Sein Gang ist einer echten Kakerlake sehr ähnlich. Beim Gehen schwankt es ein wenig und tritt selbstbewusst vor. Die Kakerlake hat ein Minimum an komplexen Teilen und ist sehr einfach herzustellen.
1.Videotest
Das Video zeigt eine mechanische Kakerlake aus verschiedenen Winkeln während ihres Betriebs und ihrer Bewegung.
2. Eigenschaften und Merkmale.
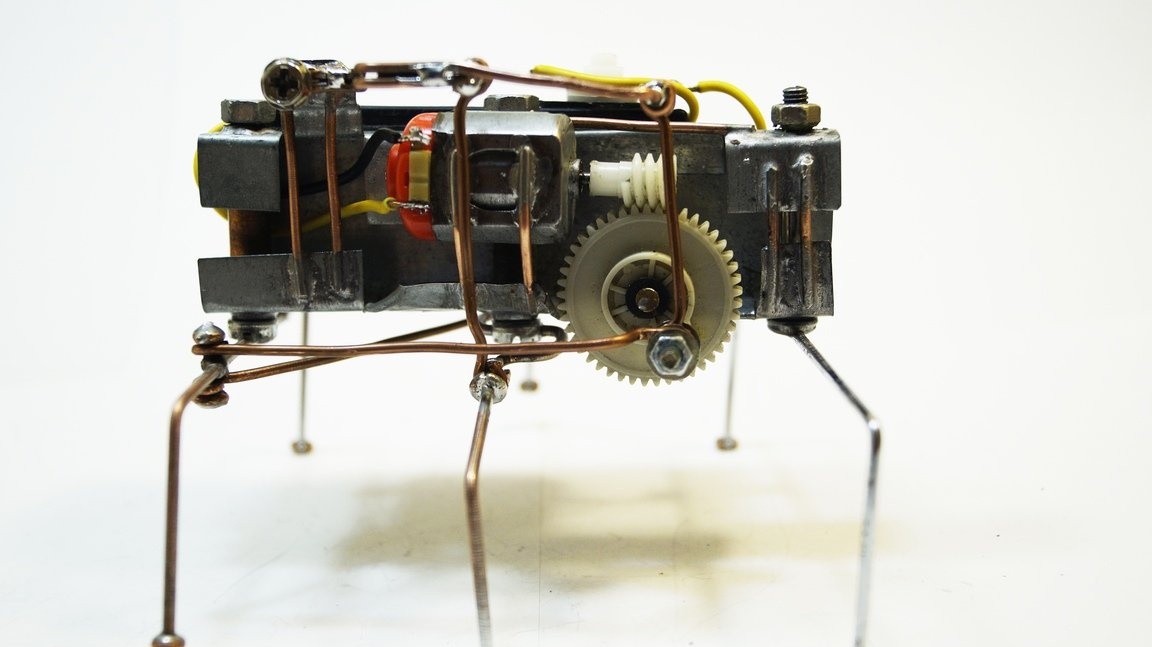
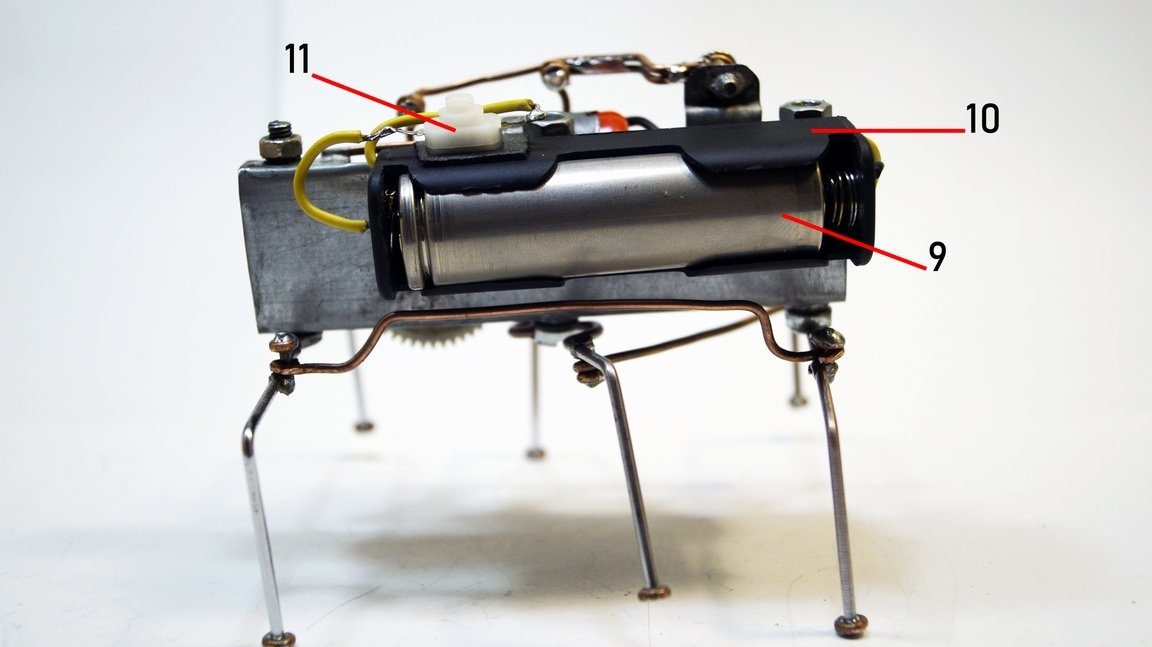
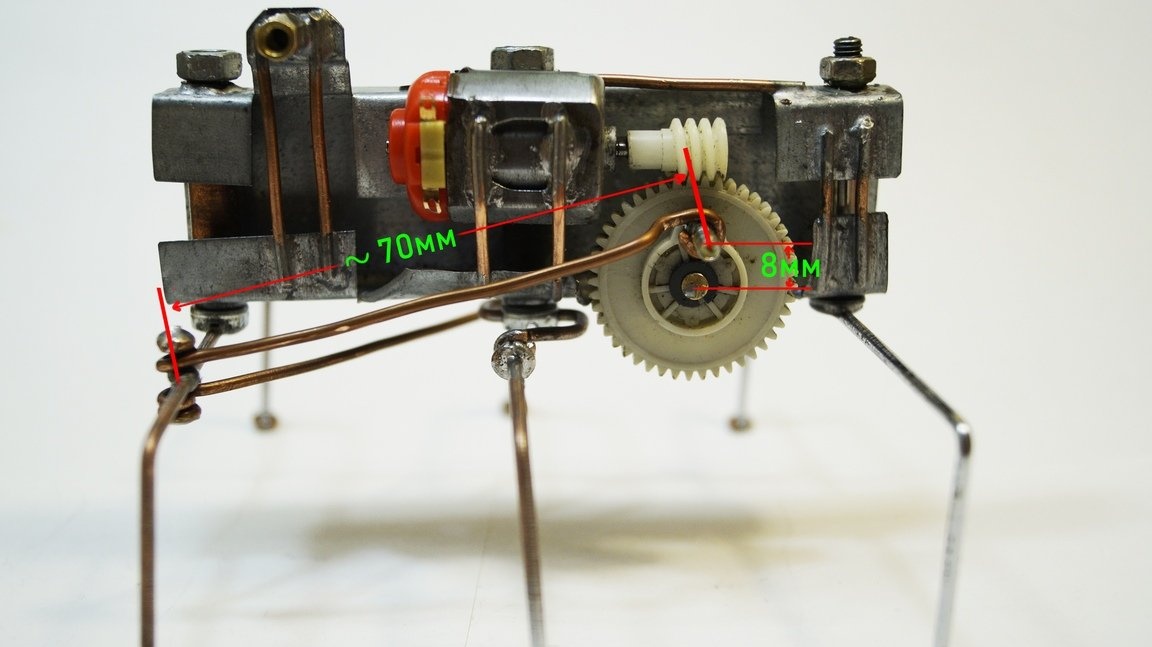
Auf einem Foto 1. Die mechanische Kakerlake ist in der Seitenansicht dargestellt. Auf einem Foto 2. Die Draufsicht wird angezeigt.
Foto 1.
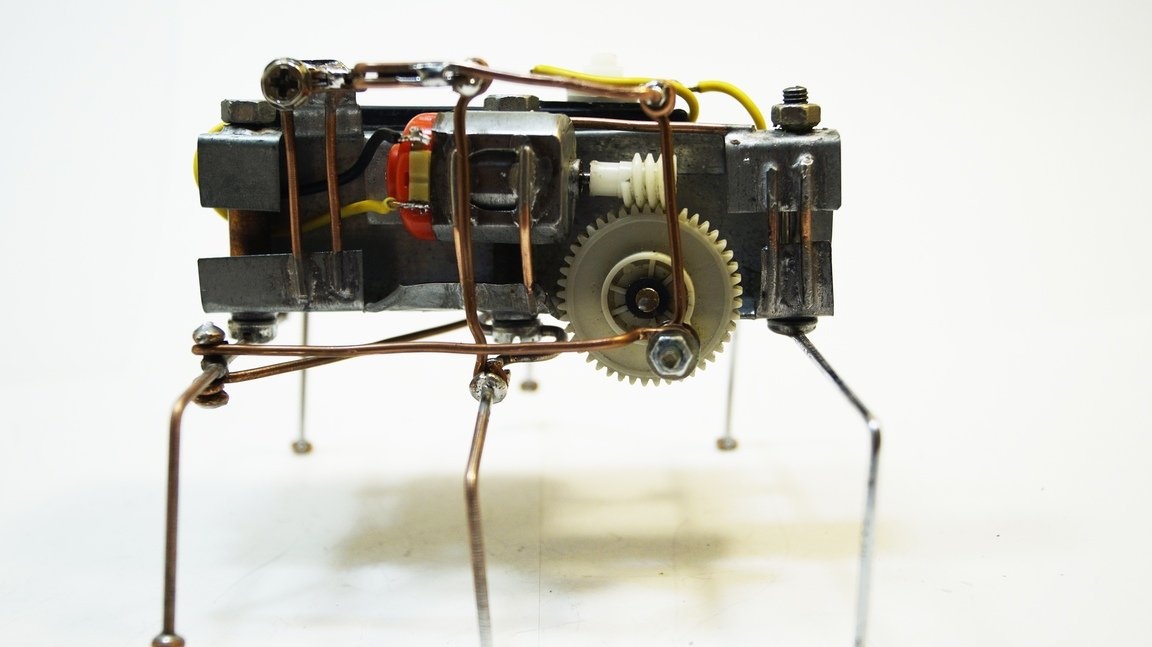
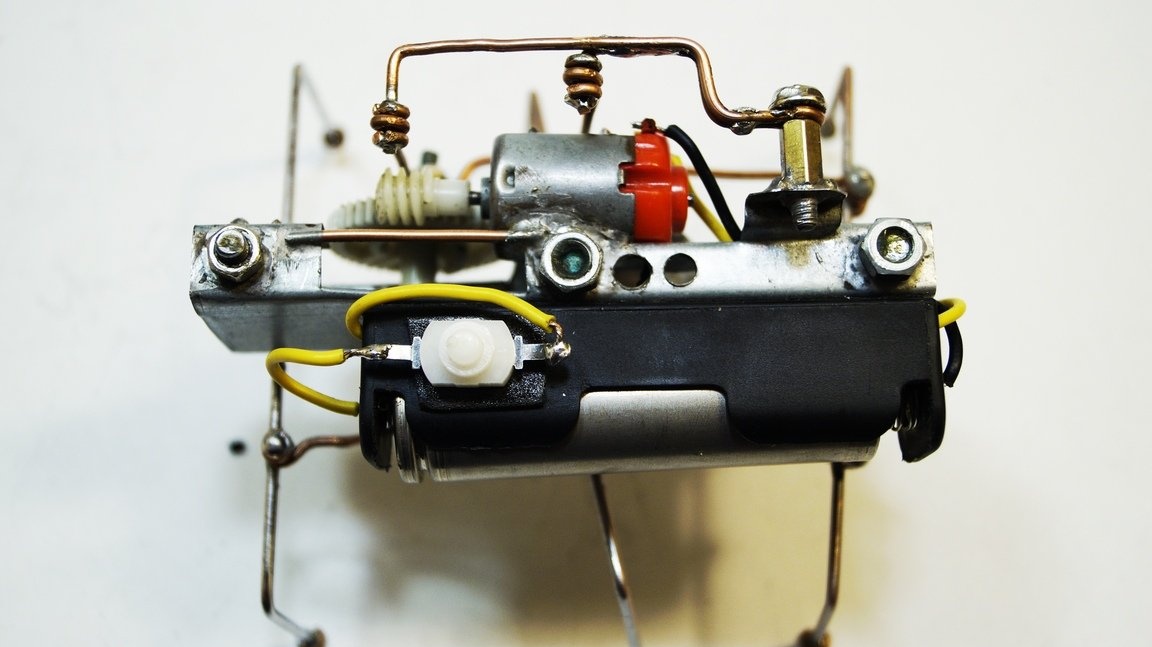
Foto 2.
DESIGN Als Rahmen wurde das Profil ppn-2 30X20 verwendet. Der Motor und andere Verbindungen wurden durch Löten montiert. Die Pfoten einer Kakerlake werden mit M6-Schrauben befestigt. Der Netzschalter und das Batteriefach sind auf doppelseitiges Klebeband geklebt. Ein Kupferkabel mit einem Querschnitt von 2,5 mm wurde als Traktion zum Antreiben der Beine einer Kakerlake verwendet.
MOTOR UND KURBELN. Der Motor und die Kurbelachse sind am POS-61 mit der Lötsäure ZnCl (Zinkchlorid) an den Rahmen gelötet. Um das Drehmoment zu erhöhen und die Größe zu verringern, wurde ein Schneckengetriebe verwendet.
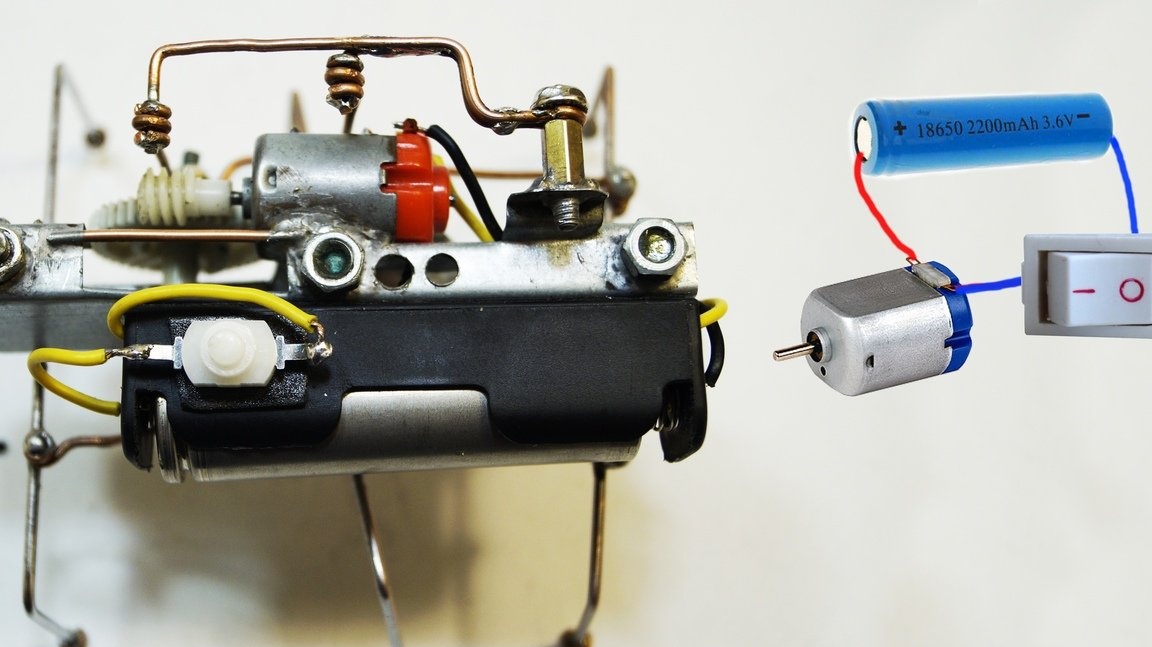
ERNÄHRUNG. Als Stromversorgung des Roboters wurde eine 18650-Batterie verwendet. Die Stromquelle beträgt 3,7 V.
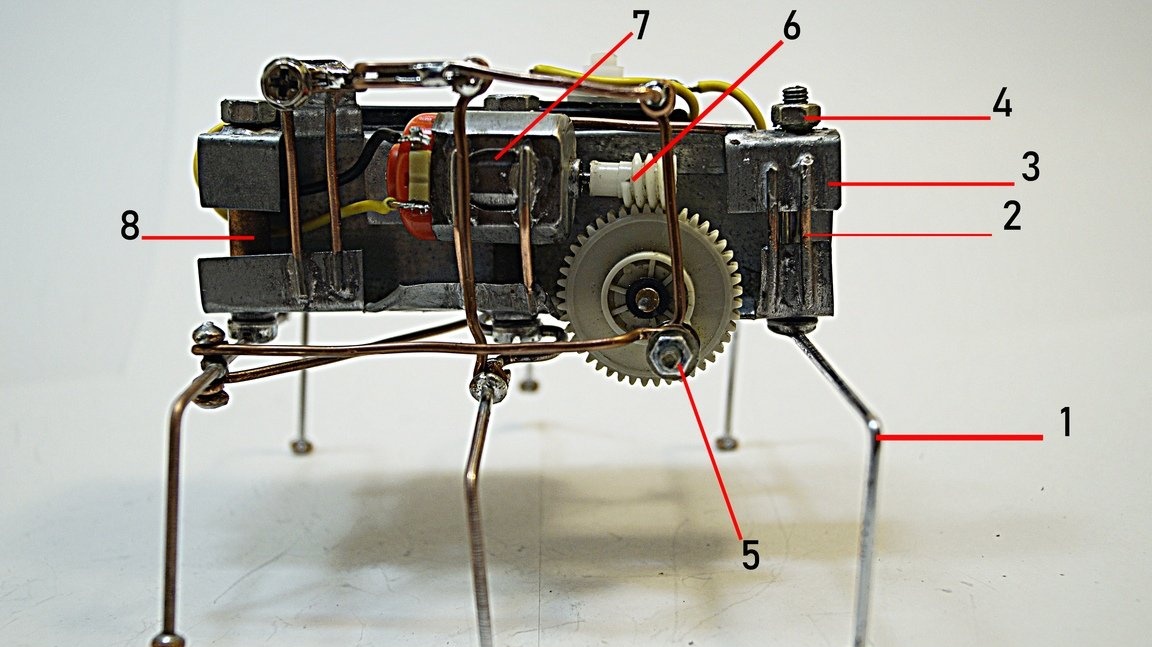
ROBOTERDESIGN-DETAILS
1. Pfoten einer Kakerlake.
2. Die Versteifung.
3. Der Rahmen.
4. Die Achse der Pfoten einer Kakerlake.
5. Kurbelmechanismus.
6. Schneckenantrieb.
7. Elektromotor F130 5 V.
8. Die Ärmelachse der Kakerlakenpfoten.
9. Batterietyp 18650, 3,7 V.
10. Batteriefach.
11. Netzschalter.
3. Das Prinzip der Arbeit.
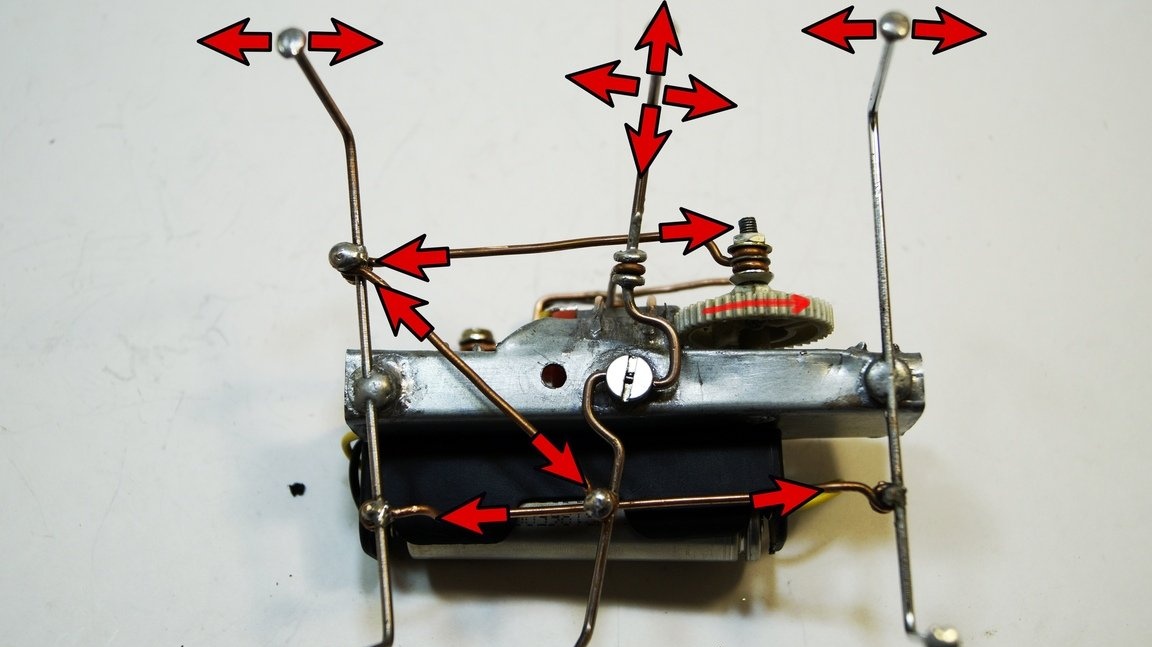
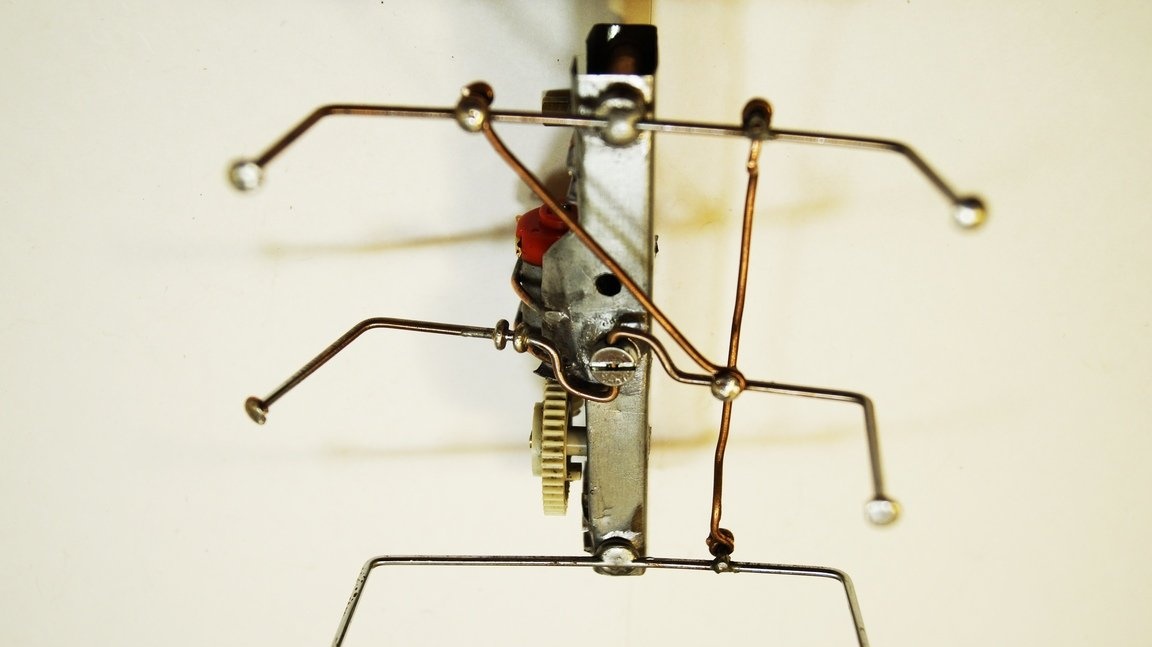
Auf einem Foto 3. 4. Das Funktionsprinzip mechanischer Teile einer Kakerlake ist dargestellt. Es ist zu beachten, dass sich die Vorder- und Hinterbeine des Roboters horizontal und die Mittelbeine vertikal und horizontal bewegen.
Der Elektromotor wird über den Schlüssel mit Strom versorgt, der Motor dreht den Kurbelmechanismus. Die Kurbel treibt die Vorderpfote durch Traktion bzw. von der Vorderpfote, der Schub drückt die Hinterpfote (sie bewegen sich synchron). Das mittlere Pfotenpaar ist kreuzweise mit dem ersten Paar verbunden (sie bewegen sich gegenphasig).
Um das mittlere Pfotenpaar vertikal zu bewegen, ist über dem Motor ein Hebel angebracht, der vom Kurbelmechanismus in Bewegung gesetzt wird.
Foto.3
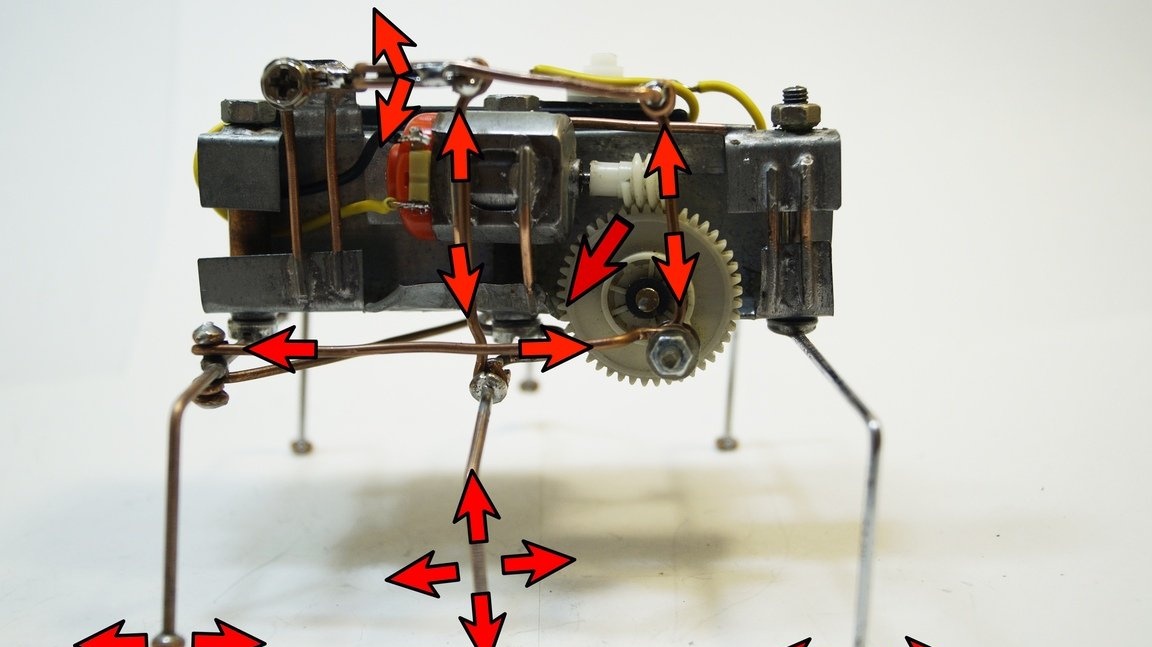
Foto.4
4. Materialien und Werkzeuge.
1. Lötkolben 50W.
2. Batteriefach.
3.Prysoy POS-61.
4. Ein Kupferdraht mit einem Querschnitt von 2,5 mm.
5. Lötsäure ZnCl (Zinkchlorid)
6. Elektromotor F130 5V.
7. Schere für Metall.
8. Schneckenantrieb.
9. Zangen.
10. Stahlrohr, Durchmesser 80 mm.
11. Wiederaufladbarer Akku 18650.
12.Profil PPN-2 30X20.
Und außerdem: (Netzschalter, doppelseitiges Klebeband, Befestigungsdraht)

5. Montageanleitung.
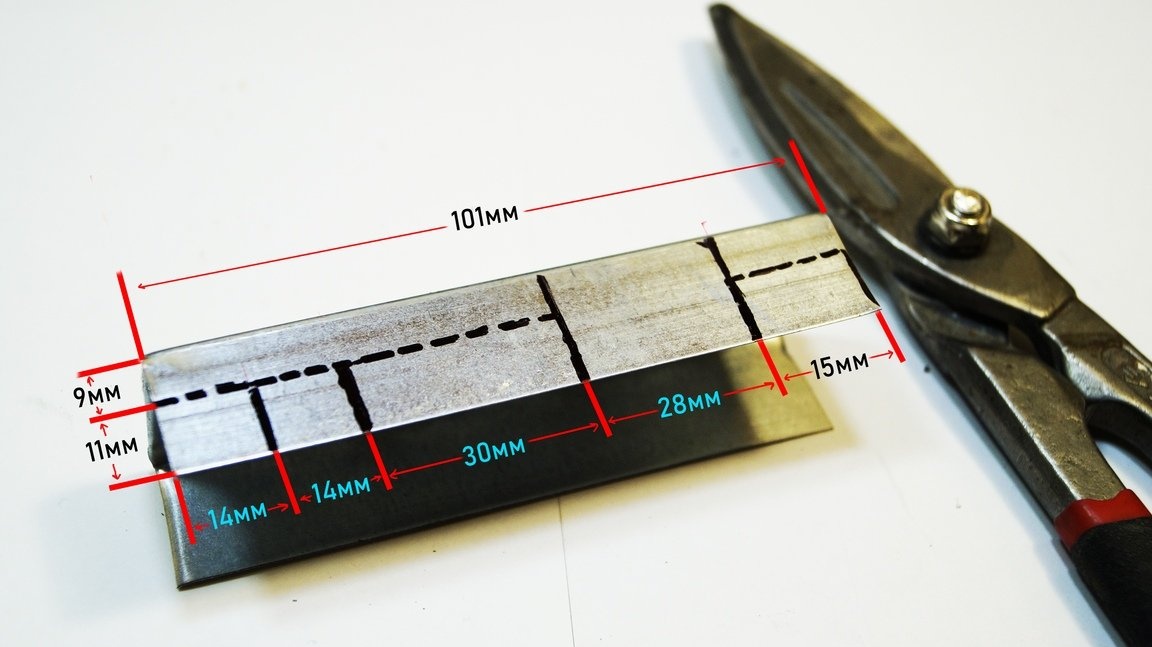
1.Machen eines Kakerlakenrahmens.
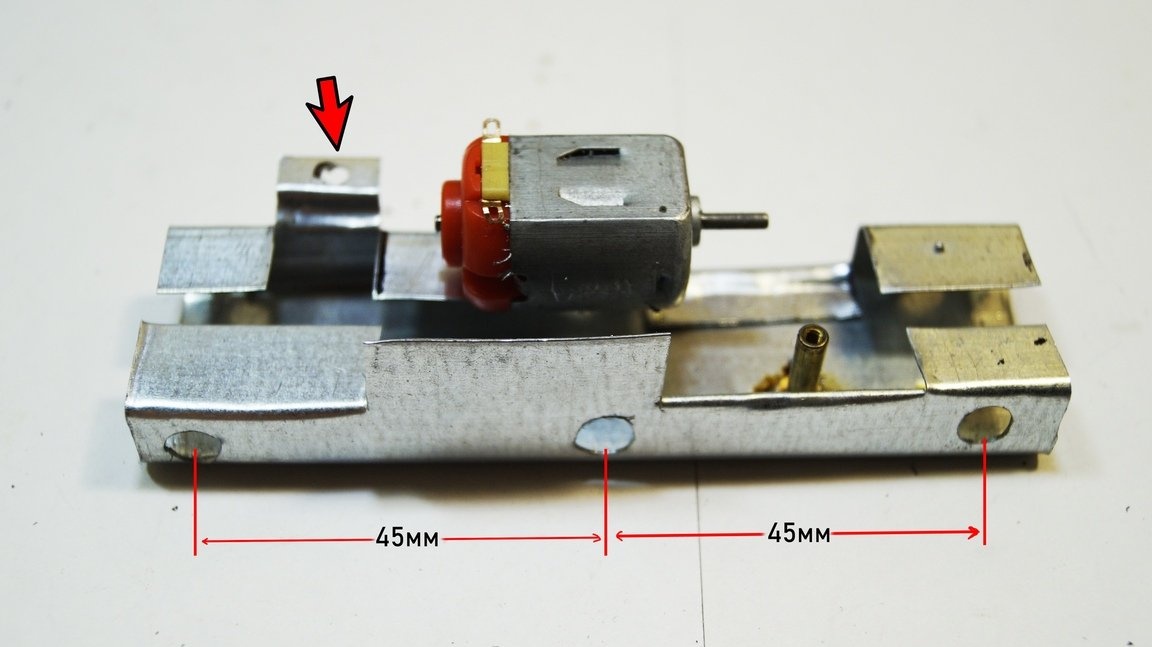
Zeichnen Sie das Markup auf das Profil, wie in Foto 5 gezeigt.
Foto 5.
Mit einer Metallschere schneiden und biegen wir das Werkstück mit einer Zange wie in Foto 6 gezeigt. Markieren Sie den unteren Teil wie in Foto 6 gezeigt. Biegen Sie das Profil mit einer Zange wie in Foto 7.
Foto 6.
Foto 7.
2. Elektromotor und Kurbelachse.
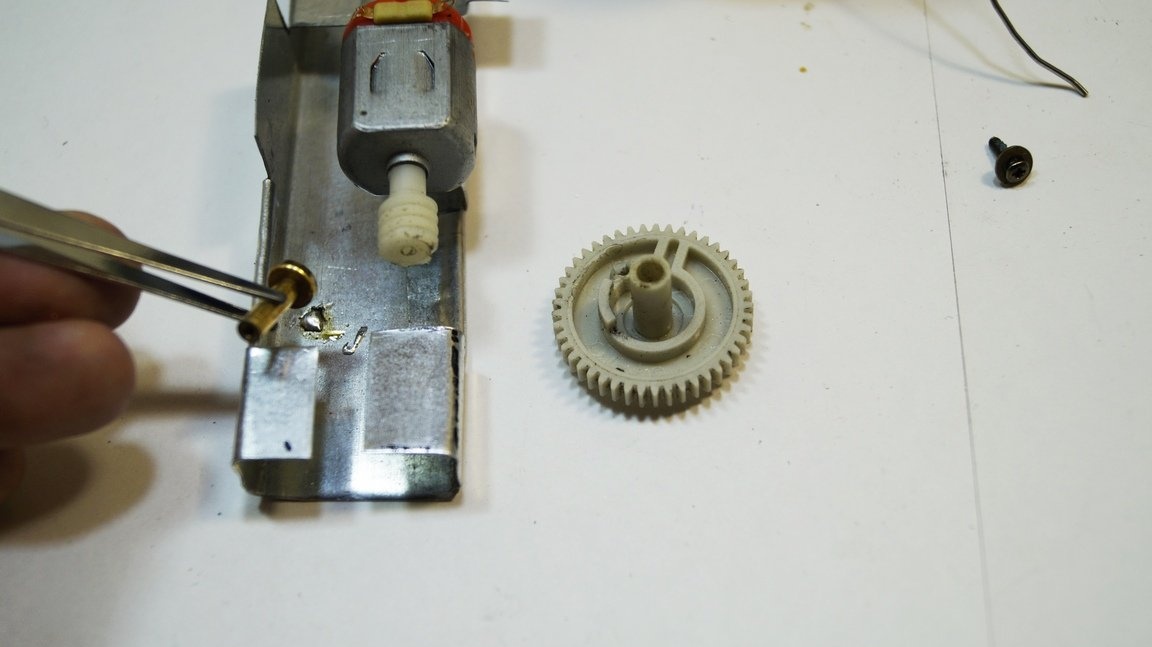
Der nächste Schritt ist das Löten des Elektromotors mit dem Rahmen. Der Motor muss vor dem Löten zerlegt werden. Wir überfluten das Motorgehäuse und den Rahmen mit einem Lötkolben Foto 8.
Wir löten den Körper des Elektromotors und den Rahmen zusammen, erwärmten die Teile gut mit einem Lötkolben und drückten sie aneinander. Foto 9. !!! ACHTUNG, DETAILS WÄRME VIEL BEHEIZT !!!
Foto 9.
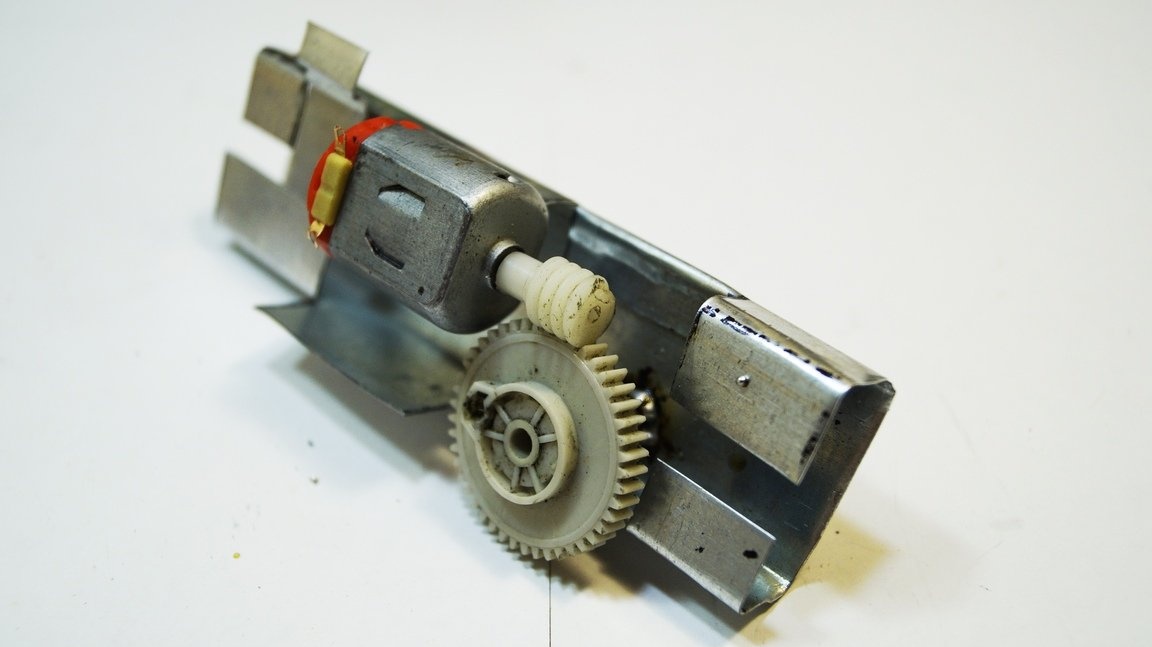
Den Elektromotor zurücksetzen. Wir löten die Kurbelachse an Ort und Stelle, dies geschieht experimentell. Das Schneckengetriebe sollte gut zusammenpassen, die Zahnräder sollten nicht schief sein. Foto 10.11.
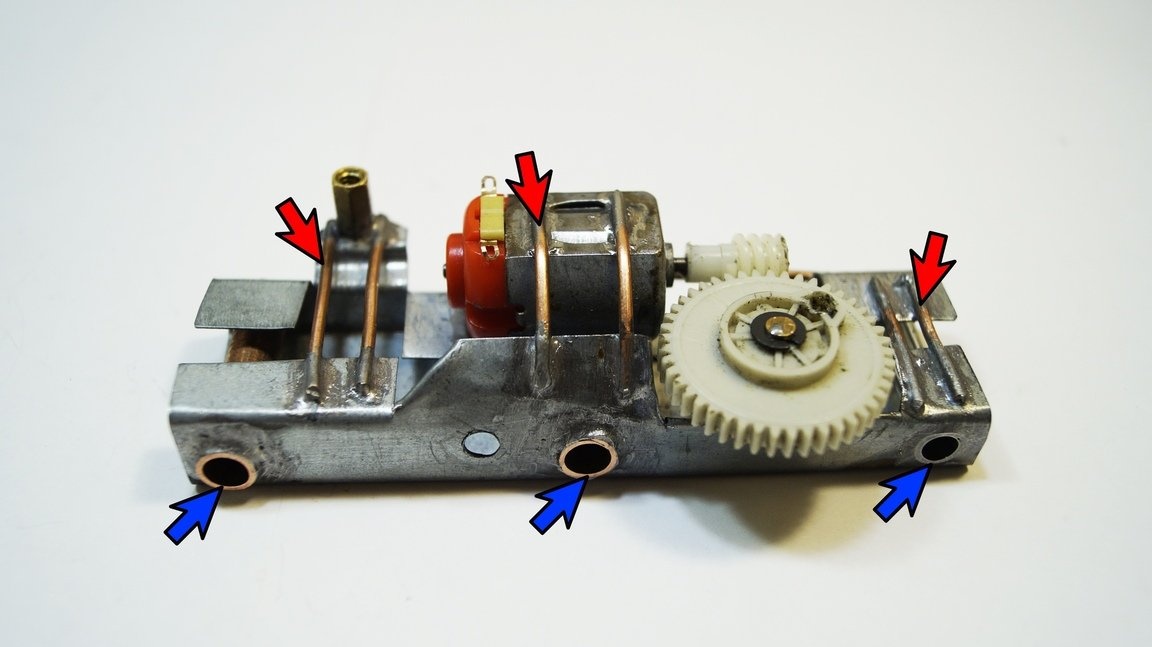
3. Löcher für die Beine einer Kakerlake.
Um die Kakerlakenpfoten am Rahmen zu befestigen, müssen Sie mit einem 8-mm-Bohrer Löcher bohren. Wir bohren mit einem 3,2-mm-Bohrer ein Loch in das Ohr hinter dem Elektromotor
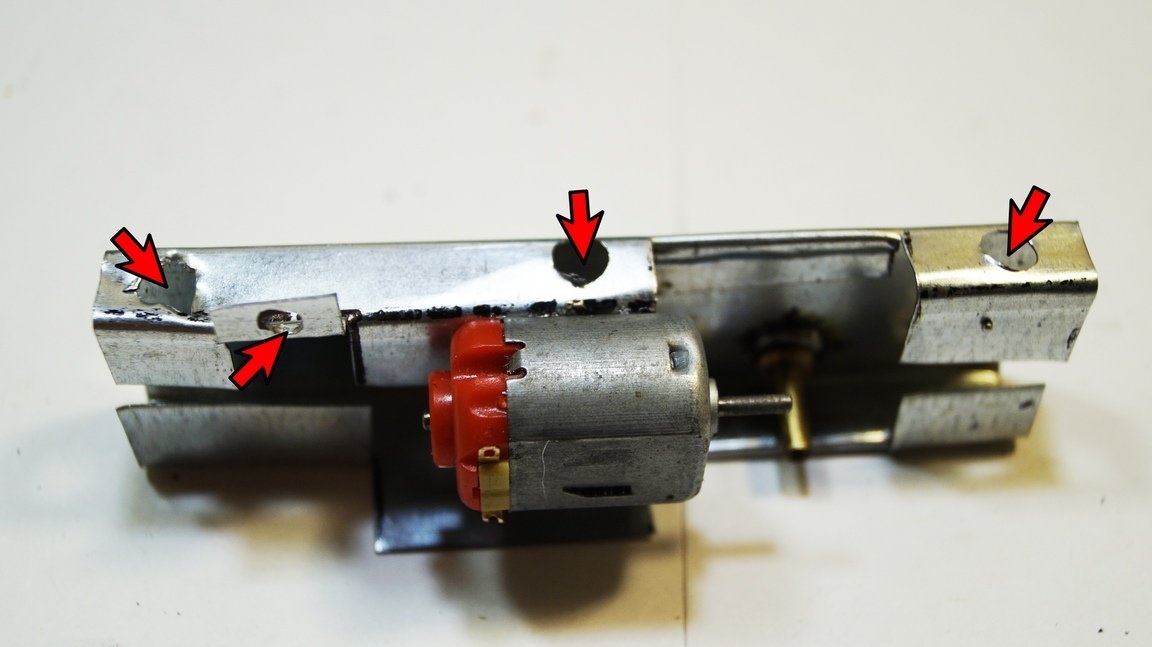
Wir löten auch eine Mutter in das Ohr hinter dem Elektromotor. Der Hebel, der für das Anheben der mittleren Pfoten entlang der vertikalen Achse verantwortlich ist, wird an dieser Mutter angebracht
Um das Rahmendesign zu verstärken, wurden Versteifungen mit einem 2,5 mm Kupferdraht verlötet.
8-mm-Buchsen wurden ebenfalls an die Befestigungspunkte der Kakerlakenpfoten gelötet. Foto 15.
4. Pfoten einer Kakerlake.
Als Kakerlakenpfoten wurde ein Metalldraht mit einem Durchmesser von 3 mm verwendet, der an den Kopf der M6-Schraube gelötet wird. Foto 16. Das mittlere Paar Kakerlakenpfoten wird anders hergestellt, ein Loch wird in den Schraubenkopf entlang des Drahtdurchmessers gebohrt. Der Draht ist in Form des Buchstabens „S“ gebogen, damit sich die Beine der Kakerlake vertikal bewegen können. Foto 17.
Foto 16.
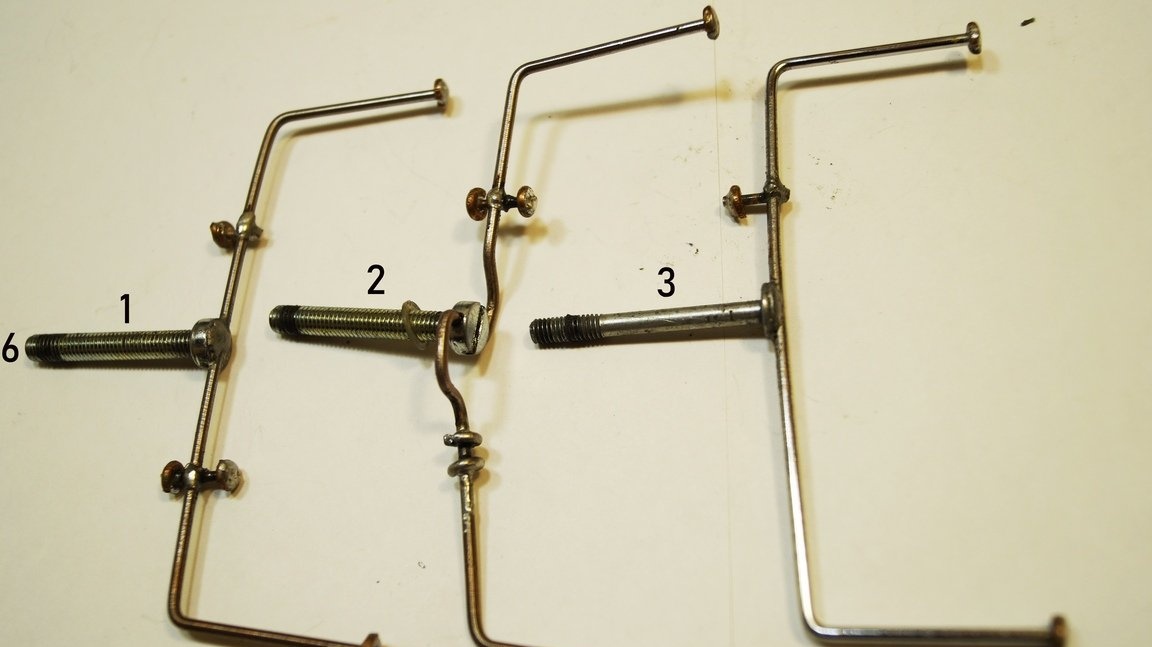
Foto 17.

Zur Befestigung der Stangen wird ein Kupferdraht mit einem 2,5 mm langen Abschnitt von 12 mm Länge an die Pfoten der Kakerlake gelötet, Kupferringe an die Enden gelötet. Die Stäbe bestehen aus Kupferdraht mit einem Querschnitt von 2,5 mm. Die Abmessungen sind ungefähr. Es ist ratsam, den Draht zu biegen, damit in Zukunft eine Anpassung entlang der Länge von Foto 18 möglich ist.
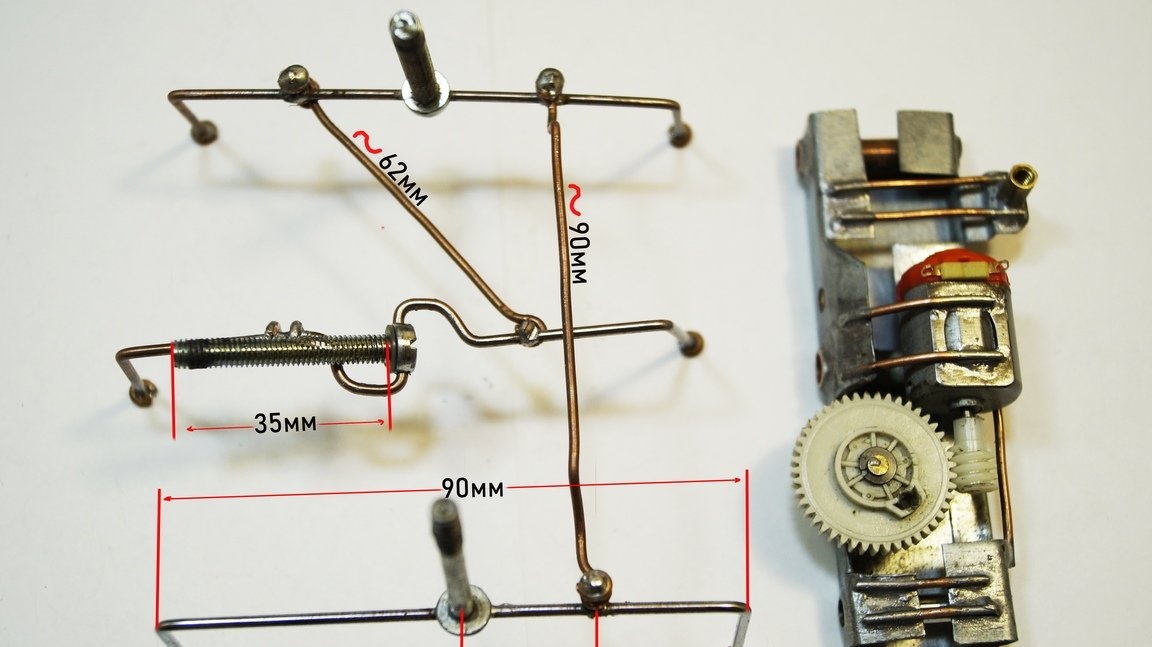
Foto 19 zeigt eine Unteransicht mit am Rahmen montierten Pfoten.
Wir stellen die Traktion vom Kurbelmechanismus zu den Vorderbeinen der Kakerlake her. Wir machen einen Schub mit einem Saum, um ihn einstellen zu können. Kurbelradius 8mm Foto 20.
Wir machen einen Hebel, um die mittleren Pfoten vertikal aus Kupferdraht zu bewegen. Foto 21.22.
Dies vervollständigt den mechanischen Teil der Kakerlake.
Foto 21.

Foto 22. Die Position der Pfoten an der unteren Position der Kurbelwellenwelle ist dargestellt.
Foto 22.

5. Der elektrische Teil.
Kleben Sie das Batteriefach mit einem doppelseitigen Klebeband auf den Kakerlakenrahmen. Kleben Sie den Netzschalter auf das Batteriefach. Wir löten alle Elemente von Foto 23.
Der Roboter - Die Kakerlake ist fertig !!!