







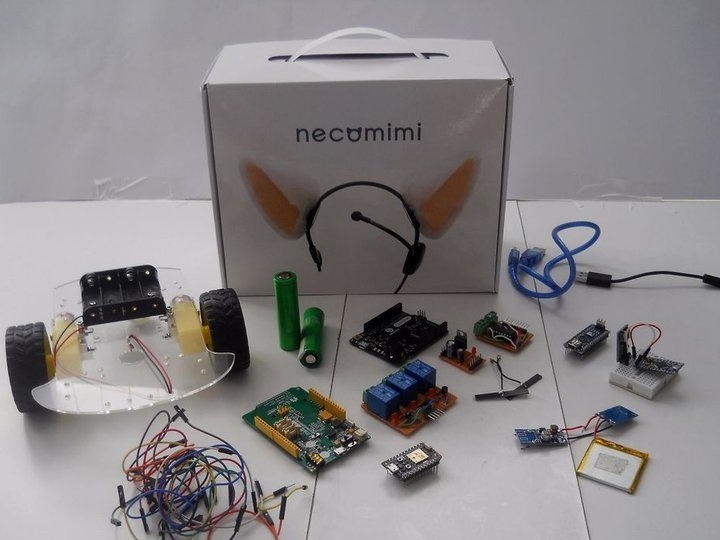
Das Hauptkonzept dieses Projekts besteht darin, dass der Benutzer mithilfe verschiedener Gehirnwellen den Roboter und den Cursor auf seinem PC steuern oder das Licht in seinem Haus ein- und ausschalten kann, während der Mikrocontroller (Partikelphoton) eine Online-Analyse der Gehirnwellen des Benutzers erstellt. Also ja, mit diesem Gerät können Sie die Kraft des Denkens wirklich nutzen
 ... Dieses Gerät ist nicht nur für Faulenzer oder Fans gedacht, es wurde entwickelt, um Menschen die Möglichkeit zu geben. die jeden Tag mit ihrer Behinderung kämpfen. Der RoboterDie vom Autor entwickelte Funktion funktioniert wie ein Rollstuhlsystem nach Hause Die Automatisierung hilft dem Benutzer, das Licht oder den Fernseher zu steuern, auch wenn er sich nicht bewegen kann. Der PC-Controller-Modus kann auch für diejenigen nützlich sein, die vollkommen gesund sind.
... Dieses Gerät ist nicht nur für Faulenzer oder Fans gedacht, es wurde entwickelt, um Menschen die Möglichkeit zu geben. die jeden Tag mit ihrer Behinderung kämpfen. Der RoboterDie vom Autor entwickelte Funktion funktioniert wie ein Rollstuhlsystem nach Hause Die Automatisierung hilft dem Benutzer, das Licht oder den Fernseher zu steuern, auch wenn er sich nicht bewegen kann. Der PC-Controller-Modus kann auch für diejenigen nützlich sein, die vollkommen gesund sind. Wie funktioniert es
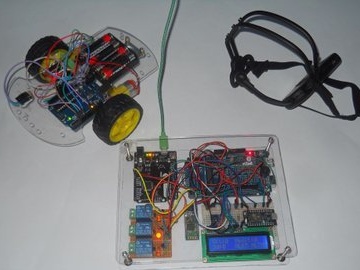

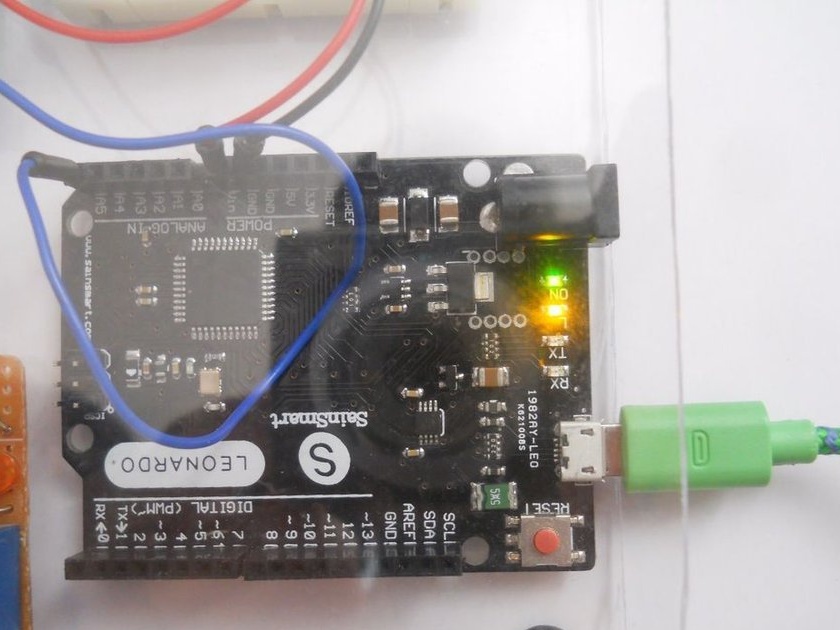
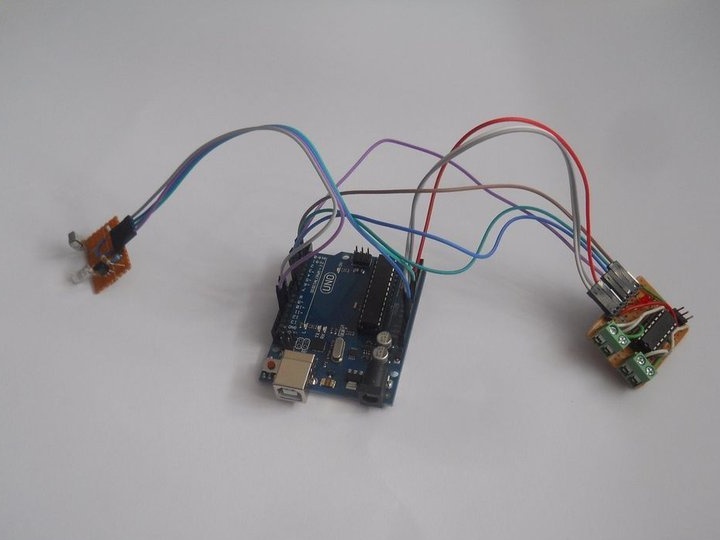
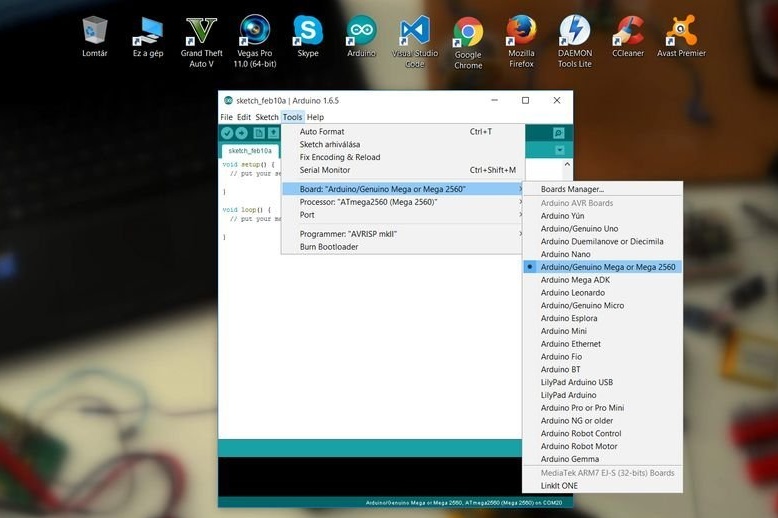
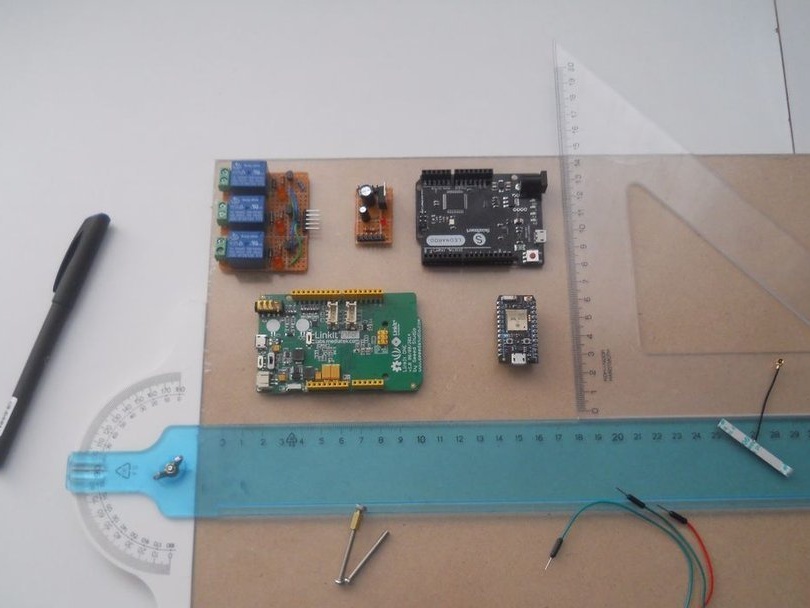
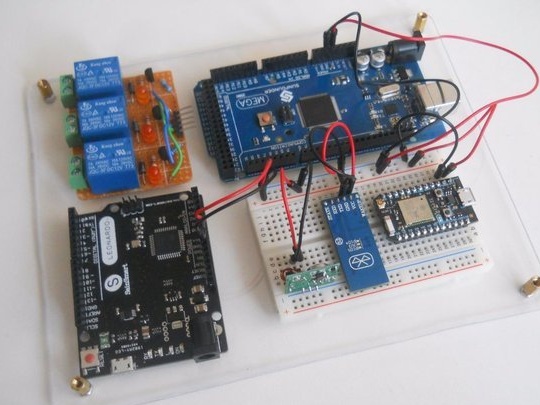
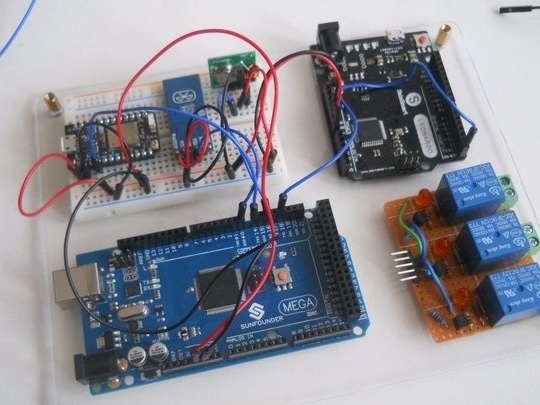
Vier Mikrocontroller wurden verwendet, um dieses Projekt zum Leben zu erwecken: Arduino Mega, Arduino Leonardo, UNO und Teilchenphoton. Mega ist das Gehirn des Projekts, das Signale vom Headset empfängt, analysiert und Befehle an andere Geräte sendet. Übergibt alle Daten an Particle Photon, das einen Webserver erstellt. Leonardo steuert die Maus auf einem PC und Uno wird verwendet, um IR (Infrarotsignale) zu empfangen und den Roboter zu steuern. Ein Gerät kann drei verschiedene Geräte steuern (oder mehr, wenn Sie etwas anderes programmieren möchten). Ferner werden diese drei verschiedenen Geräte als Kanäle bezeichnet. Das Gerät wechselt zwischen diesen Kanälen, wenn Sie die Augen schließen:
Schließen Sie Ihre Augen für 1-2 Sekunden: Wechseln Sie zur Hausautomationsfunktion
Schließen Sie Ihre Augen für 2-4 Sekunden: Wechseln Sie in den Robotersteuerungsmodus
Schließen Sie Ihre Augen für 1-6 Sekunden: Wechselt in den Maus-Controller-Modus
Um die Funktion der Hausautomation zu nutzen, an die Sie alles anschließen können: Es wurden ein Fernseher, Glühbirnen, Steckdosen, alles, was Sie wollen, Relais verwendet
Für die Wahrnehmung von Gehirnwellen - Necomimi, das Ihre Ohren abhängig von Ihren Gehirnwellen bewegen kann (Aufmerksamkeit, Meditation). In einem kleinen Chip, der Gehirnwellen liest, Rauschen herausfiltert und ein sehr gutes Signal liefert. Es funktioniert mit der UART-Schnittstelle (seriell), sodass wir mit etwas Hacking Arduino verwenden können, um Gehirnwellen zu lesen.Die Rolle dieses Headsets besteht darin, Gehirnwellen drahtlos an einen zentralen Server zu übertragen.
Wenn Sie bereits vertraut sind vorheriges ProjektDann können Sie die Demontage- und Umbauphase von Necomimi überspringen.
Sehen Sie sich an, wie Sie ein drahtloses Bluetooth-Headset zerlegen und daraus machen können.
Hausautomations-Steuerungssystem
Wenn Sie in den Hausautomationsmodus wechseln, erhöhen Sie Ihre Aufmerksamkeitsstufe über 70, um das erste Relais einzuschalten, erhöhen Sie Ihre Meditationsstufe über 70, um Ihr zweites Relais einzuschalten, und erhöhen Sie beide Werte über 70, um Ihr drittes Relais einzuschalten. Es ist ein wenig schwierig, aber nach einigem Training des Geistes nicht unmöglich. Wenn das Relais bereits eingeschaltet ist, schalten Sie es mit demselben Befehl aus (wenn es eingeschaltet ist, erreichen Sie 70, um es auszuschalten). Wenn das System bereit ist, kann jedes Hochspannungsgerät (Licht, Fernseher, Computer, Lüfter usw.) an das Relaismodul angeschlossen werden.
Maussteuerung
Der Cursor wird von Emotionen gesteuert. Wenn die Aufmerksamkeitsstufe weniger als 25 beträgt, bewegt sie sich nach links, wenn sie sich zwischen 25 und 50 nach rechts bewegt, wenn sie zwischen 50 und 75 steigt und wenn sie zwischen 75 und 100 fällt. Sie können einen Mausklick ausführen, indem Sie den Meditationsgrad erhöhen. Natürlich müssen Sie dafür trainieren.
Robotersteuerung
Der Roboter hat nur drei verschiedene Teams: Halten Sie an, biegen Sie links ab und bewegen Sie sich vorwärts. Warum nur zwei Bewegungsoptionen? Weil diese beiden Richtungen ausreichen, um den Roboter überall hin zu bewegen. Verwenden Sie Ihre Meditationsstufe, um sich mit dem Roboter zu drehen. Wenn Sie die Richtung erreicht haben, in die Sie sich bewegen möchten, stoppen Sie den Roboter und bewegen Sie sich dann mit der Aufmerksamkeitsstufe vorwärts. Dies ist der beste Weg, um den Roboter zu steuern, und selbst Anfänger, die ihre Aufmerksamkeits- / Meditationswerte nicht so gut steuern können, können mit diesem Roboter spielen.
Das Headset überträgt BT-Signale (Bluetooth) an das Arduino Mega, das eingehende Bytes analysiert und je nach Meinung des Benutzers verschiedene Funktionen steuert. Zuerst wollte der Autor Particle Photon als Datensender verwenden, aber dieses kleine Modul spielte eine Rolle bei der Erstellung eines Webservers. Es war die größte Modifikation im gesamten Projekt. Er verwendete auch selbstgemachte Arduino-Module, aber Sie können diese Module online kaufen.
Alle Teile stammen von GearBest.com. Dies ist ein Online-Shop, genau wie eBay, aber Ersatzteile werden viel schneller geliefert (möglicherweise ist dies alles auf aliexpress). Wenn Sie also Ihren eigenen Gamecontroller, Robotercontroller oder Force Detector erstellen möchten, kaufen Sie zunächst Teile.






Erforderliche Werkzeuge:
Lötkolben
löten
Klebepistole
selbstklebendes Klebeband / doppelseitiges Klebeband
Abisolierzange
Drahtschneider
Ausrüstung
/ Arduino Nano
Software:
Necomimi hacken







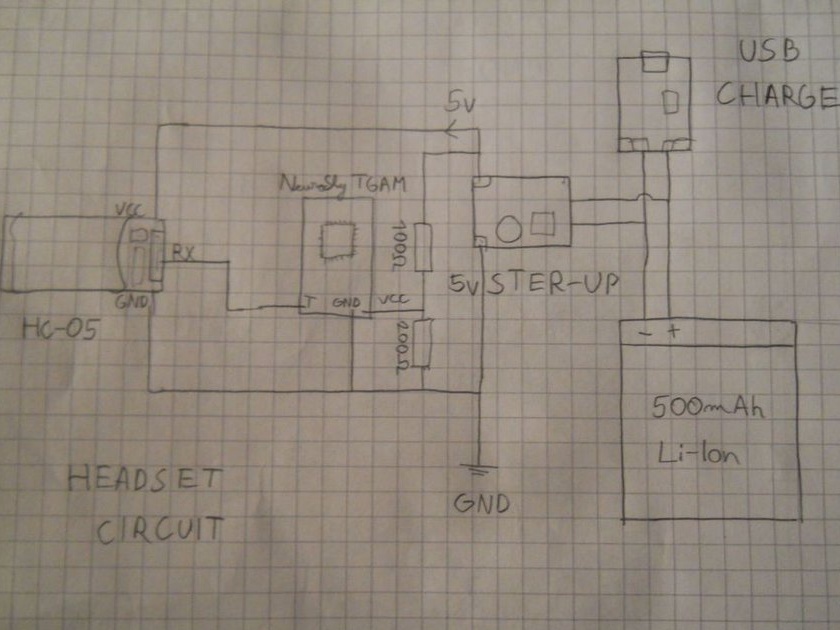
Wir möchten dieses EEG-Spielzeug für die Datenübertragung über Bluetooth modifizieren, daher werden wir zuerst das Gehäuse zerlegen. Schrauben befinden sich unter dem Aufkleber. Entfernen Sie den Aufkleber und die Rückseite des Geräts, und darin befinden sich kleine Bretter. Der unter der Hauptplatine ist der Neurosky TGAM-Chip. 4 Drähte von der Hauptplatine des Mikrocontrollers sind daran angelötet. Nehmen Sie also einen Lötkolben und entfernen Sie diesen Stromkreis vorsichtig. Löten Sie nun die drei Drähte an den GND-Pin, den VCC-Pin und den T-Pin. Ein T-Pin ist ein Senderausgang mit einer Geschwindigkeit von 57600 Baud, der Datenpakete an unseren Mikrocontroller sendet. Sobald Sie die drei oben genannten Drähte verlötet haben, können Sie Ihre eigene wiederaufladbare Stromquelle einbauen. Der Autor verwendet einen 500-mAh-Lithium-Ionen-Akku, eine USB-Ladeschaltung, eine 5-V-Boost-Schaltung und zwei Widerstände (100 Ohm und 200 Ohm), um eine separate 3,4-V-Stromversorgung für den Chip und das Bluetooth-Modul bereitzustellen. Auf dem Foto das Anschlussdiagramm.
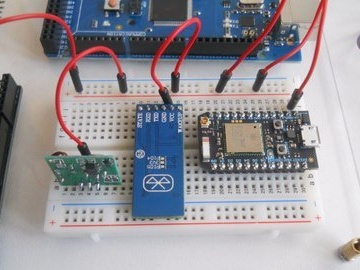
Wenn die Schaltung bereit ist, konfigurieren Sie das Bluetooth-Modul.
Befolgen Sie die nachstehenden Anweisungen und Abbildungen und erstellen Sie Ihr eigenes drahtloses EEG-Headset.
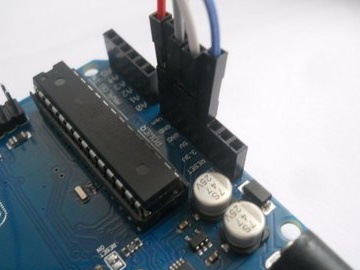
Der wichtigste Teil besteht darin, den T-Pin mit dem RX des Bluetooth-Moduls zu verbinden.



HC-06: Laden Sie zuerst die Skizze mit dem Namen „HC_06_Bluetooth“ auf Arduino UNO hoch und verbinden Sie dann das Bluetooth-Modul wie in der Abbildung gezeigt.
// HC-06-Bluetooth
void setup () {
// Starten Sie die Hardware-Serie.
Serial.begin (9600); // Standard-HC-06-Baudrate
Verzögerung (1000);
Serial.print ("AT");
Verzögerung (1000);
Serial.print ("AT + VERSION");
Verzögerung (1000);
Serial.print ("AT + PIN"); // Passwort entfernen
Verzögerung (1000);
Serial.print ("AT + BAUD7"); // Baudrate auf 576000 setzen - zB Necomimi dafault
Verzögerung (1000);
Serial.begin (57600); // //
Verzögerung (1000);
}}
void loop () {
}}Öffnen Sie den seriellen Monitor in der Arduino IDE und warten Sie, bis der Arduino das BT-Modul konfiguriert hat. Ihr Bluetooth-Modul ist jetzt auf 57600 Baud eingestellt. Sie können viele BCI-Anwendungen (Brain Computer Interface) ausprobieren, da dieses gehackte Necomimi-Spielzeug mit allen Neurosky-Anwendungen kompatibel ist.
Mit diesen Apps können Sie lernen, wie Sie Ihre Gehirnwellen steuern.
HC-05: Verwenden Sie dann "HC_05_Bluetooth" und laden Sie Ihr Arduino auf die gleiche Weise wie zuvor.
// HC-06-Bluetooth
void setup () {
// Starten Sie die Hardware-Serie.
Serial.begin (9600); // Standard-HC-05-Baudrate
Verzögerung (1000);
Serial.print ("AT");
Verzögerung (1000);
Serial.print ("AT + VERSION");
Verzögerung (1000);
Serial.println ("AT + ROLE = 1"); // Setze den HC-05 in den Master-Modus
Verzögerung (1000);
Serial.println ("AT + LINK =" Geben Sie hier Ihre Adresse ein "); // Jetzt sollte das Modul automatisch verbunden werden
Verzögerung (1000);
Serial.print ("AT + UART = 57600,1,0"); // Baudrate auf 576000 einstellen
Serial.begin (57600); // //
Verzögerung (1000);
}}
void loop () {}}
Verbinden Sie den "EN" -Pin des HC-05 mit dem 3v3 Arduino. Sie müssen die Adresse Ihres HC-06-Moduls in Code schreiben. Überprüfen Sie die Adresse des BT-Moduls auf Ihrem Android-Smartphone. Ersetzen Sie ":" (doppelte Punkte) durch "," Kommas im Code.
Und Sie müssen die Adresse im Code ändern: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Somit kann das HC-05-Modul die Adresse erkennen.
Fernbedienung
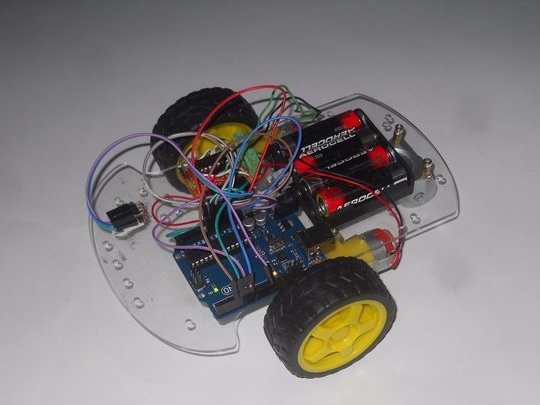
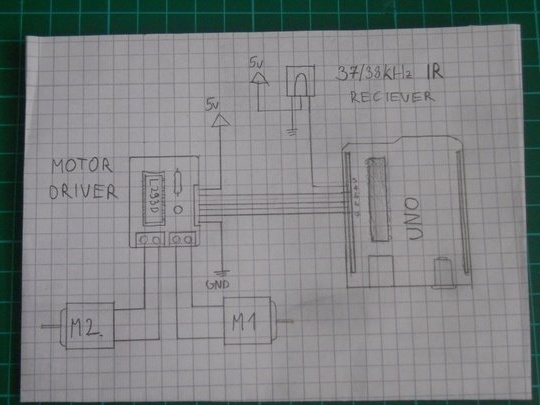
Um diesen kostengünstigen Roboter herzustellen, wurde ein 38-kHz-Infrarotsensor verwendet, der in Fernsehfernbedienungen verwendet wird.
Lokführer
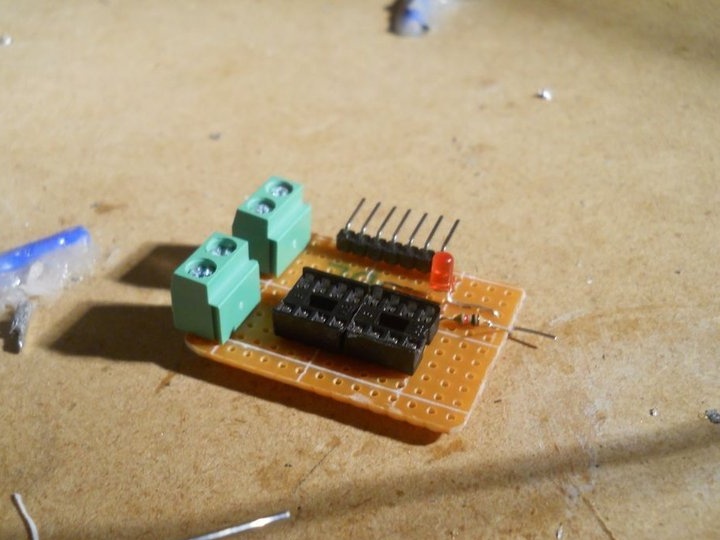
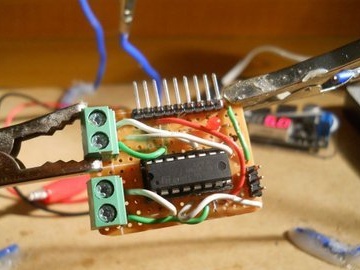
Motorantriebsdiagramm - Sie benötigen die folgenden Details:
2 Schraubklemmen
L293D IC3
Header Pin (90 Grad)
1k Widerstand
Rote LED
Drähte
Leiterplatte
Verwenden Sie mehrere Kupferdrähte und verbinden Sie die Mikroschaltungsstifte gemäß dem Diagramm mit den Anschlussstiften. Es spielt keine Rolle, welches Bein des Mikrokreises an welchen Stift des Steckers angeschlossen ist. Denken Sie nur daran, wo Sie sie angeschlossen haben. Die LED ist in Reihe mit dem Widerstand und parallel zu 5 V VCC geschaltet.
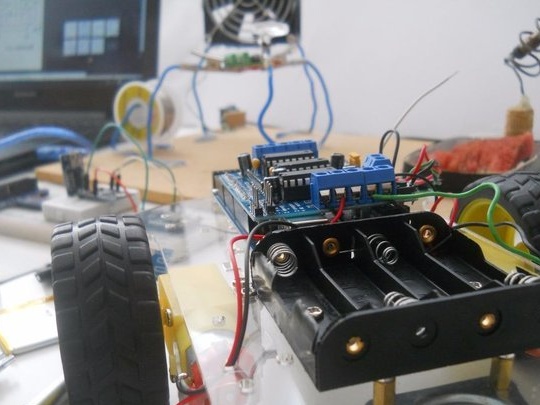
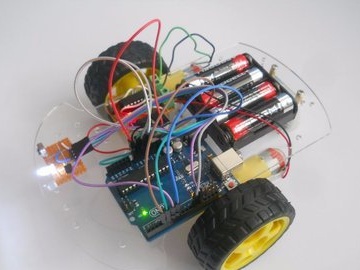
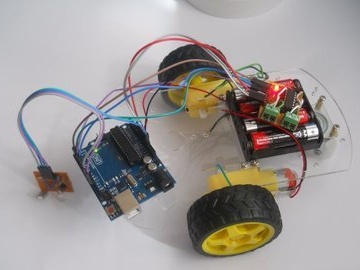
Chassis-Baugruppe
Als Elektromotortreiber wird der L293D-Chip verwendet, der zwei Motoren steuern kann. Schauen Sie sich das Diagramm an, um das Diagramm zu erstellen.
Verbinden Sie Teile mit Arduino
Arduino Pin == & gt; Motortreiber
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Schauen Sie sich also den Schaltplan des L293D-Moduls an und verbinden Sie seine Kontakte wie oben beschrieben mit dem Arduino UNO. Pin 5v Arduino muss mit Pin 1, 9, 16 verbunden sein, um die Steuerfunktion des Chipmotors zu aktivieren. Verwenden Sie dann schließlich die Schraubklemmen, um die Motoren einzuschalten.
Die Bibliothek verwendet IRremote, einen Code, der 38-kHz-Infrarotsignale liest, dekodiert und dann den Roboter bewegt. (Laden Sie die Bibliothek im Abschnitt "Software" herunter).
Der Code enthält Kommentare, aber unter dem Strich werden die vom Hauptserver kommenden IR-Signale dekodiert und je nach Wunsch des Benutzers die Motoren eingeschaltet. Danach bewegt sich der Roboter vorwärts oder nach links. Laden Sie den Code herunter: "Robot_Code". Laden Sie dies auf Ihr Arduino herunter und Ihr Roboter ist bereit.
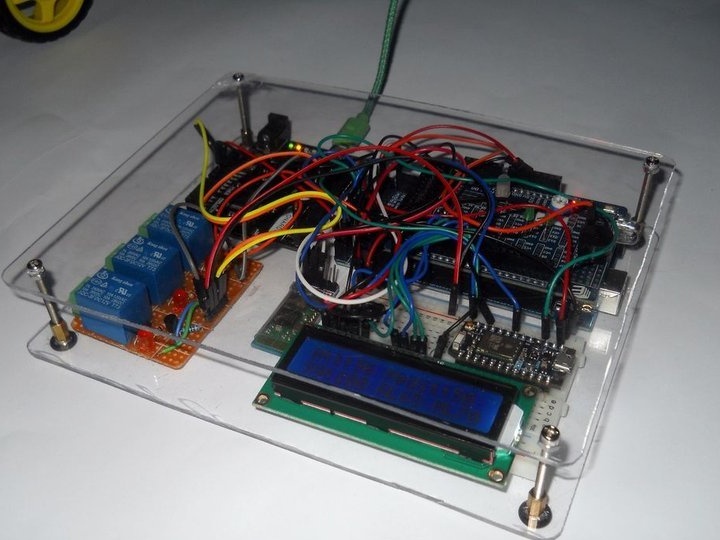
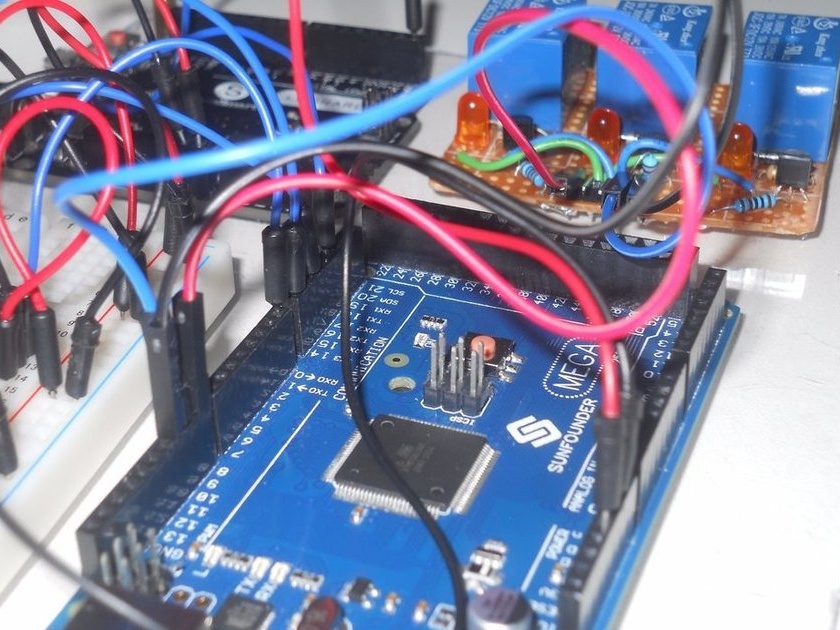
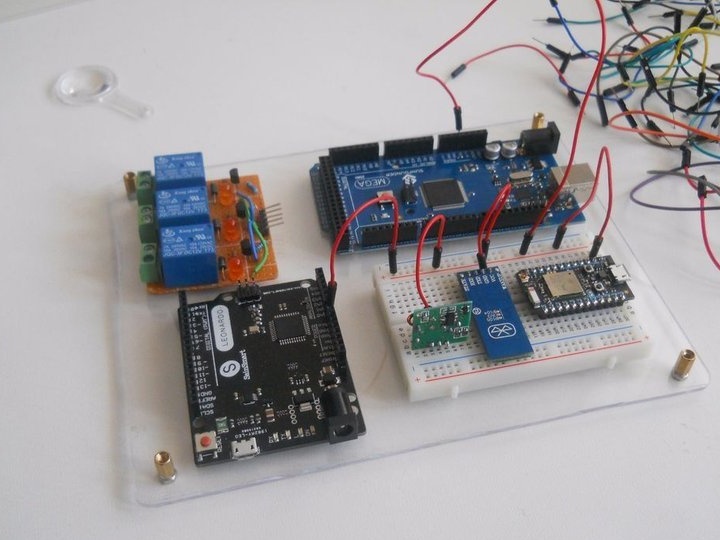
Hauptserver (Arduino Mega, Leonardo, Photon)




Der Server liest eingehende Datenpakete vom drahtlosen Headset. Wir werden das konfigurierte BT-Modul verwenden, um die Kommunikation zwischen dem Headset und dem Server bereitzustellen. Arduino Mega ist das Gehirn der gesamten Schaltung, alles ist mit diesem Mikrocontroller verbunden: Bluetooth, Infrarot-Sender-LED, Webserver und Maus-Controller. Der Code ist etwas kompliziert, hat aber in der Regel Kommentare zu verstehen.
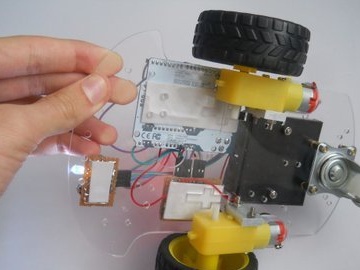
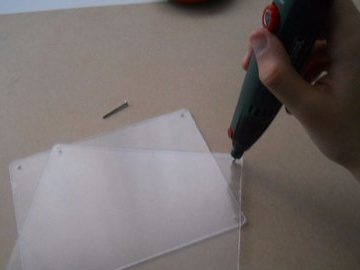
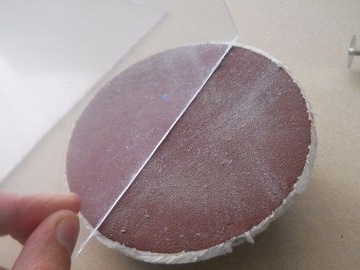
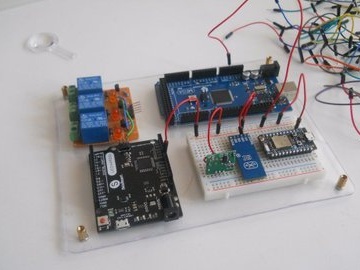
Gehäuse
Alles ist einfach. Zwei 18x15 cm große Plexiglasplatten glätten die Kanten mit Sandpapier. Mehrere Schrauben, um sie miteinander zu verbinden.
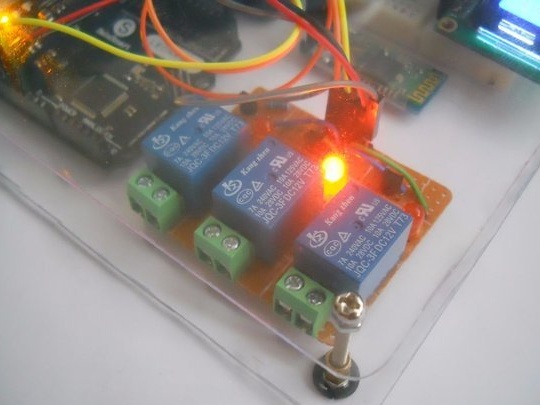
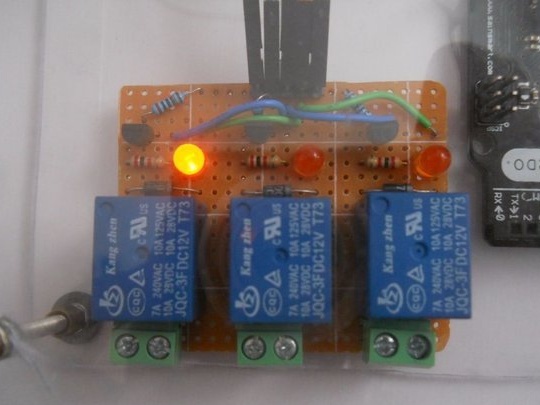
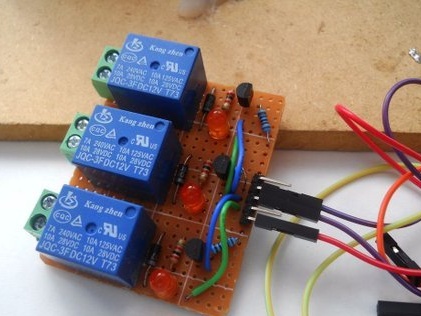
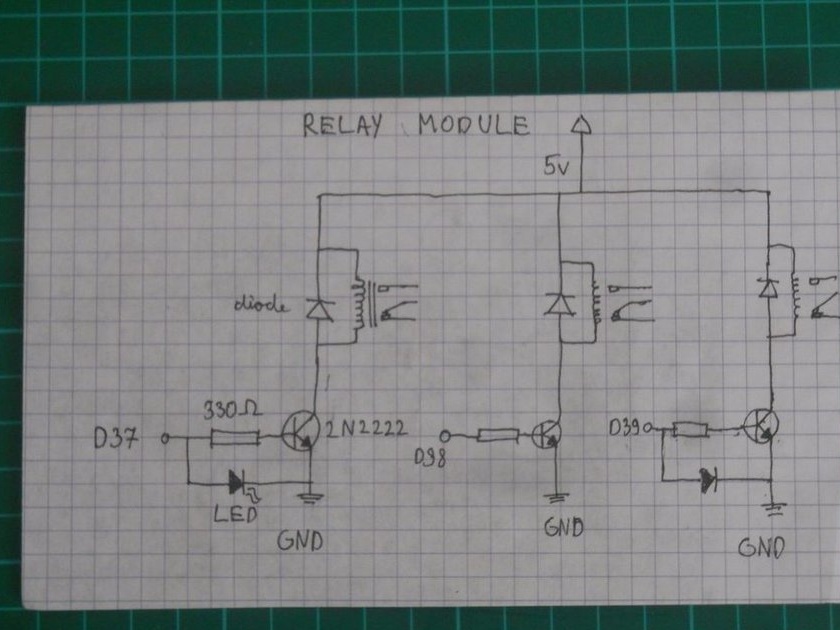
Relaisplatine
Sie benötigen folgende Angaben:
2n2222 Transistor (3 Stück)
Germaniumdioden (3 Stk.)
330 Ohm Widerstände (3 Stk.)
1 kOhm Widerstände (3 Stk.)
Relais 5 V (3 Stk.)
Stiftverbinder
Leiterplatte
Ein Bild sagt mehr als tausend Worte. Sehen Sie sich also das Diagramm an, wie Teile auf einer Leiterplatte verbunden werden.
Wenn der Signalausgang von einem Arduino stammt, wird das Relais eingeschaltet. Der Transistor verstärkt das Signal, um eine ausreichende Leistung für das Relais bereitzustellen. Wir werden 37-38-39 Kontakte verwenden, um die HIGH LOW-Pegel jedes Relais zu steuern.
Um Teile auf einem Plexiglasgehäuse zu installieren, verwendete der Autor doppelseitiges Klebeband. Er hält so ziemlich die Details.
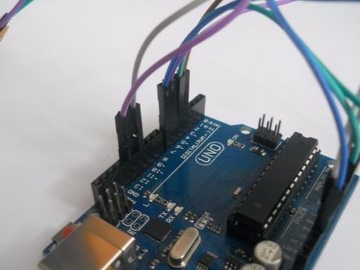
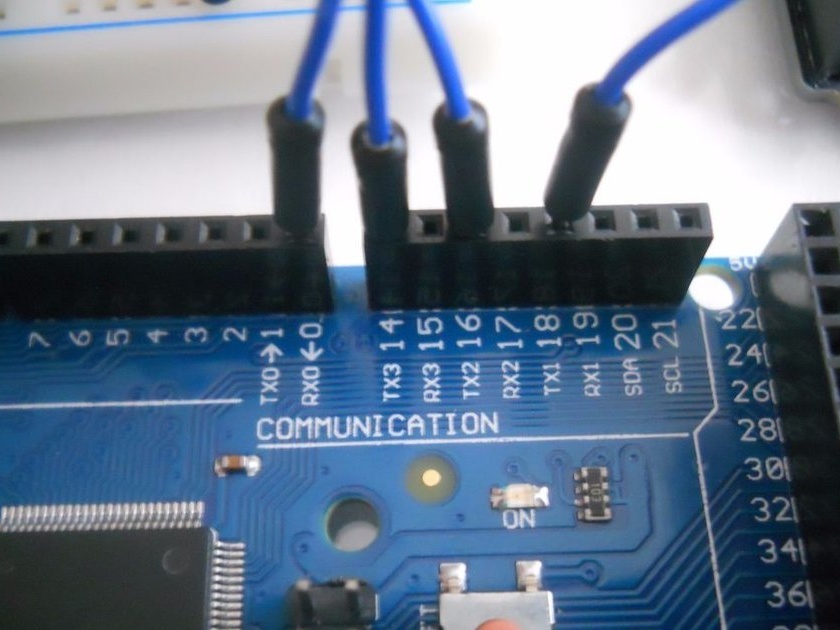
Dies ist ein Software-Server, daher ist es nicht so schwierig, eine Schaltung herzustellen. Sie müssen nur die Mikrocontroller einschalten und eine Verbindung zwischen ihnen herstellen. Die IR-LED ist an Pin D3 und das Relais an 37-38-39 angeschlossen. Der D16 Arduino Mega geht an das RX Photon und der D18 an den RX Leonardo.
Roboterverbindung
[2.02 Kb] (Downloads: 14)
Aber jetzt ist der Code fertig und funktioniert, sodass Sie nur noch Ihre Mikrocontroller herunterladen müssen. Laden Sie die .ino-Datei herunter oder kopieren Sie den Code, fügen Sie ihn in Ihre IDE ein und verwenden Sie ihn. Der Code für Particle Photon muss über die Browser-IDE heruntergeladen werden. Registrieren Sie sich dazu unter. Und schließen Sie Ihren Laptop an Ihren Mikrocontroller an. Alles geschieht fast automatisch. Fügen Sie einfach Ihre Geräte-ID hinzu.
Stellen Sie vor dem Herunterladen der Codes sicher, dass nichts mit den RX / TX-Pins verbunden ist. Trennen Sie also Ihr Bluetooth-Modul von Mega und Mega von Leonardo und Photon.
[489 b] (Downloads: 15)

WebserverUm die IoT-Funktion (Internet of Things) zu seinem Projekt hinzuzufügen, hat der Autor einen Online-Datenlogger mit Particle Photon erstellt. Je nachdem, was Sie mit dem Gerät tun, erstellt Photon einen persönlichen Server und schreibt Daten in die Cloud.Dies mag zunächst einschüchternd erscheinen, aber stellen Sie sich vor, Sie können feststellen, ob Sie gestresst sind (Aufmerksamkeitsniveaus nehmen schnell zu und ab) oder lohnt es sich schlafen zu gehen?
(Meditationsstufe ist immer über 80)
. Dieser Webserver kann Ihnen helfen, gesünder zu leben.
Browser-Codierung
Partikel hat auch ein Online-Panel, in dem Sie alle Daten mit "Particle.publish ();" veröffentlichen können. Syntax. Symbolleistenentwickler haben den Benutzern viel Zeit gespart.
