
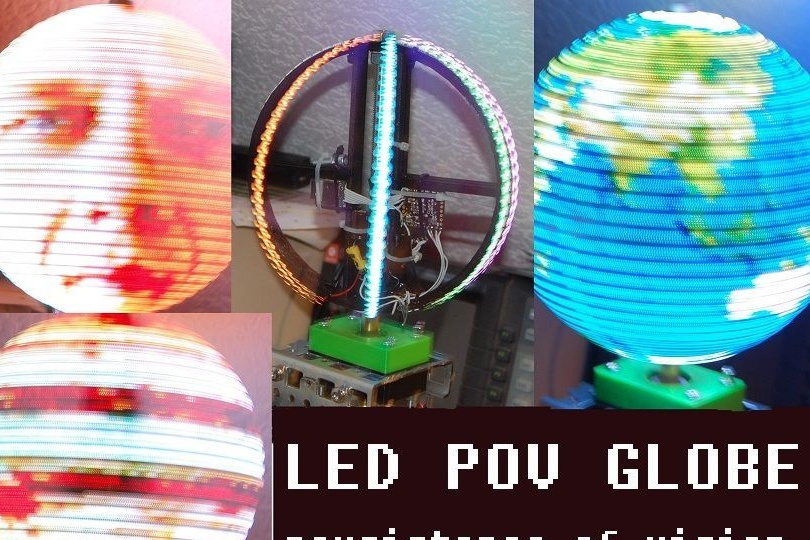
In diesem Tutorial geht es darum, wie man einen POV-Globus mit weniger baut. elektronisch Komponenten als andere ähnliche Geräte. Durch die Verwendung von RGB-LEDs mit integriertem APA102-Controller. Dies erspart Ihnen das Löten zahlreicher Drähte. Sie können mehr darüber lesen. Diese LEDs benötigen keinen zusätzlichen Treiber. Sie sind auf zwei Arten direkt mit dem Mikrocontroller verbunden. Dadurch können Sie die LEDs sehr schnell wechseln. Um ein stabiles Bild zu erhalten, wird die Synchronisation über SPI mit einer Frequenz von 10 MHz geliefert. Ein weiteres Plus dieses Designs ist die Verwendung einer Flash-Karte, die das Bild im BMP-Format speichert.
1 Erforderliche Materialien

Für die Achse des Globus benötigen Sie:

1. Bolzen mit M8-Gewinde und einer Länge von 250 mm
2. Mutter M8
3. Messinghülse 10 mm und 100 mm lang
4. Kunststoffscheiben 8 mm 2 Stück (STL-Dateien enthalten)
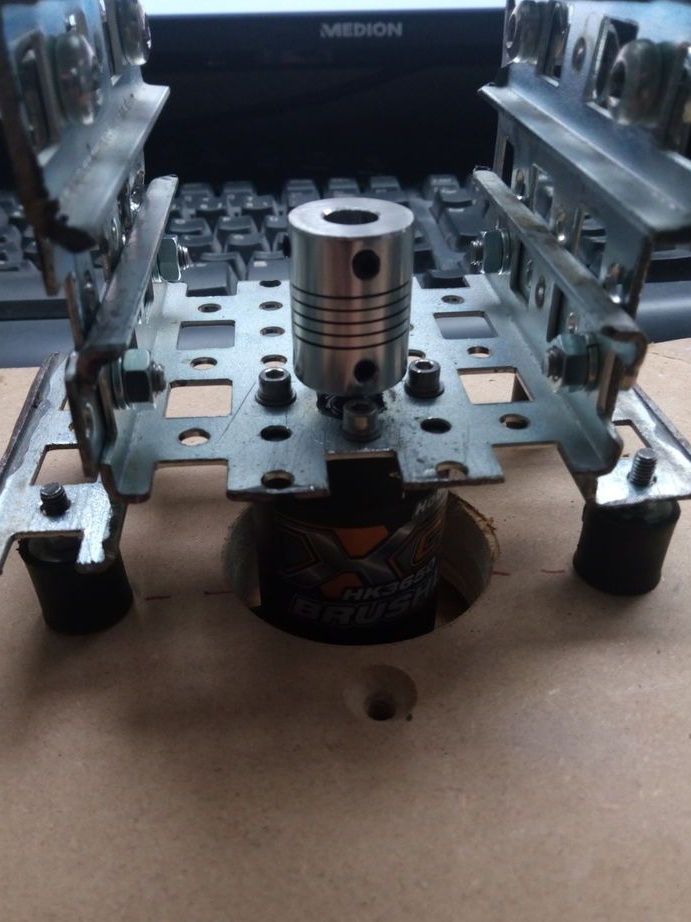
5. Kupplung für diejenigen, die den Schrittmotor NEMA 17 verwenden
Um den LED-Ring auf der Welle mit Strom zu versorgen, benötigen Sie
1. Kugellager 6300 (10x35x11)
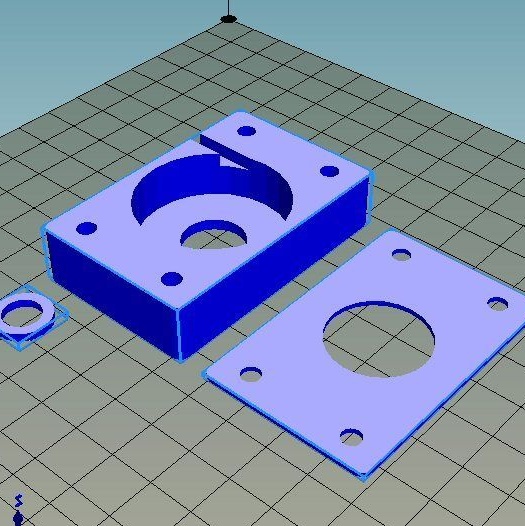
2. zwei Halterungen für Lager. Gedruckt auf einem 3D-Drucker oder aus Holz.
3. Vier M4x40-Schrauben mit Muttern
4. Spitzen an Drähten 2 Stk. 8 mm
5. mit einem Wellendurchmesser von 5 mm
6. 4 Schrauben M4 zur Motormontage
7. vielleicht ein Fan dazu.
Alternativ können Sie jeden Motor mit der richtigen Drehmoment- und Drehzahlregelung verwenden. Der in dieser Konstruktion verwendete Motor hat ein maximales Drehmoment bei einem Strom von 50 A, aber die maximale Stromaufnahme während des Betriebs beträgt nur 18 A.
Verwenden Sie zur Steuerung des Servomotor-Treibers
1.
2. zwei Tasten
Stromversorgung 12V für Motor und 5V für LEDs. Als Netzteil können Sie das alte Gerät vom PC aus verwenden. Sie können ein 12V / 5A-Netzteil kaufen und daran anschließen
Für den LED-Ring benötigen Sie:
1.664 LEDs 2 Streifen à 32 Stück
2. Kondensator 1000µF 10V
3. Hallsensor und Magnet
4. Der Pull-up-Widerstand 1k, 10k
5. Der Ring muss auf einem 3D-Drucker gedruckt werden oder ein Stück PVC-Rohr verwenden
6. Kunststoffbinder (100 mm)
7. Ein guter Kleber, der zusammenklebt und bei 2500 U / min nicht auseinander fliegt
Sie benötigen außerdem einen Parallax Propeller Microcontroller. Oder Sie können eine andere verwenden das Modell Controller, aber zusätzlich ein Board für Dieser Controller ist so einfach wie programmiert und blinkt Arduino. Sie benötigen einen USB-TTL-Adapter, um beide Controller zu programmieren.
Körper.
Gehäuse für hausgemacht Sie können alles hart genug nehmen. Das Wichtigste ist, dass Motor und Lager ausreichend zuverlässig gesichert werden können.
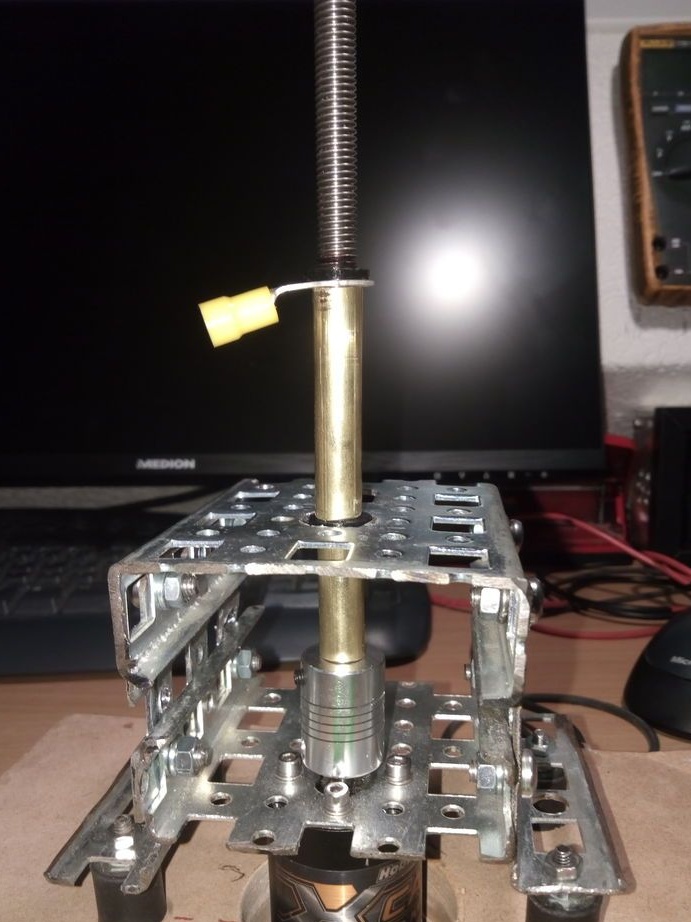
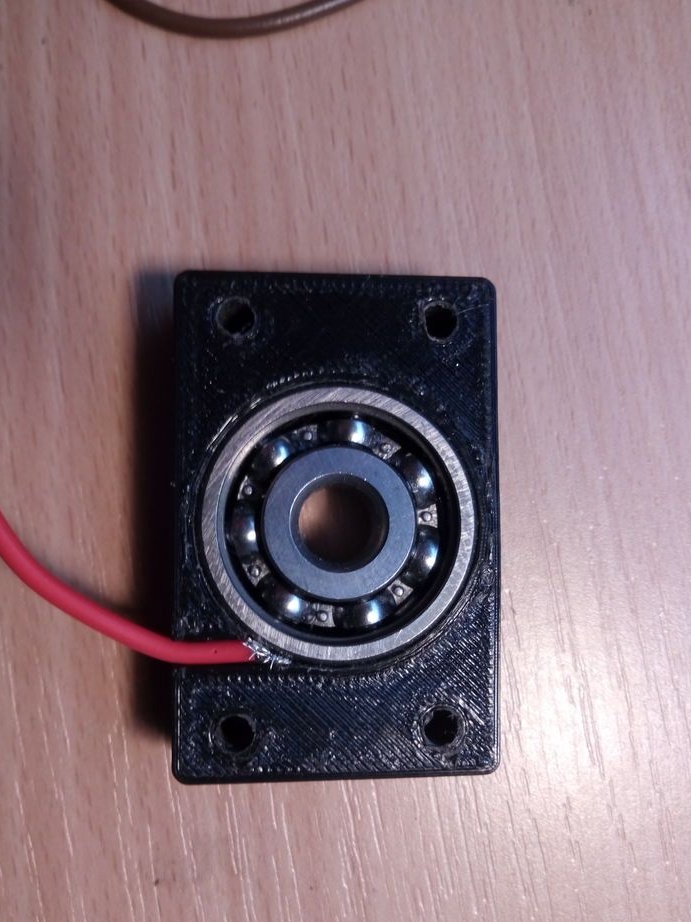
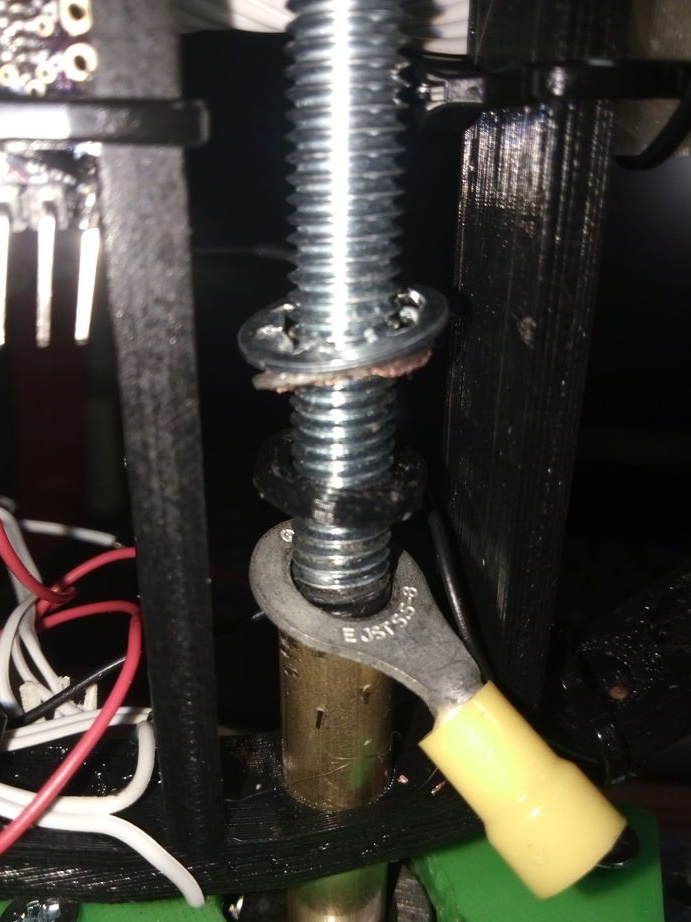
Für die Antriebswelle wird ein 250 mm langer Bolzen verwendet.Die Länge der Messingbuchsen beträgt 50 und 30 mm. Abhängig von Ringgröße und Wellenlänge. Die obere und die längere Hülse müssen vom Bolzen isoliert sein, da sie zur Stromversorgung der LEDs mit Plusstrom verwendet werden. Wickeln Sie dazu Klebeband auf eine Haarnadel oder verwenden Sie einen Schrumpfschlauch. Außerdem werden zwei Kunststoffscheiben benötigt. Die Hülse muss auf 8,5-9 mm gebohrt werden, sonst passt sie nicht. Die andere Hülse bildet zusammen mit der Stange einen negativen Kontakt.
Die Minuskraft wird in eine spezielle Nut gelegt und gegen das Lager in der Halterung gedrückt, das auf einem Drucker gedruckt werden kann. Klammer STL-Datei im Archiv.


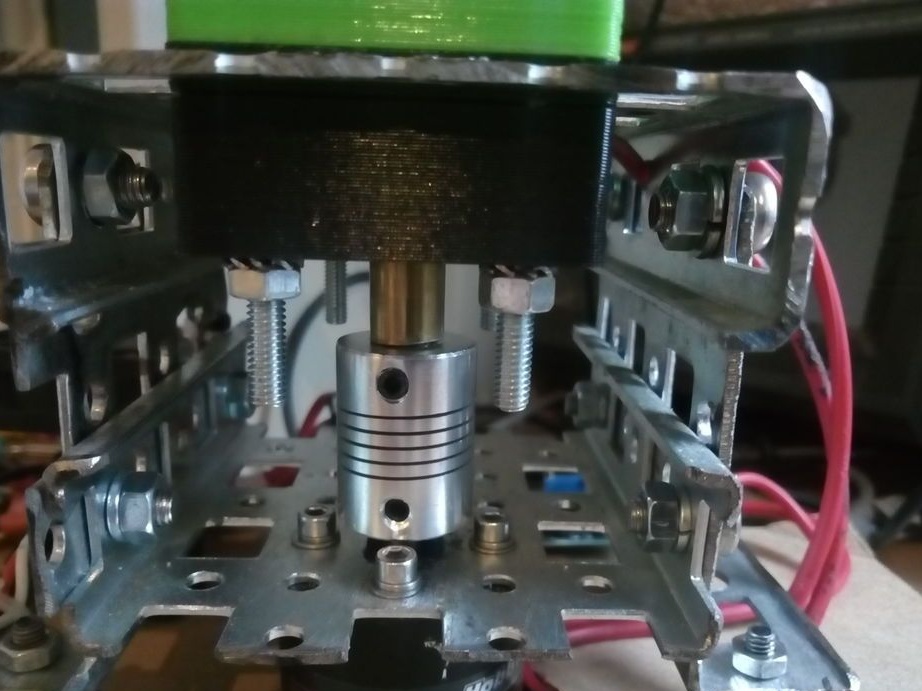
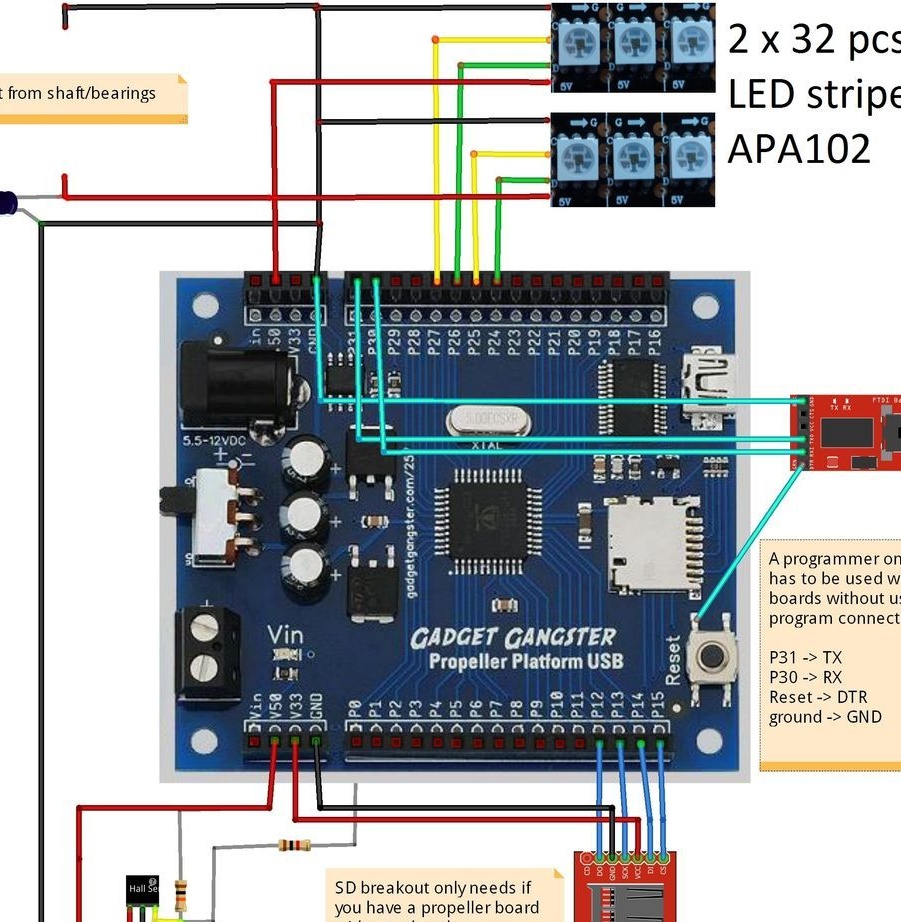
Jetzt müssen Sie den Elektromotor anschließen, wie in der Abbildung gezeigt.
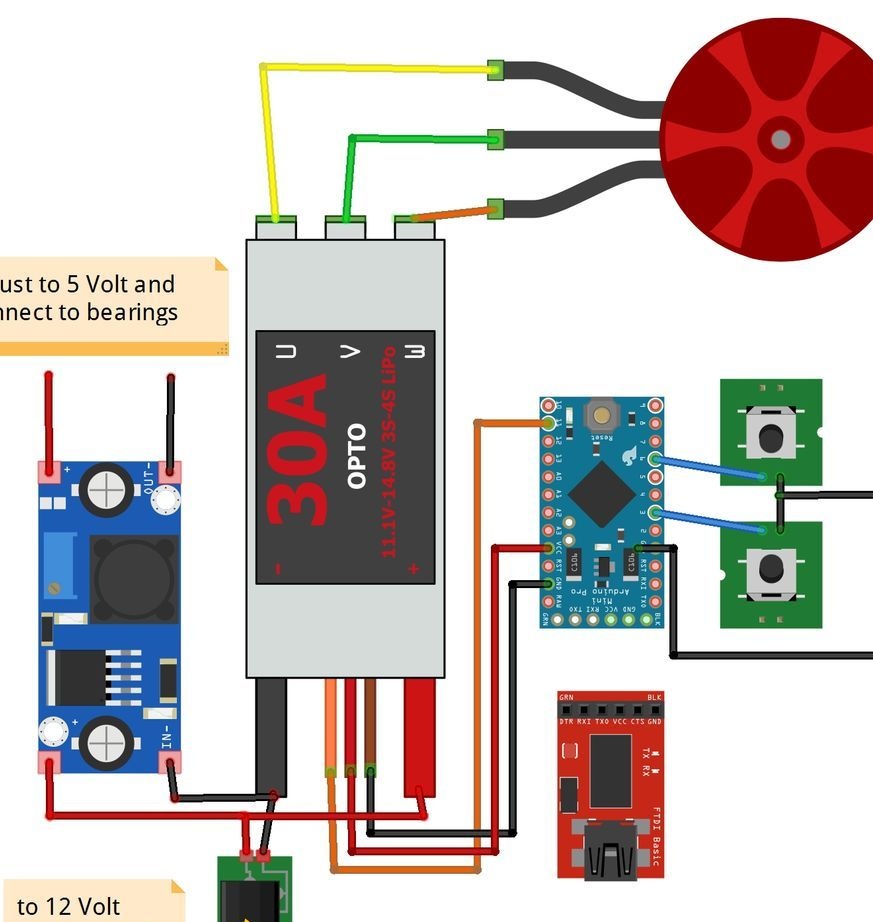
Zwei Schaltflächen im Diagramm dienen zum Einstellen der Geschwindigkeit. Wenn Sie die Stromversorgung einschalten, erhält der Regler einen Wert von 500 μs. Drücken Sie eine der Tasten, um den Motor einzuschalten. Die Skizze nimmt den Wert "StartPos = 625" an. Wenn Sie später die Geschwindigkeit anpassen, kann dieser Wert geändert werden. Drücken Sie die Taste zwei Sekunden lang und der Motor sollte abstellen.
Montage der Kernstruktur.
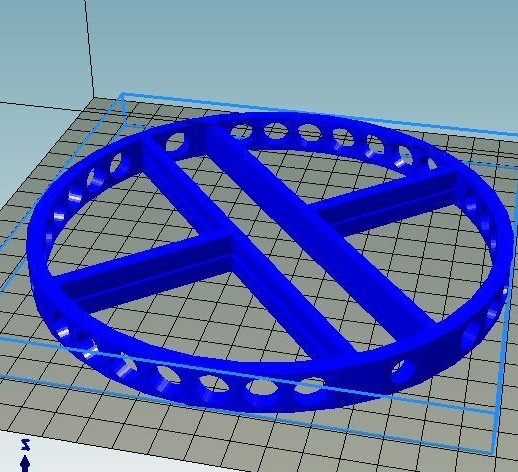

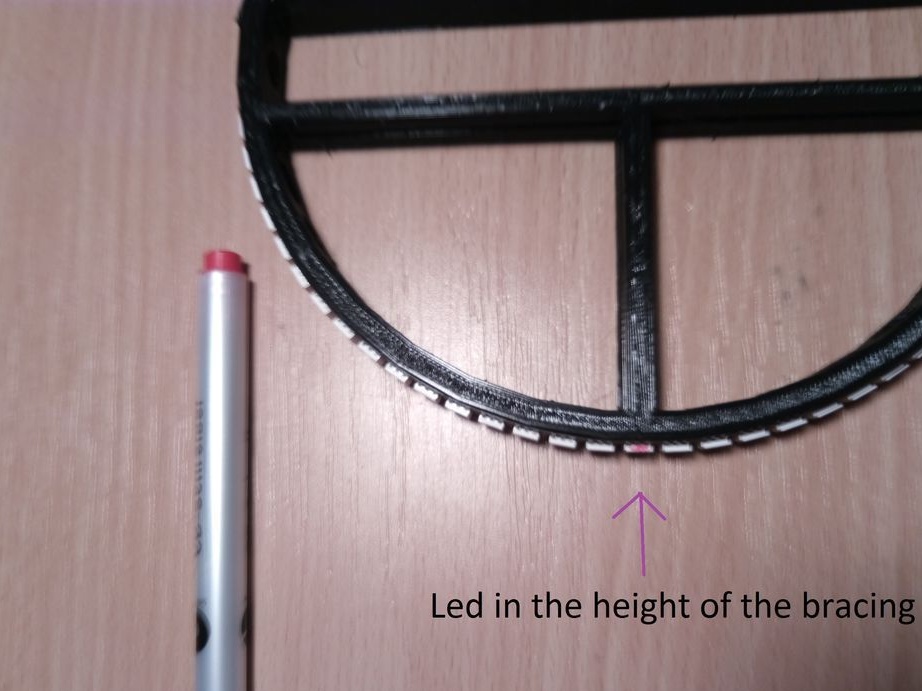
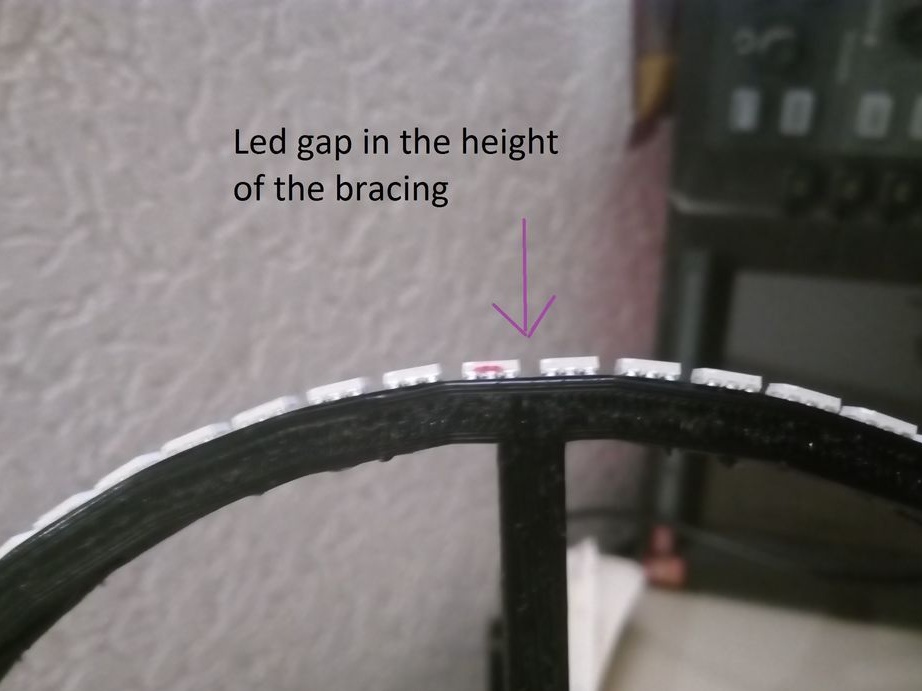


Drucken Sie dazu den Ring selbst aus der angehängten Datei. Der Autor hat viele Löcher darin gemacht, um das Gewicht zu reduzieren. Sie können ein Stück PVC-Rohr verwenden. Zwei Streifen mit 32 LEDs werden geschnitten. Zwei LED-Streifen bilden gerade und ungerade Linien. Ordnen Sie die Bänder so an, dass sich die LEDs eines Streifens zwischen den LEDs des anderen befinden, jedoch von hinten. Nachdem Sie das Band befestigt haben, können Sie die LEDs der Controller-Karte anschließen. Und dann müssen Sie die gesamte Baugruppe ausbalancieren.
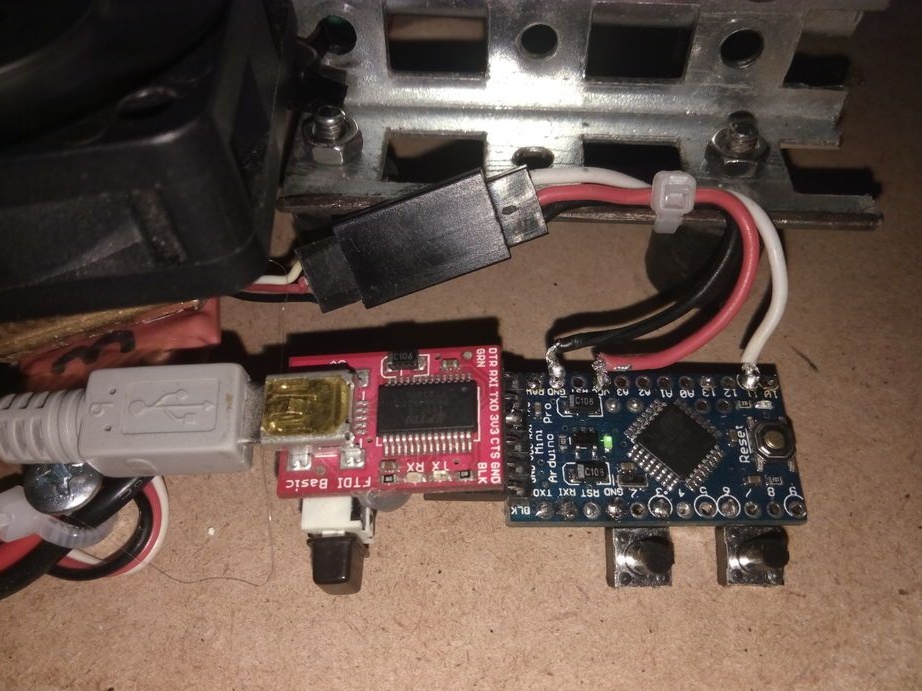
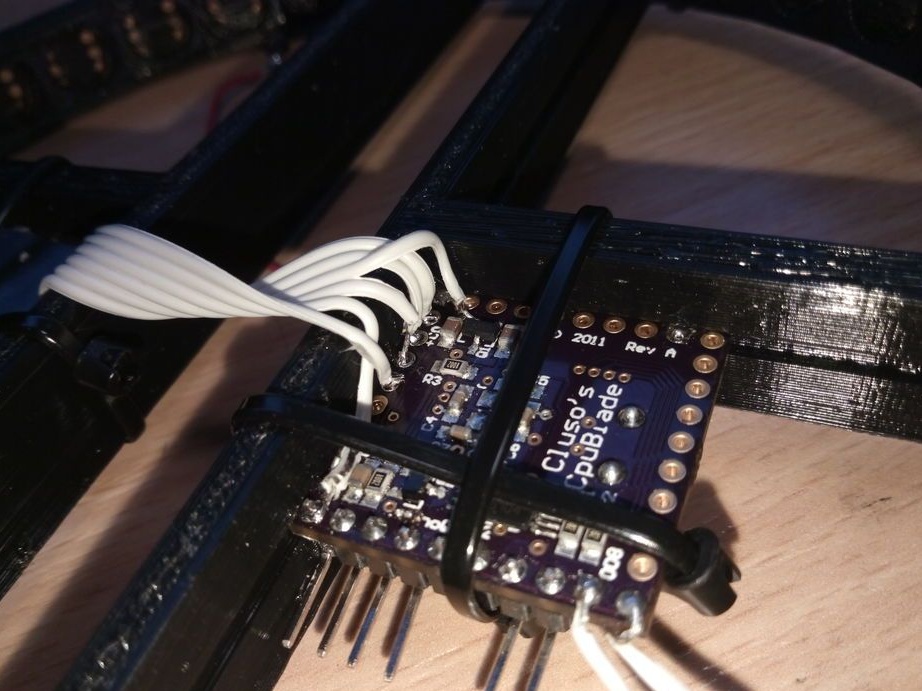
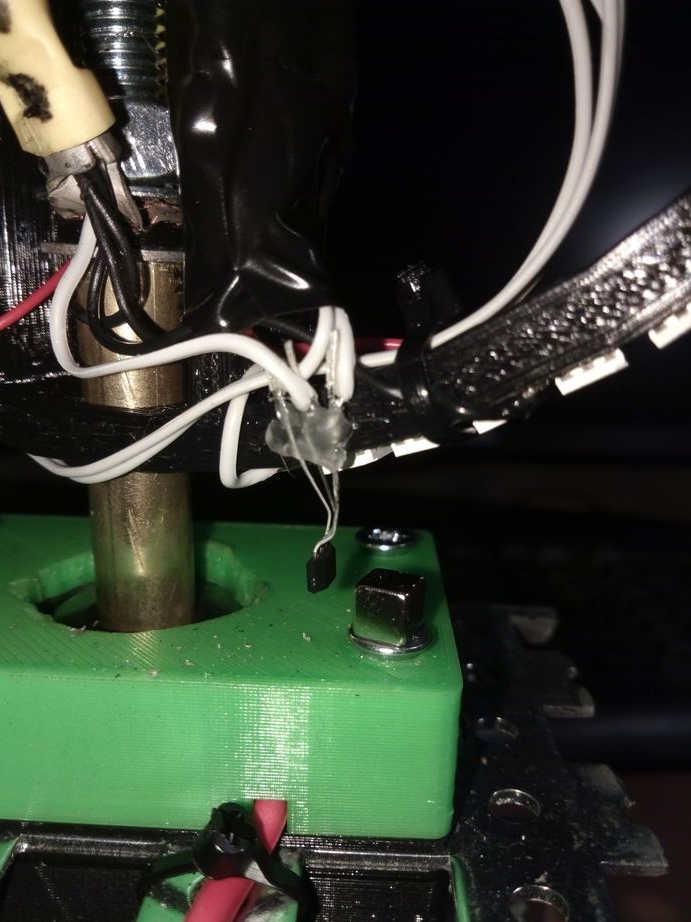
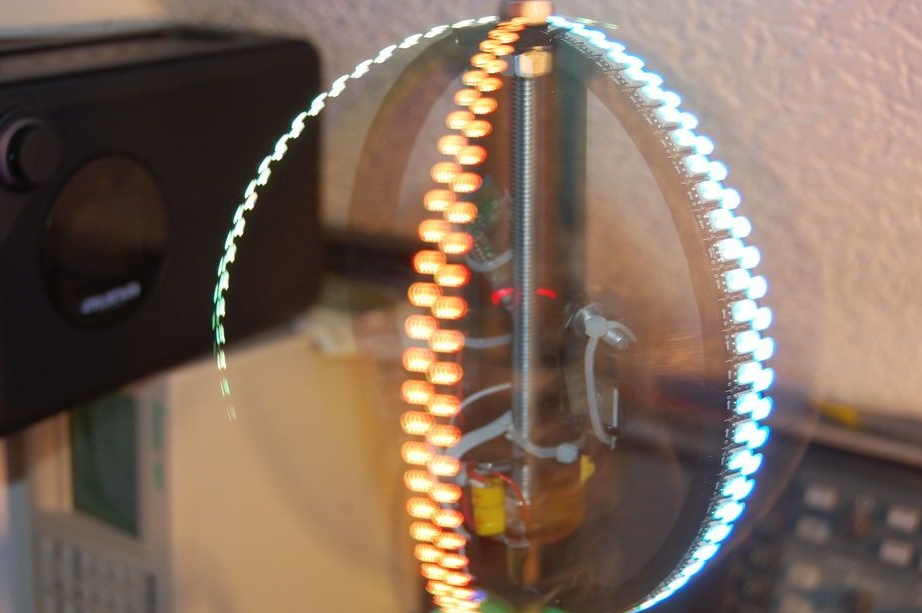
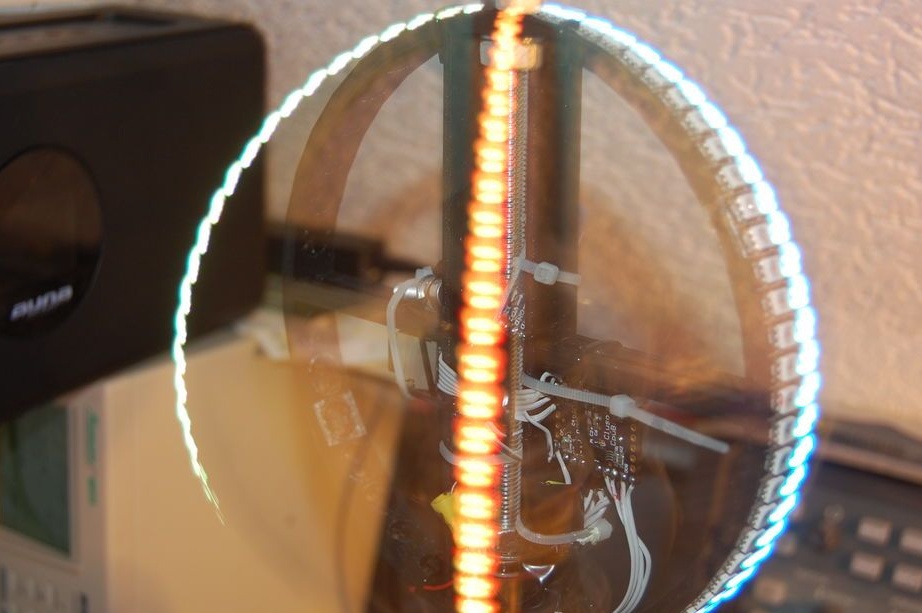
Die folgenden Fotos zeigen, wie alle Komponenten des Geräts miteinander verbunden werden. Das Foto zeigt auch den installierten Hallsensor mit einem Magneten.
Zum Programmieren des Parallax Propeller Microcontrollers benötigen Sie
Schließen Sie Ihr Gerät NICHT an einen USB- oder seriellen Anschluss an, bevor Sie die Software installiert haben. Weitere Informationen zum Hochladen von Firmware auf Parallax finden Sie hier
Der Autor verwendet eine ältere und dementsprechend weniger sparsame MCU-Karte, da er auf den neuen Controller-Karten keine neuen Bibliotheken finden kann.
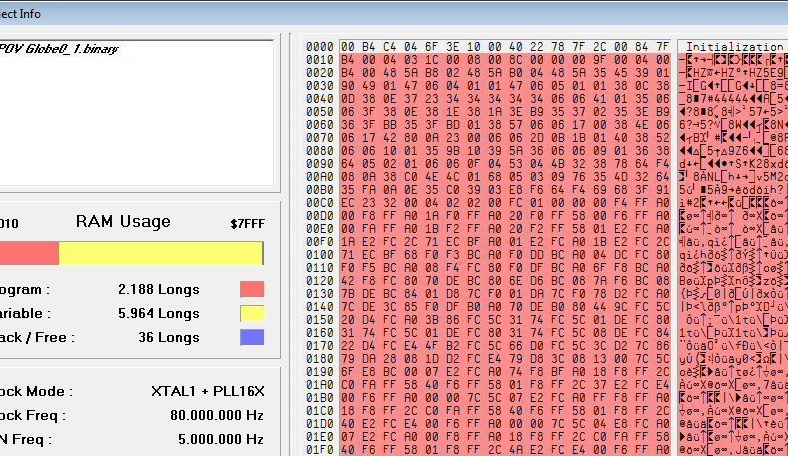
Nachdem Sie alles gesammelt und verbunden haben, müssen Sie den Controller programmieren. Der Autor tut dies mit Hilfe. Dateien mit Firmware im Archiv.
Jetzt können Sie versuchen, das Gerät zu starten. Kopieren Sie das Testbild von Anfang an auf die SD-Karte und fügen Sie es in den Steckplatz ein.
• Wenn Sie den Ring von Hand drehen, sollten die LEDs jedes Mal blinken, wenn der Hallsensor den Magneten passiert
• Schalten Sie den Motor ein. Um die Geschwindigkeit mit den Tasten zu erhöhen, muss sichergestellt werden, dass die LEDs wie auf 2 Fotos gezeigt aufleuchten
• Schließen Sie das Arduino-Terminal an die Motorsteuerung an.
• Merken Sie sich den angezeigten Wert.
• Stellen Sie den Motor ab
• Schreiben Sie den zuvor gespeicherten Wert in die Variable "startPos"Skizze POV_MotorControl
• Programmieren Sie das Arduino erneut.
Das nächste Mal startet Ihr Motor sofort mit der richtigen Geschwindigkeit. Jetzt können Sie jedes Bild auf der Karte "ausfüllen". Dazu müssen Sie die Bildgröße um 120 x 64 Pixel ändern, das Bild um 90 Grad gegen den Uhrzeigersinn drehen und vertikal spiegeln. Verringern Sie die Helligkeit des Bildes, da die LEDs sehr hell sind. Dazu ist es besser, eine Gammakorrektur mit einem Koeffizienten von 0,45 zu verwenden.
Bild als BPM 24 Bit speichern ohne Kompression. Nach allen Manipulationen hat die Ausgabedatei die Größe 23094 Byte.



