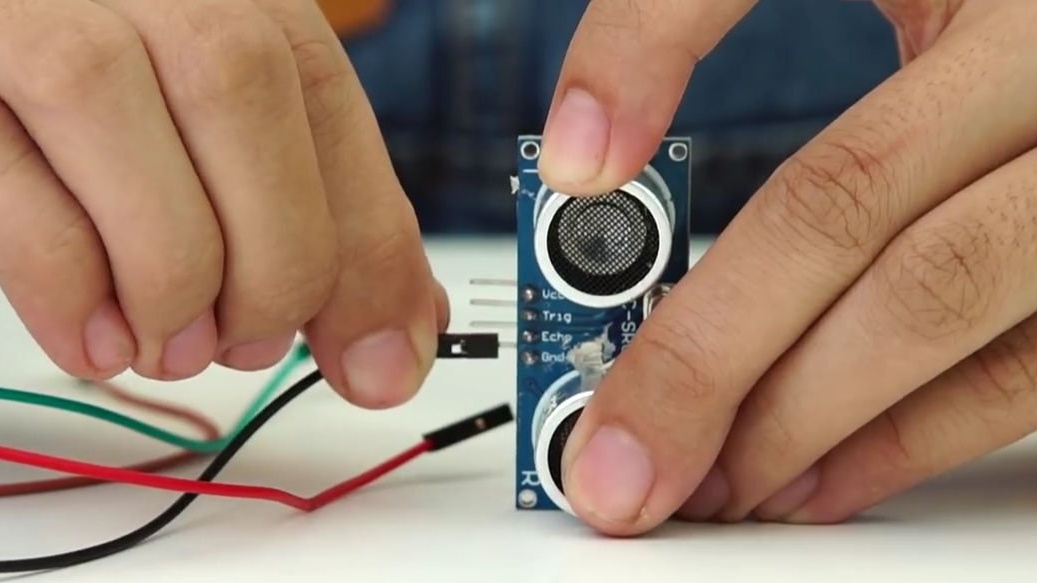
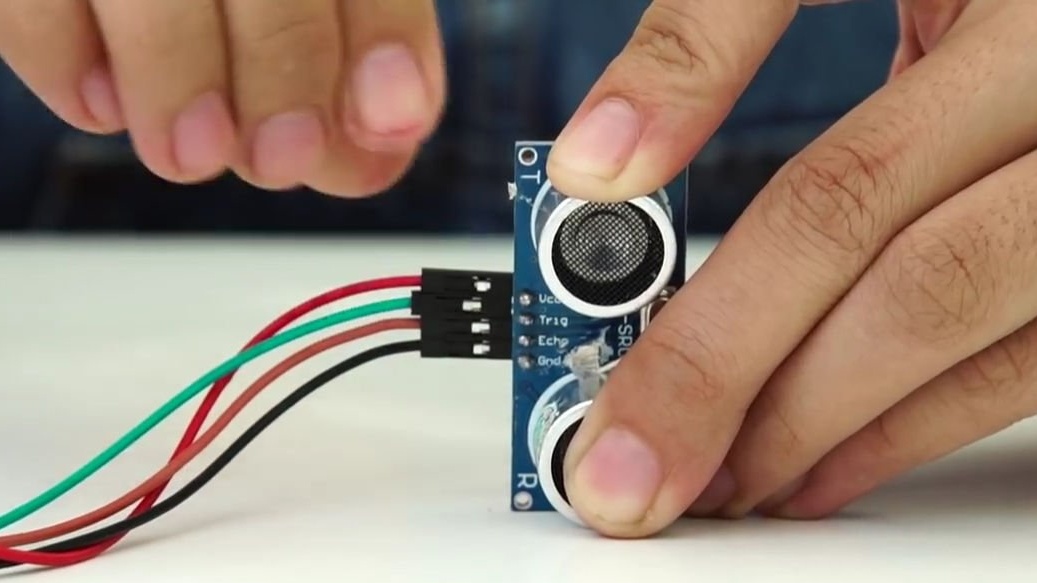
Wir verbinden die gegenüberliegende Seite der Drähte mit dem Ultraschall-Entfernungsmesser, wie auf dem Foto unten gezeigt. Wenn dies nicht klar ist, können Sie das Video des Autors ansehen.
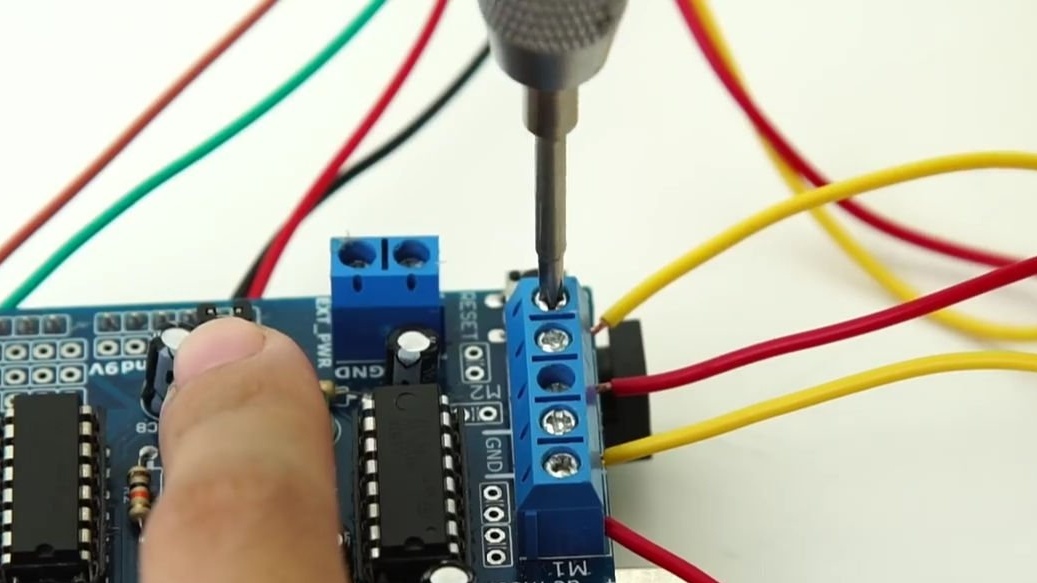
Wir verbinden die Getriebemotoren mit dem Motortreiber. Sie müssen nicht einmal etwas löten. Setzen Sie es einfach in die Klemmen ein und fertig:
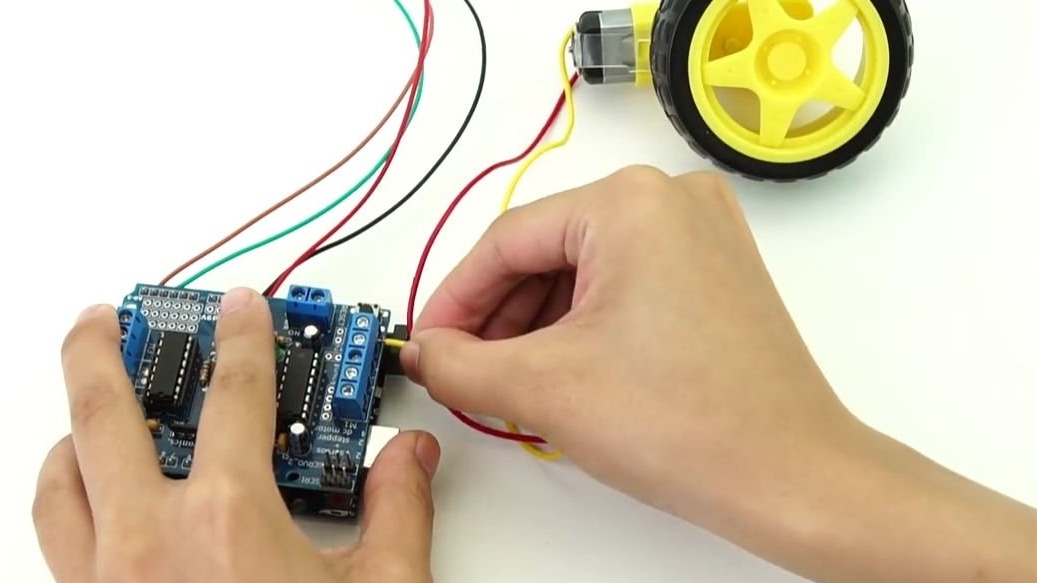

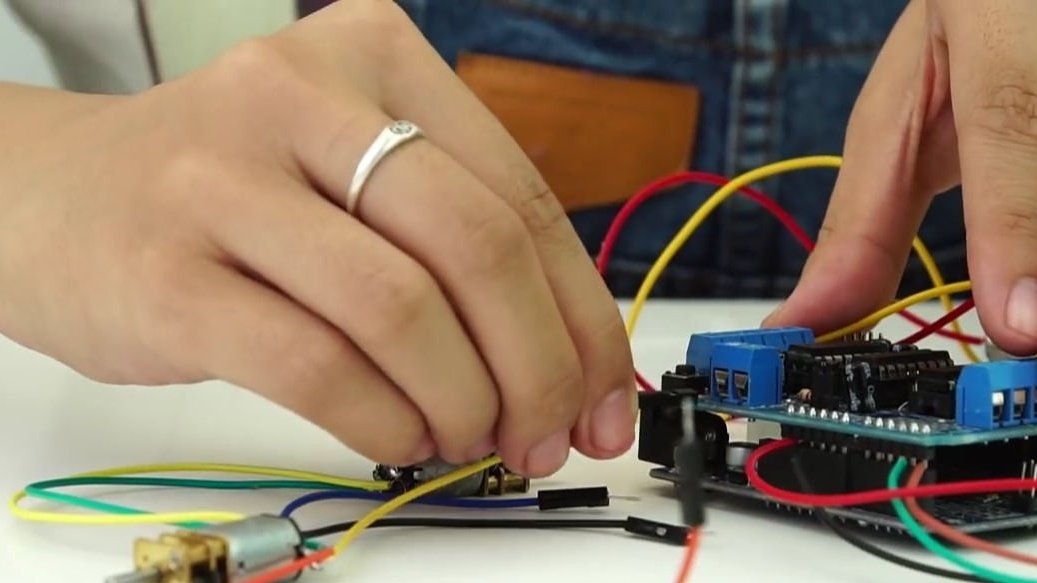
Es ist notwendig, die Verbindungsdrähte mit den Minimotoren zu verlöten, mit denen wir dieselben Motoren mit dem Motortreiber verbinden. Im Allgemeinen verbinden wir:
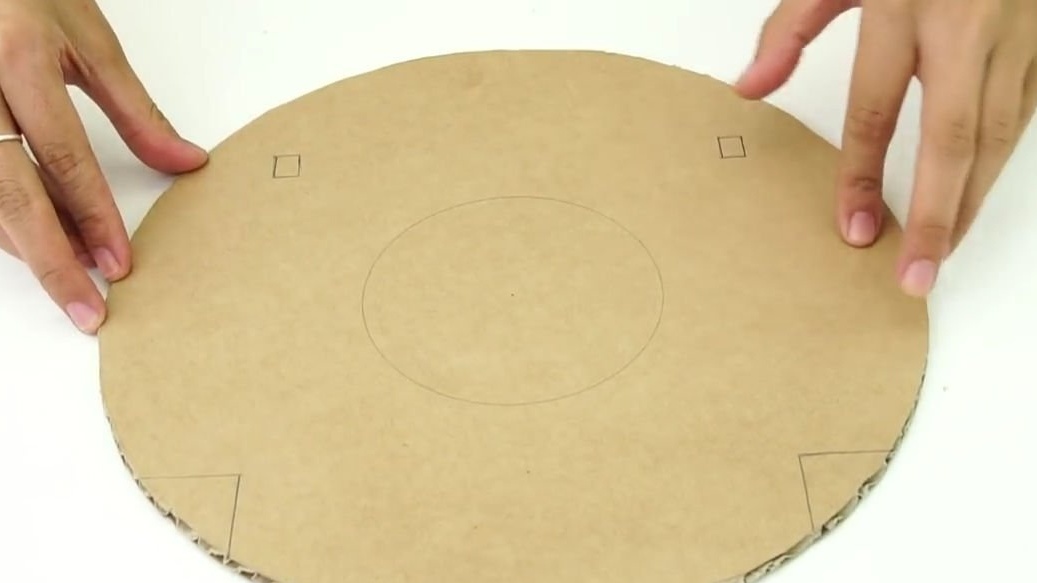
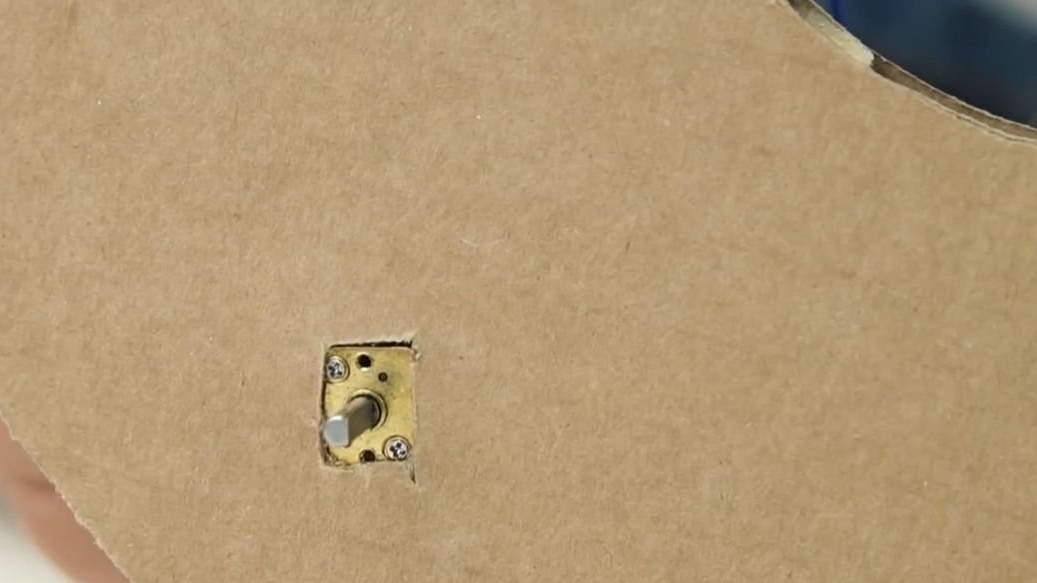
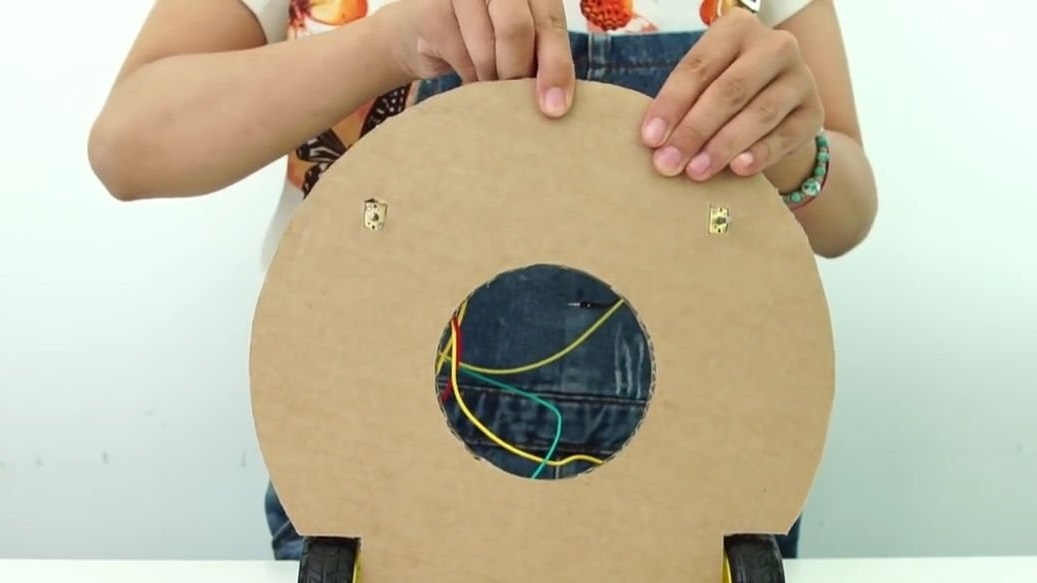
Jetzt nehmen wir den verbleibenden Pappkreis, der ganz am Anfang gemacht wurde. Darauf müssen Sie einen weiteren Kreis in der Mitte und mehrere Rechtecke zeichnen. Sie können alle Markups auf dem Foto unten sehen. Dann schneiden wir die markierten Löcher aus, es sollte genauso ausfallen wie auf dem Foto unten:

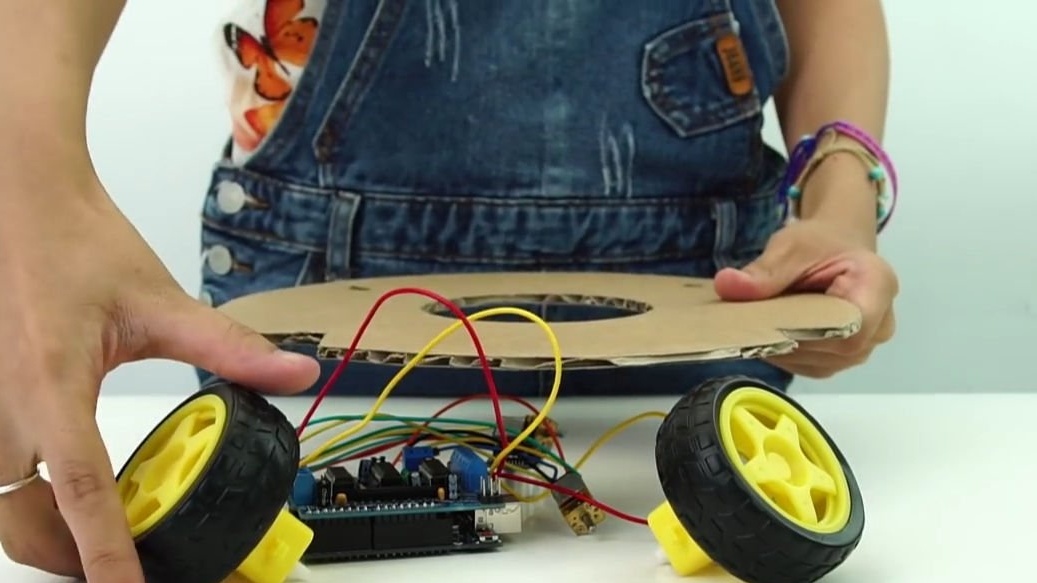
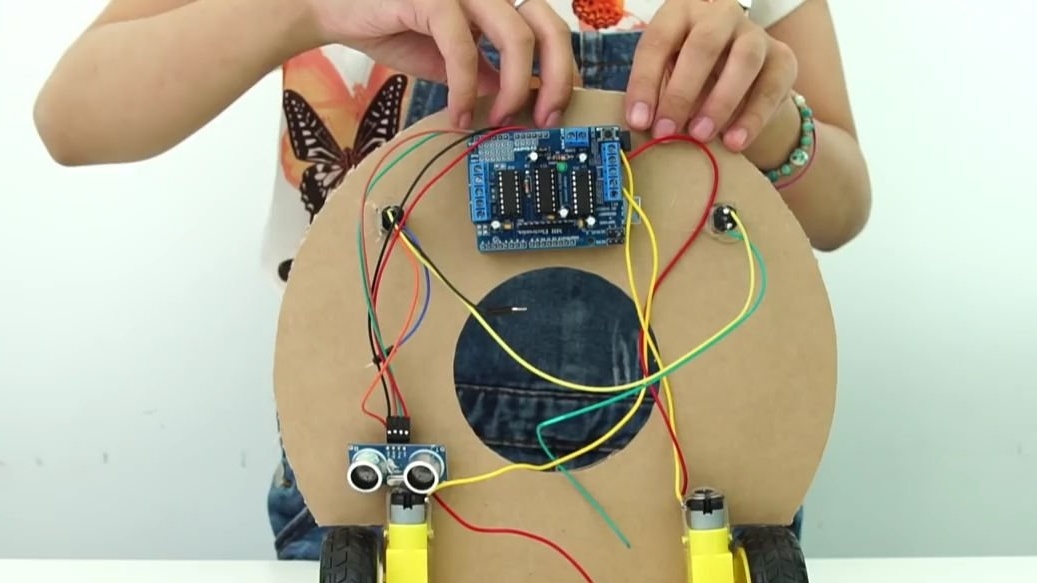
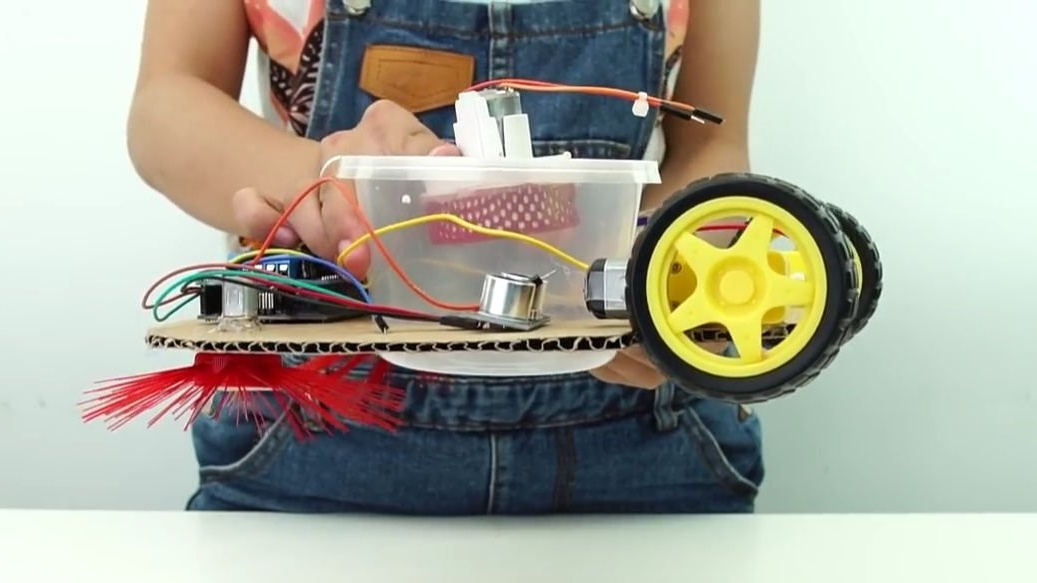
Nimm das Ganze Elektronik und legen Sie es auf einen zuvor erstellten Pappkreis. Wir setzen kleine Motoren in die geschlitzten rechteckigen Löcher ein und befestigen den Rest der Elektronik am Schmelzkleber, bringen große Getriebemotoren parallel zur Rückseite an und berühren den Ultraschall-Entfernungsmesser nicht:

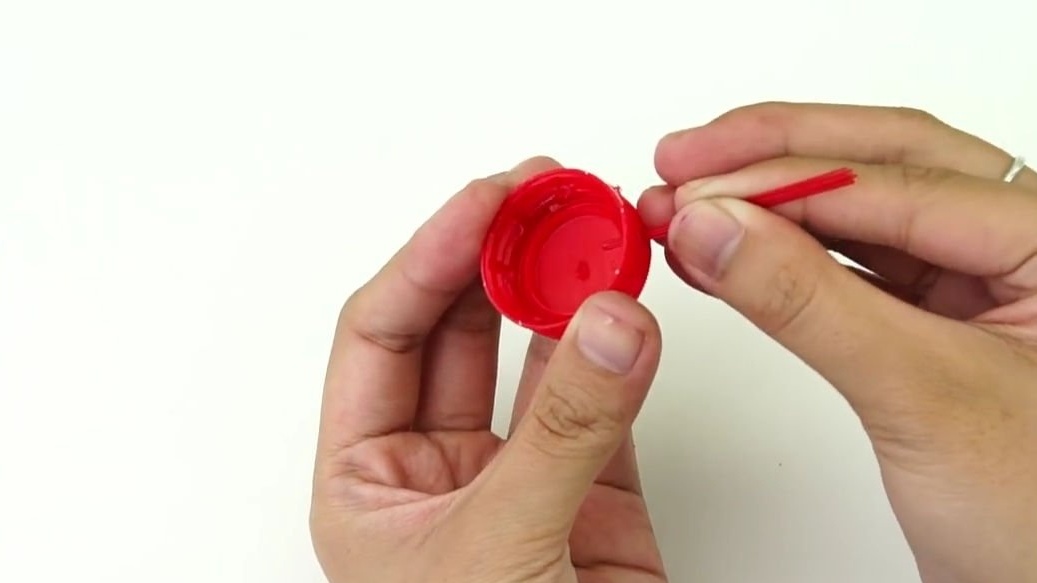
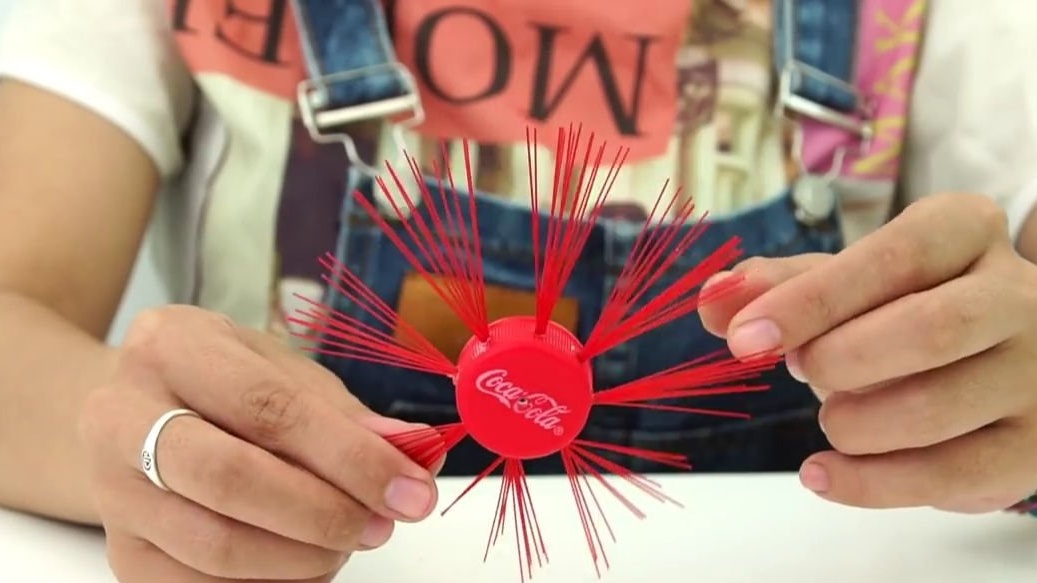
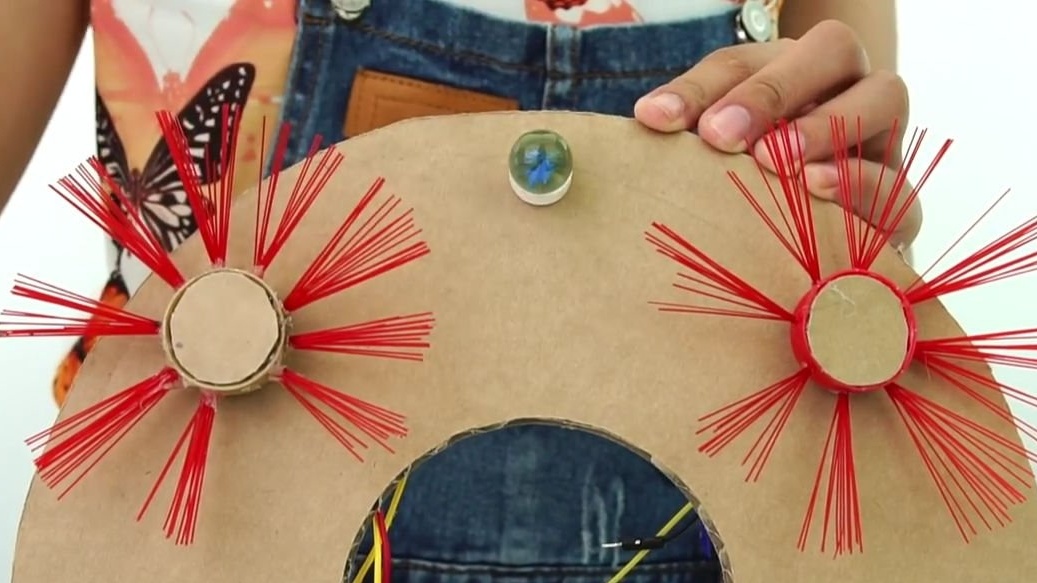
Wir entfernen die Verschlüsse von den Plastikflaschen, wir brauchen nur zwei Teile. Mit einem Lötkolben, einem heißen Nagel oder einer Ahle bohren wir Löcher: eines in der Mitte des Deckels und das andere an den Seiten mit einer Vertiefung von ca. 1 cm. In den seitlichen Löchern stechen wir die zuvor vorbereiteten Borsten aus dem Besen heraus, sie sollten die gleiche Größe haben. Wir befestigen diese Borsten mit Heißkleber. Insgesamt müssen zwei solcher Rohlinge hergestellt werden.
Wir kleben sie auf die Achse kleiner Motoren, die sich auf einem Pappkreis befinden. Wir kleben wieder mit Heißkleber:


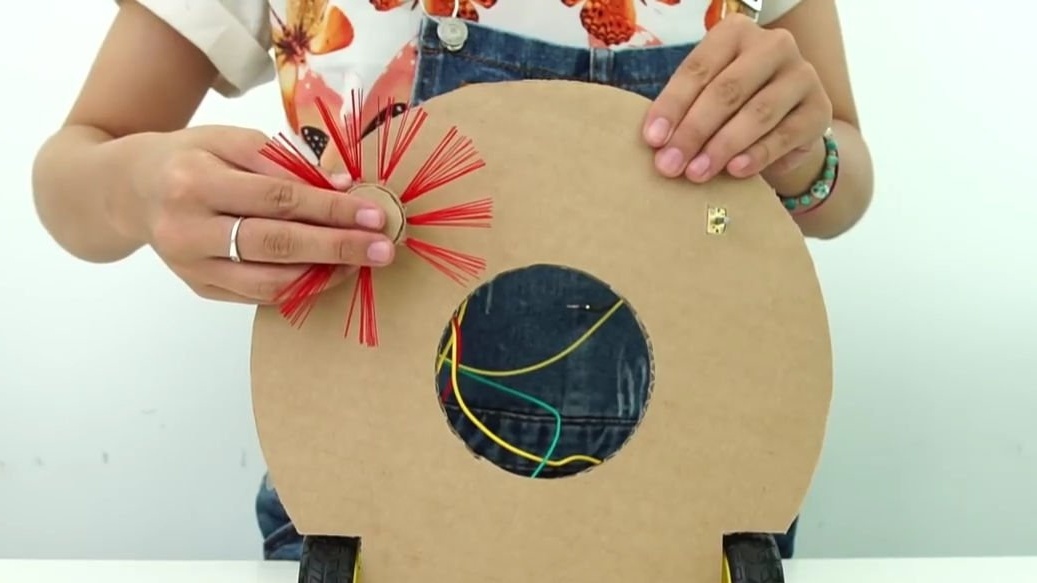

Kleben Sie auf der Vorderseite zwischen zwei Bürsten eine kleine Kugel oder ein kleines Rad, das sich um seine Achse drehen kann:
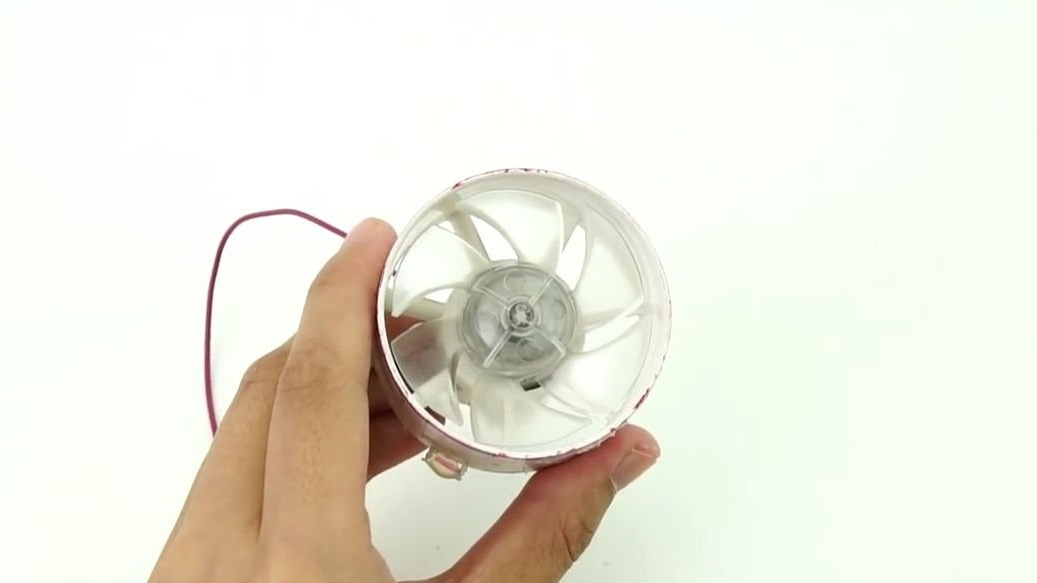
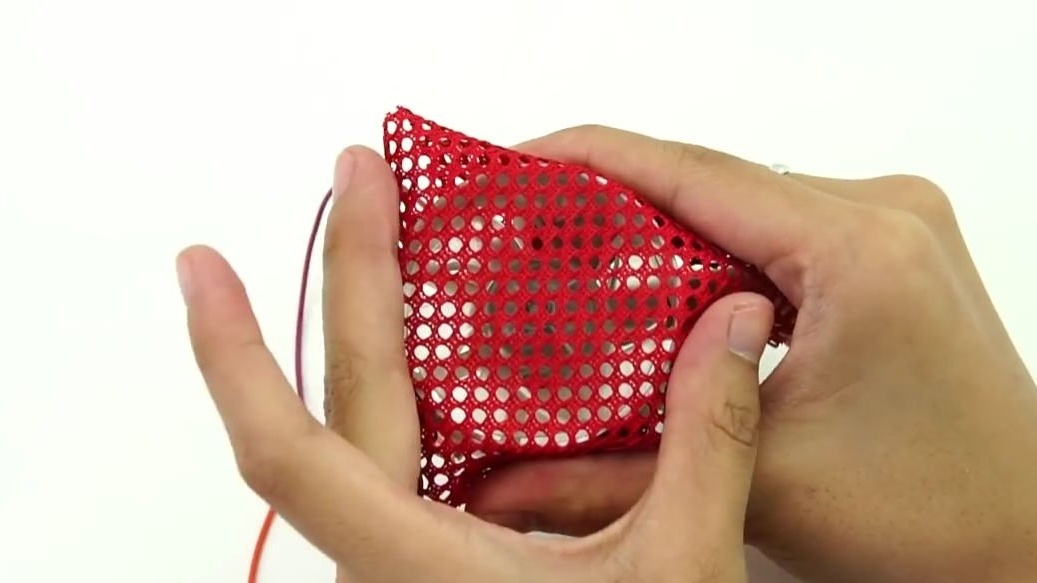
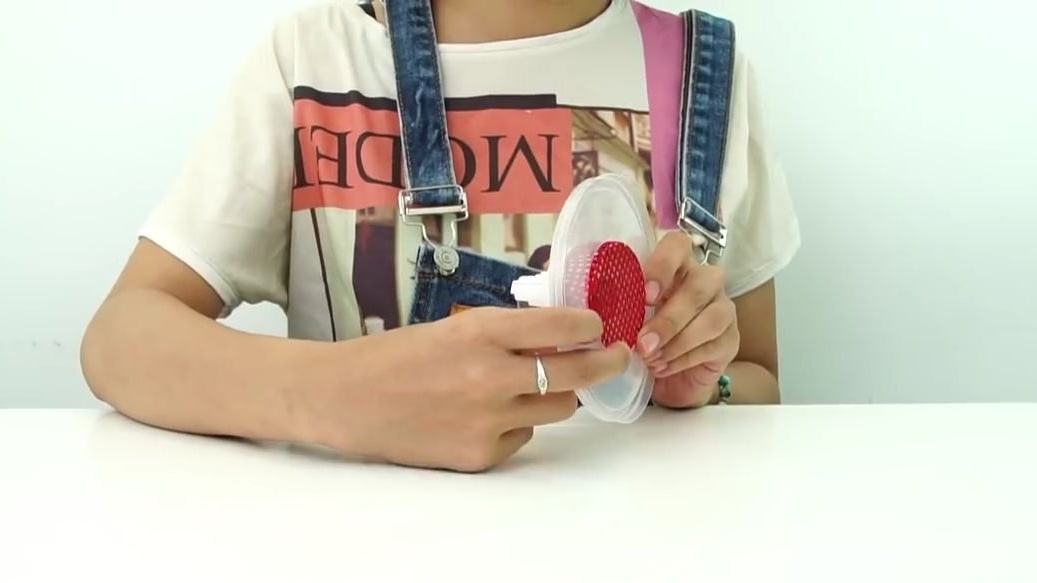
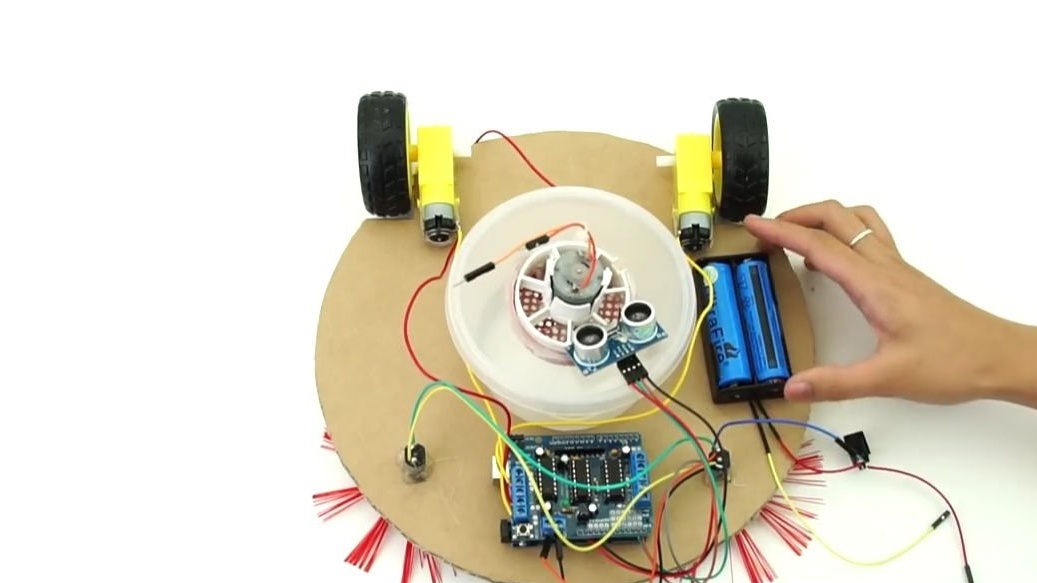
Jetzt brauchen wir einen Elektromotor mit einer Turbine, die Luft ansaugen kann, und im Allgemeinen kann ein sehr starker Kühler entstehen. Wir setzen ein Plastiknetz am vorderen Teil der Turbine auf und befestigen es. Es wird benötigt, um die Turbine zu schützen, dh um zu verhindern, dass große Fremdkörper eindringen und heraussieben. Nehmen Sie den Deckel vom Plastikbehälter ab. Der Behälter sollte vorzugsweise rund sein. In den Deckel machen wir ein gleichmäßiges rundes Loch, in das Sie die Turbine einsetzen und mit einem Netz kleben müssen. Im Behälter selbst machen wir mit der Kante ein kleines rechteckiges Loch. Setzen Sie den Deckel mit der Turbine auf den Behälter und Sie sind fertig. Der Saugteil des Roboters ist fertig. Ich möchte Sie daran erinnern, dass alles wie auf dem Foto unten gezeigt gemacht werden muss:



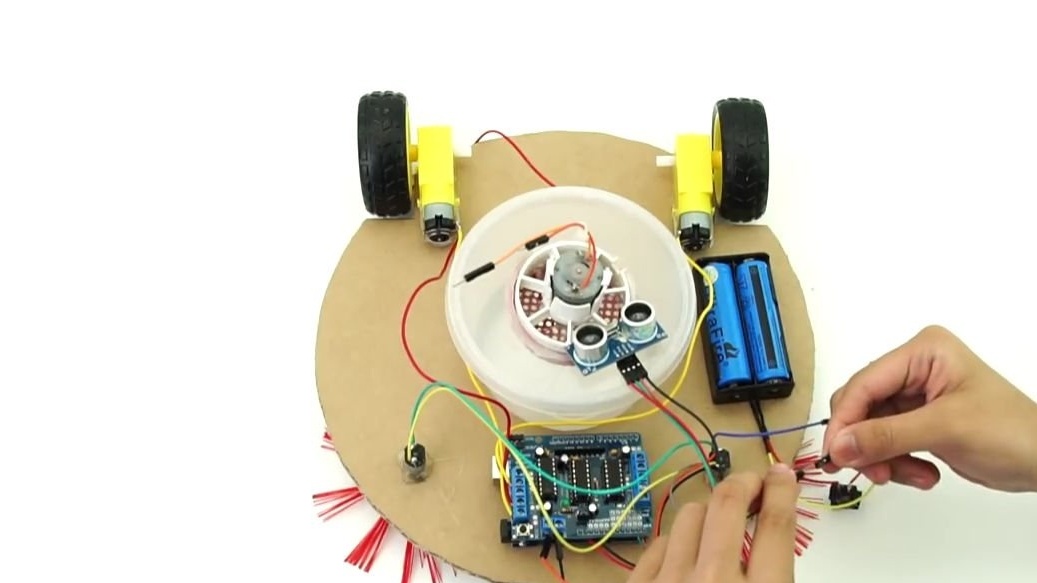
Wir nehmen die Basis des Roboters und installieren einen Behälter mit einer Turbine im zentralen Loch und kleben alles fest mit Heißkleber. Dann installieren wir an der Seite der Struktur eine Box mit 18650 Batterien und einen Schalter, der an eines der von der Box kommenden Drähte angeschlossen ist. Wir schließen neue Drähte an, um Arduino mit Strom zu versorgen, wir machen endgültige Haarschnitte und wir können fortfahren.
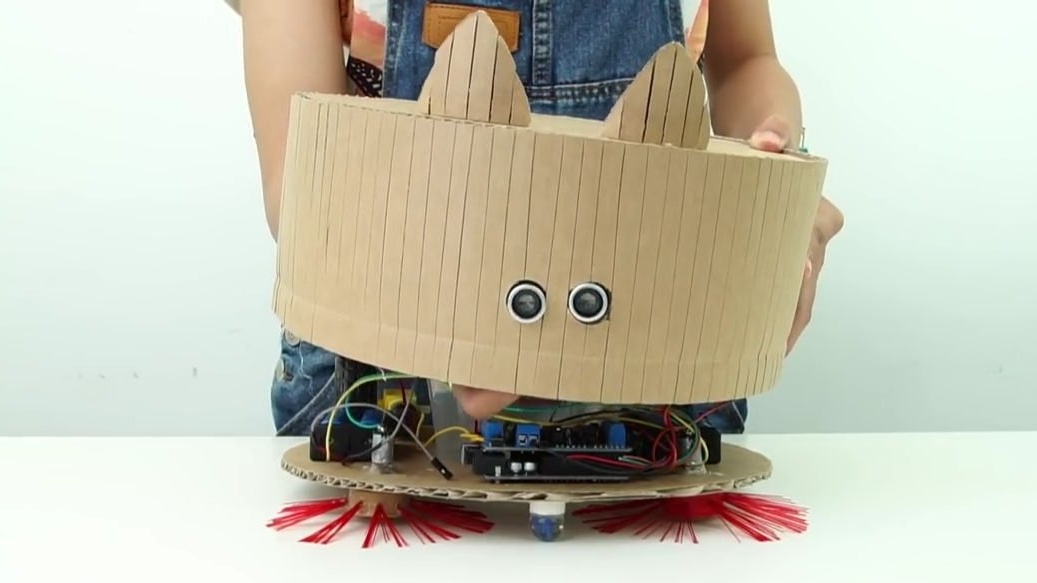
Wir führen den Ultraschall-Entfernungsmesser in spezielle Löcher ein, die im Voraus im Roboterkörper durchgeführt werden müssen. Wie Sie sich vielleicht erinnern, wurde dieses Gebäude am Anfang gebaut. Der Autor des Artikels fügte auch dekorative Elemente in Form von Ohren hinzu, und ein Ultraschall-Entfernungsmesser kommt anstelle des Auges heraus, all dies sieht sehr gut aus. Wir legen das Gehäuse über die Basis der Struktur und reparieren es, aber nicht sehr viel, denn in diesem Fall müssen Sie die Batterien zum Aufladen besorgen.Natürlich können Sie ein Modell zum Laden von Batterien direkt in den Roboter einbauen, aber es ist unwahrscheinlich, dass es das qualitativ hochwertige Laden ersetzt.

Es bleibt nur das Hochladen der Firmware auf Arduino. Im Allgemeinen ist es am besten, dies nach dem Anschließen aller elektronischen Komponenten zu tun, um die Schaltung und den Code zu überprüfen. Sie können dies jedoch später tun. Es ist am besten, eine Skizze zu schreiben, um Arduino selbst zu gießen, aber Sie können einfach im Internet eine fertige Skizze für Roboter mit einem Ultraschallsensor finden, der sich um ein Hindernis bewegt. Der Vorteil solcher Skizzen ist jetzt vollständig. Um jedoch verschiedene Fallstricke zu vermeiden, ist es besser, selbstständig zu schreiben.
Nun, das ist es! Ein einfacher und funktionsfähiger Roboterstaubsauger ist fertig und muss nur noch getestet werden! Schalten Sie es dazu einfach ein und fahren Sie auf dem Boden und saugen Sie den gesamten Müll ab. Der Roboter bewegt sich selbst und dreht sich, wenn sich das Hindernis nähert. Dies ist viel praktischer als bei früheren Modellen.



Hier ist ein Video des Autors mit einer detaillierten Montage und hausgemachten Tests:
Sie können diesen Roboter auch von einer leistungsstarken Bank aus antreiben. Sie können meine ausführliche Bewertung für einen guten sehen, der sich natürlich dafür interessiert:
Nun, alle viel Glück bei zukünftigen Projekten, Freunde!