

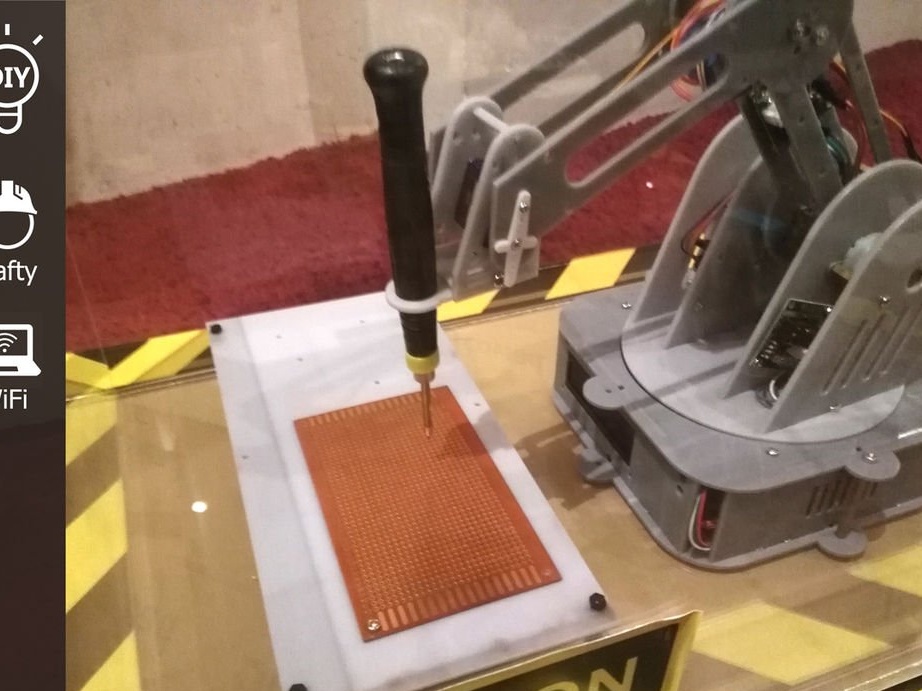

Leider wird dieses Material nicht zu einem vollwertigen Artikel führen, daher habe ich beschlossen, es in die "Tipps" aufzunehmen, vielleicht braucht jemand das Material. Der Artikel erklärt, wie man lötet elektronisch Komponenten auf einer Leiterplatte unter Verwendung eines automatisierten Manipulatorarms.
Die Idee des Projekts kam dem Meister zufällig in den Sinn, als er verschiedene Möglichkeiten von Robotermanipulatoren untersuchte und dann entdeckte, dass es mehrere gibt, die den Bereich des automatisierten Schweißens und Lötens durch einen Robotermanipulator abdecken.
Werkzeuge und Materialien:
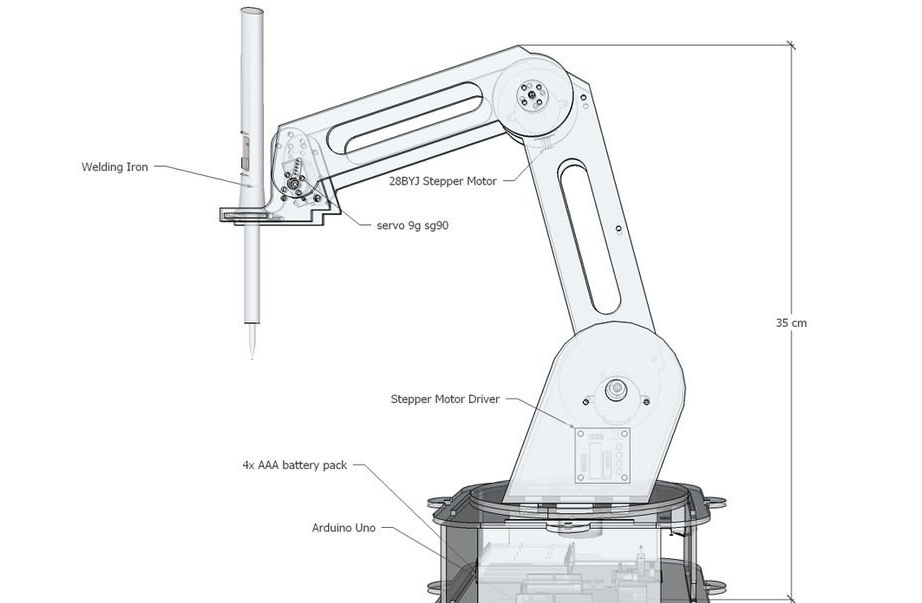
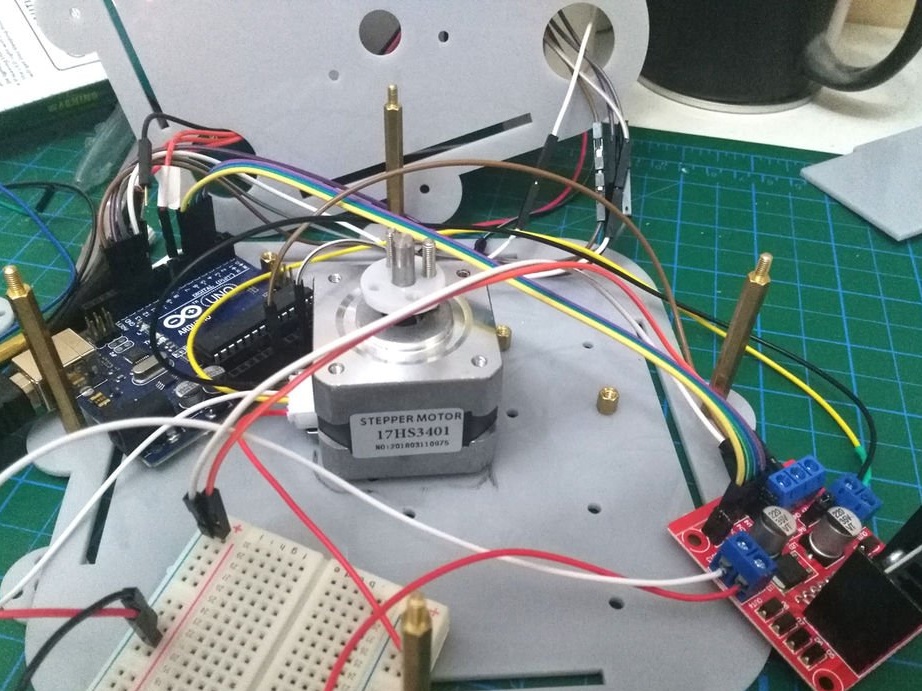
-Schrittmotor 28BYJ-48 mit Treibermodul ULN2003;
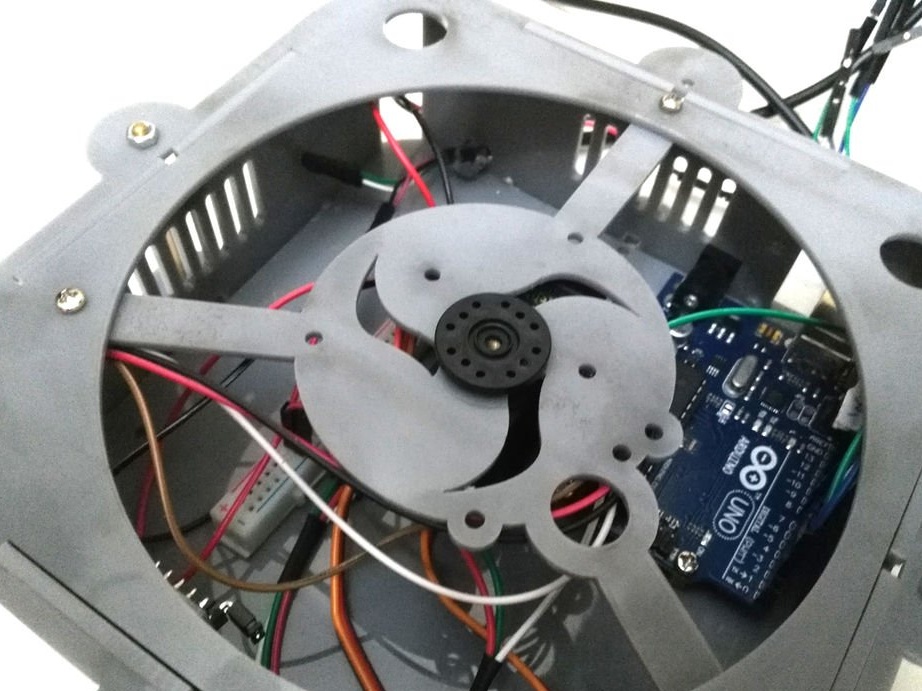
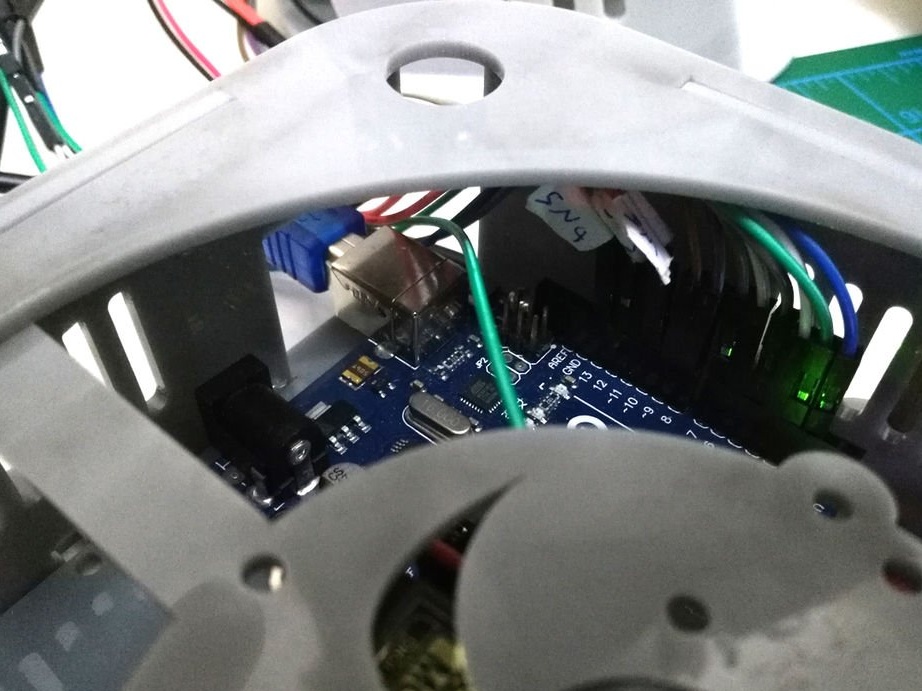
- Arduino Uno R3;
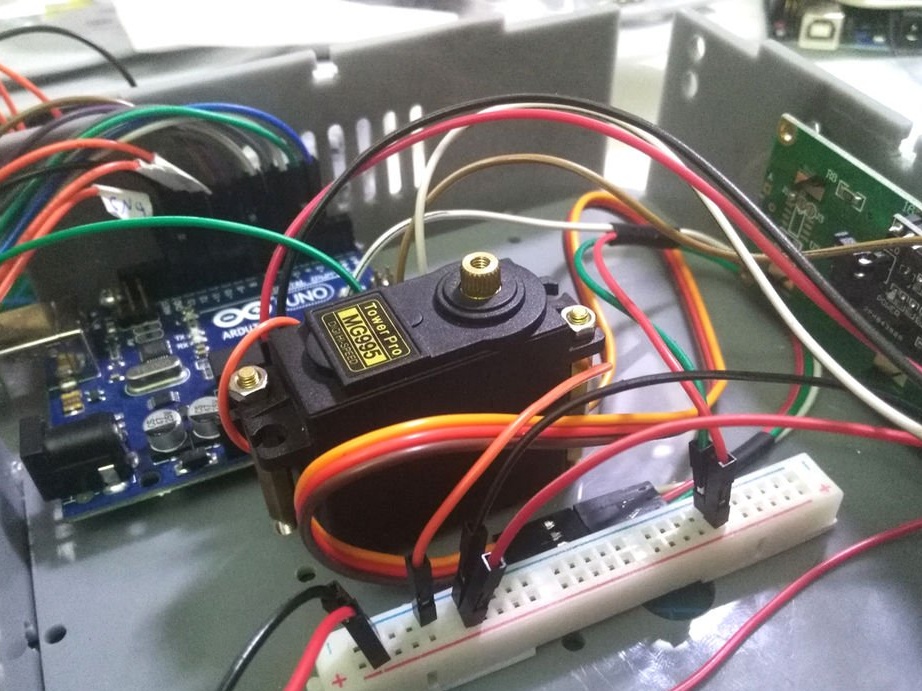
Servomotor MG-90S;
- LCD 1602;
-Board;
- Verbindungsdrähte;
- Absenkkonverter;
-Servox SC-1252MG $ Servoantrieb
-Fasteners;










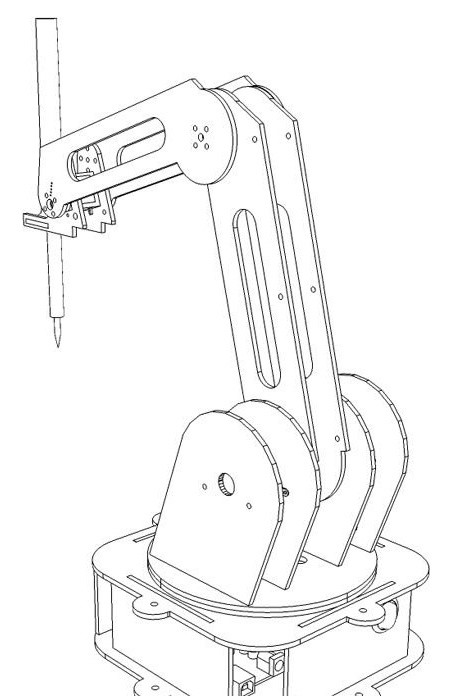
Der Assistent hat das Projekt zuerst entwickelt. Ein Teil der Details wurde auf einer CNC-Maschine mit einem Laser ausgeschnitten.
Nach dem Zusammenbau aller Teile wurden einige Probleme festgestellt:
1. Die Hebel waren zu schwer für kleine Schrittmotoren.
2. Seit das Modell bestand aus Kunststoff, die Reibung der rotierenden Basis war hoch und die Bewegungen waren nicht glatt.
Die erste Lösung bestand darin, einen größeren Schrittmotor zu kaufen, der Gewicht und Reibung standhält, und der Master baute die Basis für die Installation eines größeren Schrittmotors neu.
Das Problem verschwand jedoch nicht, und dann änderte der Master das grundlegende Design vollständig und installierte einen Servomotor mit einem Getriebe und Metallgetrieben.
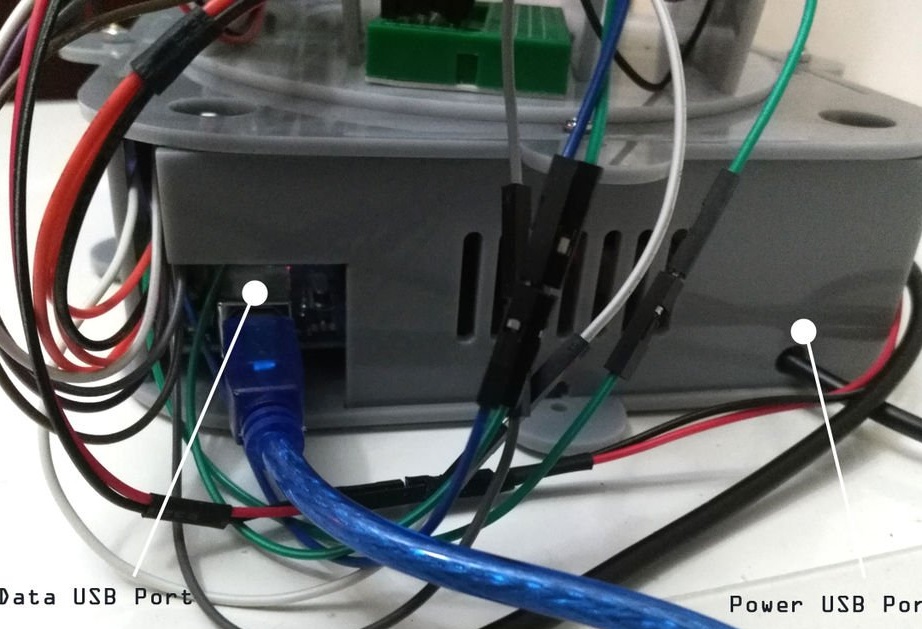
3. Die Spannung.
Der Arduino kann entweder über den Gleichstromanschluss (7-12 V), den USB-Anschluss (5 V) oder über den VIN-Pin der Platine (7-12 V) mit Strom versorgt werden. Die Spannungsversorgung über die 5-V- oder 3,3-V-Kontakte umgeht den Regler, und der Master hat beschlossen, ein spezielles USB-Kabel zu kaufen, das 5 V von einem PC oder einer beliebigen Stromquelle unterstützt.

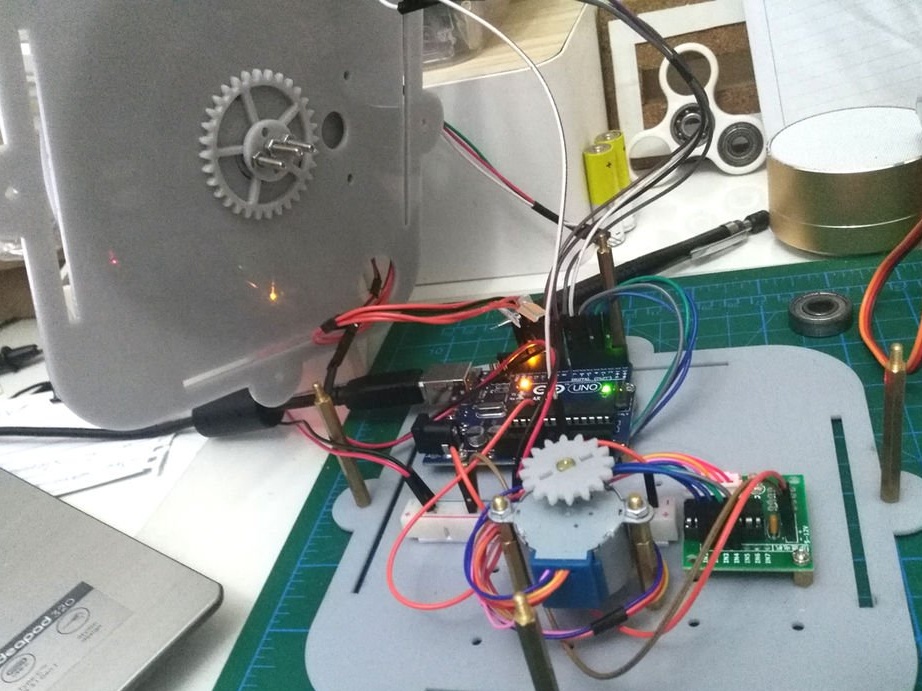
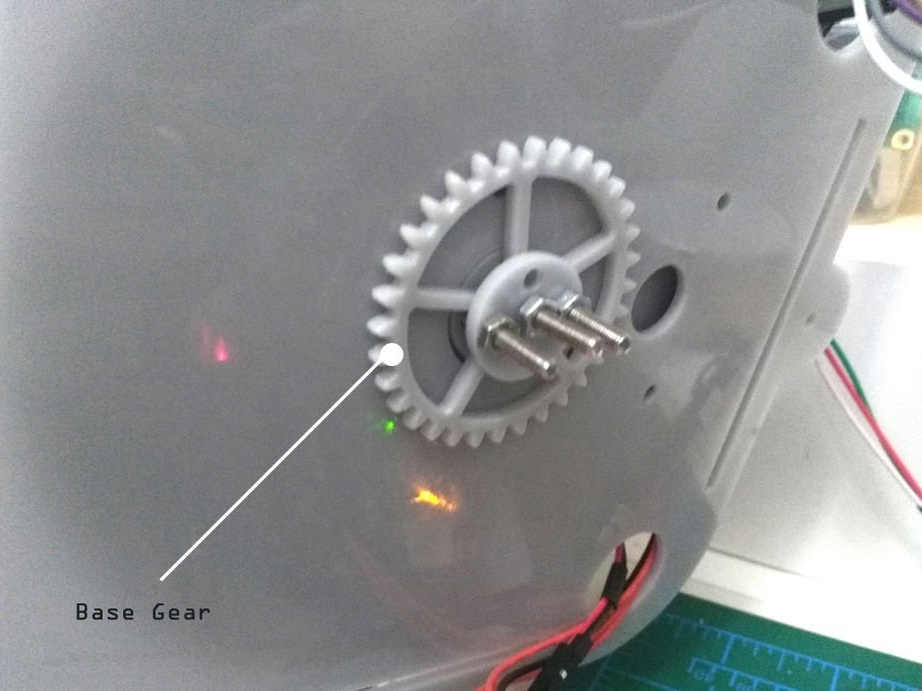

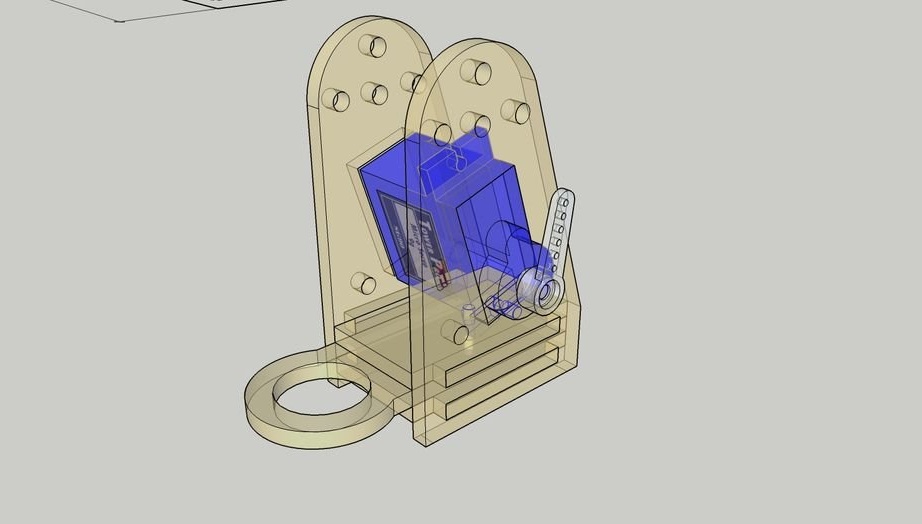
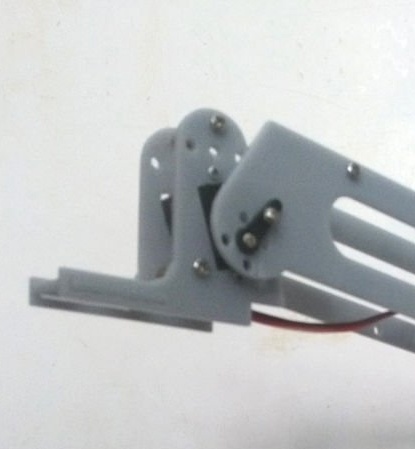
Nach einigen Änderungen änderte der Master das Design des Modells, reduzierte die Größe der Halterungen und bohrte ein geeignetes Loch für das Servomotorgetriebe, wie auf dem Foto gezeigt.

Um den Lötkolben zu halten, fertigte der Master eine spezielle Halterung an.Für einen ordnungsgemäßen Betrieb wird ein Servomotor mit einem 180-Grad-Drehparameter benötigt.

Der Code kann unten heruntergeladen werden.

ProjectCodeFirst.ino
Höhepunkte der Herstellung des Gerätes sind im Video zu sehen.
Natürlich gibt es nicht genug Informationen, es gibt keine Schaltung, es gibt keine Dateien für die CNC, es gibt keine Beispiele für das Gerät, aber es gibt eine gute Idee und vielleicht einen interessierten Assistenten, der auf dieser Idee basiert und ein voll funktionsfähiges Gerät herstellt.